Изобретение относится к измерительной технике и может быть применено для создания управляющих (противодействующих) моментов в системах тина электрической пружины, например, в акселерометрах компенсационного типа.
Известен аналог (патент РФ №2291450. Компенсационный маятниковый акселерометр / Бахратов А. Р., Егорова Т.Л., Игнатов А. С. и др. Опубл. 10.01.2007, Бюл. №1), в котором для создания противодействующего момента применен датчик момента магнитоэлектрического типа. Компенсационный маятниковый акселерометр содержит магнитоэлектрический датчик момента, содержащий две магнитные системы, соосно размещенные по обе стороны от маятникового узла. Первая и вторая магнитные системы содержат каждая: постоянный магнит, кольцевой ферромагнитный магнитопровод и центральный ферромагнитный магнитопровод. Элементы магнитных систем образуют между собой кольцевые зазоры, в которых размещаются также две катушки, закрепленные с обеих сторон маятникового пластинчатого чувствительного элемента.
Недостатком аналога является сложная конструкция, которая в предполагаемых габаритах не имеет резервов для увеличения крутизны датчика моментов и, следовательно, расширения диапазона измерения.
Известен компенсационный акселерометр, датчик момента которого принят за прототип (патент РФ №2028000. Компенсационный маятниковый акселерометр / Баженов В.И., Брищук Е.С., Вдовенко И.В. и др. опубликовано 27.01.1995). Акселерометр имеет корпус со стойкой и посадочными отверстиями во фланце корпуса, который закрыт крышкой. На стойке установлена пластина из монокристаллического кремния, имеющая внутреннюю неподвижную часть и внешнюю подвижную часть, которые соединены между собой двумя упругими перемычками. Магнитоэлектрический датчик момента (силовой преобразователь) акселерометра состоит из установленного на стойке дискового постоянного магнита с диаметральным направлением намагниченности, компенсационной катушки, установленной на подвижной части кремниевой пластины, магнитопровода, образованного корпусом и крышкой, которые изготовлены из магнитомягкого магнитного материала. С компенсационной катушкой также жестко связаны маятниковые грузы.
Установленные на стойке магнит, переходные платы, неподвижная часть кремниевой пластины закрепляются с помощью гайки, навинчиваемой на резьбовую концевую часть стойки.
Недостатком датчика моментов прототипа является заниженная крутизна моментной характеристики, что обусловлено диаметральной намагниченностью дискового постоянного магнита, что приводит к неравномерности магнитной индукции в зазоре магнитопровода, где размещена компенсационная катушка. При этом магнитная индукция в зазоре магнитопровода изменяется от нуля в магнитной нейтрале, до максимального значения в районе полюсов магнита. Заниженная крутизна в свою очередь приводит к снижению диапазона измерения акселерометра.
Технический результат, на достижение которого направлено заявляемое изобретение, заключается в повышении эффективности работы датчика моментов акселерометра компенсационного, что приводит к расширению диапазона измерения ускорений акселерометра.
Технический результат достигается тем, что в датчике момента акселерометра компенсационного, содержащим маятник в одноосном упругом кристаллическом подвесе, имеющий неподвижную, жестко связанную с корпусом и подвижную кристаллические пластины, соединенные упругими перемычками, при этом на подвижной пластине установлен каркас с кольцевой катушкой, магнитную систему, включающую постоянный магнит и магнитопровод, которые закреплены на корпусе, новым является то, что магнит магнитной системы имеет два секторных цилиндрических магнита прямоугольного сечения, размещенных симметрично относительно оси подвеса и намагниченных по радиусу таким образом, что для первого магнита кольцевая катушка проходит над северным (южным) полюсом, а для второго магнита проходит над южным (северным) полюсом, магнитопровод также состоит из двух частей, имеющих П-образную конфигурацию, при этом в первом магнитопроводе установлен первый магнит, во втором магнитопроводе установлен второй магнит таким образом, чтобы магнитная индукция в зазоре, где размещена кольцевая катушка, была равномерной, а угловые размеры секторных магнитов и соответственно магнитопроводов равны  , где
, где  угол между плоскостью, проходящей через ось подвеса упругих перемычек и плоскостью, которая определяет угловой размер секторных магнитов.
