Изобретение относится к приборостроению, в частности к системам измерения параметров движения подвижных объектов, и может быть использовано в приборах, измеряющих ускорение объектов.
Наиболее близким к изобретению по технической сущности и достигаемому эффекту является одноосный маятниковый акселерометр компенсационного типа, состоящий из корпуса, подвижной пластины-маятника на упругом подвесе, преобразователя перемещений, в состав которого входят датчик угла емкостного типа и усилитель, и узла силовой компенсации, состоящего из двух катушек, установленных на подвижной пластине, и двух магнитных систем. Обмотки катушек размещены в кольцевом зазоре, в котором формируется магнитный поток. Каждая магнитная система узла силовой компенсации состоит из магнита, магнитопровода, полюсного наконечника и устройства, предназначенного для компенсации изменения индукции в рабочем зазоре вследствие изменения температуры. Рабочий магнитный поток формируется в радиальном зазоре между полюсным наконечником и магнитопроводом. Компенсация изменения индукции осуществлена благодаря использованию в конструкции магнитных систем термошунтов из термомагнитного материала. Недостатком этого устройства является то, что магнитные свойства материалов типа Ni-Cu существенно зависят от технологии изготовления и режима термообработки; сплавы Ni-Cu очень чувствительны к изменению содержания никеля (изменение содержания никеля на 0,25% изменяет температуру точки Кюри на 10оС), а при охлаждении шунта до критической температуры возникает опасность внутриструктурных превращений и связанного с этим необратимого ухудшения термомагнитных свойств. Вследствие этого затруднено изготовление термомагнитных шунтов с необходимой степенью компенсации. Кроме того, каждый собираемый прибор индивидуален с точки зрения величины температурной нестабильности индукции магнитных систем. Регулировка же степени компенсации в конструкции прототипа невозможна. Поэтому разработка магнитной системы, инвариантной по отношению к температуре, невозможна.
В конструкции прототипа не предусмотрено устройство, позволяющее производить компенсацию температурной нестабильности механического момента тяжения. Невозможность полной компенсации температурной нестабильности индукции в рабочем зазоре и температурной нестабильности механического момента тяжения приводит к тому, что выходной сигнал прибора будет зависеть от температуры.
Целью изобретения является повышение точности прибора.
Указанная цель достигается тем, что в акселерометр введены установленные на магнитопроводах магнитных систем последовательно соединенные между собой термочувствительные катушки, соединенные электрически параллельно с катушками датчика силы, и установленный на корпусе калибровочный резистор, также соединенный электрически параллельно с катушками датчика силы, при этом электросопротивление калибровочного резистора выбирается по формуле
r0 =  , где ro - электросопротивление калибровочного резистора при номинальной температуре;
, где ro - электросопротивление калибровочного резистора при номинальной температуре;
αв- температурный коэффициент индукции магнитной системы;
Ктм - температурный коэффициент механического тяжения;
R - электросопротивление катушек датчика силы при номинальной температуре;
- электросопротивление катушек датчика силы при номинальной температуре;
R - электросопротивление двух последовательно соединенных термочувствительных катушек;
- электросопротивление двух последовательно соединенных термочувствительных катушек;
α- температурный коэффициент электросопротивления материала калибровочного резистора;
α2- температурный коэффициент электросопротивления материала катушек датчика силы;
α1- температурный коэффициент электросопротивления материала термочувствительных катушек.
При изменении температуры окружающей среды меняется индукция в рабочем зазоре датчика силы и механическое тяжение упругого подвеса. Как известно, изменение момента механического тяжения эквивалентно по величине изменению маятниковости. Изменение индукции в рабочем зазоре и изменение маятниковости пластины приводят к изменению тока компенсации. Выходной сигнал прибора пропорционален току компенсации. Следовательно, изменение температуры окружающей среды приводит к изменению тока компенсации. Выходной сигнал прибора пропорционален току компенсации. Следовательно, изменение температуры окружающей среды приводит к изменению выходного сигнала прибора.
