Изобретение относится к области измерения механических колебаний с помощью электронных средств и может быть использовано для бесконтактной и дистанционной регистрации вибраций и перемещений поверхности, способной отражать радиоволны.
Наиболее близким к изобретению является радиоволновой измеритель вибраций и перемещений, содержащий усилитель электрических сигналов, последовательно соединенные аттенюатор и излучающую катушку, подключенные к выходу усилителя, последовательно соединенные приемную катушку и фазовращатель, подключенные к входу усилителя, последовательно соединенные детектор и регистратор, подключенные к выходу усилителя, при этом излучающая и приемная катушки включены одна относительно другой в противофазе и расположены на ферритовом стакане, открытого с одной стороны и закороченного по магнитному потоку с другой стороны (Авторское свидетельство СССР №1479834, кл. G01H 11/06, 15.05.89 г.).
Недостатком данного устройства является отсутствие анализа динамики изменения параметров вибрации.
Цель изобретения - расширение области использования за счет определение времени достижении аварийного уровня вибрации на основе анализа динамики изменения параметров вибрации.
Данная цель достигается радиоволновым измерителем вибраций и перемещений, содержащим усилитель электрических сигналов, последовательно соединенные аттенюатор и излучающую катушку, подключенные к выходу усилителя, последовательно соединенные приемную катушку и фазовращатель, подключенные к входу усилителя, последовательно соединенные детектор и регистратор, подключенные к выходу усилителя, при этом излучающая и приемная катушки включены одна относительно другой в противофазе, дополнительно введены последовательно соединенные второй детектор и второй регистратор, подключенные к выходу усилителя, а также блок обработки сигналов, индикатор времени достижения аварийного уровня вибрации и индикатор аварийного уровня вибрации, причем первый и второй вход блока обработки сигналов подсоединены соответственно с выходами двух детекторов, а первый и второй выходы блока обработки сигналов соединены соответственно с индикатором времени достижения аварийного уровня вибрации и индикатором аварийного уровня вибрации.
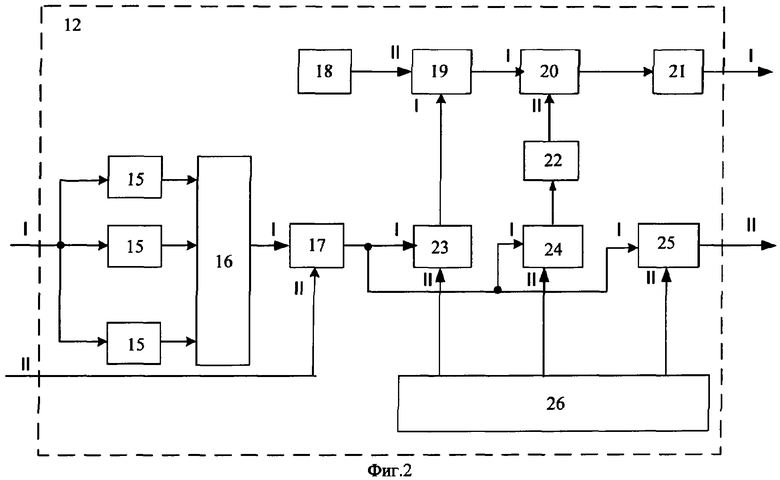
Кроме того, блок обработки сигналов состоит из n-фильтров, элемента ИЛИ, ключа, генератора импульсов первого и второго элемента И, счетчика, элемента И-НЕ, первого, второго и третьего пороговых устройств, задатчика постоянных сигналов, причем первый и второй входы блока обработки сигналов соединены соответственно со входами n-фильтров и со вторым входом ключа, выходы n-фильтров соединены со входами элемента ИЛИ, выход которого соединен с первым входом ключа, выход которого соединен с первыми входами первого, второго и третьего пороговых устройств, вторые входы которых соединены с выходами задатчика постоянных сигналов, выход первого порогового устройства соединен с первым входом первого элемента И, второй вход которого соединен с выходом генератора импульсов, выход первого элемента И соединен с первым входом второго элемента И, второго вход которого соединен с выходом элемент И-НЕ, вход которого соединен с выходом второго порогового устройства, выход третьего порогового устройства соединен с входом индикатора аварийного уровня вибрации, выход второго элемента И соединен через счетчик импульсов со входом индикатора времени достижения аварийного уровня вибрации
На фиг.1 приведена блок-схема устройства, на фиг.2 - структурная схема блока обработки информации.
