Изобретение относится к области точного приборостроения, в частности к приборам измерения параметров движения летательных аппаратов, и может быть использовано при изготовлении маятниковых компенсационных акселерометров, имеющих магнитоэлектрические датчики момента.
Известен маятниковый акселерометр на упругом кварцевом подвесе (1), который состоит из двух металлических пластин и одной, находящейся между ними кварцевой пластины в форме диска с незамкнутой кольцевой прорезью. Перемычки между диском и кольцевой опорой выполнены также из кварца и являются упругими элементами пружинного подвеса. Для создания зазора между подвижной и неподвижной частями чувствительного элемента акселерометра на центральной кварцевой пластине на ее кольцевой поверхности имеются три выступа (платика) с каждой стороны, обращенной к неподвижным пластинам высотой порядка 20 мкм. Акселерометр имеет магнитоэлектрический датчик момента, катушки которого расположены на подвижной части (маятнике), а магниты с магнитопроводами и полюсными наконечниками расположены на неподвижной части.
Недостатком такого акселерометра является сильная зависимость величины масштабного коэффициента от температуры, т.к. индукция в рабочем зазоре меняется с изменением температуры.
Известен маятниковый акселерометр на упругом кварцевом подвесе (2), устройство которого аналогично устройству (1). При этом в устройство (2) в магнитную систему введен воздушный зазор между основным магнитопроводом из инвара (36Н) и вставкой из пермаллоя (50Н), которая крепится к торцу магнита. С другого торца к магниту крепится полюсный наконечник. На эту сборку одевается титановая втулка и приклеивается к цилиндрической части магнита, а по внешнему диаметру втулка вклеивается в основную магнитную систему. В рабочем зазоре, образуемом магнитопроводом и полюсным наконечником, помещается катушка датчика момента, крепящаяся на маятнике. При изменении окружающей температуры (например, при ее увеличении) индукция магнита падает, но от увеличения температуры размер вставки увеличивается больше, чем внутренний диаметр основной магнитной системы из-за разности коэффициентов линейного расширения (к.л.р.) материалов магнитной системы и вставки, и введенный воздушный зазор уменьшается, что уменьшает магнитное сопротивление цепи. Уменьшение этого сопротивления компенсирует уменьшение индукции собственно магнита, и индукция в рабочем зазоре стремится остаться прежней. Однако из-за того, что магнит имеет большое количество клееных соединений (к.л.р. клея ˜60×10-61/°С), полностью скомпенсировать уменьшение индукции от температуры не удается (компенсация носит нелинейный характер).
Целью настоящего изобретения является повышение точности акселерометра за счет существенного сокращения клеевых соединений магнита с арматурой магнитной системы.
Указанная цель достигается тем, что магниты отделены воздушными зазорами от полюсных наконечников и вставок, а крепление цилиндрических поверхностей магнитов ко втулкам ограничено по площади.
Конструкция предлагаемого акселерометра приведена на чертеже.
Акселерометр содержит подвижную пластину-маятник 1 на упругом подвесе 2. На маятнике закреплены катушки 3 датчика момента, а на неподвижной части - магниты 4 и полюсные наконечники 5. При этом магниты 4 и полюсные наконечники 5 прикреплены к внутренним поверхностям титановых втулок 6. К внешнему диаметру каждой из втулок 6 прикреплены вставки 7 из магнитного материала, обладающего большим к.л.р., чем у магнитопровода 8. С другой стороны по внешнему диаметру втулки 6 прикреплены к магнитопроводам 8. Крепление вышеуказанных деталей обычно производится с помощью клея. На чертеже места креплений 9 обозначены темными линиями. Таким образом, видно, что магниты 4 имеют воздушные зазоры как между полюсными наконечниками 5, так и между вставками 7. Сами же магниты 4 крепятся к втулкам 6 по ограниченной площади (˜20% цилиндрической поверхности магнита).
Акселерометр работает следующим образом.
При действии ускорения вдоль оси Х-Х маятник 1 отклоняется от своего среднего положения. Это отклонение фиксируется дифференциальным емкостным датчиком положения, образованным поверхностями с металлическим напылением с двух сторон, расположенными на маятнике 1, и ответными поверхностями, обращенными к маятнику 1 и расположенными на магнитопроводах 8. Сигнал с датчика положения подается на усилитель обратной связи (не показан), который усиливает и преобразует данный сигнал, и подает его в катушки 3. Ток, протекая по катушкам 3, образует магнитное поле, которое взаимодействует с магнитным полем постоянных магнитов 4. Возникающая при этом сила компенсирует инерционную силу маятника 1 и последний возвращается в среднее положение. По величине тока, протекающего по катушкам 4, судят о величине ускорения, действующего на акселерометр.
Предлагаемое выполнение магнитной системы акселерометра освобождает от напряжений, возникавших ранее в клеевых соединениях в местах между полюсными наконечниками 5 и магнитами 4 и между магнитами 4 и вставками 7. Реализация такого решения позволит получить стабильность случайной составляющей масштабного коэффициента на уровне (1-2)×10-5 вместо имеющихся сейчас 5×10-3 у акселерометров с традиционной магнитной системой.
Источники информации
1. Патент США №3702073, кл. 73-512, 1972 г. - аналог.
