Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов вертикального взлета и посадки.
Известен летательный аппарат вертикального взлета и посадки (патент RU №2700154, МПК В64С 27/30, В64С 37/00, опубл. 12.09.2019 г.), содержащий фюзеляж, киль, пару крыльев (переднее и заднее), две подъемные силовые установки, расположенные на установленный по бокам фюзеляжа пилонах с двумя осями вращения и с возможностью фиксации положения, маршевую силовую установку. Оси вращения пилонов подъемных силовых установок по углу рыскания наклонены относительно связанной системы координат и выполнены с возможностью укладки подъемных силовых установок в нишу фюзеляжа. Оси вращения подъемных силовых установок по углу тангажа наклонены относительно пилонов с возможностью обеспечения поворота подъемных силовых установок во взлетно-посадочном режиме полета по углу тангажа. Подъемные силовые установки выполнены с возможностью складывания в нишу фюзеляжа совместным поворотом относительно обеих осей поворота пилона, причем подъемные силовые установки при этом переворачиваются винтами вниз. Обеспечивается увеличение надежности, устойчивости и управляемости летательного аппарата во взлетно-посадочном режиме полета.
Недостатки известного устройства заключаются в следующем:
1. Уменьшение надежности и живучести вследствие сложности конструкции уборки подъемных силовых установок.
2. Неоднозначность управления летательным аппаратом (ЛА) на взлетно-посадочном режиме полета из-за наклонной оси вращения пилона, в результате чего происходит отклонение вектора подъемной силы от вертикали в двух плоскостях, что усложняет работу автоматики стабилизации и управления.
3. Неизбежное увеличение габаритов фюзеляжа из-за ниш уборки подъемных силовых установок (ПСУ), что увеличивает лобовое сопротивление, вес аппарата и усложняет конструкцию фюзеляжа.
4. Уменьшение полезного объема фюзеляжа из-за ниш уборки ПСУ.
5. Существенное изменение центровки аппарата при уборке массивных ПСУ вперед или назад, что требует дополнительных мер для устранения этого эффекта.
6. Изменение центровки вследствие выработки топлива или сброса груза затрудняет работу автоматики управления и стабилизации па режиме взлета-посадки из-за фактора, указанного в п. 2
7. Сомнительная целесообразность использования системы уборки ПСУ.
8. Отсутствие складывания крыла и оперения для уменьшения транспортировочных габаритов аппарата.
Известен конвертоплан (см. патент RU №27235 16, МПК В64С 27/28, В64С 37/00, опубл. 11.06.2020 г.), содержащий фюзеляж, систему управления, аэродинамические консоли крыла с аэродинамическими управляющими поверхностями, цельноповоротное переднее горизонтальное оперение с аэродинамическими управляющими поверхностями, хвостовое оперение и винтомоторные группы с воздушными винтами. Винтомоторные группы с воздушными винтами размещены с возможностью поворота на законцовках переднего горизонтального оперения и па хвостовом оперении. Конвертоплан выполнен с возможностью обеспечения совпадения аэродинамического центра давления и результирующего вектора тяги, с возможностью их взаимного динамического и статического скалярного управления за счет работы аэродинамических управляющих поверхностей и управления вектором тяги каждой из винтомоторных групп. Винтомоторные группы, расположенные на законцовках переднего горизонтального оперения, выполнены с встречным вращением воздушного винта и с возможностью обеспечения динамического смещения центра давления, а также возможностью смещения оси вращения передних ВМГ в плоскости ZX.
Недостатки известного устройства заключаются в следующем:
1. Снижение надежности и живучести вследствие сложности конструкции отклонения подъемных силовых установок в разных плоскостях.
2. Три подъемных двигателя одинаковой повышенной мощности с системами регулирования и питания.
3. Необходимость использования винтов изменяемого шага, что усложняет конструкцию СУ.
4. Перекрывание части воздушного потока от винтов плоскостями ПГО и фюзеляжем на взлетно-посадочном режиме.
5. Сложность системы автоматического управления из-за многовекторности СУ.
6. Неоптимальность использования одних и тех же двигателей и винтов для режимов подъема и горизонтального полета даже с учетом ВИШ.
7. Усложнение конструкции - крыло обратной стреловидности менее жесткое на кручение и требует дополнительного усиления.
8. Отсутствие возможности складывания крыла и оперения для уменьшения транспортировочных габаритов аппарата.
Техническая задача изобретения состоит в упрощении конструкции подъемной силовой установки, в увеличении надежности БПЛА, в улучшении устойчивости аппарата на режиме взлета-посадки, в обеспечении упрощения и однозначности работы системы управления летательного аппарата, в обеспечении возможности изменения характеристик устойчивости и управляемости аппарата в горизонтальном полете, в возможности компенсации изменения центровки на режиме взлета-посадки после сброса полезной нагрузки, в минимизации торможения потока воздуха от подъемных винтов на режиме взлета-посадки и аэродинамического сопротивления пилонов ПСУ в горизонтальном полете, в улучшении путевой устойчивости ЛА в горизонтальном полете, в уменьшении транспортных габаритов БПЛА.
Заявляется беспилотный летательный аппарат (БПЛА), включающий фюзеляж с неподвижным крылом и передним горизонтальным оперением, подъемную силовую установку, маршевую силовую установку, средства управления но курсу, посадочное устройство.
Особенность заключается в том, что фюзеляж состоит из верхней и нижней стеклопластиковых сэндвич-панелей, отсека управления отклонениями пилонов; крыло состоит из двух консолей, склеенных из нижней и верхней стеклопластиковых сэндвич-панелей, лонжеронов консолей крыла, штырей фиксации консолей крыла в сложенном состоянии, а также концевых аэродинамических поверхностей с прикрепленными к ним шарнирно курсовыми щитками, двух интерцепторов, шарнирно закрепленных на верхних панелях; переднее горизонтальное оперение состоит из двух консолей, склеенных из нижней и верхней стеклопластиковых сэндвич-панелей, штырей фиксации консолей переднего горизонтального оперения в сложенном состоянии и двух рулей высоты, шарнирно прикрепленных к нижним панелям в вырезах консолей переднего горизонтального оперения; подъемные силовые установки состоят из двух, оснащенных подъемными винтами электродвигателей, закрепленных на моторамах, оборудованных сервоприводами управления поворотом подъемной силовой установки вокруг поперечных полуосей шкворней, двух вилок крепления шкворней, двух карболовых трубок пилонов, двух вилок пилонов, двух подшипниковых узлов с подшипниками, рычагов отклонения пилонов, сервопривода отклонения пилонов, тяги отклонения пилонов, тяги синхронизирующей отклонения пилонов, двух рычагов шкворня, двух тяг параллелограммных, крепежных и осевых винтов, двух обтекателей пилонов поворотных; маршевую силовую установку, состоящую из электрического двигателя или двигателя внутреннего сгорания, толкающего воздушного винта, кока воздушного винта; посадочное устройство состоит из носовой опоры и посадочной рессоры, максимально удаленной назад от центра тяжести аппарата и имеющей большую площадь поверхности, что обеспечивает функцию дополнительного вертикального оперения.
