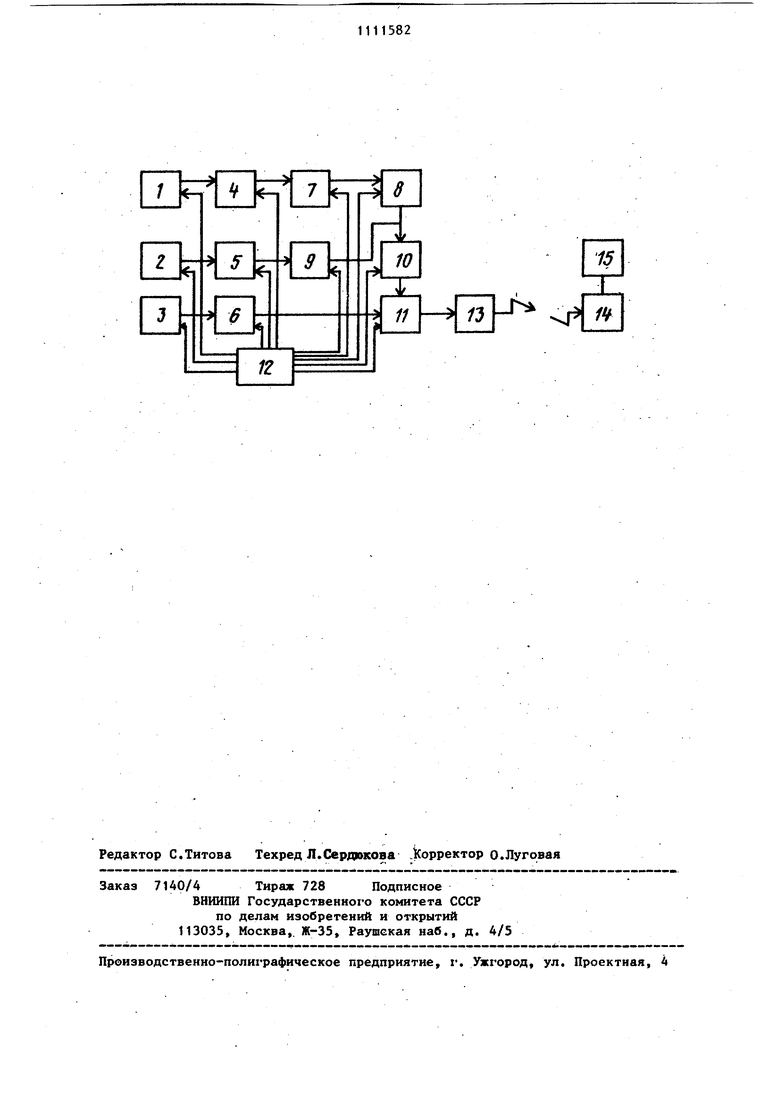
Изобретение относится к области метеороло1ическо1о зондирования атмосферы и подстилающей поверхности Земли, а именно к технике измерения рассеивания электромахнитного излучения, и может быть использовано в спутниковых системах оперативного картографирования климатического состояния земной поверхности и атмосферы. Известен способ дистанционного кар тографирования земной поверхности, заключающийся в поэлементном приеме радиотеплового излучения с направлений, лежащих в плоскости, ортогональ ной траектории движения летательного аппарата, формировании первого ви деосигнала, пропорционального интенсивности радиотеплового излучений, запоминании его, излучении зондирующих импульсов радиолокатора сантимет рового диапазона в плоскости, ортого нальной траектории движения летатель ,ного аппарата, приеме отраженной эне гии, формировании пропорционального ей второго видеосигнала и запоминании его, последовательной передаче первого и BTopoio видеосигналов в наземный пункт, приеме их и регистрации на отдельных фотоносителях, при этом о метеорологических характеристиках подстилающей поверхности судят по результатам анализа изображений радиотеплового и радиолокацион ного датчиков. Недостатком этого способа является отсутствие информации на полученных изображениях о состоянии атмос феры над зондируемыми участками зем-г ной поверхности, так как электромагнит.ное, Излучение в радиодиапазонё слабо взаимодействует с атмосферными объектами типа облаков или тумана Наиболее близким техническим решением к данному изобретению являетс способ дистанционного зондирования а мосферы и подстилающей поверхности Земли, заключающийся в поэлементном приеме оптического и радиотеплового излучения с направлений, лежащих в плоскости, ортогональной траектории движения летательного аппарата, формировании первого видеосигнала, пропорционального интенсивности оптичес-55 кого излучения, и запоминании его, формировании второго видеоси1нала, пропорциональйого интенсивности радио(Теплово1о излучения, и запоминании . его, излучении зондирующих импульсов радиолокатора сантиметрового диапазона в плоскости, ортогональной траектории движения летательного аппарата, приеме отраженной энергии, формировани пропорционального ей третьего видеосшнала и запоминании его, после- довательной передаче первого, второго и третьего видеосигналов в наземный пункт, приеме их и фоторегистрации на фотоносителе, при этом о метеорологических характеристиках подстилающей поверхности и атмосферы судят по результатам анализа изображений оптического, радиотеплового и радиолокационного датчиков. Недостатком этого способа является длительная процедура анализа изображения . Это связано с тем, что формирование изображений каждым из датчиков -осуществляется независимо от других. В результате приходится осуществлять дополнительную обработку изображений по установлению соответствия между их элементами. Целью изобретения является ускорение процесса получения метеорологических характеристик. Поставленная цель достигается тем, что в известном способе дистанционного зондирования атмосферы и подстилающей поверхности Земли,заключакицемся в поэлементном приеме оптического и радиотеплового излучений с направле : НИИ, лежащих в плоскости, ортогональной траектории движения летательного аппарата, формировании первого видеосигнала, пропорционального интенсивности оптического излучения, и запоминании его, формировании второго видеоси1нала, пропорционального интенсивности радиотеплового излучения, и запоминании его. Излучении зондирую1цих импульсов радиолокатора сантиметрового диапазона в плоскости, ортогональной траектории движения летательного аппарата, приеме отраженной энергии, формировании пропорционального