2. А.с. №207315, МКИ G01P 15/08, 1983 г. - прототип.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСЕЛЕРОМЕТР | 2010 |
|
RU2441247C1 |
| АКСЕЛЕРОМЕТР | 2010 |
|
RU2485524C2 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2559154C2 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2005 |
|
RU2291450C1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ | 2002 |
|
RU2218575C2 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 1999 |
|
RU2155964C1 |
| АКСЕЛЕРОМЕТР | 1990 |
|
RU2063047C1 |
| Датчик моментов акселерометра компенсационного | 2021 |
|
RU2776595C1 |
| АКСЕЛЕРОМЕТР | 2010 |
|
RU2441246C1 |
| АКСЕЛЕРОМЕТР | 1985 |
|
SU1760861A1 |
Изобретение относится к области точного приборостроения, в частности к приборам измерения параметров движения летательных аппаратов, и может быть использовано при изготовлении маятниковых компенсационных акселерометров, имеющих магнитоэлектрические датчики момента. Акселерометр содержит центральную кварцевую пластину 1 на упругом подвесе 2. На маятнике закреплены катушки 3 датчика момента, а на неподвижной части - магниты 4 и полюсные наконечники 5. При этом магниты 4 и полюсные наконечники 5 прикреплены к внутренним поверхностям титановых втулок 6. К внешнему диаметру каждой из втулок 6 прикреплены вставки 7 из магнитного материала, обладающего большим коэффициентом линейного расширения, чем у магнитопровода 8. С другой стороны по внешнему диаметру втулки 6 прикреплены к магнитопроводам 8. Крепление вышеуказанных деталей обычно производится с помощью клея. Таким образом, магниты 4 имеют воздушные зазоры как между полюсными наконечниками 5, так и между вставками 7. Сами же магниты 4 крепятся к втулкам 6 по ограниченной площади. Существенное сокращение клеевых соединений магнита с арматурой магнитной системы обеспечивает повышение точности. 1 ил.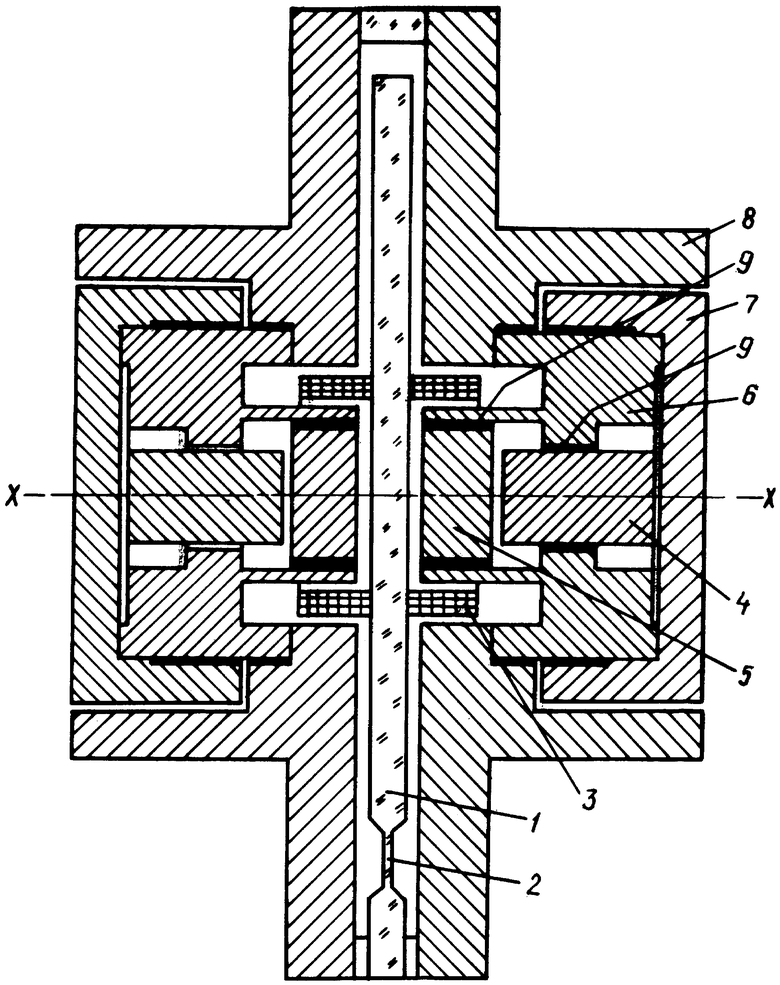
Акселерометр, содержащий подвижную часть, на которой расположены катушки датчика момента, подвес подвижной части, расположенные на неподвижной части магниты, прикрепленные цилиндрическими поверхностями к внутренним поверхностям титановых втулок, к внешним диаметрам которых прикреплены вставки из магнитного материала с большим коэффициентом линейного расширения, с другой стороны по внешнему диаметру втулки прикреплены к магнитопроводам, а также полюсные наконечники и дифференциальный емкостной датчик положения, образованный поверхностями с металлическим напылением с двух сторон, расположенными на подвижной части, и ответными поверхностями, обращенными к подвижной части и расположенными на магнитопроводах, отличающийся тем, что магниты отделены воздушными зазорами от полюсных наконечников и вставок, полюсные наконечники прикреплены к внутренним поверхностям титановых втулок, а крепление цилиндрических поверхностей магнитов ограничено по площади и составляет около 20% цилиндрической поверхности магнита.
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 1999 |
|
RU2155964C1 |
| АКСЕЛЕРОМЕТР | 1990 |
|
RU2063047C1 |
| Датчик линейных ускорений | 1986 |
|
SU1392512A2 |
| US 3702073 A, 07.11.1972 | |||
| JP 11281670 А, 15.10.1999. | |||