Кроме того, для управления по курсу па концевых аэродинамических поверхностях крыла установлены щитки, отклоняемые наружу попеременно, а поворотные обтекатели пилонов силовой установки свободно вращаются на трубках пилонов от набегающего потока воздуха, что в режиме взлета обеспечивает уменьшение экранирования подъемных винтов БПЛА, а в режиме горизонтального полета снижает силу аэродинамического сопротивления пилонов подъемной силовой установки.
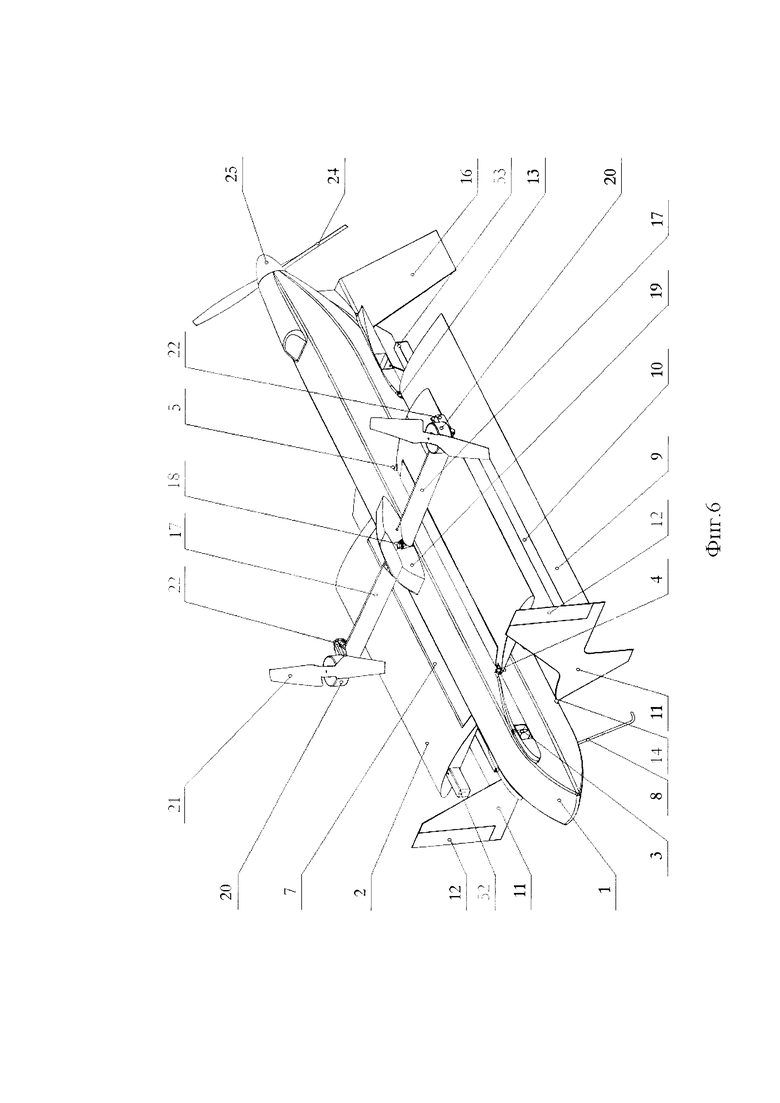
Подъемные силовые установки вместе с пилонами выполнены с возможностью поворота вперед вокруг передних винтов крепления вилки пилона и складывания вдоль фюзеляжа, а консоли крыла выполнены с возможностью поворота вперед вокруг осевых винтов, складывания вдоль фюзеляжа, фиксации штырями в гнездах. Консоли переднего горизонтального оперения выполнены с возможностью поворота назад вокруг осевых винтов, складывания вдоль фюзеляжа, фиксации штырями в гнездах.
Заявляется способ управления БПЛА по каналу тангажа, включающий перемещение посредством сервопривода подъемных силовых установок вперед-назад, отклонение векторов подъемной силы подъемной силовой установки.
Особенность заключается в том, что перемещения подъемной силовой установки вперед-назад сервоприводом производят параллельно горизонтальной плоскости БПЛА посредством отклоняемых пилонов с параллелограмными тягами, а отклонение векторов подъемной силы подъемной силовой установки как в одном, так и в противоположном направлениях осуществляют относительно поперечной оси аппарата сервоприводами управления поворотом подъемной силовой установки вокруг поперечных шкворней, закрепленными на моторамах. Смещение масс неработающих подъемных силовых установок вперед-назад в продольном направлении осуществляется путем отклонения пилонов с обеспечением характеристик устойчивости и управляемости аппарата в горизонтальном полете ввиду изменения центровки БПЛА.
Конструкция БПЛА представлена на фигурах.
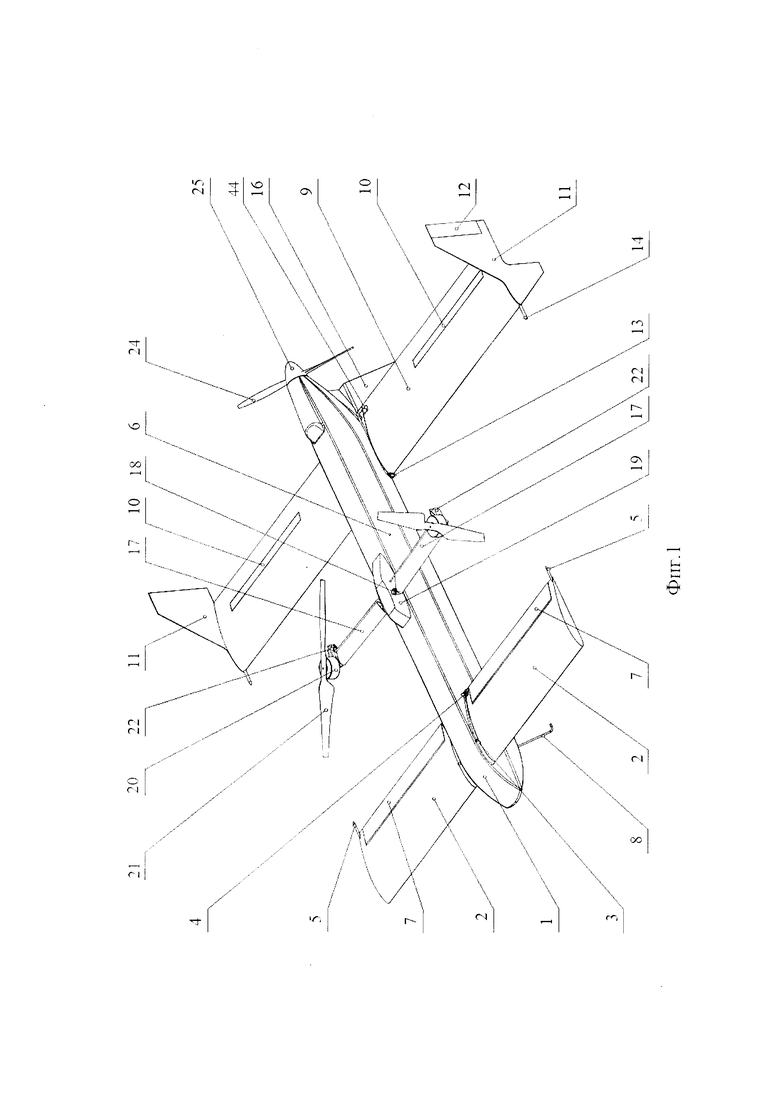
Фиг. 1 - общий вид БПЛА с двумя подъемными электрическими двигателями и тянущими воздушными винтами и одним маршевым электрическим (или ДВС) двигателем с толкающим воздушным винтом.