угол между плоскостью, проходящей через ось подвеса упругих перемычек и плоскостью, которая определяет угловой размер секторных магнитов.
Сущность изобретения поясняется фиг. 1–3, где:
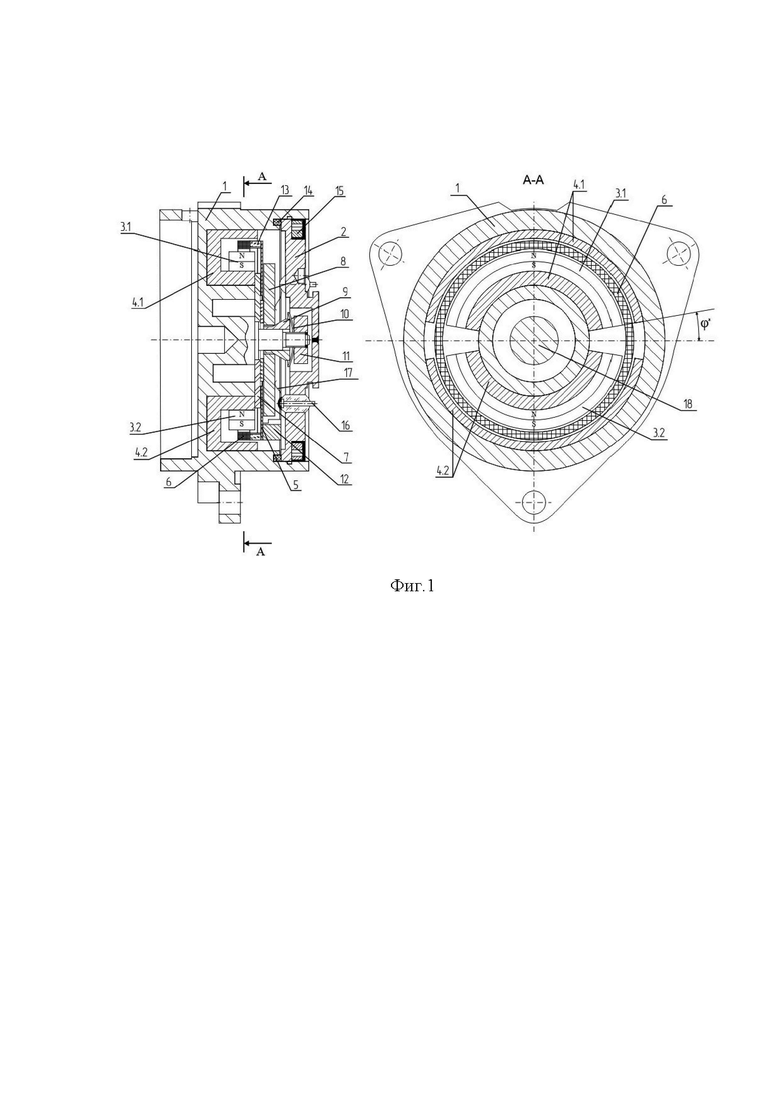
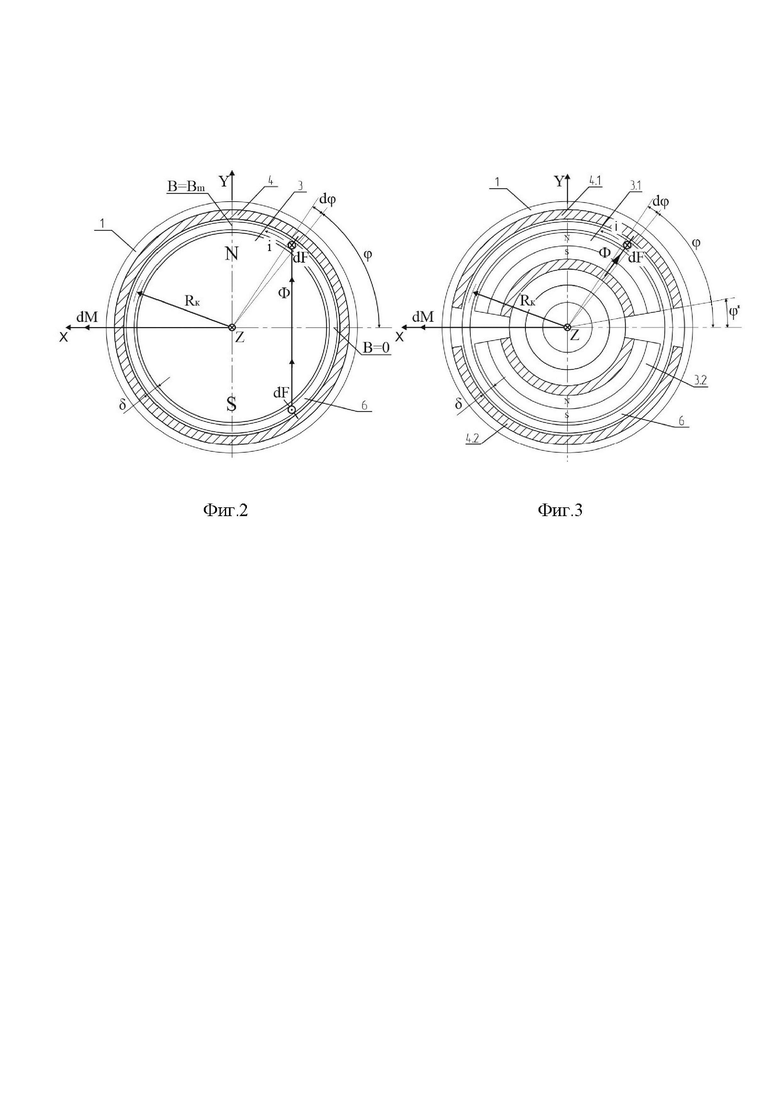
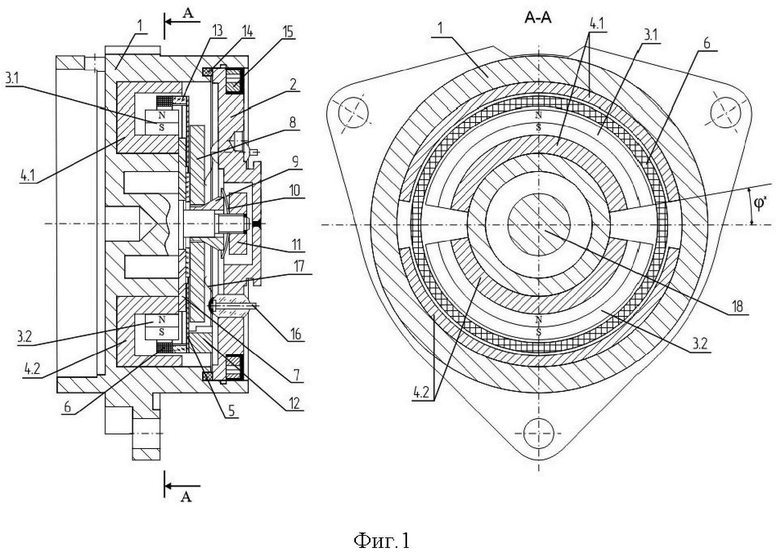
на фиг. 1 приведен эскиз конструкции датчика момента акселерометра компенсационного, на фиг. 2 – расчетная схема для определения крутизны датчика момента по току для прототипа, на фиг. 3 – расчетная схема для определения крутизны датчика момента по току предполагаемого изобретения
На фиг. 1-3 приняты следующие обозначения:
1 – корпус;
2 – крышка;
3 – дисковый магнит, примененный в прототипе (фиг. 2);
3.1 – первый постоянный магнит, намагниченный по радиусу;
3.2 – второй постоянный магнит, намагниченный по радиусу;
4 – магнитопровод, примененный в прототипе (фиг. 2);
4.1 – первый магнитопровод;
4.2 – второй магнитопровод;
5 – подвижная часть кристаллической пластины;
6 – катушка кольцевая;
7 – переходная плата;
8 – комбинированная плата;
9 – втулка коническая;
10 – шайба пружинная;
11 – гайка;
12 – маятниковый грузик;
13 – каркас крепления катушки 6 к пластине 5;
14 – резиновая прокладка для герметизации;
15 – гайка для крепления крышки к корпусу;
16 – гермоввод (6 штук);
17 – упругая контактная пружина (жестко связана с гермовводом);
18 – стойка (является элементом корпуса).
