Изобретение относится к радиолокации, а именно к устройствам для мониторинга природной среды, и может быть использовано в спутниковых комплексах метеорологического и природно-ресурсного назначения.
Цель изобретения состоит в повышении точности определения координат фрагментов радиоизображения и оперативности дешифровки радиоизображений.
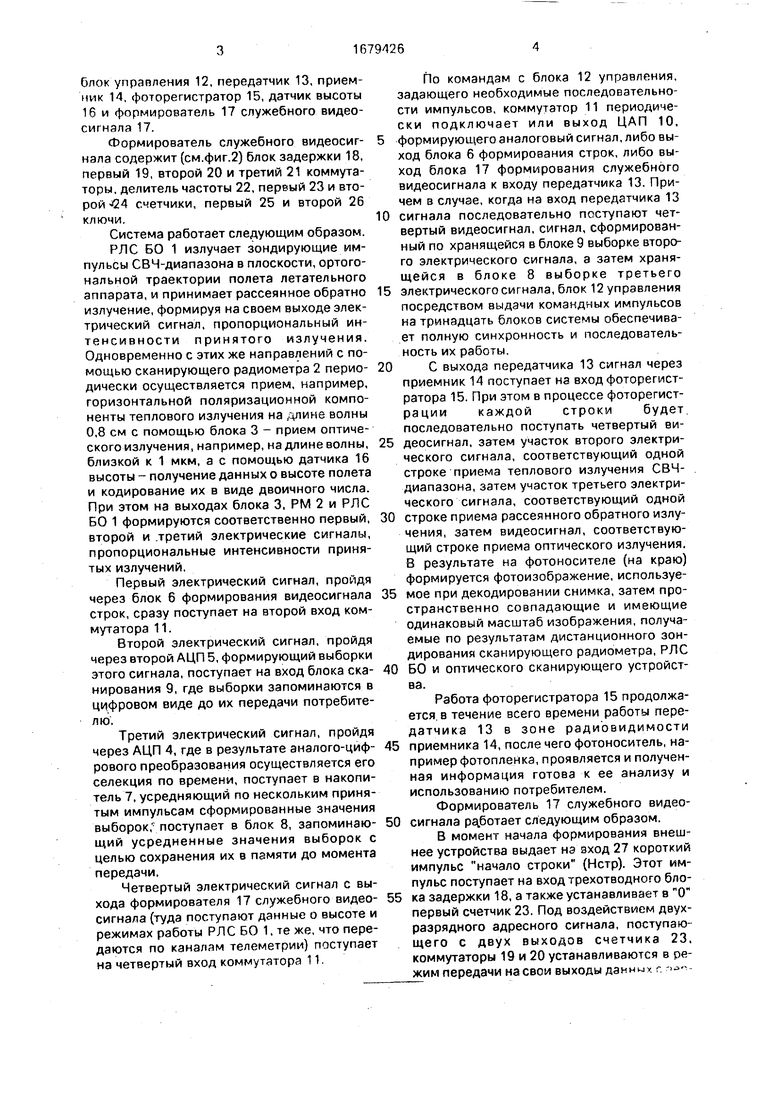