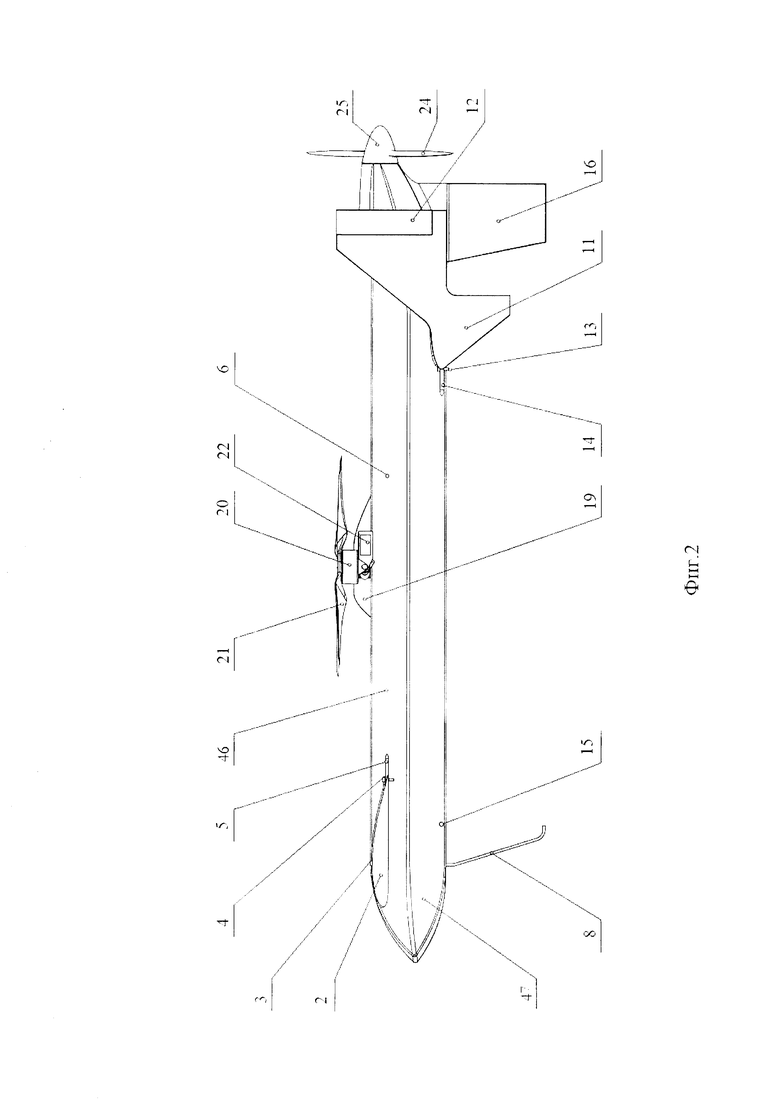
Фиг. 2 - вид БПЛА сбоку.
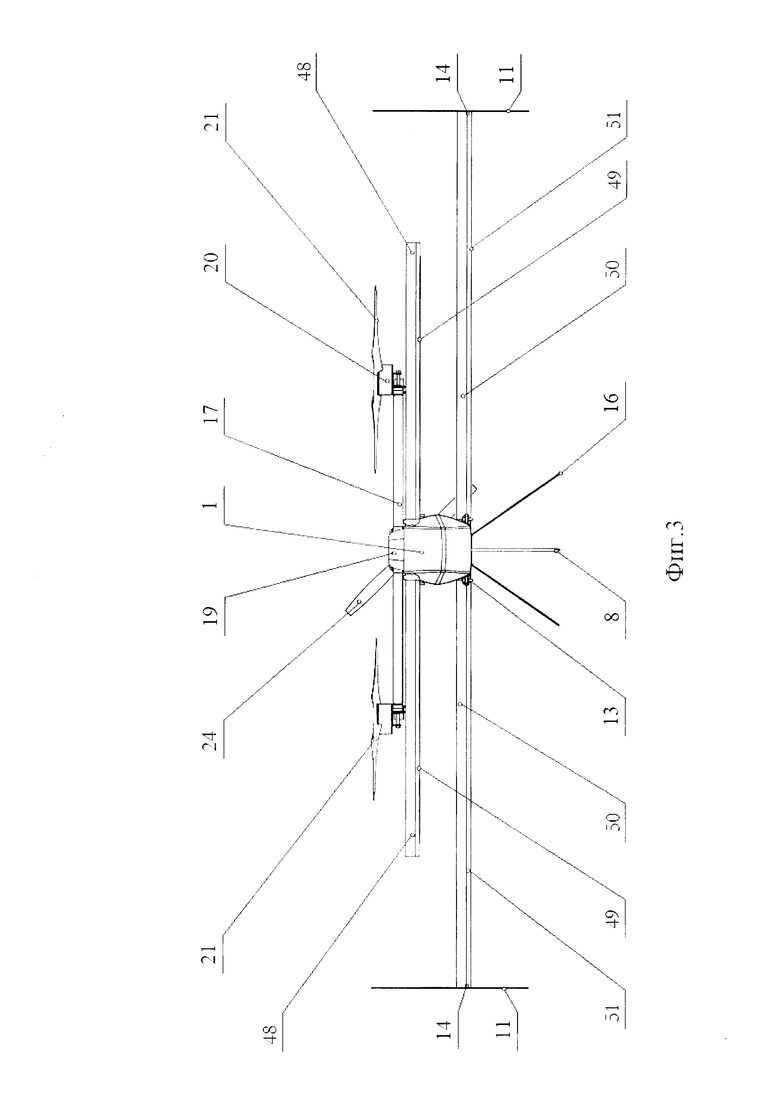
Фиг. 3 - вид БПЛА спереди.
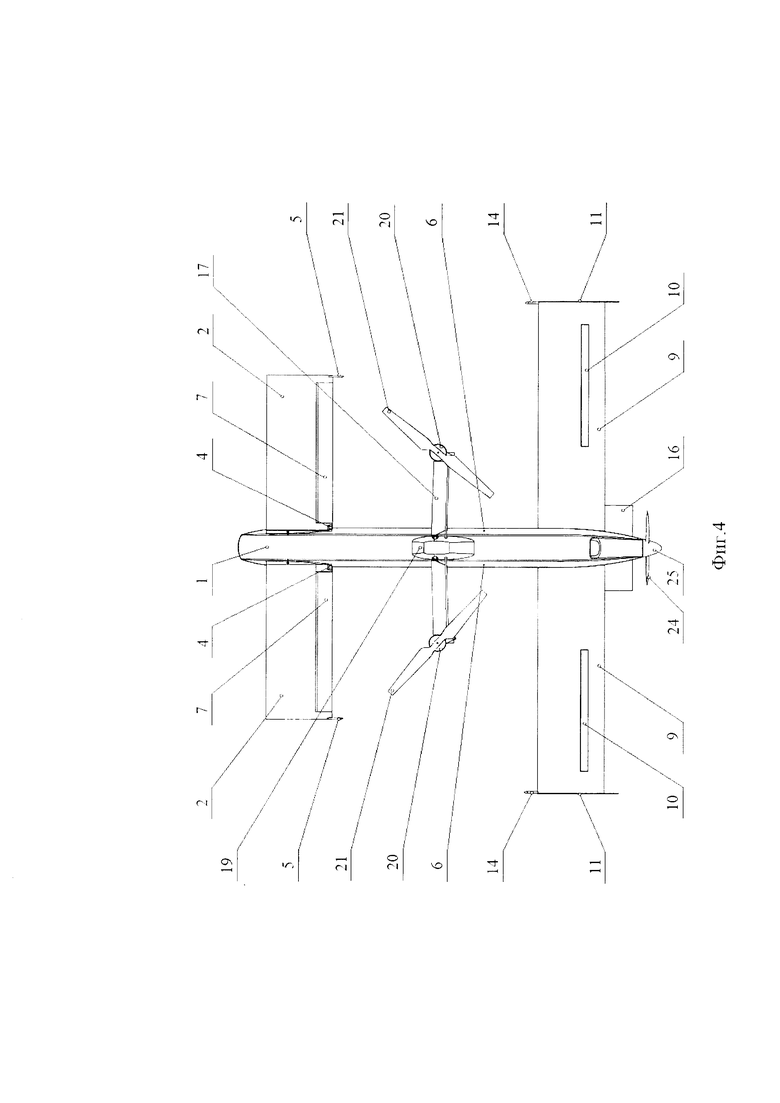
Фиг. 4 - вид БПЛА сверху.