На фиг. 1-3 приняты следующие буквенные обозначения:
 – средний радиус катушки;
– средний радиус катушки;
Ф – линия магнитного потока;
В – магнитная индуция в зазоре;
 – ток в катушке;
– ток в катушке;
 – элементарная длина витка катушки;
– элементарная длина витка катушки;
 – элементарная сила;
– элементарная сила;
 – элементарный момент;
– элементарный момент;
 – угловое положение элемента витка;
– угловое положение элемента витка;
 – элементарный угол, соответствуюий элементу витка ;
– элементарный угол, соответствуюий элементу витка ;
 – угол, определяющий угловой размер секторных магнитов;
– угол, определяющий угловой размер секторных магнитов;
 – величина зазора между магнитом и магнитопроводом.
– величина зазора между магнитом и магнитопроводом.
В соответствии с эскизом конструкции акселерометра компенсационного, представленным на фиг. 1, датчик моментов имеет магнитную систему, состоящую из двух П-образных в сечении магнитопроводов 4.1 и 4.2, вмонтированных в корпус 1, выполненный из немагнитной стали. Два цилиндрических секторных магнита 3.1 и 3.2, намагниченных по радиусу, жестко закреплены в соответствующих магнитопроводах 4.1 и 4.2, при этом первый магнит 3.1 обращен в сторону зазора северным (южным) полюсом, а второй магнит 3.2 обращен в сторону зазора южным (северным) полюсом. В зазоре на каркасе 13 размещена кольцевая катушка 6. Оба магнита имеют форму сектора-кольца с угловой мерой, равной  . Таким образом, кольцевая катушка будет иметь активную часть, равную
. Таким образом, кольцевая катушка будет иметь активную часть, равную  в отличие от катушки прототипа, у которой активная часть равна
в отличие от катушки прототипа, у которой активная часть равна  . Катушка 6 соединяется с подвижной частью кристаллической пластины 5 с помощью каркаса 13, к которому крепится маятниковый грузик 12. Неподвижная часть кристаллической пластины 5 жестко соединена со стойкой 18 корпуса 1 через переходную плату 7 – посажена на его цилиндрическую часть и прижата комбинированной платой 8 с помощью конической втулки 9, пружинной шайбы 10 и гайки 11. Переходная плата 7 предназначена для демпфирования чувствительного элемента (подвижной части пластины 5 с маятником 12) во время вибрации.
. Катушка 6 соединяется с подвижной частью кристаллической пластины 5 с помощью каркаса 13, к которому крепится маятниковый грузик 12. Неподвижная часть кристаллической пластины 5 жестко соединена со стойкой 18 корпуса 1 через переходную плату 7 – посажена на его цилиндрическую часть и прижата комбинированной платой 8 с помощью конической втулки 9, пружинной шайбы 10 и гайки 11. Переходная плата 7 предназначена для демпфирования чувствительного элемента (подвижной части пластины 5 с маятником 12) во время вибрации.