ей третьего видеосигнала и запоминании его, последовательной передаче первого, второго и третьего видеосигналов в наземный пункт, приеме их и фоторегистрации на фотоносителе, при том о метеорологических характеристиках подстилающей поверхности и атмосферы судят по результатам анализа изображений оптического, радиотеплового и радиолокационного датчиков. дополнительно осуществляют синхронное сканирование диа1раммами направленности всех трех датчиков одних и тех же участков земной поверхности, а получающиеся изображения от трех датчиков регистрируют на одном и том же фотоносителе. Сущность способа заключается в сл дующем . В процессе периодически повторяюще гооя поэлементного приема одновременн оптического излучения на длине волны близкой к 1 мкм, теплового излучения на длине волны 0,8 см и рассеянного обратн излучения на длине волны 3,2 см осуществляется преобразование принятых излучений соответственно в первый, второй и третий электрические сигналы, пропорциональные интенсивности принятых излучений. Далее из первого электрического сигнала формируется видеосигнал строки, второй электрический сигнал запоминается, а третий электрический сигнал селектирует ся по времени, в результате чего фор мируются его выборки, соответствующи различным элементам строки обзора подстилающей поверхности, значение каждой из выборок усредняется по нескольким принятым импульсам обратног излучения, а усредненные значения вы борок запоминаются. Передача видеосигнала строк осуществляется в следующей последовательности. Перььм передается запомнен ный второй электрический сигнал. соответствующий одной строке приема радиотеплового излучения. Вторыми передаются запомненные усредненные зкачения выборок, соответствующие той же строке приема рассеянного обратно излучения. Третьим передается видео-: сигнал этой же строки приема оптичесKoio излучения, после чего указанная последовательность повторяется. В результате приема передаваемого видеосигнала и ево фоторе1истрации на одном фотоносителе формируются три изображения одно1о участка подстилающей поверхности, полученные соответст-50 венно в СВЧ и оптическом диапазонах спектра электромагнитно1о излучения. Полученное комплексное изображение позволяет идентифицировать различные типы подстилающих поверхностей (ледо- 55 вых покровов, поверхности океана и участков суши), определять их характеристики (возраст льда,волнение океана, состояние посевов и т.д.). Каждым из указанных средстц порознь однозначно характеризовать состояние поверхности не удается. Например, при определении приводно1о ветра радиолокатор реагирует на спектральною плотность ряби, а радиометр - на пену,.образующуюся на поверхности моря из-за обрушивания крупных волн, оптическая же система позволяет уточнить процент поверхности моря, занятой пеной. На чертеже представлена структурная схема системы, реализующая спо- соб оперативного дистанционного зондирования. Система, реализующая способ оперативного дистанционного зондирования, состоит из радиолокационной станций бокового обзора (РЛС ВО) 1, сканирующего радиометра (РМ) 2, оптического сканирующего устройства (ОСУ) 3, первого А и второго 5 аналого-цифровых преобразователей (АЦП), блока формирования видеосигнала строк 6, накопителя 7, первого 8 и второго 9 оперативных запоминающих устройств (ОЗУ), цифроаналогового преобразователя (ЦАП) 10, коммутатора 11, блока управления 12, передатчика 13, последовательно соединенных приемного устройства 14 и фоторегистратора 15. Причем выход РЛС БО через первый АЦП 4, накопитель 7 и первое ОЗУ 8 соединен с входом ЦАП 10, с которым через втород АЦП 5 и второе ОЗУ 9 также соеди„ р, 2. Выход ЦАП 10 соединен с первым входом коммутатора 11. Выход ОСУ 3 через блок формирования видеосигнала