Данное предложение относится к области приборостроения и может быть использовано для построения изображения подстилающей поверхности с борта космического аппарата одновременно во множестве зон спектра оптического излучения при решении задач исследования природных ресурсов Земли, прогнозирования и анализа стихийных бедствий, разведки лесных пожаров, месторождений полезных ископаемых, оценки экологической обстановки в районах техногенных катастроф, создания городских кадастров.
Устройства для преобразования изображения подстилающей поверхности в видеосигнал в большом количестве узких спектральных диапазонов оптического излучения известны. Они могут быть выполнены в виде вакуумной или твердотельной телевизионной камеры со сменяемыми светофильтрами [1]. Количество светофильтров определяет количество используемых спектральных каналов. Это число, как правило, не превышает 6...10 светофильтров. Получение более тонкой спектральной структуры оптического изображения достигается введением в состав устройства диспергирующей системы в виде призмы или дифракционной решетки [2]. Примером построения такой системы является многоканальная сканирующая система "Фрагмент" [3], которая обеспечивает с борта космического аппарата при разрешении 80 метров преобразование и передачу 8 спектральных каналов видимой и ближней инфракрасной области спектра оптического излучения. Общей тенденцией совершенствования таких многоспектральных систем является увеличение числа выделяемых спектральных каналов при сохранении приемлемого пространственного разрешения на местности.
Увеличение спектрального разрешения позволяет производить комплексное распознавание элементов подстилающей поверхности. В современных многоспектральных системах спектральное разрешение доведено до величин порядка 0,001 нм, а общее число спектральных каналов составляет сотни, а в ряде случаев тысячи [4]. Такие многоспектральные устройства получили название видеоспектрометров. Примером отечественного видеоспектрометра является видеоспектрометр "Опал", разработанный в лаборатории "Косспектр" и установленный на борту космического аппарата "Марс-6". Функциональная схема видеоспектрометра аналогична схеме аппаратуры, использующей матричный приемник [5]. Устройство состоит из сканирующего зеркала, оптической системы, щелевой диафрагмы, диспергирующего элемента и матричного приемника излучения.
Сканирующее зеркало может быть неподвижным, если дистанционное зондирование ведется с больших высот, когда устройство имеет невысокое разрешение и требуемую полосу захвата обеспечивает матричный фотопреобразователь. В качестве диспергирующего элемента используются дифракционные решетки, обеспечивающие равномерную шкалу дискретизации по спектру, либо диспергирующие призмы, в которых ширина спектра уменьшается с длиной волны по линейному закону. Устройство [5] можно выбрать в качестве прототипа.
В известном устройстве входная щель располагается перпендикулярно направлению полета носителя, вырезая тем самым строку изображения подстилающей поверхности. Эта строка диспергирующим элементом разлагается в спектр, в результате чего получается кадр многоспектрального изображения. Полученный кадр считывается матричным фотопреобразователем. Фотопреобразователь представляет собой матрицу, состоящую из N×Q ячеек фотопреобразователей. Каждая i-ая  линейка соответствует i-ому спектральному диапазону оптического излучения. Каждая линейка фотопреобразователя состоит из Q светочувствительных ячеек. Количество Q и размер светочувствительной ячейки вдоль фотопреобразователя определяют разрешение на местности и полосу захвата устройства в целом. Каждая строка кадра соответствует изображению одной и той же узкой полосы сканируемой поверхности в определенной области спектра, то есть число спектральных поддиапазонов равно числу строк фотоматрицы. В аппаратуре "Опал" видимый участок спектра был разделен на 256 спектральных зон при разрешении на местности 35...50 метров. Кадровая развертка изображения осуществляется за счет естественного движения космического аппарата.
линейка соответствует i-ому спектральному диапазону оптического излучения. Каждая линейка фотопреобразователя состоит из Q светочувствительных ячеек. Количество Q и размер светочувствительной ячейки вдоль фотопреобразователя определяют разрешение на местности и полосу захвата устройства в целом. Каждая строка кадра соответствует изображению одной и той же узкой полосы сканируемой поверхности в определенной области спектра, то есть число спектральных поддиапазонов равно числу строк фотоматрицы. В аппаратуре "Опал" видимый участок спектра был разделен на 256 спектральных зон при разрешении на местности 35...50 метров. Кадровая развертка изображения осуществляется за счет естественного движения космического аппарата.