На фиг. 1 изображен чувствительный элемент акселерометра; на фиг.2 - электрическая схема.
Центральная пластина-маятник 1 установлена между двумя неподвижными платами 2 с зазором. На центральной пластине-маятнике 1 установлены катушки двух датчиков силы 3, нанесены обкладки емкостного датчика угла 4. Неподвижные платы 2 также выполняют функции магнитопроводов датчиков силы.
Датчики силы состоят из плат 2, полюсных наконечников 5 и постоянных магнитов 6.
На платах 2 установлены соединенные последовательно термочувствительные катушки 7. Выводы катушек 7 подключены параллельно к катушкам датчиков силы 3.
Пакет, состоящий из пластины-маятника 1 и двух неподвижных плат 2, установлен в корпусе 8 через промежуточное кольцо 9 и герметично закрыт крышкой 10.
Калибровочный резистор 11 для простоты регулировки (подбора) установлен с наружной стороны корпуса 8. Резистор 11 подключен параллельно катушкам датчиков силы 3.
Термочувствительная катушка выполнена из материала, температурный коэффициент электросопротивления которого больше температурного коэффициента электросопротивления материала катушки датчика силы. Поэтому в данной схеме при температурных флуктуациях будет происходить перераспределение токов, протекающих через обмотку датчика силы и термочувствительную катушку. Например, увеличение тока в катушке датчика силы, обусловленное уменьшением индукции в рабочем зазоре при увеличении температуры и увеличением маятниковости (из-за механического момента тяжения), будет скомпенсировано за счет уменьшения тока, протекающего через термочувствительную катушку. Аналогичная компенсация будет происходить при уменьшении температуры окружающей среды.
Точный расчет температурного коэффициента индукции магнитной системы и температурного коэффициента тяжения невозможен. Вследствие этого без регулировки невозможно обеспечить выполнение оптимального соотношения между параметрами цепи компенсации, магнитной системы и тяжением. В связи с этим в конструкцию введен калибровочный резистор, позволяющий производить эту регулировку в собранном приборе.
При определенном соотношении между сопротивлением катушки датчика силы, сопротивлением калибровочного резистора, их температурными коэффициентами электросопротивления, температурным коэффициентом индукции магнитной системы и температурным коэффициентом механического тяжения упругого подвеса выходной сигнал прибора не будет зависеть от изменения температуры.
Условие инвариантности выходного сигнала прибора от температуры можно получить следующим образом (задача решается в линейной постановке):
Fo = Bo I l, (1) где Fo - инерционная сила, действующая на маятник;
l, (1) где Fo - инерционная сила, действующая на маятник;
Во - индукция в рабочем зазоре магнитной системы при номинальной температуре tн;
I - ток компенсации, протекающий через катушку датчика силы при номинальной температуре tн;
- ток компенсации, протекающий через катушку датчика силы при номинальной температуре tн;
l - длина провода катушки.
Изменение длины провода катушки не учитывается, так как коэффициент линейного расширения материала провода в 10 - 15 раз меньше температурного коэффициента индукции магнитной системы.
F = Bo (1 + αвΔt) Iкl; (2)
F = Fo (1 + Kтм Δt), (3) где Δt - изменение температуры окружающей среды;
Ктм - температурный коэффициент тяжения упругого подвеса;
αв- температурный коэффициент индукции магнитной системы датчика силы;
Iк - ток компенсации, протекающий через катушки датчика силы при температуре tн + Δt. Из формул (1), (2) и (3) следует
BoI l(1+KтмΔt) = BoIкl(1+αвΔt); (4)
l(1+KтмΔt) = BoIкl(1+αвΔt); (4)
Iк=  ; (5)
; (5)
U = R
= R (1+α2Δt)
(1+α2Δt)  , (6) где U
, (6) где U - падение напряжения на сопротивлении катушки датчика силы при t = tн + Δt;
- падение напряжения на сопротивлении катушки датчика силы при t = tн + Δt;
R - электросопротивление катушки датчика силы при номинальной температуре;
- электросопротивление катушки датчика силы при номинальной температуре;
α2- температурный коэффициент электросопротивления материала катушки датчика силы.
