Изобретение относится к локационным системам обеспечения безопасности автомобиля при движении.
Наиболее близким к изобретению является устройство предупреждения столкновений автомобиля с препятствием, которое содержит набор идентичных интегрированных модулей, включающих в себя несканирующую, астигматическую, приемопередающую оптическую систему, которая одновременно формирует диаграммы направленности импульсного дальномерного и непрерывного доплеровского оптических локаторов, работающих в разных диапазонах длин волн. К выходу импульсного дальномерного оптического локатора каждого модуля подключены m временных селекторов, выделяющих соответствующие интервалы дистанции до препятствия. К выходу непрерывного доплеровского оптическою локатора модуля подключены k полосовых частотных фильтра, выделяющих интервалы относительных скоростей сближения с препятствием. Выходы временных селекторов и полосовых частотных каждого модуля подключены к соответствующим входам системы обработки информации, в которую также поступает информация о собственной скорости автомобиля. Выходы системы обработки информации подключены к системам светового и звукового предупреждения водителя, которые с помощью световых и звуковых сигналов сообщают о наличии, направлении и расстоянии до препятствия, а также к бортовому компьютеру, управляющему параметрами движения автомобиля [1].
Недостатком данного устройства является невозможность определение времени сближения автомобиля до критического значения безопасной дистанции автомобиля до препятствия.
Цель изобретения - повышение безопасности эксплуатации автомобиля за счет определения времени сближения автомобиля до критического значения безопасной дистанции до препятствия.
Решение данной цели изобретения достигается устройством предупреждения столкновения автомобиля с препятствием, состоящим из набора идентичных интегрированных модулей, каждый из которых содержит приемопередающую оптическую систему, импульсный дальномерный и непрерывный доплеровский оптические локаторы, работающие на разных длинах волн, системы обработки информации, системы светового и системы звукового предупреждения, измерителя собственной скорости автомобиля и бортового компьютера автомобиля, при этом приемопередающая оптическая система каждого модуля выполнена несканирующей астигматической, сопряженной одновременно с импульсным дальномерным оптическим локатором и непрерывным доплеровским оптическим локатором, и формирующей стационарные по отношению к автомобилю диаграммы направленности этих локаторов, к выходу импульсного дальномерного оптического локатора подключены входы «m» временных селекторов, а к выходу непрерывного доплеровского оптического локатора подключены входы «k» полосовых частотных фильтров, выходы всех временных селекторов и полосовых частотных фильтров соединены с соответствующими входами системы обработки информации, идентифицирующей сектора приема сигналов от препятствий, интервалы расстояний до них, относительные скорости сближения и оценивающей степень опасности столкновения, к дополнительному входу системы обработки информации подключен выход измерителя собственной скорости автомобиля, к третьему выходу системы обработки информации присоединены входы систем звукового и светового предупреждения, которые с помощью звуковых и световых сигналов предупреждают водителя о направлении, расстоянии до препятствия и степени опасности столкновения с препятствием, а также вход бортового компьютера автомобиля, который выдает команды на системы управления и торможения автомобиля, в которое дополнительно введены блок определения условий сближения автомобиля с препятствием, индикатор времени сближения автомобиля до критического значения безопасной дистанции до препятствия, сигнализатор предупреждения о критическом значении безопасной дистанции автомобиля до препятствия, причем выход измерителя собственной скорости автомобиля, первый и второй выходы системы обработки информации, источник питания соединены соответственно с первым, вторым, третьим и четвертым входами блока определения условий сближения автомобиля с препятствием, первый и второй выходы которого соединены соответственно с входами индикатора времени сближения автомобиля до критического значения безопасной дистанции до препятствия, сигнализатора предупреждения о критическом значении безопасной дистанции автомобиля до препятствия, при этом с первого и второго выхода системы обработки информации выдаются сигналы соответствующие текущей дальности до препятствия и скорости сближения автомобиля с препятствием.