Такого разрешения на местности вполне достаточно для решения задач исследования площадных объектов наблюдения, например при оценке урожайности сельскохозяйственных культур, определении ледовой обстановки в зоне проводки морских караванов и др. Вместе с тем, такого разрешения не достаточно для решения целого ряда практических задач исследования точечных объектов наблюдения, например объектов инфраструктуры городов при создании кадастров; промышленных предприятий в задаче оценки экологической обстановки и безопасности и др. Улучшение разрешения на местности приводит к резкому ухудшению отношения сигнал/шум в каждом спектральном канале из-за необходимости применения длиннофокусной оптической системы, имеющей низкую светосилу. Поэтому блок передачи информации по каналу связи "Летательный аппарат - Земля" передает видеосигнал не всех каналов, а лишь тех, в которых отношение сигнал/шум превышает минимально допустимое значение. Это приводит к потере информации о подстилающей поверхности. В работе [6] показано, что для сигналов, заданных на конечных интервалах определения, равномерная дискретизация не является оптимальной. Для видеоспектрометров это означает, что интервалы дискретизации спектра должны быть неравномерными и определятся решаемой задачей, то есть спектральными характеристиками объектов наблюдения и фоновой обстановки. Следует особо отметить, что точечные объекты имеют, как правило, техногенную природу, то есть созданы руками человека, и поэтому их спектр излучения не содержит столько дополнительной информации, сколько содержит спектр природных образований (например, производственные корпуса любого завода выполнены из различных сортов бетона, имеющих примерно однотипные спектральные характеристики). Таким образом, при решении задач исследования природных ресурсов Земли для аппаратуры дистанционного зондирования требуется высокое спектральное разрешение при, возможно, некотором ухудшении пространственного разрешения; при решении задач наблюдения за техногенными объектами, наоборот, требуется высокое пространственное разрешение при, возможно, некотором ухудшении спектрального разрешения. Известные устройства для преобразования изображения подстилающей поверхности в видеосигнал имеют фиксированное пространственное и спектральное разрешение и предназначены для решения, как правило, только одной задачи: либо наблюдения за техногенными объектами, либо исследование природных ресурсов Земли.
Таким образом, недостаток известного устройства состоит в низкой эффективности одновременного решения задач исследования природных ресурсов Земли и наблюдения за техногенными объектами, то есть в низкой эффективности решения задач двойного назначения.
Цель данного предложения состоит в повышении эффективности решения задач двойного назначения, а именно в повышении эффективности решения задач исследования ресурсов Земли и наблюдения за техногенными объектами с помощью одного устройства.
Поставленная цель достигается тем, что в устройстве оптическая система выполнена в виде оптической системы с переменным фокусным расстоянием, изменение которого осуществляется от привода оптической системы с переменным фокусным расстоянием. Отечественная промышленность разработала оптические системы, допускающие более чем десятикратное изменение фокусного расстояния при его максимальном значении в единицы метров, что позволяет достигать требуемое для наблюдения за техногенными объектами разрешение на местности около метра в широком спектральном диапазоне [7]. Кроме того, в устройство дополнительно введено М групп ключей по N ключей в каждой. Сигнал с выхода i-ой линейки матрицы фотопреобразователей, соответствующей i-ому спектральному диапазону  где N - максимальное число спектральных каналов), одновременно поступает на вход i-го ключа в каждой j-ой
где N - максимальное число спектральных каналов), одновременно поступает на вход i-го ключа в каждой j-ой  группе ключей (М≤N). Выход каждого i-го ключа j-ой группы
группе ключей (М≤N). Выход каждого i-го ключа j-ой группы  подключен к i-ому входу j-го сумматора. Таким образом, каждый j-ый сумматор через ключ присоединен к выходу каждой из i-ой линеек фотопреобразователя. Управляющие входы ключей подключены к выходу блока управления. Блок управления управляет включением ключей. В результате на вход каждого сумматора может поступать сигнал с одного или нескольких (до N числа) спектральных каналов. Сумматоры суммируют спектральные каналы, управляя тем самым спектральным разрешением и повышая отношение сигнал/шум. Блок управления управляет приводом и работой всех ключей. Например, при решении задач техногенного характера по команде, поступающей из блока управления, увеличивается фокусное расстояние, но сокращается число спектральных каналов за счет уменьшения числа задействованных на суммирование сумматоров. Это обеспечивает уменьшение разрешения на местности при некотором ухудшении разрешения по спектру. При решении задач исследования природных ресурсов, наоборот, фокусное расстояние уменьшается (ухудшается пространственное разрешение), но увеличивается число сумматоров, на которые с помощью ключей поступают сигналы, то есть уменьшается спектральное разрешение. Таким образом, устройство способно с повышенной эффективностью решать задачи двойного назначения.