I =
=  , (7) где I
, (7) где I - ток, протекающий через термочувствительную катушку при t = tн+ Δt;
- ток, протекающий через термочувствительную катушку при t = tн+ Δt;
R - электросопротивление термочувствительной катушки при номинальной температуре;
- электросопротивление термочувствительной катушки при номинальной температуре;
α1- температурный коэффициент электросопротивления материала термочувствительной катушки.
I =
=  ; (8)
; (8)
Ir=  , (9) где Ir - ток, протекающий через калибровочный резистор при t = tн + Δt;
, (9) где Ir - ток, протекающий через калибровочный резистор при t = tн + Δt;
ro - сопротивление термостабильного резистора при номинальной температуре;
α- температурный коэффициент электросопротивления материала калибровочного резистора.
На основании формул (3), (8) и (9) можно записать
I = 
 1+
1+  +
+  ,
,
(10) где I - ток, протекающий через эталонный резистор при t = tн + Δt.
Разложим выражение (10) для тока в ряд Тейлора в окрестности точки Δt = 0.
I = IΔt=0+  Δt +
Δt +  Δt2+ ...
Δt2+ ...
Задача решается в линейной постановке, т.е. приращения тока I, пропорциональные Δt2, Δt3, Δtн..., не учитываются вследствие малости производных =
=  ×
×
×  1+
1+  +
+  +
+
+  -
-
-  +
+
+  ,
,
При  = 0 имеем
= 0 имеем I
I Kтм-I
Kтм-I 1+
1+  +
+  +
+
+ I +
+
+  ≅ 0;
≅ 0;
αв-Kтм=  ;
;
(11)
r0=  .
.
(12)
Температурный коэффициент индукции и температурный коэффициент механического тяжения индивидуальны для каждого прибора.
Из анализа выражения (11) следует, что от величины калибровочного резистора зависит степень компенсации нестабильности выходного сигнала прибора, вызванной изменением температуры окружающей среды. Благодаря тому, что калибровочный резистор установлен с наружной стороны прибора, в каждом конкретном случае подбором величины калибровочного резистоpа, можно устранить зависимость выходного сигнала прибора от температуры (в собранном приборе). Подбор величины калибровочного резистора производится при рабочей температуре прибора. Предварительно величину электросопротивления калибровочного резистора целесообразно определять по формуле (12). Вместо величины αв- Ктм используется величина αв, где αв- температурный коэффициент индукции материала магнита.
Затем по величине температурного коэффициента выходного сигнала производится уточнение величины калибровочного резистора. Например, при α= 4 . 10-4 1/оС R = 30 Ом; R
= 30 Ом; R = 600 Ом; α1= 0,007 1/оС; α2= 0,0039 1/оС; αв- Ктм = 10-4 1/оС получаем ro = 3000 Ом.
= 600 Ом; α1= 0,007 1/оС; α2= 0,0039 1/оС; αв- Ктм = 10-4 1/оС получаем ro = 3000 Ом.
После определения предварительной величины ro производится точный подбор величины резистора ro по температурному коэффициенту выходного сигнала прибора. После точного подбора практически достигается выполнение равенства (11).