Кроме того, блок определения условий сближения автомобиля с препятствием состоит из вычитающего устройства, элемента ИЛИ, группы n-ключей, первого, второго и третьего задатчиков сигналов, n-первой группы, второго, третьего и четвертого пороговых устройств, делителя, дифференцирующей цепи, генератора импульсов, триггера, первого и второго элементов НЕ, элемента И, счетчика, причем первый, второй, третий и четвертый входы блока определений условий сближения автомобиля с препятствием являются соответственно вторыми входами n-первых пороговых устройств, первыми входами вычитающего устройства, делителя и входом дифференцирующей цепи, второй вход вычитающего устройства соединен с выходом элемента ИЛИ, выход вычитающего устройства соединен со вторым входом делителя, выход которого соединен со вторыми входами второго, третьего и четвертого пороговых устройств, первые входы которых соединены с выходами третьего задатчика сигналов, выход второго порогового устройства через первый элемент НЕ соединен с первым входом триггера, второй вход которого соединен с выходом дифференцирующей цепи, выход которой также соединен со вторым входом счетчика, выход триггера соединен с первым входом элемента И, второй и третий входы которого соединены соответственно с выходами генератора импульсов и третьего порогового устройства, выход элемента И соединен с первым входом счетчика, выходы второго задатчика соединены с первыми входами первой группы n-пороговых устройств, выходы которых соединены со вторыми входами ключей, первые входы которых соединены с выходами первого задатчика сигналов, выходы ключей соединены со входами элемента ИЛИ, выход четвертого пороговых устройств соединен со входом второго элемента НЕ, выходы счетчика и второго элемента НЕ являются соответственно первым и вторым выходами блока определения условий сближения автомобиля с препятствием.