Радиоволновой измеритель вибраций и перемещений содержит усилитель 1 электрических сигналов, последовательно соединенные аттенюатор 2, излучающую катушку 3, подключенные к выходу усилителя 1, приемную катушку 4, подключенную к входу усилителя 1, ферритового стакана 5, открытого с одной стороны и закороченного по магнитному потоку с другой, фазовращателя 6, последовательно соединенные первый детектор 7, первый регистратор 8, подключенные к выходу усилителя 1, исследуемый объект 9, последовательно соединенных второго детектора 10 и второго регистратора 11, подключенных к выходу усилителя 1, блок 12 обработки сигналов, индикатор 13 времени достижения аварийного уровня вибрации и индикатор 14 аварийного уровня вибрации, причем излучающая 3 и приемная 4 катушки намотаны на центральном керне ферритового стакана 5 и расположены в непосредственной близости друг от друга. Катушки 3 и 4 включены относительно друг друга в противофазе и являются ферритовыми антеннами. Первый и второй вход блока 12 обработки сигналов подсоединены соответственно с выходами первого 7 и второго 8 детекторов, а первый и второй выходы блока 12 обработки сигналов соединены соответственно с индикатором 13 времени достижения аварийного уровня вибрации и индикатором 14 аварийного уровня вибрации.
Блок 12 обработки сигналов состоит из n-фильтров 15, элемента ИЛИ 16, ключа 17, генератора 18 импульсов, первого 19 и второго 20 элемента И, счетчика 21 импульсов, элемента И-НЕ 22, первого 23, второго 24 и третьего 25 пороговых устройств, задатчика 26 постоянных сигналов, причем первый и второй входы блока 12 обработки сигналов соединены соответственно со входами n-фильтров 15 и со вторым входом ключа 17, выходы n-фильтров 15 соединены с входами элемента ИЛИ 16, выход которого соединен с первым входом ключа 17, выход которого соединен одновременно с первыми входами первого 23, второго 24 и третьих 25 пороговых устройств, вторые входы которых соединены с выходами задатчика 26 постоянных сигналов, выход первого 23 порогового устройства соединен с первым входом первого 19 элемента И, второй вход которого соединен с выходом генератора 18 импульсов, выход первого 19 элемента И соединен с первым входом второго 20 элемента И, второй вход которого соединен с выходом элемент И-НЕ 22, вход которого соединен с выходом второго 24 порогового устройства, выход третьего 25 порогового устройства соединен с входом индикатора 14 аварийного уровня вибрации, выход второго 20 элемента И соединен через счетчик 21 импульсов со входом индикатора 13 времени достижения аварийного уровня вибрации
Устройство работает следующим образом.
При наличии положительной обратной связи между выходом и входом усилителя и при создании баланса амплитуды и фазы усилитель 1 возбуждается и входит в автоколебательный режим с частотой, определяемой параметрами катушек 3 и 4, полосой пропускания усилителя, а также расстоянием между датчиками и исследуемым объектом.
В режиме автоколебаний сигнал последовательно проходит через следующие элементы: с выхода усилителя 1 через аттенюатор 2 электрический сигнал поступает на излучающую катушку 3, где он преобразуется в электромагнитное поле. Это поле распространяется как в сторону исследуемого объекта 9, так и непосредственно на приемную катушку 4. Поскольку катушка 4 включена противофазно по отношению к катушке 3, то на ней наводится сигнал с противоположным знаком, т.е. по этому пути между входом и выходом усилителя 1 существует отрицательная обратная связь. По этой причине усилитель возбудиться не может. Другая часть электромагнитного поля через открытую сторону ферритового стакана излучается катушкой 3 в сторону объекта 9 и, отразившись от него, через ту же открытую сторону ферритового стакана попадает на приемную катушку 4, где происходит обратное преобразование электромагнитного поля в электрический сигнал, который через фазовращатель 6 поступает на вход усилителя 1. Электромагнитное поле, пройдя путь: катушка 3 - объект 9 - катушка 4 имеет некоторый фазовый сдвиг. Подбором расстояния между катушками и объектом или подбором фазы фазовращателем 6 достигается положительный фазовый сдвиг отраженного от объекта сигнала и тем самым обеспечивается автоколебательный режим. Поскольку задняя стенка ферритового стакана закорочена по магнитному потоку, то излучение в ближней зоне практически направлено только в сторону измеряемого объекта.
Таким образом, устройство имеет две обратные связи. Одну отрицательную, идущую непосредственно через катушку и обеспечивающую развязку катушек между собой, и вторую положительную, идущую через пространство и исследуемый объект и обеспечивающую автоколебательный режим системы. При фиксированном расстоянии между объектами и катушками 3 и 4 параметры автоколебаний остаются постоянными. При изменении расстояния изменяется длина пути обратной связи, а следовательно, и фаза положительной обратной связи. Это приводит к изменению параметров автоколебаний. Эти изменения выделяются детектором 7 и регистрируются регистратором 8 в виде частоты, а второй детектор 10 и второй 11 регистратор определяют амплитуду вибрации. Сигналы с выходов первого 7 и второго 8 детекторов, кроме того, поступают на первый и второй входы блока 12 обработки сигналов. Сигнал с первого и со второго входов блока 12 обработки сигналов поступает соответственно на входы n-фильтров 15 на второй вход ключа 17. В случае соответствия сигналов полосе прохода фильтров, сигналы через n-фильтров 15 поступают через элемент ИЛИ 16, на первый вход ключа 17, на второй вход которого поступает сигнал с выхода второго 10 детектора. С выхода ключа 17 сигнал поступает на первые входы первого 23, второго 24 и третьего 25 пороговых устройств, на вторые входы которых поступают сигналы с выхода задатчика 26 постоянных сигналов.