подключен к i-ому входу j-го сумматора. Таким образом, каждый j-ый сумматор через ключ присоединен к выходу каждой из i-ой линеек фотопреобразователя. Управляющие входы ключей подключены к выходу блока управления. Блок управления управляет включением ключей. В результате на вход каждого сумматора может поступать сигнал с одного или нескольких (до N числа) спектральных каналов. Сумматоры суммируют спектральные каналы, управляя тем самым спектральным разрешением и повышая отношение сигнал/шум. Блок управления управляет приводом и работой всех ключей. Например, при решении задач техногенного характера по команде, поступающей из блока управления, увеличивается фокусное расстояние, но сокращается число спектральных каналов за счет уменьшения числа задействованных на суммирование сумматоров. Это обеспечивает уменьшение разрешения на местности при некотором ухудшении разрешения по спектру. При решении задач исследования природных ресурсов, наоборот, фокусное расстояние уменьшается (ухудшается пространственное разрешение), но увеличивается число сумматоров, на которые с помощью ключей поступают сигналы, то есть уменьшается спектральное разрешение. Таким образом, устройство способно с повышенной эффективностью решать задачи двойного назначения.
Структурная схема предлагаемого устройства представлена на чертеже. Устройство содержит последовательно размещенные оптическую систему с переменным фокусным расстоянием 1, входную щель 2, диспергирующую систему 3 и матрицу фотопреобразователей 4. Матрица фотопреобразователей 4 состоит из N-числа линеек фотопреобразователей, где N - максимальное число спектральных каналов. Матрица фотопреобразователей 4 может быть выполнена в виде линейных приборов с зарядовой связью. Входная щель размещена перпендикулярно направлению полета носителя устройства. Ориентация каждой линейки матрицы фотопреобразователей 4 совпадает с ориентацией входной щели 2. Выход каждой i-ой  линейки матрицы фотопреобразователей 4 одновременно подключен к входу каждого i-ого ключа 5 j-ой
линейки матрицы фотопреобразователей 4 одновременно подключен к входу каждого i-ого ключа 5 j-ой  группы ключей 5. Выход каждого i-ого ключа 5 j-ой группы подключен к i-ому входу j-го сумматора 6. Общее количество сумматоров 6 равно количеству групп М (М≤N), подключаемых к выходу одной линейки матрицы фотопреобразователей 4 через соответствующие ключи 5. Выход каждого сумматора 6 подключен к соответствующему входу блока передачи информации 7. Выход блока управления 8 устройства соединен с приводом 9 оптической системы с переменным фокусным расстоянием 1, управляющим входом блока передачи информации 7 и управляющим входом каждого ключа 5.