Прибор работает следующим образом. При движении объекта с ускорением в направлении оси чувствительности прибора подвижная пластина-маятник 1 отклоняется относительно неподвижных металлических плат 2, установленных на корпусе 8. Отклонение регистрируется датчиком угла 4 емкостного типа и после усиления сигнал поступает в узел силовой компенсации, состоящий из двух катушек датчика силы 3 и двух магнитных систем, состоящих из наконечников 5 и магнитов 6. Узел силовой компенсации развивает силу, равную инерционной силе. Причем выходной сигнал прибора будет пропорционален кажущемуся ускорению объекта в направлении оси чувствительности прибора, так как при изменении температуры будет происходить перераспределение токов, протекающих через обмотку датчика силы 3, термочувствительные катушки 7 и калибровочный резистор 11. Причем параметры цепи компенсации, магнитной системы подобраны таким образом, что сумма токов, протекающих через обмотку датчика силы, термочувствительные катушки и калибровочный резистор не будет зависеть от температуры, т.е.
I = Iк + I + IR ≠f (Δt), где I - выходной сигнал прибора.
+ IR ≠f (Δt), где I - выходной сигнал прибора.
Повышение точности и стабильности достигнуто за счет введения в конструкцию базового акселерометра вместо термомагнитных шатунов термочувствительных катушек и калибровочного резистора, соединенных электрически параллельно с катушками датчика силы.
| название | год | авторы | номер документа |
|---|---|---|---|
| АКСЕЛЕРОМЕТР | 1991 |
|
SU1825139A1 |
| АКСЕЛЕРОМЕТР | 1990 |
|
RU2063047C1 |
| МАГНИТОЭЛЕКТРИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ СИЛЫ | 2003 |
|
RU2242011C2 |
| ДАТЧИК МАГНИТНОГО ПОЛЯ | 1993 |
|
RU2084912C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1994 |
|
RU2126161C1 |
| ГРАВИМЕТР | 1996 |
|
RU2096813C1 |
| СПОСОБ ТЕМПЕРАТУРНОЙ КОМПЕНСАЦИИ ТЕНЗОРЕЗИСТОРНЫХ ДАТЧИКОВ | 1984 |
|
RU2027142C1 |
| АКСЕЛЕРОМЕТР | 1990 |
|
SU1825138A1 |
| Весы с электромагнитным уравновешиванием | 1984 |
|
SU1216658A1 |
| СПОСОБ ТЕРМОСТАТИРОВАНИЯ ПРЕОБРАЗОВАТЕЛЯ ХОЛЛА | 1994 |
|
RU2073877C1 |