строк 6 соединен с вторым входом коммутатора 11, выход которого соединен с входом передатчика 13, а одиннадцать выходов блока управления 12 соединены с управляющими входами соответственно первых одиннадцати блоков системы. Система, реализующая данный способ, работает следующим образом. РЛС БО 1 излучает зондирующие импульсы СВЧ-диапазона (например, на длине волны 3,2 см) в плоскости, ортогональной траектории полета спутника, и принимает рассеянное обратно излучейие (в диапазоне углов места, капример, 20-50°), формируя на своем ьыходе третий электрический сигнал, пропорциональный интенсивности принятого излучения. Одновременно с этих же направлений с помощью сканирующего радиометра 2 осуществляется периодический прием, например, горизон: тально поляризованной компоненты теплового излучения на длине волны 0,8 см, а с помощью ОСУ 3 - прием оптического излучения, например, на длине волны, близкой к 1 мкм. При этом на выходах ОСУ 3 и РМ 2 формируются соответственно первый и второй электрические сигналы, пропорциональные интенсивности принятых излучений. Третий электрический сигнал, пройдя через АЦП 4, где в результате аналого-цифрового преобразования осуществляется его селекция по времени, и накопитель 7, усредняющий по нескольким принятым импульсам сформированные значениявыборок, поступает на ОЗУ В, запоминающее усредненные значения выборок с целью сохранения их в памяти до момента передачи. Второй электрический сихнал. прой дя через второй АЦП 5, также формирующий вьйорки этого сигнала, посту пает на вход второго ОЗУ 9, выборки запоминаются в цифровом виде до их передачи потребителю. Первый электри ческий сигнал, пройдя через блок фор мирования видеосигнала строк б (аналогичный имеющемуся в системе, реали зующей способ-прототип)/ сразу поступает на второй вход коммутатора 11 По, командам с блока управления 12 задающего необходимые последовательности импульсов, вход передатчика 13 работающего на частоте 137,5 МГц, через коммутатор 11 периодически под ключается либо к выходу ЦАП .10, форм рующего аналоговый сигнал, либо к выходу блока формирования строк 6. Причем в случае, когда на вход передатчика си1нала последовательно поступают запомненные в ОЗУ 9 выборки второго электрического сигнала, а затем запомненные в ОЗУ 8 выборки, третьего электрического сигнала, блок управления 12 посредством выдачи командных импульсов на первые одиннадцать блоков системы обеспечивает пол -J ную синхронность и требуемую последовательность их работы. С выхода передатчика 13 сигнал через приемник 14 поступает на вход фоторегистратора 15, при этом в процессе фоторегистрации каждой строки будут йоследовательно поступать выборки: второго электрического си1нала, соответствующие одной строке приема теплового излучения СВЧ-диапазона, затем третьего электрическо1О сигнала, соответствующие одной строке приема рассеяннох-о обратного излучения, и наконец видеосихнал, соответствующий строке приема оптическо1о излучения. В результате на одном фотоносителе формируются три пространственно совпадающих и имеющих одинаковый масштаб изображения, получаемых по результатам дистанционного зондирования сканирующего радиометра 1, РЛС ВО и оптического сканирующего устройства. Работа фоторегистратора 15 продолжается в течение всего времени работы передатчика 13 в зоне радиовидимости приемного устройства 14, после. чего фотоноситель, например фотопленка, проявляется и полученная информация готова к ее анализу и использованию потребителем. По сравнению с известным предложенный способ дистанционно1о зондиро ания на требует устанавливать соот-; ветствие между элементами изображений, полученных различными датчиками, и, следовательно позволяет ускорить процесс получения метеороло1ических характеристик.