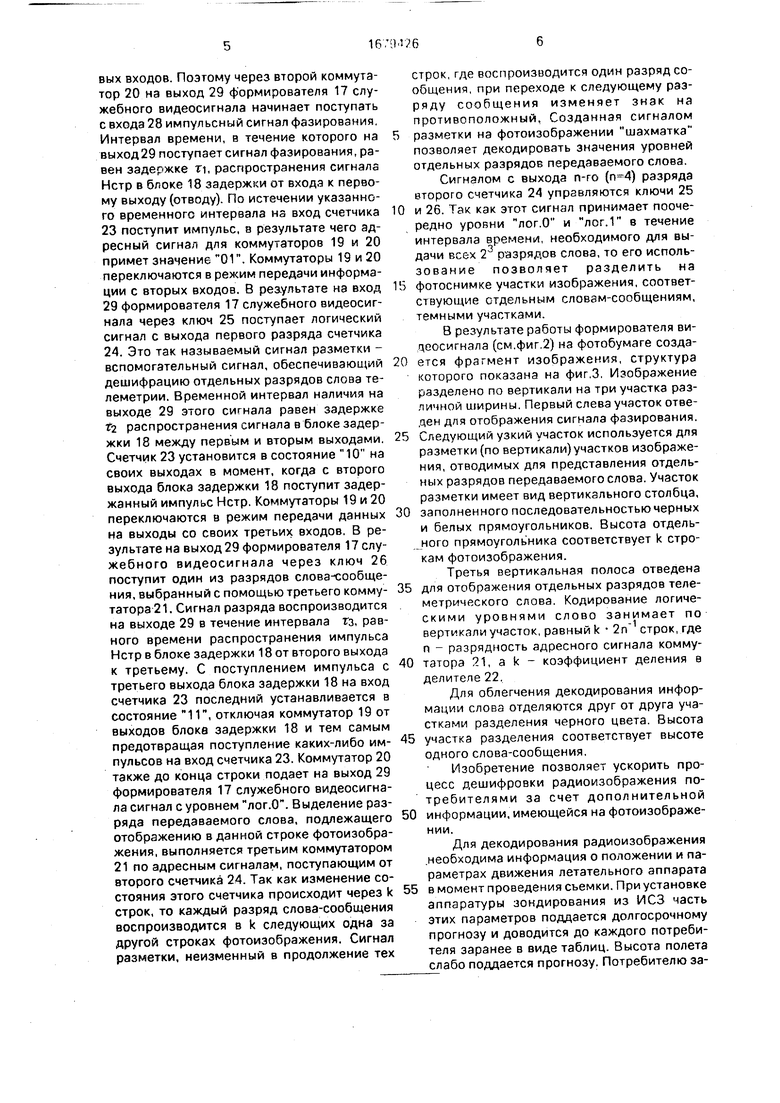
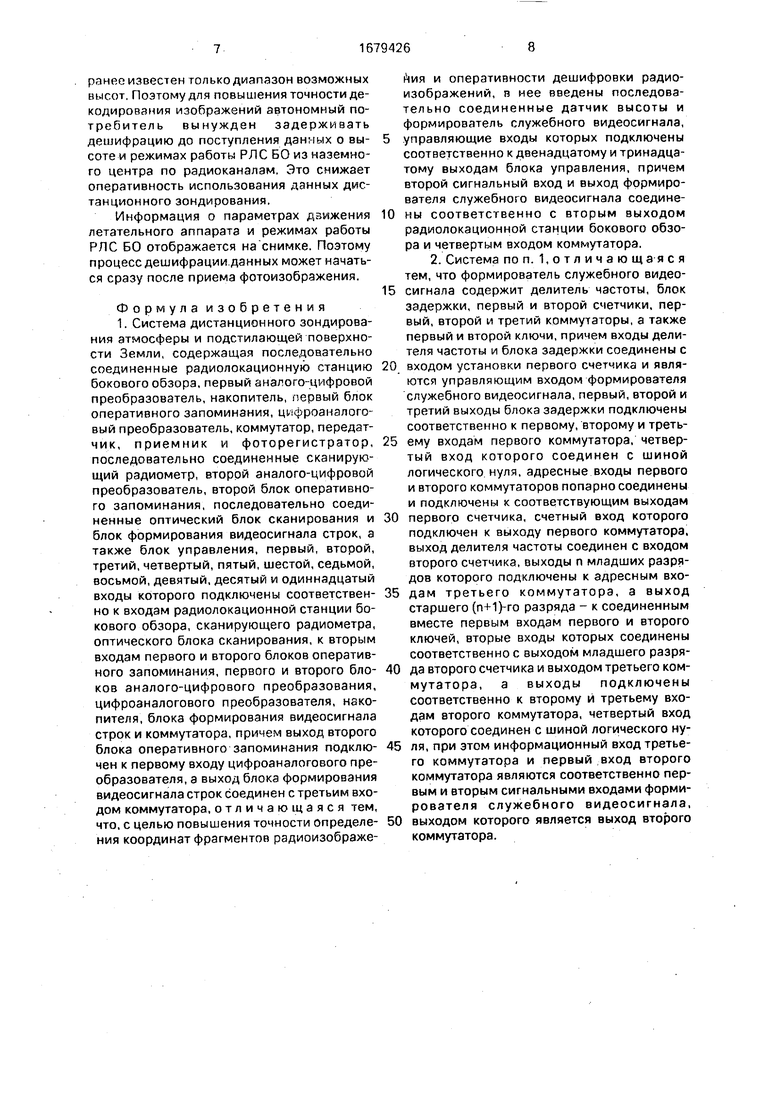
На фиг.1 представлена структурная электрическая схема системы дистанционного зондирования атмосферы и подстилающей поверхности Земли; на фиг.2 структурная электрическая схема формирователя служебного видеос нала; на фиг.З - участок фотоизображения, получаемый на фотоносителе при регистрации служебного видеосигнала.