На основе анализа динамики изменения уровня вибрации определяется временной интервал достижения аварийного уровня вибрации.
Это осуществляется следующим образом, с выхода первого 23 порогового устройства сигнал поступает на первый вход первого 19 элемента И, на второй вход которого поступает сигнал с выходом генератора 18 импульсов. С выхода первого 19 элемента И сигнал поступает на первый вход второго 20 элемента И, на второй вход которого поступает сигнал с выхода элемент И-НЕ 22, на вход которого поступает сигнал с выхода второго 24 порогового устройства. С выхода второго 20 элемента И сигнал поступает через счетчик 21 импульсов на вход индикатора 13 времени достижения аварийного уровня вибрации.
Таким образом, осуществляется измерения интервала времени между двумя динамически изменяющими уровнями вибрации за счет фиксации моментов срабатывания между первым 23 и вторым 24 пороговыми устройствами. В случаи достижения предельного значения уровня вибрации сигнал с выхода третьего 25 порогового устройства поступает на вход индикатора 14 аварийного уровня вибрации.
Таким образом, осуществляется определение времени достижения аварийного уровня вибрации на основе анализа динамики изменений параметров вибрации.
Источники информации
1. Авторское свидетельство СССР №1479834, кл. G01H 11/06, 15.05.89 г. (прототип)
| название | год | авторы | номер документа |
|---|---|---|---|
| ВИБРАЦИОННЫЙ СПОСОБ ДИАГНОСТИКИ НАЧАЛА ПРОЦЕССА РАЗРУШЕНИЯ В ЭЛЕМЕНТАХ КОНСТРУКЦИИ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2324929C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ОПАСНОЙ ВИБРАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2308006C1 |
| РАДИОЛОКАТОР ДЛЯ ЛЕГКОМОТОРНОГО САМОЛЕТА | 2009 |
|
RU2390795C1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ВИБРАЦИЙ | 2005 |
|
RU2282169C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАЛЫХ ЗАЗОРОВ | 2005 |
|
RU2310161C2 |
| МНОГОФУНКЦИОНАЛЬНЫЙ РАДИОЛОКАТОР | 2006 |
|
RU2315334C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2325306C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ ВЕРТОЛЕТА С ВЫСОКОВОЛЬТНЫМИ ЛИНИЯМИ ЭЛЕКТРОПЕРЕДАЧ | 2007 |
|
RU2326407C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368857C1 |
| УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЯ С ПРЕПЯТСТВИЕМ | 2010 |
|
RU2429506C1 |
Изобретение относится к измерительной технике и может быть использовано для бесконтактной и дистанционной регистрации вибраций и перемещений поверхности, способной отражать радиоволны. Техническим результатом изобретения является расширение области использования. Радиоволновой измеритель вибраций и перемещений содержит усилитель 1 электрических сигналов, аттенюатор 2, излучающую катушку 3, приемную катушку 4, ферритовый стакан 5, фазовращатель 6, первый детектор 7, первый регистратор 8, второй детектор 10 и второй регистратор 11, блок 12 обработки сигналов, индикатор 13 времени достижения аварийного уровня вибрации и индикатор 14 аварийного уровня вибрации. 1 з.п. ф-лы, 2 ил.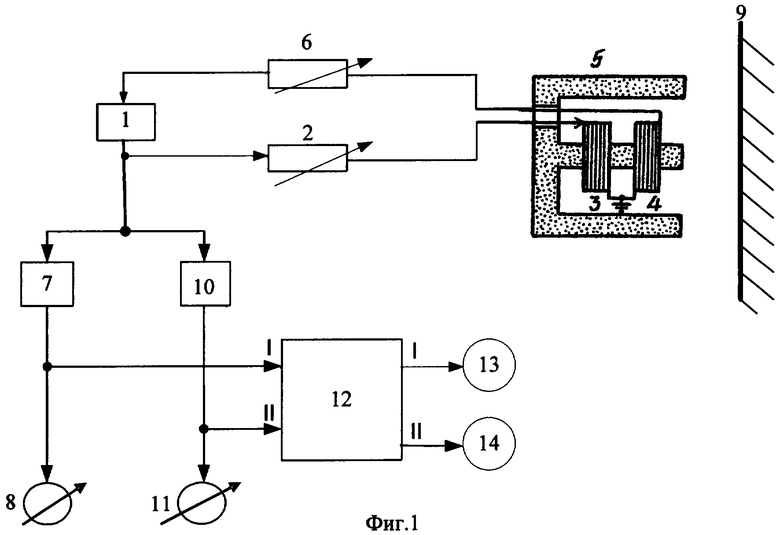
| Радиоволновой измеритель вибраций и перемещений | 1986 |
|
SU1479834A1 |
| Устройство для бесконтактного измерения расстояний | 1989 |
|
SU1760310A1 |
| Устройство для измерения вибраций и перемещений | 1980 |
|
SU1010470A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ВИБРАЦИЙ | 2001 |
|
RU2207522C2 |
| US 2005223801 A1, 13.10.2005. | |||