Новыми элементами, обладающими существенными отличиями по устройству, являются блок определения условий сближения автомобиля с препятствием, индикатор времени сближения автомобиля до критического значения безопасной дистанции до препятствия, сигнализатор предупреждения о критическом значении безопасной дистанции автомобиля до препятствия и связи между известными и новыми элементами.
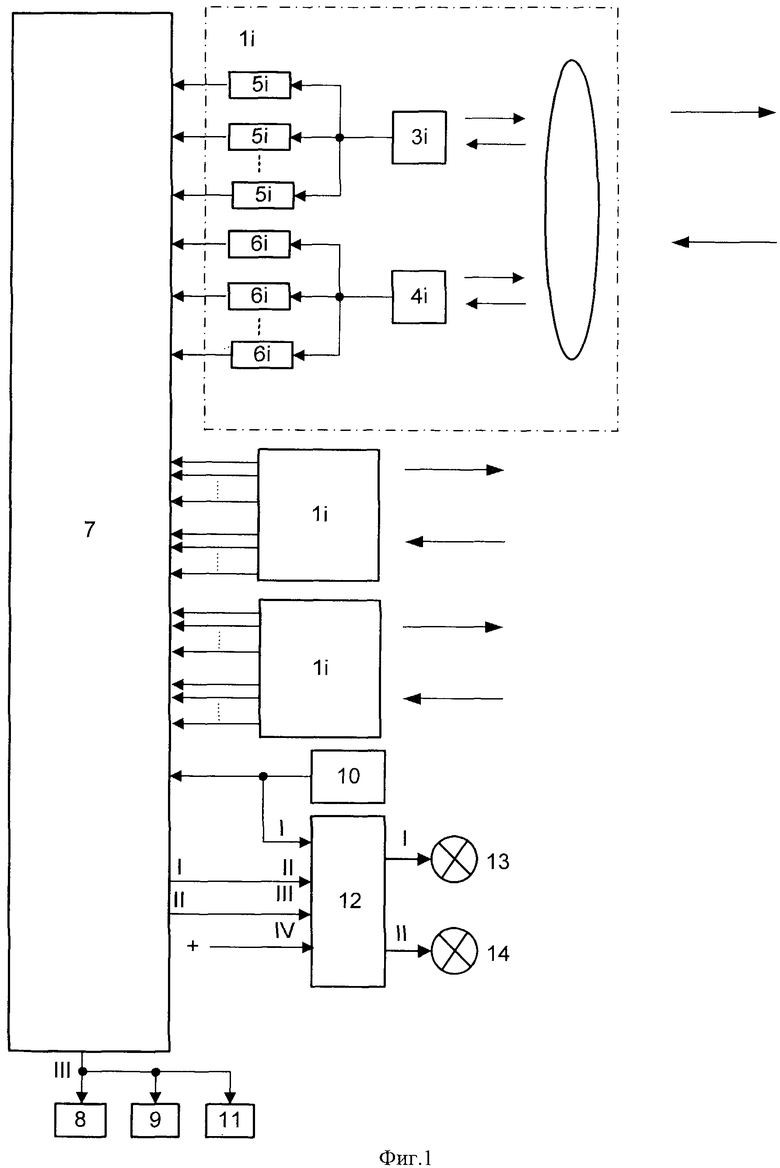
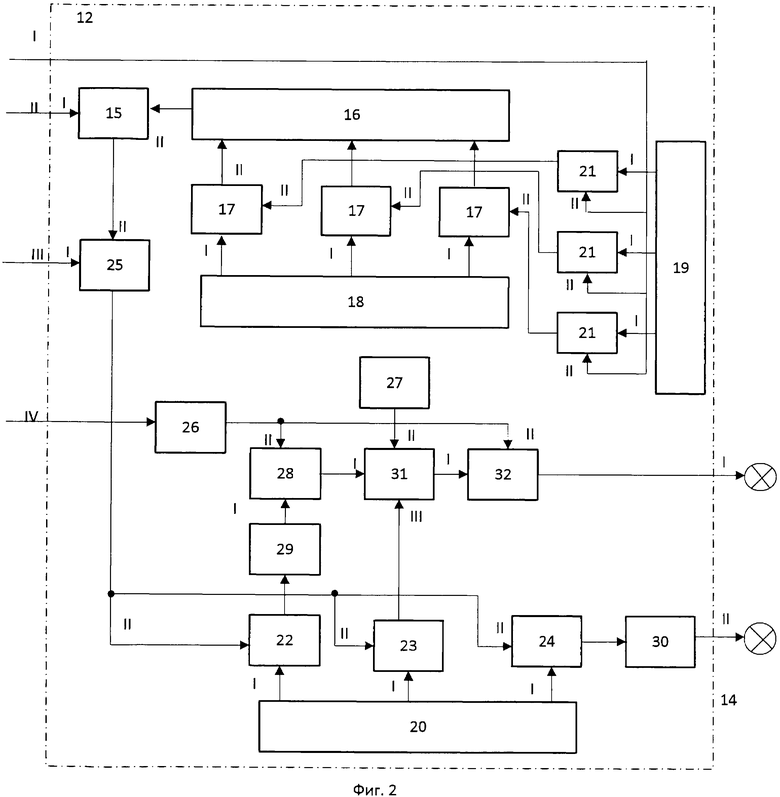
На фиг.1 представлена структурная схема устройства предупреждения столкновения автомобиля с препятствием, на фиг.2 - блока прогнозирования безопасной дистанции до препятствия средства.
Устройство содержит (фиг.1) интегрированные модули 1i, несканирующие астигматические приемопередающие оптические системы 2i, импульсные дальномерные оптические локаторы 3i, непрерывные доплеровские оптические локаторы 4i, где i=l…n, временные селекторы 5ij, где j=l…m, полосовые частотные фильтры 6it, где t=l…k, система обработки информации 7, система звукового предупреждения 8, система светового предупреждения 9, измеритель собственной скорости автомобиля 10, бортовой компьютер автомобиля 11, блок 12 определения условий сближения автомобиля с препятствием, индикатор 13 времени сближения автомобиля до критического значения безопасной дистанции до препятствия, сигнализатор 14 предупреждения о критическом значении безопасной дистанции автомобиля до препятствия.
Блок 12 определения условий сближения автомобиля с препятствием состоит (фиг.2) из вычитающего устройства 15, элемента ИЛИ 16, группы n-ключей 17, первого 18, второго 19 и третьего 20 задатчиков сигналов, n-первой 21 группы, второго 22, третьего 23 и четвертого 24 пороговых устройств, делителя 25, дифференцирующей цепи 26, генератора 27 импульсов, триггера 28, первого 29 и второго 30 элементов НЕ, элемента И 31, счетчика 32.
Устройство предупреждения столкновения автомобиля с препятствиями работает следующим образом.