Система содержит радиолокационную станцию бокового обзора (РЛС БО) 1, сканирующий радиометр (РМ) 2, оптический блок 3 сканирования, первый 4 и второй 5 аналого-цифровые преобразователи (АЦП), блок 6 формирования видеосигнала строк, накопитель 7, первый 8 и второй 9 блоки оперативного запоминания, цифроанэлоговый преобразователь (ЦАП) 10, коммутатор 11,
О
VI ю к о
блок управления 12, передатчик 13, приемник 14, фоторегистратор 15, датчик высоты 16 и формирователь 17 служебного видеосигнала 17.
Формирователь служебного видеосигнала содержит (см.фиг.2) блок задержки 18, первый 19, второй 20 и третий 21 коммутаторы, делитель частоты 22, первый 23 и второй 24 счетчики, первый 25 и второй 26 ключи.
Система работает следующим образом.
РЛС БО 1 излучает зондирующие импульсы СВЧ-диапазона в плоскости, ортогональной траектории полета летательного аппарата, и принимает рассеянное обратно излучение, формируя на своем выходе электрический сигнал, пропорциональный интенсивности принятого излучения. Одновременно с этих же направлений с помощью сканирующего радиометра 2 периодически осуществляется прием, например, горизонтальной поляризационной компоненты теплового излучения на длине волны 0,8 см с помощью блока 3 - прием оптического излучения, например, на длине волны, близкой к 1 мкм, а с помощью датчика 16 высоты - получение данных о высоте полета и кодирование их в виде двоичного числа. При этом на выходах блока 3, РМ 2 и РЛС БО 1 формируются соответственно первый, второй и .третий электрические сигналы, пропорциональные интенсивности принятых излучений.
Первый электрический сигнал, пройдя через блок 6 формирования видеосигнала строк, сразу поступает на второй вход коммутатора 11.
Второй электрический сигнал, пройдя через второй АЦП 5, формирующий выборки этого сигнала, поступает на вход блока сканирования 9, где выборки запоминаются в цифровом виде до их передачи потребителю.
Третий электрический сигнал, пройдя через АЦП 4, где в результате аналого-цифрового преобразования осуществляется его селекция по времени, поступает в накопитель 7, усредняющий по нескольким принятым импульсам сформированные значения выборок; поступает в блок 8, запоминающий усредненные значения выборок с целью сохранения их в памяти до момента передачи.
Четвертый электрический сигнал с выхода формирователя 17 служебного видеосигнала (туда поступают данные о высоте и режимах работы РЛС БО 1, те же, что передаются по каналам телеметрии) поступает на четвертый вход коммутатора 11.