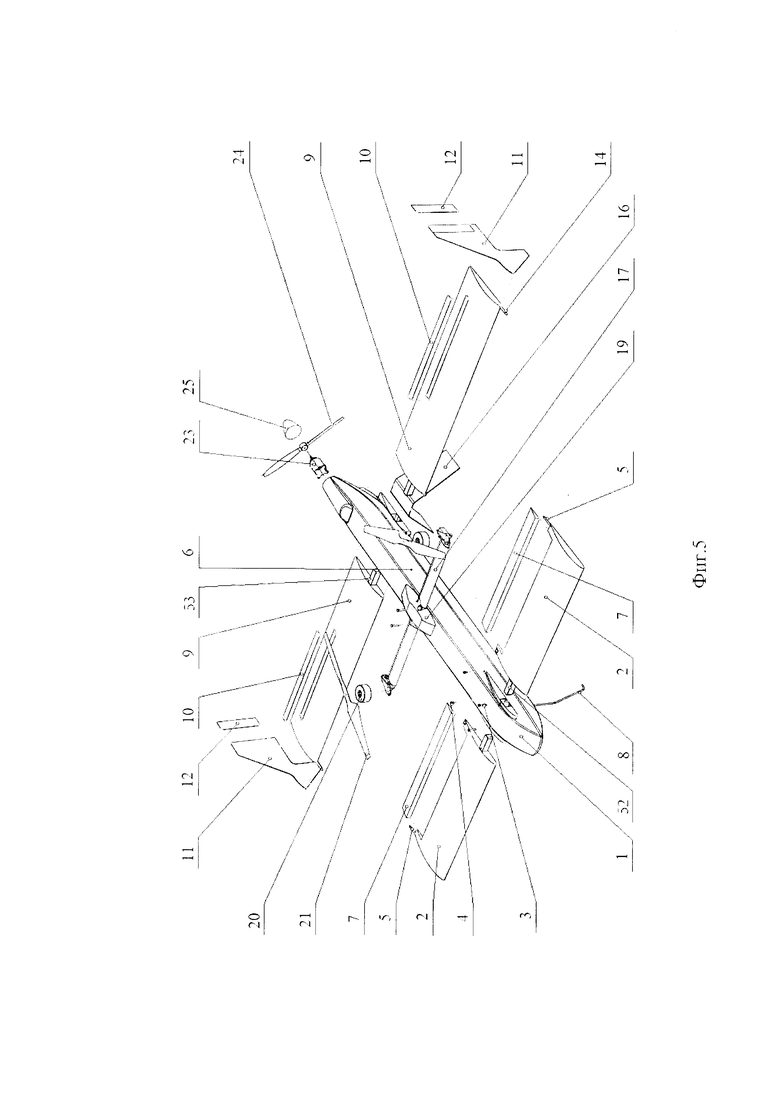
Фиг. 5 - разбивка по деталям БПЛА.
Фиг. 6 - вид БПЛА в сложенной конфигурации.
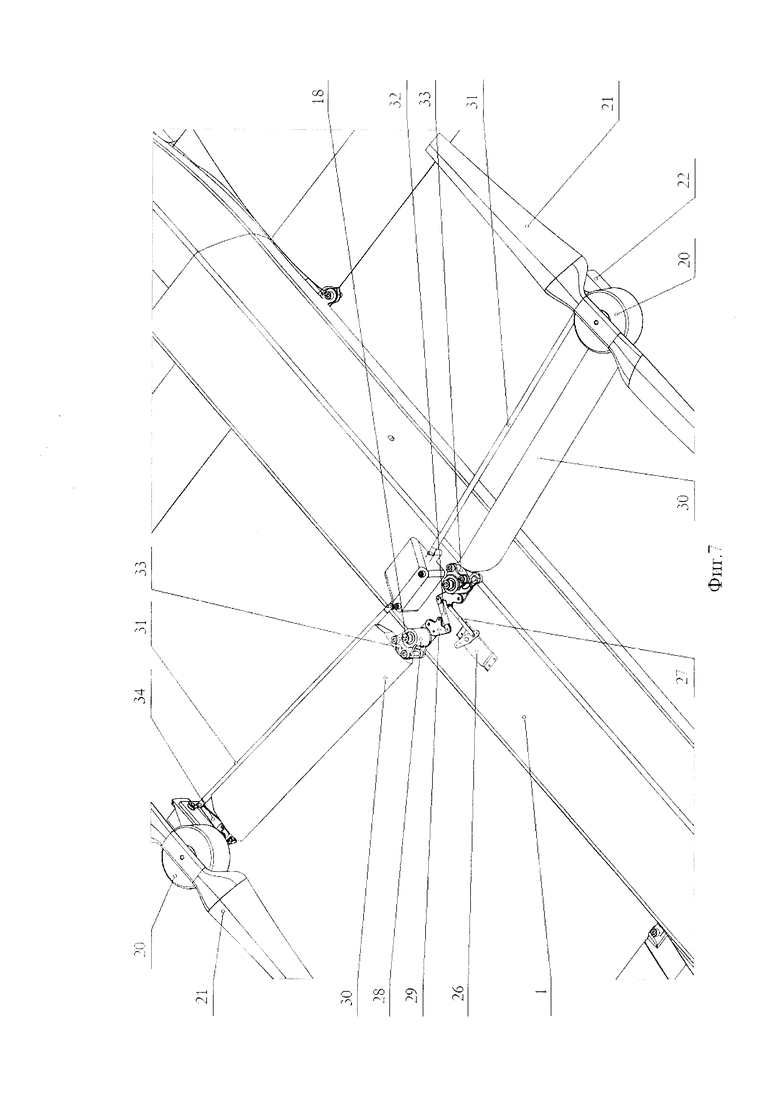
Фиг. 7 - механизм управления смещением пилонов ПСУ.