J
| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного зондирования атмосферы и подстилающей поверхности Земли | 1988 |
|
SU1679426A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ СОСТОЯНИЯ ЛЕДЯНОГО ПОКРОВА | 2010 |
|
RU2449326C2 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2084922C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ОПТИЧЕСКИХ И ОПТОЭЛЕКТРОННЫХ СРЕДСТВ НАБЛЮДЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2278399C2 |
| СПОСОБ ОБНАРУЖЕНИЯ АТМОСФЕРНЫХ ОБРАЗОВАНИЙ | 1991 |
|
RU2007743C1 |
| СПОСОБ ДИСТАНЦИОННОГО ОПРЕДЕЛЕНИЯ ГЕОФИЗИЧЕСКИХ И ГЕОМЕТРИЧЕСКИХ ХАРАКТЕРИСТИК ОКЕАНОСФЕРЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2045747C1 |
| СИСТЕМА КОРРЕКЦИИ ОШИБОК ИНС ЛЕТАТЕЛЬНОГО АППАРАТА ПО ДОРОЖНОЙ КАРТЕ МЕСТНОСТИ | 2018 |
|
RU2684710C1 |
| СПОСОБ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ СОСТОЯНИЯ СИСТЕМЫ ОКЕАН - АТМОСФЕРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2047874C1 |
| Способ определения состояния ледяного покрова | 1988 |
|
SU1788487A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕТЕОРОЛОГИЧЕСКИХ ПАРАМЕТРОВ | 2007 |
|
RU2344448C2 |
СПОСОБ ДИСТАНЦИОННОГО ЗОНДИРОВАНИЯ АТМОСФЕРЫ И ПОДСТИЛАЮЩЕЙ ПОВЕРХНОСТИ ЗЕМЛИ, заключающийся в поэлементном приеме оптического и радиотеплового излучений с направлений, лежащих в плоскости, ортогональной траектории движения летательного аппарата, формировании первого видеосигнала, пропорционального интенсивноЪти оптического излучения, и запоминании его,-формировании второго видеосигнала, пропорционального интенсивности радиотеплового излучения, и запоминании его, излучении зондирующих импульсов радиолокатора сантиметрового диапазона в плоскости, ортогональной траектории движения летательного аппарата, приеме отра-. женной энергии, формировании про- порционального ей третьего видеосигнала и запоминании его, последовательной передаче первого, второго и третьего видеосигналов в наземный, пункт, приеме их и фоторегистрации на фотоносителе, при этом о метеороло1ических характеристиках подстилающей поверхности и атмосферы судят по результатам анализа изображений оптического, радиотеплового и радиолокационного датчиков, отличающийся тем, что, с целью ускорения процесса получения метеорологических характеристик, сл осуществляют синхронное сканирова- ; 00 ние диахраммами направленности всех ю трех датчиков одних и тех же участков земной поверхности, а получаннциеся изображения от трех, датчиков регистрируют на одном и том же фотоносителе.
| Надь Г.И | |||
| Цифровая обработка изображений, полученных при дистанционном исследовании природных ресурсов | |||
| В сб | |||
| Распознавание образцов при помощи цифровых вычислительных машинУПод | |||
| ред | |||
| Л.М.Хармона, М.: Мир, 1974, с | |||
| Автоматический огнетушитель | 0 |
|
SU92A1 |
| Lame D.B., Born | |||
| G.M., Dunne J.A., Spear A.J., Jamarone С.A | |||
| Seasai ; performance evaluation.The first two | |||
| steps.-IEEE Journal of Oceanic Engineering, 1980, V OE-5, №2, p | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ СТРОЕНИЯ ГОРНЫХ НАПЛАСТОВАНИЙ | 1926 |
|
SU7273A1 |