Подвижная часть кристаллической пластины 5 и комбинированная плата 8, с нанесенной на нее металлизацией, образуют конденсаторы емкостного датчика угла, величина емкости которых изменяется в зависимости от положения, занимаемого подвижной частью кристаллической пластины 5 с маятником 12 относительно комбинированной платы 8.
Корпус 1 герметизируется крышкой 2 с помощью резиновой прокладки 14 и специальной гайки 15, которая заливается герметиком «Виксинт».
В крышке 2 имеется шесть гермовводов 16 с закрепленными на них контактами 17, с помощью которых осуществляется электрическая связь с подвижной частью пластины 5 и комбинированной платой 8.
Работа акселерометра компенсационного, в котором применен предлагаемый датчик моментов, хорошо описана в прототипе и состоит в следующем:
1) При действии ускорения  вдоль оси чувствительности Z (фиг. 2 и фиг. 3) возникает инерционный момент
вдоль оси чувствительности Z (фиг. 2 и фиг. 3) возникает инерционный момент  , действующий по оси X , который отклоняет подвижную часть пластины 5 с маятниковым грузом 12.
, действующий по оси X , который отклоняет подвижную часть пластины 5 с маятниковым грузом 12.
2) Под действием инерционного момента подвижная часть пластины 5 отклоняется и емкостной датчик угла выдает сигнал, который в усилителе проходит преобразование, усиливается по напряжению и мощности и подается на катушку кольцевую 6 датчика моментов.
3) Датчик моментов создает момент  , где
, где  – крутизна датчика моментов, определяемая его параметрами;
– крутизна датчика моментов, определяемая его параметрами;  – ток в катушке кольцевой 6.
– ток в катушке кольцевой 6.
4) В установившемся режиме измерения  , следовательно, ток в катушке кольцевой определяется соотношением
, следовательно, ток в катушке кольцевой определяется соотношением
 ,
,
из которого следует, что для повышения эффективности – увеличения диапазона измерения необходимо при прочих равных условиях увеличивать крутизну датчика моментов.
Для доказательства большей эффективности предлагаемого датчика момента необходимо показать, что при прочих равных условиях (габариты, ток в катушке, максимальная магнитная индукция в зазоре) крутизна предлагаемого датчика момента больше, чем крутизна датчика момента прототипа по току.
Определение суммарного момента датчика момента прототипа
Для этого в соответствии с расчетной схемой, приведенной на фиг. 2, определим суммарный момент датчика. Магнитная индукция в зазоре, создаваемая цилиндрическим магнитом, намагниченным по диаметру, уменьшается от  при
при  до
до  при
при  . Экспериментально установлено, что магнитная индукция в зазоре изменятся по закону, близкому к синусоидальному
. Экспериментально установлено, что магнитная индукция в зазоре изменятся по закону, близкому к синусоидальному  .
.
Элемент активной части витка катушки, по которой протекает ток  , равен:
, равен:
 .
.
В соответствии с законом Ампера запишем элементарную силу, действующую на элемент  для всех витков
для всех витков  катушки:
катушки:
 .
.
Определим величину элементарного момента, приложенного к элементу  всех витков
всех витков  катушки:
катушки:
 .
.
Проинтегрировав для всей активной части катушки, получим суммарный момент, создаваемый катушкой относительно оси подвеса маятника
Определение суммарного момента предлагаемого датчика момента
В соответствии с конфигурацией магнитной системы фиг. 3 магнитная индукция в зазоре постоянна (чтобы можно было корректно сравнивать два датчика момента).
Элемент активной части витка, как и в прототипе равен:
 .
.
Запишем элементарную силу:
 .
.
Определим величину элементарного момента:
 .