группы ключей 5. Выход каждого i-ого ключа 5 j-ой группы подключен к i-ому входу j-го сумматора 6. Общее количество сумматоров 6 равно количеству групп М (М≤N), подключаемых к выходу одной линейки матрицы фотопреобразователей 4 через соответствующие ключи 5. Выход каждого сумматора 6 подключен к соответствующему входу блока передачи информации 7. Выход блока управления 8 устройства соединен с приводом 9 оптической системы с переменным фокусным расстоянием 1, управляющим входом блока передачи информации 7 и управляющим входом каждого ключа 5.
Оптическое изображение строки подстилающей поверхности с помощью оптической системы с переменным фокусным расстоянием 1 и входной щели 2 проецируется на диспергирующую систему 3. Спектр изображения строки подстилающей поверхности с выхода диспергирующей системы 3 проецируется на светочувствительную поверхность матрицы фотопреобразователей 4. Ориентация входной щели 2 и линеек матрицы фотопреобразователей 4 выбраны таким образом, что на каждую линейку матрицы фотопреобразователей 4 проецируется i-ый  спектральный диапазон оптического изображения строки подстилающей поверхности. Протяженность каждой линейки матрицы фотопреобразователей 4 определяет количество пространственных элементов разложения в строке. Видеосигнал с выхода каждой линейки матрицы фотопреобразователей 4 через соответствующие ключи 5 поступает на входы сумматоров 6. Блок управления 8 выполнен с возможностью управления работой ключей 5 таким образом, что на выходе j-го сумматора 6
спектральный диапазон оптического изображения строки подстилающей поверхности. Протяженность каждой линейки матрицы фотопреобразователей 4 определяет количество пространственных элементов разложения в строке. Видеосигнал с выхода каждой линейки матрицы фотопреобразователей 4 через соответствующие ключи 5 поступает на входы сумматоров 6. Блок управления 8 выполнен с возможностью управления работой ключей 5 таким образом, что на выходе j-го сумматора 6  будет действовать видеосигнал, пропорциональный сумме видеосигналов с выходов нескольких линеек матрицы фотопреобразователей 4, то есть j-ый сумматор 6 может суммировать от двух до N спектральных каналов в зависимости от режима работы блока управления 8, и одновременного управления приводом 9 оптической системы с переменным фокусным расстоянием 1 в зависимости от режима работы, увеличивая или уменьшая фокусное расстояние, соответственно уменьшая или увеличивая разрешение на местности, что соответствует уменьшению или увеличению чувствительности устройства в целом. Сигналы с выхода каждого сумматора 6 поступают в блок передачи информации 7, который передает информацию потребителям. Выбор номера i-ой линейки матрицы фотопреобразователей 4, подключаемой к входам соответствующего j-го сумматора 6, и требуемое фокусное расстояние оптической системы с переменным фокусным расстоянием 1 зависят от режима работы блока управления 8, определенного заранее по известной задаче исследования подстилающей поверхности, известному фону подстилающей поверхности района наблюдения и предполагаемым спектральным характеристикам объекта наблюдения. Информация о режиме работы блок управления 8 либо заранее закладывается в блок управления 8, либо передается по командной радиолинии на входе блока управления 8. Например, наблюдения за сельскохозяйственными культурами в черноземной зоне принципиально отличаются по выбору спектральных диапазонов и требуемому пространственному разрешению от задач создания городских кадастров.
будет действовать видеосигнал, пропорциональный сумме видеосигналов с выходов нескольких линеек матрицы фотопреобразователей 4, то есть j-ый сумматор 6 может суммировать от двух до N спектральных каналов в зависимости от режима работы блока управления 8, и одновременного управления приводом 9 оптической системы с переменным фокусным расстоянием 1 в зависимости от режима работы, увеличивая или уменьшая фокусное расстояние, соответственно уменьшая или увеличивая разрешение на местности, что соответствует уменьшению или увеличению чувствительности устройства в целом. Сигналы с выхода каждого сумматора 6 поступают в блок передачи информации 7, который передает информацию потребителям. Выбор номера i-ой линейки матрицы фотопреобразователей 4, подключаемой к входам соответствующего j-го сумматора 6, и требуемое фокусное расстояние оптической системы с переменным фокусным расстоянием 1 зависят от режима работы блока управления 8, определенного заранее по известной задаче исследования подстилающей поверхности, известному фону подстилающей поверхности района наблюдения и предполагаемым спектральным характеристикам объекта наблюдения. Информация о режиме работы блок управления 8 либо заранее закладывается в блок управления 8, либо передается по командной радиолинии на входе блока управления 8. Например, наблюдения за сельскохозяйственными культурами в черноземной зоне принципиально отличаются по выбору спектральных диапазонов и требуемому пространственному разрешению от задач создания городских кадастров.