Каждый из интегрированных модулей 1i устройства расположен и ориентирован на автомобиле таким образом, что отвечает за свой сектор наблюдения за дорожной обстановкой, при этом несканирующие астигматические приемопередающие оптические системы 2i формируют диаграммы направленности импульсного дальномерного оптического локатора 3i и непрерывного доплеровского оптического локатора 4i. Диапазон дальности обнаружения импульсного дальномерного оптического локатора 3i с помощью временных селекторов 5ij разбит на ряд интервалов, величины которых определяются совокупностью таких параметров, как дальность обнаружения, предельная относительная скорость сближения с препятствием, время реакции водителя, быстродействие системы торможения и другие. Аналогично диапазон измерения относительных скоростей сближения с препятствием с непрерывного доплеровского оптического локатора 4i при помощи полосовых частотных фильтров 6it разбит на ряд интервалов относительных скоростей сближения. В случае появления препятствия на пути движения автомобиля сигналы с импульсного дальномерного оптического локатора 3i и непрерывного доплеровского оптического локатора 4i, несущие информацию о расстоянии, направлении и скорости сближения с препятствием, через соответствующие временные селекторы 5ij и полосовые частотные фильтры 6it поступают в систему обработки информации 7. Одновременно в нее поступают сигналы с измерителя собственной скорости автомобиля 10. Система обработки информации 7 проводит идентификацию секторов приема сигналов от препятствия, определяет интервалы расстояний до них, относительные скорости сближения и оценивает степень опасности столкновения. Сигналы предупреждения о наличии, направлении и степени сближения с препятствием выводятся на систему звукового предупреждения 8 и систему светового предупреждения 9 в наиболее простой, наглядной и эргономичной форме, не требующей отвлечения водителя от дорожной обстановки. В случае аварийной обстановки или замедленной реакции водителя система обработки информации 7 через бортовой компьютер 11 приводит в действие систему управления или экстренно.
Блок 12 определения условий сближения автомобиля с препятствием предназначен для определения времени сближения автомобиля до опасной дистанции до препятствия, при этом сигнал с выхода измерителя 10 собственной скорости автомобиля поступает на первый вход блока определений условий сближения и соответственно на вторые входы первой 21 группы n-пороговых устройств, на первые входы которых поступают сигналы с выходов второго 19 задатчика сигналов.
Первая 21 группы n-пороговых устройств, предназначена для определения диапазона скоростей движения автомобиля.
В зависимости от диапазона скоростей движения автомобиля сигналы с соответствующих выходов первой группы 21 n-пороговых устройств поступают на соответствующие вторые входы ключей 17, на первые входы которых поступают соответствующие эталонные сигналы SТЭ с одного из выходов первого 18 задатчика сигналов.
Таким образом определяется эталонное значение тормозного пути автомобиля в зависимости от его скорости движения.
Вычитающее устройство 15 обеспечивает вычитание сигналов, с одной стороны, соответствующее значению текущей дальности до препятствия Sтек, а с другой стороны, соответствующему эталонному значению тормозного пути SТэ, при этом сигнал, соответствующий SТэ с выхода одного из ключей 17, через элемент ИЛИ 16 поступает на второй вход вычитающего устройства 15, на первый вход которого поступает сигнал, соответствующий Sтек с первого выхода системы 7 обработки информации.
С выхода вычитающего устройства 15 сигнал, соответствующий значению Sтек-SТэ поступает на второй вход делителя 25, на первый вход которого поступает сигнал, соответствующий значению Vсбл с второго выхода системы 7 обработки информации.
Второе 22, третье 23 и четвертое 24 пороговые устройства обеспечивают фиксацию моментов прохода автомобилем трех заданных значений дистанций до препятствия, при этом сигнал, соответствующий значению  с выхода делителя 25, поступает на вторые входы второго 22, третьего 23 и четвертого 24 пороговых устройств, на первые входы которых поступают сигналы с выходов третьего 20 задатчика сигналов.
с выхода делителя 25, поступает на вторые входы второго 22, третьего 23 и четвертого 24 пороговых устройств, на первые входы которых поступают сигналы с выходов третьего 20 задатчика сигналов.
При этом на первом и втором и третьим выходах третьего задачика формируются сигналы с постоянными значениями к1, к2 и «0».