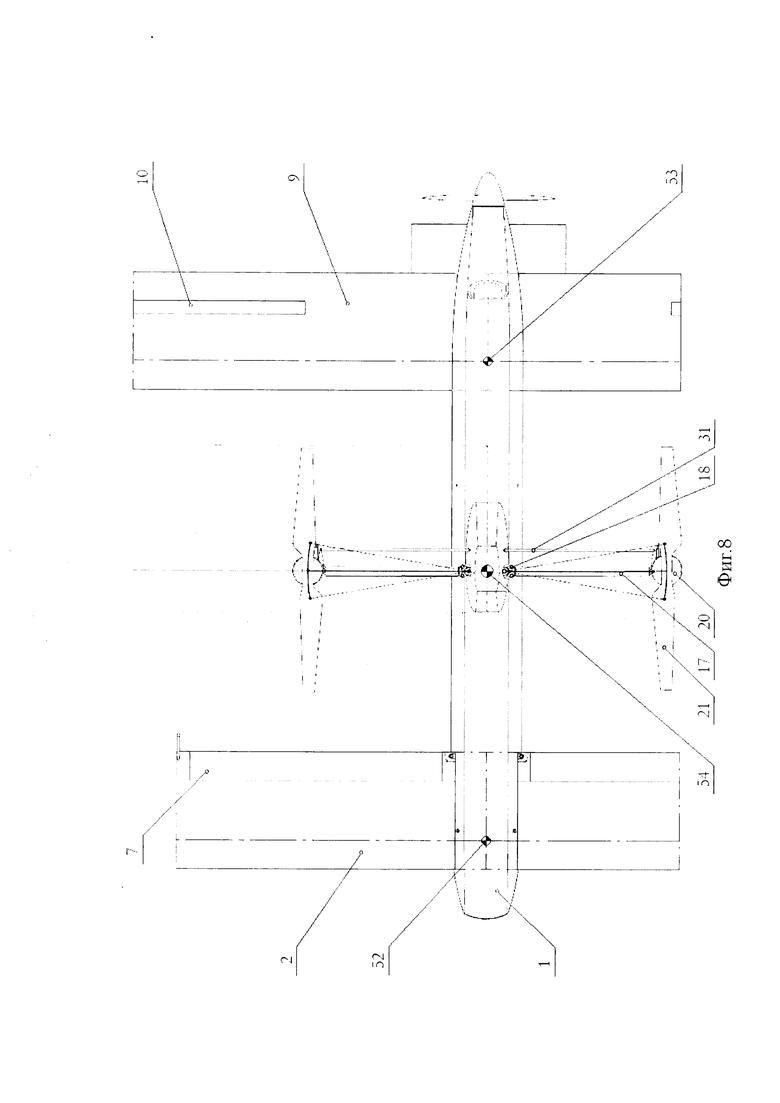
Фиг. 8 - схема балансировки БПЛА.
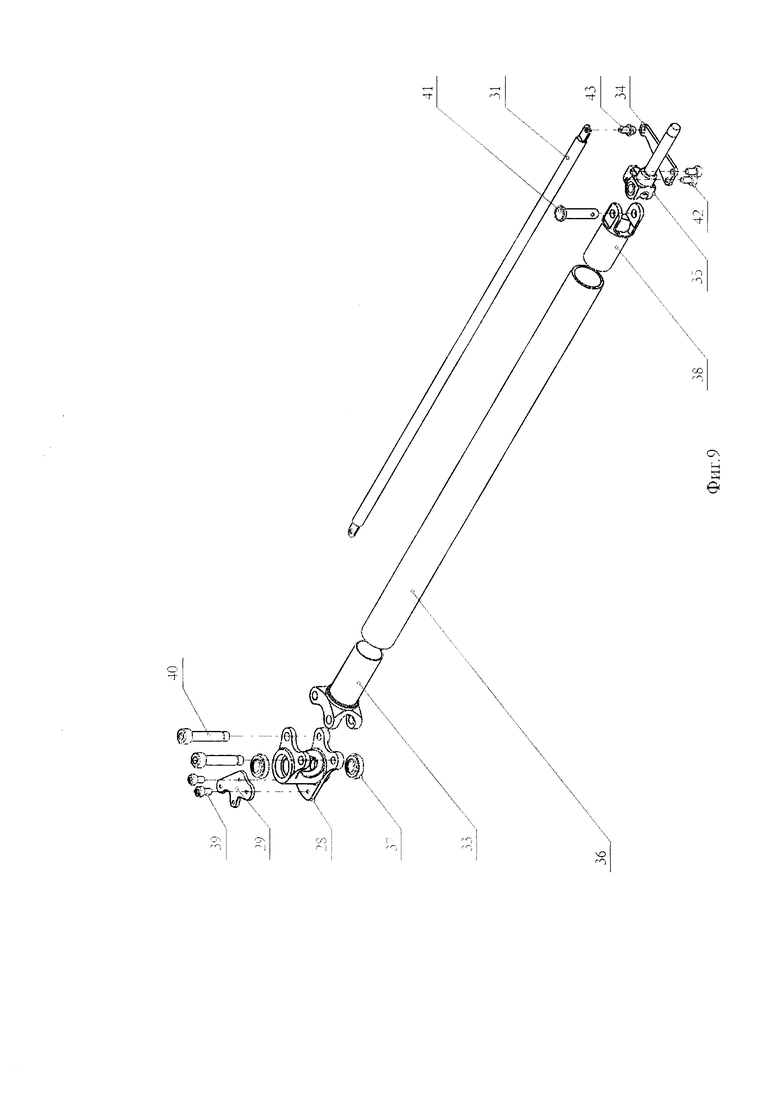
Фиг. 9 - разбивка по деталям пилона ПСУ.
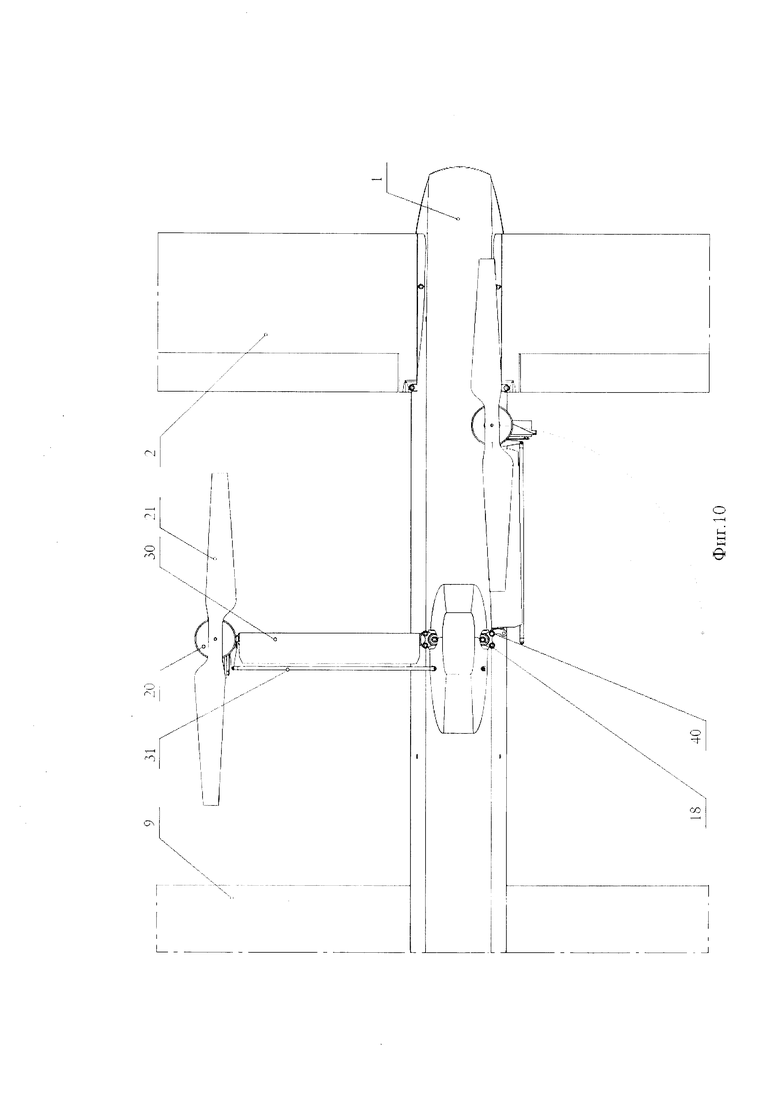
Фиг. 10 - схема складывания пилона ПСУ.