Изобретение относится к приборостроению и может быть использовано в приборах, измеряющих ускорение объектов. Целью изобретения является повышение точности акселерометра. Указанная цель достигается тем, что на магнитопроводах магнитных систем установлены последовательно соединенные термочувствительные катушки 7, соединенные электрически параллельно с катушками датчика силы 3. На корпусе установлен калибровочный резистор 11, соединенный электрически параллельно с катушками датчика силы 3, сопротивление которого выбирается из расчетной зависимости. 2 ил.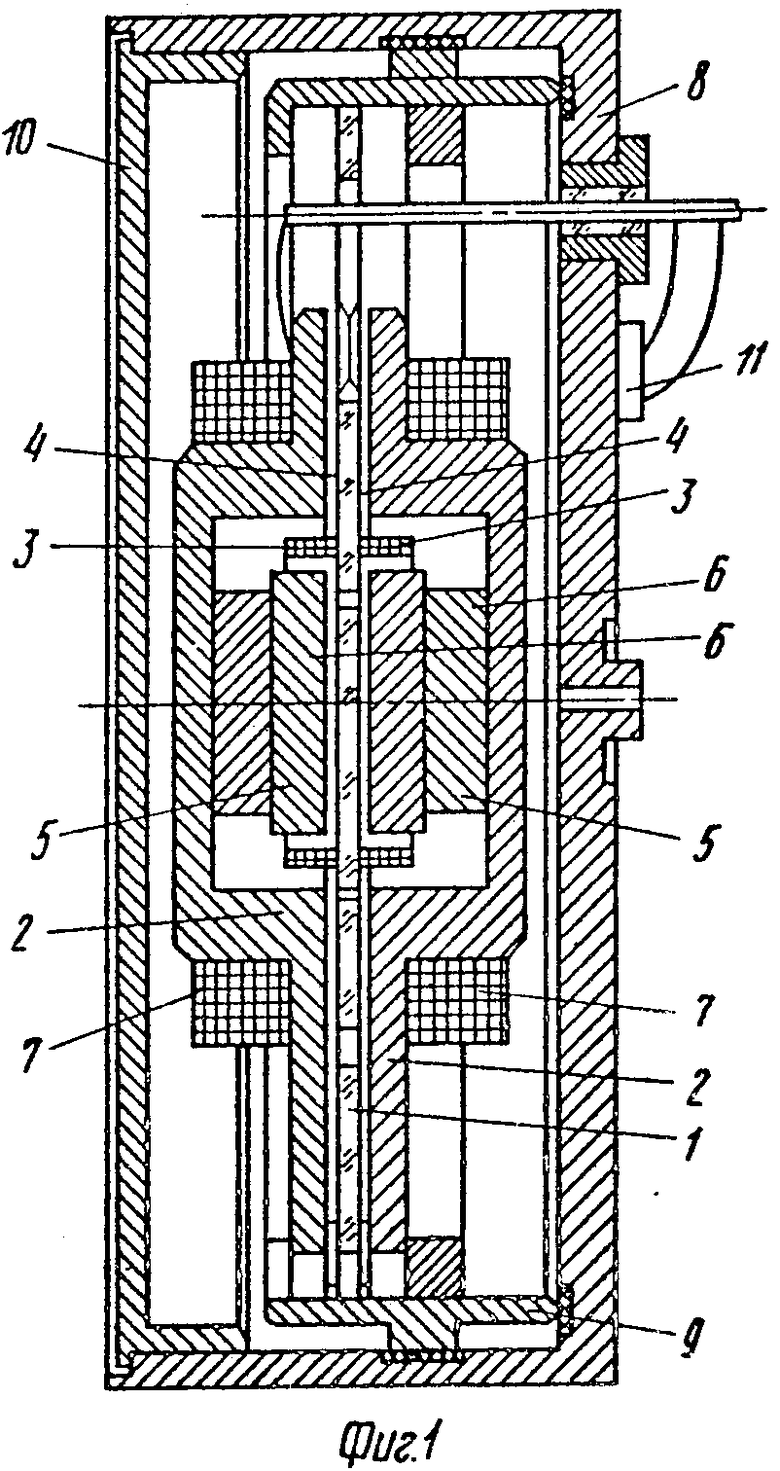
АКСЕЛЕРОМЕТР, содержащий корпус, подвижную пластину-маятник на упругом подвесе, преобразователь перемещений и узел силовой компенсации, включающий два магнитопровода с постоянными магнитами и две катушки, установленные на подвижной пластине, отличающийся тем, что, с целью повышения точности, в него дополнительно введены установленные на магнитопроводах магнитных систем последовательно соединенные между собой термочувствительные катушки, электрически подключенные параллельно к катушкам датчика силы, и установленный на корпусе калибровочный резистор, электрически подключенный параллельно к катушкам датчика силы, при этом электросопротивление калибровочного резистора выбирается по формуле
ro=  ,
,
где r0 - электросопротивление калибровочного резистора при номинальной температуре;
αв - температурный коэффициент индукции магнитной системы;
Kтм - температурный коэффициент механического тяжения;
R - электросопротивление катушек датчика силы при номинальной температуре;
- электросопротивление катушек датчика силы при номинальной температуре;
R - электросопротивление двух последовательно соединенных термочувствительных катушек;
- электросопротивление двух последовательно соединенных термочувствительных катушек;
α - температурный коэффициент электросопротивления материала калибровочного резистора;
α2 - температурный коэффициент электросопротивления материала катушек датчика силы;
α1 - температурный коэффициент электросопротивления материала термочувствительных катушек.
| Патент США N 3789672, кл | |||
| Способ подготовки рафинадного сахара к высушиванию | 0 |
|
SU73A1 |