В процессе сближения автомобиля с препятствием, в момент времени при достижении значения сигналов на входах второго порогового устройства  с выхода второго 22 порогового устройства сигнал через первый 29 элемент НЕ поступает на первый вход триггера 28, на второй вход которого и счетчика 32 импульсов поступает сигнал обнуления с выхода дифференцирующей цепи 26, с выхода триггера 28 сигнал поступает на первый вход элемента И 31, на второй и третий входы которого поступают сигналы соответственно с выхода генератора 27 импульсов и третьего 23 порогового устройства, при этом с выхода элемента И 31 сигналы поступают на первый вход счетчика 32.
с выхода второго 22 порогового устройства сигнал через первый 29 элемент НЕ поступает на первый вход триггера 28, на второй вход которого и счетчика 32 импульсов поступает сигнал обнуления с выхода дифференцирующей цепи 26, с выхода триггера 28 сигнал поступает на первый вход элемента И 31, на второй и третий входы которого поступают сигналы соответственно с выхода генератора 27 импульсов и третьего 23 порогового устройства, при этом с выхода элемента И 31 сигналы поступают на первый вход счетчика 32.
В процессе сближения автомобиля с препятствием, в момент времени достижения сигналов на входах третьего порогового устройства значения  снимается сигнал с выхода третьего 23 порогового устройства и соответственно с третьего входа элемента И 31.
снимается сигнал с выхода третьего 23 порогового устройства и соответственно с третьего входа элемента И 31.
При этом сигнал с выхода счетчика 32 поступает на вход индикатора 13 времени сближения автомобиля до критического значения безопасной дистанции до препятствия.
В процессе сближения автомобиля с препятствием, в момент времени достижения сигналов на входах четвертого порогового устройства значения  снимается сигнал с выхода четвертого 24 порогового устройства и через второй 30 элемент НЕ поступает на вход сигнализатора 14 предупреждения о критическом значении безопасной дистанции автомобиля до препятствия.
снимается сигнал с выхода четвертого 24 порогового устройства и через второй 30 элемент НЕ поступает на вход сигнализатора 14 предупреждения о критическом значении безопасной дистанции автомобиля до препятствия.
Таким образом, обеспечивается повышения безопасности эксплуатации автомобиля в процессе его сближения с препятствием за счет определения времени до критического значении безопасной дистанция автомобиля до препятствия.
Источники информации
1. Коннов В.П., Польский Ю.Е., патент на изобретение РФ №2348948, 10.03.2009 г., кл. МПК G01S 13/93 (2006.01). патентообладатель: Закрытое акционерное общество "Научно-производственное предприятие "Мифотекс"
Изобретение относится к локационным системам обеспечения безопасности автомобиля при движении. Сущность изобретения заключается в том, что в устройство предупреждения столкновения автомобиля с препятствием дополнительно введены блок определения условий сближения автомобиля с препятствием, выполненный определенным образом, индикатор времени сближения автомобиля до критического значения безопасной дистанции до препятствия, сигнализатор предупреждения о критическом значении безопасной дистанции автомобиля до препятствия, причем выход измерителя собственной скорости автомобиля, первый и второй выходы системы обработки информации, источник питания соединены соответственно с первым, вторым, третьим и четвертым входами блока определения условий сближения автомобиля с препятствием, первый и второй выходы которого соединены соответственно с входами индикатора времени сближения автомобиля до критического значения безопасной дистанции с препятствием, сигнализатора предупреждения о критическом значении безопасной дистанции до препятствия. Достигаемый технический результат - повышение безопасности эксплуатации автомобиля. 1 з.п. ф-лы, 2 ил.