.
Проинтегрировав, получим суммарный момент, создаваемый катушкой относительно оси подвеса маятника:

Сравнивая крутизну датчиков моментов для двух вариантов, которая в выражениях моментов является произведениями соостветствующих коэффициентов при токе  , получим, что эффективность предлагаемой конструкции датчика момента эффективнее в N раз
, получим, что эффективность предлагаемой конструкции датчика момента эффективнее в N раз
 .
.
Угол  введен для исключения влияния первого и второго магнита друг на друга. Если принять, что
введен для исключения влияния первого и второго магнита друг на друга. Если принять, что  , то магниты будут разведены на угол
, то магниты будут разведены на угол  и этого вполне достаточно для исключения указанного влияния. При этом повышение эффективности будет в 1,25 раза, т.е. на 25%.
и этого вполне достаточно для исключения указанного влияния. При этом повышение эффективности будет в 1,25 раза, т.е. на 25%.
Предлагаемый датчик момента может найти применение при модернизации серийного акселерометра А-15, который выпускается Раменским приборостроительным заводом (РПЗ), а также при разработке новых акселерометров с расширенным диапазоном измерения.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2543708C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2005 |
|
RU2291450C1 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2039994C1 |
| АКСЕЛЕРОМЕТР | 2010 |
|
RU2485524C2 |
| АКСЕЛЕРОМЕТР | 2006 |
|
RU2313100C1 |
| АКСЕЛЕРОМЕТР | 1990 |
|
RU2063047C1 |
| АКСЕЛЕРОМЕТР | 2010 |
|
RU2441247C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 2013 |
|
RU2559154C2 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2028000C1 |
| АКСЕЛЕРОМЕТР | 1985 |
|
SU1760861A1 |
Изобретение относится к измерительной технике. Магнит магнитной системы датчика момента акселерометра компенсационного имеет два секторных цилиндрических магнита прямоугольного сечения, размещенных симметрично относительно оси подвеса и намагниченных по радиусу таким образом, что для первого магнита кольцевая катушка проходит над северным полюсом, а для второго магнита проходит над южным полюсом, магнитопровод также состоит из двух частей, имеющих П-образную конфигурацию, при этом в первом магнитопроводе установлен первый магнит, во втором магнитопроводе установлен второй магнит таким образом, чтобы магнитная индукция в зазоре, где размещена кольцевая катушка, была равномерной, а угловые размеры секторных магнитов и соответственно магнитопроводов равны 

Датчик момента акселерометра компенсационного, содержащий маятник в одноосном упругом кристаллическом подвесе, имеющий неподвижную, жестко связанную с корпусом, и подвижную кристаллические пластины, соединенные упругими перемычками, при этом на подвижной пластине установлен каркас с кольцевой катушкой, магнитную систему, включающую постоянный магнит и магнитопровод, которые закреплены на корпусе, отличающийся тем, что магнит магнитной системы имеет два секторных цилиндрических магнита прямоугольного сечения, размещенных симметрично относительно оси подвеса и намагниченных по радиусу таким образом, что для первого магнита кольцевая катушка проходит над северным полюсом, а для второго магнита проходит над южным полюсом, магнитопровод также состоит из двух частей, имеющих П-образную конфигурацию, при этом в первом магнитопроводе установлен первый магнит, во втором магнитопроводе установлен второй магнит таким образом, чтобы магнитная индукция в зазоре, где размещена кольцевая катушка, была равномерной, а угловые размеры секторных магнитов и соответственно магнитопроводов равны 

| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2028000C1 |
| КОМПЕНСАЦИОННЫЙ МАЯТНИКОВЫЙ АКСЕЛЕРОМЕТР | 1999 |
|
RU2155964C1 |
| АКСЕЛЕРОМЕТР | 2006 |
|
RU2313100C1 |
| US 2007204693 A1, 06.09.2007. | |||