При составлении описания были использованы следующие источники патентной и научно-технической информации:
1. A.Literman and ctr. General outlines of the POLDER experiment. SPIE PROCEEDINGS SERIES, Volume 2583, Paris, France, 1995, p 245...251.
2. Дистанционное зондирование: количественный подход. Под редакцией Ф.Свейна и Ш.Дейвис, М.: "Недра", 1983, стр.36.
3. Г.Аванесов и др. Многоканальная сканирующая система "Фрагмент". - Исследование Земли из космоса, 1981, №5, стр.40...44.
4. Ю.К.Королев, Ю.В.Баранов. Современный рынок данных дистанционного зондирования. ГИС ассоциация. Информационный бюллетень №3, вып.2, 1996, стр.66...75.
5. А.Елизаренко и др. Оптико-электронные системы в исследовании природных ресурсов, М.: "Недра", 1984, стр.201, рис.60.
6. Г.Горелов. Нерегулярная дискретизация сигналов, М: "Радио и связь", 1982.
7. Г.И.Лебедева, А.А.Гарбуль. "Перспективные аэрокосмические зеркальные объективы", Оптический журнал, 1994, №8, стр.57...62.
Изобретение относится к области приборостроения и может быть использовано для получения изображения подстилающей поверхности с борта космического аппарата. Технический результат - повышение эффективности исследования природных ресурсов Земли и наблюдения за техногенными объектами достигается тем, что осуществляют дополнительное введение М групп по N ключей, М сумматоров и привода оптической системы с переменным фокусным расстоянием. Таким образом, появляется возможность одновременно регулировать разрешение и чувствительность устройства: уменьшая фокусное расстояние, увеличивать количество спектральных диапазонов оптического изображения, и наоборот, увеличивая фокусное расстояние, уменьшать количество спектральных диапазонов. 1 ил.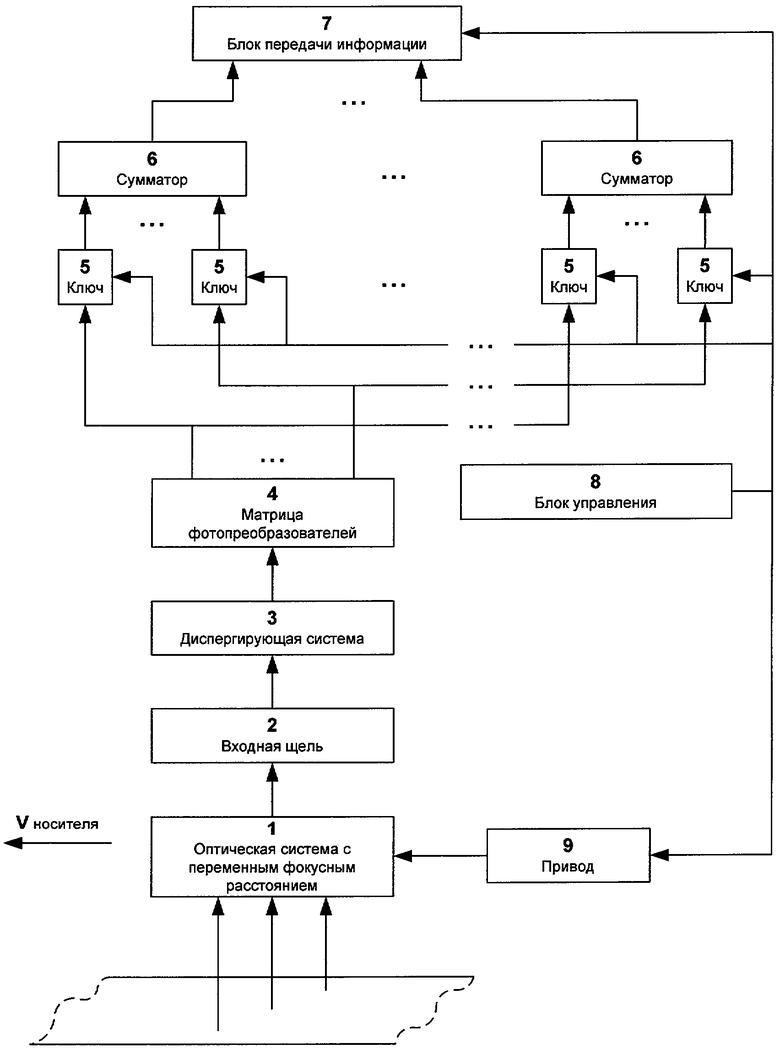
Многоспектральное сканирующее устройство, содержащее блок передачи информации, последовательно размещенные оптическую систему и матрицу фотопреобразователей, состоящую из N линеек фотопреобразователей соответствующих числу N максимально возможного количества регистрируемых зон спектра оптического излучения подстилающей поверхности, причем ориентация каждой линейки фотопреобразователей совпадает с ориентацией входной щели и перпендикулярна направлению полета носителя аппаратуры, отличающееся тем, что дополнительно введены М групп по N ключей в каждой, М сумматоров, привод оптической системы с переменным фокусным расстоянием, оптическая система