На фигурах обозначены следующие элементы:
1 - фюзеляж.
2 - консоль складного переднего горизонтального оперения (ПГО).
3 - фиксирующий винт консоли ПГО.
4 - осевой винт складывания консоли ПГО.
5 - штырь фиксации консоли ПГО в сложенном состоянии.
6 - гнездо штыря фиксации консоли ПГО на фюзеляже.
7 - руль высоты.
8 - носовая опора посадочного устройства.
9 - консоль крыла.
10 - интерцептор.
11 - концевая аэродинамическая поверхность (КАП).
12 - щиток.
13 - осевой винт складывания консоли крыла.
14 - штырь фиксации консоли крыла в сложенном состоянии.
15 - гнездо штыря фиксации консоли крыла на фюзеляже.
16 - посадочная рессора - дополнительное вертикальное оперение.
17 - отклоняемый пилон подъемной силовой установки (ПСУ).
18 - осевой винт отклонения пилона ПСУ.
19 - обтекатель отсека управления отклонениями пилонов ПСУ.
20 - электрический двигатель ПСУ.
21 - подъемный винт ПСУ.
22 - сервопривод отклонения двигателя ПСУ относительно полуоси шкворня.
23 - электрический двигатель (или ДВС) маршевой силовой установки (МСУ).
24 - толкающий воздушный винт МСУ.
25 - кок воздушного винта МСУ.
26 - сервопривод отклонения пилонов ПСУ.
27 - тяга отклонения пилонов.
28 - подшипниковый узел.
29 - рычаг отклонения пилонов.
30 - обтекатель пилона поворотный.
31 - тяга параллелограммная.
32 - тяга синхронизирующая отклонения пилонов.
33 - вилка пилона.
34 - рычаг шкворня.
35 - шкворень.
36 - карболовая трубка пилона.
37 - сферический подшипник.
38 - вилка крепления шкворня.
39 - винт крепления рычага отклонения пилона.
40 - винт крепления вилки пилона.
41 - палец крепления шкворня.
42 - вин т крепления рычага шкворня.
43 - шип рычага шкворня.
44. - замок фиксации консоли крыла.
45. - моторама двигателя ПСУ.
46. - верхняя панель фюзеляжа
47. - нижняя панель фюзеляжа.
48. - верхняя панель ПГО.
49. - нижняя панель ПГО.
50. - верхняя панель крыла.
51. - нижняя панель крыла.
52. - лонжерон консоли ПГО.
53. - лонжерон консоли крыла.
54. - фокус ПГО.
55. - фокус крыла.
56. - центр тяжести аппарата.
Изготовление БПЛА осуществляют следующим образом.
Сначала методом вакуумного формования изготавливают верхнюю стеклопластиковую сэндвич-панель 46 фюзеляжа 1 с гнездами 6 штыря фиксации 5 консоли ПГО, затем методом вакуумного формования изготавливают нижнюю стеклопластиковую сэндвич-панель 47 фюзеляжа 1 с гнездами 15 штыря фиксации 14 консоли крыла в сложенном состоянии. Панели соединяют между собой склейкой. Методом вакуумного формования изготавливают обтекатель 19 отсека управления отклонениями пилонов ПСУ.
Затем изготавливают консоли крыла 9, склеенные из отформованных вакуумированием в матрицах лонжеронов консоли крыла 53, нижней 51 и верхней 50 стеклопластиковых сэндвич-панелей крыла и штырей 14 фиксации консолей крыла в сложенном состоянии. На полученные консоли крыла 9 шарнирно навешивают интерцепторы 10, а к внешним торцам консоли прикручивают концевые аэродинамические поверхности 11 с навешенными на них щитками 12.
Далее изготавливают консоли ПГО 2, склеенные из отформованных вакуумированием в матрицах лонжеронов 52 консоли крыла, нижней 49 и верхней 48 стеклопластиковых сэндвич-панелей и штырей 5 фиксации консолей ПГО в сложенном состоянии. На полученные консоли ПГО 2 шарнирно навешивают рули высоты 7
На следующем этапе изготавливаю т узлы и детали подъемной силовой установки. Отклоняемые пилоны 17 ПСУ собирают из следующих компонентов: подшипниковых узлов 28, оснащенных сферическими подшипниками 37 и рычагами 29 отклонения пилонов, прикрученными с помощью винтов 39, вилок 33 пилонов, вклеенных в карболовые трубки 36 пилонов и прикрученных к подшипниковым узлам 28 с помощью винтов 40, вилок 38 крепления шкворня, вклеенных в карбоновые трубки 36 пилонов. На готовые пилоны нанизывают обтекатели пилонов поворотные 30. После этого, к вилкам 38 крепления шкворней с помощью пальцев 41 шарнирно пристыковываются шкворни 35, к которым винтами 42 прикручиваются рычаги 34 шкворня с шипами 43 рычага шкворня. На полуоси шкворней надвигаются моторамы 45 двигателя ПСУ, после чего на эти моторамы устанавливаются двигатели 20 ПСУ с подъемными винтами 21 ПСУ и сервоприводы 22 отклонения двигателей ПСУ. Собранные пилоны шарнирно закрепляют па верхней панели 46 фюзеляжа 1 с помощью осевых винтов 18, связывают пилоны между собой тягой синхронизирующей 32 отклонения пилонов, а с сервоприводом 26 отклонения пилонов - тягой 27 отклонения пилонов, после чего устанавливают обтекатель 19 отсека управления отклонениями пилонов ПСУ. Тяги параллелограммные 31 одним концом надевают на шипы 43 рычага шкворня, а вторым - на шипы на обтекателе 19 отсека управления отклонениями пилонов ПСУ.
Маршевую силовую установку, состоящую из электрического двигателя 23 (или ДВС), толкающего воздушного винта 24 и кока воздушного винта 25 устанавливают в хвостовой части фюзеляжа.
Посадочное устройство состоит из носовой опоры 8, изготовленной из стального прутка и посадочной рессоры 16, выполняющей так же функцию дополнительного вертикального оперения.
Носовую опору 8 монтируют в нижней передней части фюзеляжа 1, а рессору 16 прикручивают винтами к нижней задней части фюзеляжа 1.