1. Устройство предупреждения столкновения автомобиля с препятствием, состоящее из набора идентичных интегрированных модулей, каждый из которых содержит приемопередающую оптическую систему, импульсный дальномерный и непрерывный доплеровский оптические локаторы, работающие на разных длинах волн, системы обработки информации, системы светового и звукового предупреждения, измерителя собственной скорости автомобиля и бортового компьютера автомобиля, причем приемопередающая оптическая система каждого модуля выполнена несканирующей астигматической, сопряженной одновременно с импульсным дальномерным оптическим локатором и непрерывным доплеровским оптическим локатором и формирующей стационарные по отношению к автомобилю диаграммы направленности этих локаторов, при этом к выходу импульсного дальномерного оптического локатора подключены входы m временных селекторов, а к выходу непрерывного доплеровского оптического локатора подключены входы k полосовых частотных фильтров, выходы всех временных селекторов и полосовых частотных фильтров соединены с соответствующими входами системы обработки информации, идентифицирующей сектора приема сигналов от препятствий, интервалы расстояний до них, относительные скорости сближения и оценивающей степень опасности столкновения, к дополнительному входу системы обработки информации подключен выход измерителя собственной скорости автомобиля, к третьему выходу системы обработки информации присоединены входы систем звукового и светового предупреждения, которые с помощью звуковых и световых сигналов предупреждают водителя о направлении, расстоянии до препятствия и степени опасности столкновения с препятствием, а также вход бортового компьютера автомобиля, который выдает команды на системы управления и торможения автомобиля, отличающееся тем, что дополнительно введены блок определения условий сближения автомобиля с препятствием, индикатор времени сближения автомобиля до критического значения безопасной дистанции до препятствия, сигнализатор предупреждения о критическом значении безопасной дистанции автомобиля до препятствия, причем выход измерителя собственной скорости автомобиля, первый и второй выходы системы обработки информации, источник питания соединены соответственно с первым, вторым, третьим и четвертым входами блока определения условий сближения автомобиля с препятствием, первый и второй выходы которого соединены соответственно с входами индикатора времени сближения автомобиля до критического значения безопасной дистанции с препятствием, сигнализатора предупреждения о критическом значении безопасной дистанции автомобиля до препятствия, при этом с первого и второго выходов системы обработки информации выдаются сигналы соответствующие текущей дальности до препятствия и скорости сближения автомобиля с препятствием.
2. Устройство по п.2, отличающееся тем, что блок определения условий сближения автомобиля с препятствием состоит из вычитающего устройства, элемента ИЛИ, группы n - ключей, первого, второго и третьего задатчиков сигналов, n - первой группы пороговых устройств, второго, третьего и четвертого пороговых устройств, делителя, дифференцирующей цепи, генератора импульсов, триггера, первого и второго элементов НЕ, элемента И, счетчика, причем первый, второй, третий и четвертый входы блока определений условий сближения автомобиля с препятствием являются соответственно вторыми входами n - первой группы пороговых устройств, первыми входами вычитающего устройства, делителя и входом дифференцирующей цепи, второй вход вычитающего устройства соединен с выходом элемента ИЛИ, а выход вычитающего устройства соединен со вторым входом делителя, выход которого соединен со вторыми входами второго, третьего и четвертого пороговых устройств, первые входы которых соединены с выходами третьего задатчика сигналов, выход второго порогового устройства через первый элемент НЕ соединен с первым входом триггера, второй вход которого соединен с выходом дифференцирующей цепи, выход которой также соединен со вторым входом счетчика, выход триггера соединен с первым входом элемента И, второй и третий входы которого соединены соответственно с выходами генератора импульсов и третьего порогового устройства, выход элемента И соединен с первым входом счетчика, выходы второго задатчика соединены с первыми входами первой группы n - пороговых устройств, выходы которых соединены со вторыми входами ключей, первые входы которых соединены с выходами первого задатчика сигналов, выходы ключей соединены с входами элемента ИЛИ, выход четвертого порогового устройства соединен с входом второго элемента НЕ, выходы счетчика и второго элемента НЕ являются соответственно первым и вторым выходами блока определения условий сближения автомобиля с препятствием.
| УСТРОЙСТВО ПРЕДУПРЕЖДЕНИЯ СТОЛКНОВЕНИЯ АВТОМОБИЛЯ С ПРЕПЯТСТВИЕМ | 2007 |
|
RU2348948C2 |
| РАДАР БЕЗОПАСНОСТИ ДВИЖЕНИЯ АВТОМОБИЛЬНОГО ТРАНСПОРТА | 1992 |
|
RU2092869C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ СТОЛКНОВЕНИЙ АВТОМОБИЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2050561C1 |
| УСТРОЙСТВО ДЛЯ ПРЕДУПРЕЖДЕНИЯ АВАРИЙНЫХ СИТУАЦИЙ НА ЖЕЛЕЗНОДОРОЖНЫХ ПЕРЕЕЗДАХ | 2006 |
|
RU2330774C2 |
| US 2007252749 A1, 01.11.2007 | |||
| US 6211907 В1, 03.04.2001 | |||
| Способ приготовления водотопливных эмульсий | 1989 |
|
SU1690828A1 |