выполнена в виде оптической системы с переменным фокусным расстоянием, причем выход i-й линейки матрицы фотопреобразователей подключен одновременно к входу i-го ключа в каждой j-й группе ключей, выход i-го ключа j-й группы ключей соединен с i-м входом j-го сумматора, выход каждого из которых подключен к j-му входу блока передачи информации, а блок управления выполнен с возможностью управления работой ключей таким образом, что на выходе j-го сумматора будет действовать видеосигнал, пропорциональный сумме видеосигналов с выходов N линеек матрицы фотопреобразователей  , и одновременного управления приводом оптической системы с переменным фокусным расстоянием в зависимости от режима работы, увеличивая или уменьшая фокусное расстояние, при этом соответствующие выходы блока управления соединены с управляющим входом каждого ключа непосредственно, с входом управления фокусным расстоянием оптической системы с переменным фокусным расстоянием через привод оптической системы с переменным фокусным расстоянием и входом блока передачи информации, причем информация о режиме работы блока управления либо заранее закладывается в блок управления, либо передается по командной радиолинии на вход блока управления.
, и одновременного управления приводом оптической системы с переменным фокусным расстоянием в зависимости от режима работы, увеличивая или уменьшая фокусное расстояние, при этом соответствующие выходы блока управления соединены с управляющим входом каждого ключа непосредственно, с входом управления фокусным расстоянием оптической системы с переменным фокусным расстоянием через привод оптической системы с переменным фокусным расстоянием и входом блока передачи информации, причем информация о режиме работы блока управления либо заранее закладывается в блок управления, либо передается по командной радиолинии на вход блока управления.
| СПОСОБ ПРОВЕДЕНИЯ СЪЕМКИ ЗЕМНОЙ ПОВЕРХНОСТИ ИЗ КОСМОСА | 2002 |
|
RU2227900C2 |
| Способ дистанционного зондирования атмосферы и подстилающей поверхности Земли | 1983 |
|
SU1111582A1 |
| Способ космической сканерной съемки природных ресурсов | 1989 |
|
SU1707474A1 |
| Система дистанционного зондирования атмосферы и подстилающей поверхности Земли | 1988 |
|
SU1679426A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ПОЧВЫ, ПОДВЕРЖЕННОЙ ДЕГРАДАЦИИ | 2004 |
|
RU2265839C1 |
| US 6271877 B1, 07.08.2001 | |||
| US 6714240 В1, 30.03.2004. | |||