После этого фюзеляж 1 опирают па посадочное устройство и с помощью осевых винтов складывания 4 и фиксирующих винтов 3 пристыковывают консоли ПГО, затем с помощью осевых винтов складывания 13 и фиксирующих замков 44 пристыковывают консоли крыла.
Работа БПЛА осуществляется следующим образом.
С пульта управления подается команда на вертикальный взлет посредством включения двух двигатель 20 ПСУ. Подъемные винты 21 создают подъемную силу, которая отрывает аппарат от земли и поднимает вверх на высоту 7…10 метров. Во время подъема автоматическая система управления парирует внешние возмущающие факторы и изменения центровки по каналу тангажа путем зеркального и параллелограммного смещения вперед-назад двигателей 20 подъемных силовых установок посредством отклоняемых пилонов 17 с прикрепленными к ним параллелограммными тягами и отклонением векторов подъемной силы СУ вперед-назад относительно поперечной оси. Внешние возмущающие факторы и изменения центровки по каналу крена парируются дифференциальным регулированием оборотов двигателей 20 левой и правой подъемных СУ. Внешние возмущающие факторы по каналу рысканья парируются отклонением векторов подъемной силы в разные стороны относительно поперечной оси, при этом боковые проекции векторов подъемных сил отсутствуют, благодаря принципу параллелограммного смещения подъемных силовых установок.
При достижении указанной высоты, по команде системы управления автоматически включается маршевый двигатель 23, который разгоняет самолет в горизонтальном направлении. По мере разгона аппарата нарастает аэродинамическая подъемная сила крыла и автоматически снижаются обороты, а, следовательно, и подъемная сила, создаваемая подъемными винтами 21. При достижении скорости движения самолета в 65% от его крейсерской, подъемные двигатели 20 выключаются, подъемные винты 21 останавливаются и позиционируются вдоль набегающего потока воздуха, создавая минимальное аэродинамическое сопротивление. В горизонтальном полете аппарат управляется системой автоматического управления, которая осуществляет стабилизацию самолета но всем трем угловым координатам и высоте полета, а также его движение по программной траектории.
Для увеличения продольной устойчивости аппарата в горизонтальном полете изменяют его центровку, путем смещения масс неработающих ПСУ вперед в продольном направлении, используя отклонение пилонов. Для улучшения маневренности аппарата в горизонтальном полете изменяют его центровку, путем смещения масс неработающих ПСУ назад в продольном направлении, используя отклонение пилонов.
При подлете к зоне посадки маршевый двигатель 23 отключается, скорость и аэродинамическая подъемная сила снижаются. Чтобы уравновесить силу веса аппарата включаются в работу подъемные винты 21, тяга которых плавно нарастает по мере снижения подъемной силы крыла. При полной потере горизонтальной скорости аппарата сила веса уравновешивается суммарной подъемной силой винтов 21. Далее все маневры аппарата, в том числе и вертикальная посадка, осуществляются аналогично управлению во время подъема.
После приземления подъемные двигатели 20 отключаются, винты 21 останавливаются
Таким образом, использование предлагаемого изобретения обеспечивает следующий технический результат:
1. Упрощение конструкции благодаря использованию всего двух двигателей ПСУ и сопутствующего оборудования.
2. Увеличение надежности БПЛА при снижении сложности конструкции и механизмов аппарата.
3. Улучшение устойчивости БПЛА на режиме взлета-посадки с двумя подъемными СУ.
4. Однозначность работы и упрощение системы управления БПЛА, благодаря использованию параллелограммного принципа смещения ПСУ в горизонтальной плоскости, при котором не возникает боковых неуравновешенных проекций векторов подъемных сил ПСУ.
5. Возможность изменения характеристик устойчивости и управляемости аппарата в горизонтальном полете изменением центровки, путем смещения масс неработающих ПСУ вперед-назад в продольном направлении при максимальном отклонении пилонов на угол +/-15 градусов.
6. Возможность компенсации изменения центровки на режиме взлета-посадки после сброса полезной нагрузки в пределах 8-42% СЛХ эквивалентного крыла, при отклонении пилонов на угол +/-10 град.
7. Минимальное торможение потока воздуха от подъемных винтов на режиме взлета-посадки и уменьшение аэродинамического сопротивления пилонов СУ, благодаря использованию свободно вращающихся обтекателей пилонов ПСУ.
8. Использование элемента посадочного устройства в улучшении путевой устойчивости ЛА в горизонтальном полете.
9. Уменьшение транспортных габаритов складыванием ПГО, консолей крыла и пилонов ПСУ без полной разборки БПЛА.
| название | год | авторы | номер документа |
|---|---|---|---|
| БПЛА из унифицированных деталей и узлов, изготовленных методом литья под давлением, и способ его изготовления | 2023 |
|
RU2814641C1 |
| БПЛА из унифицированных деталей и узлов и способ его изготовления | 2023 |
|
RU2812011C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2015 |
|
RU2606216C1 |
| БЕСПИЛОТНЫЙ ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2009 |
|
RU2409504C1 |
| МНОГОЦЕЛЕВОЙ КРИОГЕННЫЙ КОНВЕРТОПЛАН | 2009 |
|
RU2394723C1 |
| Беспилотный летательный аппарат вертикального взлёта и посадки и способ его изготовления | 2023 |
|
RU2819460C1 |
| КРИОГЕННЫЙ ТУРБОЭЛЕКТРИЧЕСКИЙ САМОЛЕТ КОРОТКОГО ВЗЛЕТА И ПОСАДКИ | 2013 |
|
RU2534676C1 |
| АВИАЦИОННЫЙ РАКЕТНЫЙ КОМПЛЕКС С БЕСПИЛОТНЫМ УДАРНЫМ ВЕРТОЛЕТОМ-САМОЛЕТОМ | 2017 |
|
RU2674742C1 |
| ЛЕТАТЕЛЬНЫЙ АППАРАТ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ И/ИЛИ С ВЕРТИКАЛЬНЫМ ВЗЛЕТОМ И ПОСАДКОЙ С УКОРОЧЕННЫМ ПРОБЕГОМ | 2021 |
|
RU2764311C1 |
| БЕСПИЛОТНЫЙ СКОРОСТНОЙ ВЕРТОЛЕТ, ДЕСАНТИРУЕМЫЙ С САМОЛЕТА-НОСИТЕЛЯ | 2016 |
|
RU2627975C2 |