По командам с блока 12 управления, задающего необходимые последовательности импульсов, коммутатор 11 периодически подключает или выход ЦАП 10,
формирующего аналоговый сигнал, либо выход блока 6 формирования строк, либо выход блока 17 формирования служебного видеосигнала к входу передатчика 13. Причем в случае, когда на вход передатчика 13
0 сигнала последовательно поступают четвертый видеосигнал, сигнал, сформированный по хранящейся в блоке 9 выборке второго электрического сигнала, а затем хранящейся в блоке 8 выборке третьего
5 электрического сигнала,блок 12 управления посредством выдачи командных импульсов на тринадцать блоков системы обеспечивает полную синхронность и последовательность их работы.
0 С выхода передатчика 13 сигнал через приемник 14 поступает на вход фоторегистратора 15. При этом в процессе фоторегистрации каждой строки будет последовательно поступать четвертый ви5 деосигнал, затем участок второго электрического сигнала, соответствующий одной строке приема теплового излучения СВЧ- диапазона, затем участок третьего электрического сигнала, соответствующий одной
0 строке приема рассеянного обратного излучения, затем видеосигнал, соответствующий строке приема оптического излучения. В результате на фотоносителе (на краю) формируется фотоизображение, используе5 мое при декодировании снимка, затем пространственно совпадающие и имеющие одинаковый масштаб изображения, получаемые по результатам дистанционного зондирования сканирующего радиометра, РЛС
0 БО и оптического сканирующего устройства.
Работа фоторегистратора 15 продолжается в течение всего времени работы передатчика 13 в зоне радиовидимости
5 приемника 14, после чего фотоноситель, например фотопленка, проявляется и полученная информация готова к ее анализу и использованию потребителем.
Формирователь 17 служебного видео0 сигнала работает следующим образом.
В момент начала формирования внешнее устройства выдает нэ вход 27 короткий импульс начало строки (Нстр). Этот импульс поступает на входтрехотводного бло5 ка задержки 18, а также устанавливает в О первый счетчик 23. Под воздействием двухразрядного адресного сигнала, поступающего с двух выходов счетчика 23, коммутаторы 19 и 20 устанавливаются в режим передачи на свои выходы данных г входов. Поэтому через второй коммутатор 20 на выход 29 формирователя 17 служебного видеосигнала начинает поступать с входа 28 импульсный сигнал фазирования. Интервал времени, в течение которого на выход 29 поступает сигнал фазирования, равен задержке TI, распространения сигнала Нстр в блоке 18 задержки от входа к первому выходу (отводу). По истечении указанного временного интервала на вход счетчика 23 поступит импульс, в результате чего адресный сигнал для коммутаторов 19 и 20 примет значение 01. Коммутаторы 19 и 20 переключаются в режим передачи информации с вторых входов. В результате на вход 29 формирователя 17 служебного видеосигнала через ключ 25 поступает логический сигнал с выхода первого разряда счетчика 24. Это так называемый сигнал разметки - вспомогательный сигнал, обеспечивающий дешифрацию отдельных разрядов слова телеметрии. Временной интервал наличия на выходе 29 этого сигнала равен задержке ti распространения сигнала в блоке задержки 18 между первым и вторым выходами. Счетчик 23 установится в состояние 10 на своих выходах в момент, когда с второго выхода блока задержки 18 поступит задержанный импульс Нстр. Коммутаторы 19 и 20 переключаются в режим передачи данных на выходы со своих третьих входов. В результате на выход 29 формирователя 17 служебного видеосигнала через ключ 26 поступит один из разрядов слова-сообщения, выбранный с помощью третьего коммутатора 21. Сигнал разряда воспроизводится на выходе 29 в течение интервала тз, равного времени распространения импульса Нстр в блоке задержки 18 от второго выхода к третьему. С поступлением импульса с третьего выхода блока задержки 18 на вход счетчика 23 последний устанавливается в состояние 11, отключая коммутатор 19 от выходов блока задержки 18 и тем самым предотвращая поступление каких-либо импульсов на вход счетчика 23. Коммутатор 20 также до конца строки подает на выход 29 формирователя 17 служебного видеосигнала сигнал с уровнем лог.О. Выделение разряда передаваемого слова, подлежащего отображению в данной строке фотоизображения, выполняется третьим коммутатором 21 по адресным сигналам, поступающим от второго счетчика 24. Так как изменение состояния этого счетчика происходит через к строк, то каждый разряд слова-сообщения воспроизводится в k следующих одна за другой строках фотоизображения. Сигнал разметки, неизменный в продолжение тех
строк, где воспроизводится один разряд сообщения, при переходе к следующему разряду сообщения изменяет знак на противоположный. Созданная сигналом
разметки на фотоизображении шахматка
позволяет декодировать значения уровней
отдельных разрядов передаваемого слова.