Изобретение относится к области авиации, в частности к конструкциям летательных аппаратов вертикального взлета и посадки. Беспилотный летательный аппарат (БПЛА) включает фюзеляж с неподвижным крылом и передним горизонтальным оперением, подъемную силовую установку, маршевую силовую установку, средства управления по курсу, посадочное устройство. Фюзеляж состоит из верхней и нижней стеклопластиковых сэндвич-панелей, отсека управления отклонениями пилонов. Крыло состоит из двух консолей, склеенных из нижней и верхней стеклопластиковых сэндвич-панелей, лонжеронов консолей крыла, штырей фиксации консолей крыла в сложенном состоянии, а также концевых аэродинамических поверхностей с прикрепленными к ним шарнирно-курсовыми щитками, двух интерцепторов. Подъемная силовая установка состоят из двух оснащенных подъемными винтами электродвигателей, закрепленных на моторамах, оборудованных сервоприводами управления поворотом подъемной силовой установки вокруг поперечных полуосей шкворней. Маршевая силовая установка состоит из электрического двигателя или двигателя внутреннего сгорания, толкающего воздушного винта. Обеспечивается повышение надежности БПЛА, улучшение устойчивости аппарата на режиме взлета-посадки, достижение упрощения и однозначности работы системы управления БПЛА. 2 н. и 6 з.п. ф-лы, 10 ил.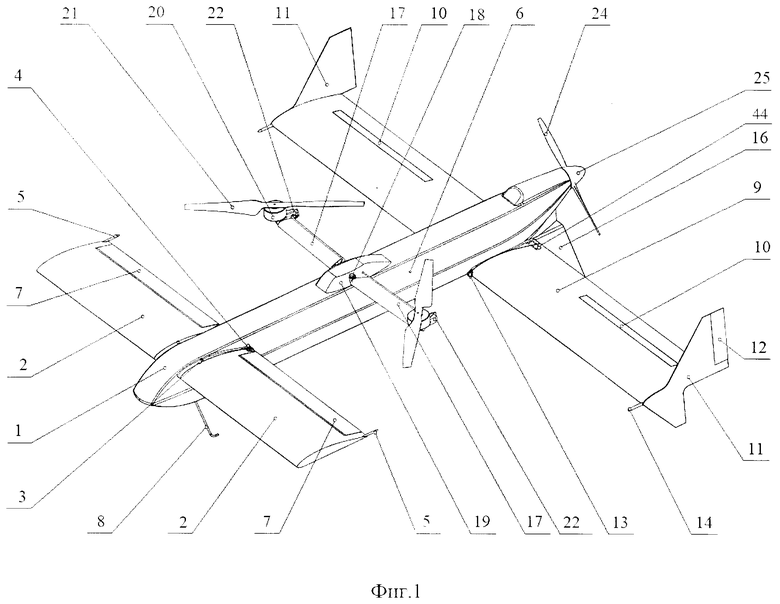
1. Беспилотный летательный аппарат (БПЛА), включающий фюзеляж с неподвижным крылом и передним горизонтальным оперением, подъемную силовую установку, маршевую силовую установку, средства управления по курсу, посадочное устройство, отличающийся тем, что фюзеляж состоит из верхней и нижней стеклопластиковых сэндвич-панелей, отсека управления отклонениями пилонов; крыло состоит из двух консолей, склеенных из нижней и верхней стеклопластиковых сэндвич-панелей, лонжеронов консолей крыла, штырей фиксации консолей крыла в сложенном состоянии, а также концевых аэродинамических поверхностей с прикрепленными к ним шарнирно-курсовыми щитками, двух интерцепторов, шарнирно закрепленных на верхних панелях; переднее горизонтальное оперение состоит из двух консолей, склеенных из нижней и верхней стеклопластиковых сэндвич-панелей, штырей фиксации консолей переднего горизонтального оперения в сложенном состоянии и двух рулей высоты, шарнирно прикрепленных к нижним панелям в вырезах консолей переднего горизонтального оперениях; подъемные силовые установки состоят из двух оснащенных подъемными винтами электродвигателей, закрепленных на моторамах, оборудованных сервоприводами управления поворотом подъемной силовой установки вокруг поперечных полуосей шкворней, двух вилок крепления шкворней, двух карбоновых трубок пилонов, двух вилок пилонов, двух подшипниковых узлов с подшипниками, рычагов отклонения пилонов, сервопривода отклонения пилонов, тяги отклонения пилонов, тяги, синхронизирующей отклонения пилонов, двух рычагов шкворня, двух тяг параллелограммных, крепежных и осевых винтов, двух обтекателей пилонов поворотных; маршевая силовая установка, состоит из электрического двигателя или двигателя внутреннего сгорания, толкающего воздушного винта, кока воздушного винта; посадочное устройство состоит из носовой опоры и посадочной рессоры, максимально удаленной назад от центра тяжести аппарата и имеющей большую площадь поверхности, что обеспечивает функцию дополнительного вертикального оперения.
2. БПЛА по п. 1, отличающийся тем, что для управления по курсу на концевых аэродинамических поверхностях крыла установлены щитки, отклоняемые наружу попеременно.
3. БПЛА по п. 1, отличающийся тем, что поворотные обтекатели пилонов силовой установки свободно вращаются па трубках пилонов от набегающего потока воздуха, что в режиме взлета обеспечивает уменьшение экранирования подъемных винтов БПЛА, а в режиме горизонтального полета снижает силу аэродинамического сопротивления пилонов подъемной силовой установки.
4. БПЛА по п.1, отличающийся тем, что подъемные силовые установки вместе с пилонами выполнены с возможностью поворота вперед вокруг передних винтов крепления вилки пилона и складывания вдоль фюзеляжа.
5. БПЛА по п.1, отличающийся тем, что консоли крыла выполнены с возможностью поворота вперед вокруг осевых винтов, складывания вдоль фюзеляжа, фиксации штырями в гнездах.
6. БПЛА по п.1, отличающийся тем, что консоли переднего горизонтального оперения выполнены с возможностью поворота назад вокруг осевых винтов, складывания вдоль фюзеляжа, фиксации штырями в гнездах.
7. Способ управления БПЛА по каналу тангажа, включающий перемещение посредством сервопривода подъемных силовых установок вперед-назад, отклонение векторов подъемной силы подъемной силовой установки, отличающийся тем, что перемещения подъемной силовой установки вперед-назад сервоприводом производят параллельно горизонтальной плоскости БПЛА посредством отклоняемых пилонов с параллелограммными тягами, а отклонение векторов подъемной силы подъемной силовой установки как в одном, так и в противоположном направлениях осуществляют относительно поперечной оси аппарата сервоприводами управления поворотом подъемной силовой установки вокруг поперечных полуосей шкворней, закрепленными на моторамах.
8. Способ управления БПЛА по п. 7, отличающийся тем, что смещение масс неработающих подъемных силовых установок вперед-назад в продольном направлении осуществляют путем отклонения пилонов с обеспечением изменения характеристик устойчивости и управляемости аппарата в горизонтальном полете ввиду изменения центровки БПЛА.
| МЕХАНИЗМ ПОЗИЦИОНИРОВАНИЯ ФЮЗЕЛЯЖА (ВАРИАНТЫ), ЛЕТАТЕЛЬНЫЙ АППАРАТ И СПОСОБ БАЛАНСИРОВКИ ЛЕТАТЕЛЬНОГО АППАРАТА (ВАРИАНТЫ) | 2018 |
|
RU2695754C1 |
| ВЫПОЛНЕННЫЙ С ВОЗМОЖНОСТЬЮ ВЕРТИКАЛЬНОГО ВЗЛЕТА ЛЕТАТЕЛЬНЫЙ АППАРАТ | 2014 |
|
RU2670356C2 |
| RU 2000250 C1, 07.09.1993 | |||
| US 20210271267 A1, 02.09.2021 | |||
| БПЛА из унифицированных деталей и узлов, изготовленных методом литья под давлением, и способ его изготовления | 2023 |
|
RU2814641C1 |
| Летательный аппарат вертикального взлета и посадки | 2018 |
|
RU2700154C1 |
| Конвертоплан | 2019 |
|
RU2723516C1 |