Сигналом с выхода n-го (п-4) разряда
второго счетчика 24 управляются ключи 25
0 и 26. Так как этот сигнал принимает поочередно уровни лог.О и нлог.1 в течение интервала времени, необходимого для выдачи всех 2 разрядов слова, то его использование позволяет разделить на
5 фотоснимке участки изображения, соответствующие отдельным словам-сообщениям, темными участками.
В результате работы формирователя видеосигнала (см.фиг.2) на фотобумаге созда0 ется фрагмент изображения, структура которого показана на фиг.З. Изображение разделено по вертикали на три участка различной ширины. Первый слева участок отведен для отображения сигнала фазирования.
5 Следующий узкий участок используется для разметки (по вертикали)участков изображения, отводимых для представления отдельных разрядов передаваемого слова. Участок разметки имеет вид вертикального столбца,
0 заполненного последовательностью черных и белых прямоугольников. Высота отдельного прямоугольника соответствует k строкам фотоизображения.
Третья вертикальная полоса отведена
5 для отображения отдельных разрядов телеметрического слова. Кодирование логическими уровнями слово занимает по вертикали участок, равный k 2rf строк, где п - разрядность адресного сигнала комму0 тзтора 21, a k - коэффициент деления в делителе 22.
Для облегчения декодирования информации слова отделяются друг от друга участками разделения черного цвета. Высота
5 участка разделения соответствует высоте одного слова-сообщения.
Изобретение позволяет ускорить процесс дешифровки радиоизображения потребителями за счет дополнительной
0 информации, имеющейся на фотоизображении.
Для декодирования радиоизображения необходима информация о положении и параметрах движения летательного аппарата
5 в момент проведения съемки. При установке аппаратуры зондирования из ИСЗ часть этих параметров поддается долгосрочному прогнозу и доводится до каждого потребителя заранее в виде таблиц. Высота полета слабо поддается прогнозу. Потребителю заранее известен только диапазон возможных высот. Поэтому для повышения точности декодирования изображений автономный потребитель вынужден задерживать дешифрацию до поступления данных о высоте и режимах работы РЛС БО из наземного центра по радиоканалам. Это снижает оперативность использования данных дистанционного зондирования.
Информация о параметрах движения летательного аппарата и режимах работы РЛС БО отображается на снимке. Поэтому процесс дешифрации данных может начаться сразу после приема фотоизображения.
Формула изобретения 1. Система дистанционного зондирования атмосферы и подстилающей поверхности Земли, содержащая последовательно соединенные радиолокационную станцию бокового обзора, первый аналого-цифровой преобразователь, накопитель, первый блок оперативного запоминания, цпфроанэлого- вый преобразователь, коммутатор, передатчик, приемник и фоторегистратор, последовательно соединенные сканирующий радиометр, второй аналого-цифровой преобразователь, второй блок оперативного запоминания, последовательно соединенные оптический блок сканирования и блок формирования видеосигнала строк, а также блок управления, первый, второй, третий, четвертый, пятый, шестой, седьмой, восьмой, девятый, десятый и одиннадцатый входы которого подключены соответственно к входам радиолокационной станции бокового обзора, сканирующего радиометра, оптического блока сканирования, к вторым входам первого и второго блоков оперативного запоминания, первого и второго блоков аналого-цифрового преобразования, цифроаналогового преобразователя, нзко- пителя, блока формирования видеосигнала строк и коммутатора, причем выход второго блока оперативного запоминания подключен к первому входу цифроаналогового преобразователя, а выход блока формирования видеосигнала строк соединен с третьим входом коммутатора, отличающаяся тем, что, с целью повышения точности определения координат фрагментов радиоизображейия и оперативности дешифровки радиоизображений, в нее введены последовательно соединенные датчик высоты и формирователь служебного видеосигнала,
управляющие входы которых подключены соответственно к двенадцатому и тринадцатому выходам блока управления, причем второй сигнальный вход и выход формирователя служебного видеосигнала соединены соответственно с вторым выходом радиолокационной станции бокового обзора и четвертым входом коммутатора.
2. Система по п. 1,отличаю ща я с я тем, что формирователь служебного видеосигнала содержит делитель частоты, блок задержки, первый и второй счетчики, первый, второй и третий коммутаторы, а также первый и второй ключи, причем входы делителя частоты и блока задержки соединены с
входом установки первого счетчика и являются управляющим входом формирователя служебного видеосигнала, первый, второй и третий выходы блока задержки подключены соответственно к первому, второму и третьему входам первого коммутатора, четвертый вход которого соединен с шиной логического нуля, адресные входы первого и второго коммутаторов попарно соединены и подключены к соответствующим выходам
первого счетчика, счетный вход которого подключен к выходу первого коммутатора, выход делителя частоты соединен с входом второго счетчика, выходы п младших разрядов которого подключены к адресным входам третьего коммутатора, а выход старшего (п+1)-го разряда - к соединенным вместе первым входам первого и второго ключей, вторые входы которых соединены соответственно с выходом младшего разряда второго счетчика и выходом третьего ком- мутатора, а выходы подключены соответственно к второму и третьему входам второго коммутатора, четвертый вход которого соединен с шиной логического нуля, при этом информационный вход третьего коммутатора и первый вход второго коммутатора являются соответственно первым и вторым сигнальными входами формирователя служебного видеосигнала,
выходом которого является выход второго коммутатора.
Фие1
.: t -5;
fc $
& $

| название | год | авторы | номер документа |
|---|---|---|---|
| Способ дистанционного зондирования атмосферы и подстилающей поверхности Земли | 1983 |
|
SU1111582A1 |
| Устройство регистрации электрических сигналов на фотопленке | 1983 |
|
SU1173188A1 |
| Устройство для считывания изображений | 1988 |
|
SU1645979A1 |
| Устройство для отображения информации на экране телевизионного индикатора | 1987 |
|
SU1441452A1 |
| Устройство для преобразования информации в видеосигнал | 1982 |
|
SU1111151A1 |
| Устройство для отображения информации | 1987 |
|
SU1529279A1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2084922C1 |
| Устройство для ввода информации | 1988 |
|
SU1536368A1 |
| Устройство для отображения информации | 1984 |
|
SU1229802A1 |
| Устройство для контроля дисплея | 1980 |
|
SU941986A1 |


Изобретение относится к радиолокации. Цель изобретения - повышение точности определения координат фрагментов радиоизображения путем повышения оперативности дешифровки радиоизображений. Для этого в устройство, содержащее радиолокационную станцию 1 бокового обзора, сканирующий радиометр 2 и оптический блок 3 сканирования с совмещенными полями обзора, а также узлы совмещения данных, их передачи и регистрации, дополнительно введены датчика 16 высоты и фор- мирсватель 17 служебного видеосигнала, позволяющий включить в общий поток данных служебную информацию о текущем значении высоты космического аппарата и режиме работы радиолокационной станции 1, которая регистрируется вместе с основной информацией на общий фоторегистратор 15. Это позволяет отказ аться от использования телеметрических данных, поступающих с большим запаздыванием на удаленные от центра управления потребители информации, и сразу же после регистрации данных приступить к их интерпретации. 1 з.п. ф-лы, 3 ил.
...-.дщ- - --j
(сигнал тазцробания) /
Сигнал разметки
отдельных разрядоб слоба- сообщения
Фаг.З
™- NJ ГТ
-----
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Способ дистанционного зондирования атмосферы и подстилающей поверхности Земли | 1983 |
|
SU1111582A1 |
