Область техники
Настоящее изобретение относится к системам с жидким металлом и электролитом и, в частности, хотя и не исключительно, может применяться для повышения производительности и снижения эксплуатационных расходов в современных электролизерах для производства алюминия восстановлением.
Известный авторам уровень техники
Пример воплощения изобретения будет описан и проиллюстрирован в дальнейшем со ссылкой на производство или выплавку алюминия восстановлением.
Современные заводы по производству алюминия потребляют огромное количество электроэнергии. Практически все они функционируют на основе восстановления глинозема в электролизерах или, как их часто называют, электролизных ваннах. На практике, завод, выплавляющий алюминий в промышленных масштабах, может содержать несколько сотен таких электролизных ванн и работать в непрерывном режиме.
Этот процесс обладает двумя особенностями. Во-первых, он практически не изменился за более чем столетие, прошедшее с того времени, когда он был впервые успешно разработан (и получил известность как процесс Холла-Эру по имени двух ученых, которые впервые открыли его независимо друг от друга). Во-вторых, количество энергии, потребляемой в этом процессе, действительно огромно.
Согласно проведенным оценочным расчетам, современное производство алюминия потребляет около двух процентов всей электроэнергии, вырабатываемой по всему миру (!), причем большая часть этой энергии тратится на преодоление активных потерь в плохо проводящем, высоко резистивном слое электролита каждого отдельного плавильного электролизера. Первичный возбуждающий (приводящий в действие) электрический ток может иметь низкое напряжение, однако, учитывая упомянутые выше недостатки, его сила должна быть относительно очень высокой для того, чтобы процесс мог протекать, и поэтому любая модификация процесса, которая позволит значительно уменьшить этот ток, толщину электролита или оба этих параметра, действительно могла бы привести к существенному уменьшению потребления энергии по сравнению с потреблением энергии, требуемым сегодня без такой модификации.
Естественно, предпринимались попытки решить эту проблему, однако основным ограничительным фактором является то, что при уменьшении толщины электролита ниже определенного критического уровня возникают нестабильности на поверхности раздела между жидким электролитом и жидким алюминием. Эти нестабильности, проявляющиеся в виде всплесков жидкостей в электролизере, интенсивно исследовались в течение 20 или более лет. Фактически, они представляют собой межфазные гравитационные волны, измененные внешними магнитными полями, которые проходят через электролизер, и при превышении определенного порога стабильности эти волны могут расти за счет поглощения энергии из окружающих электрических и магнитных полей.
Положительным фактором является то, что период такой волны измеряется минутами, а скорость ее роста - часами, поэтому данная проблема может иметь какое-то контролируемое решение. Реальная проблема состоит в том, что стоит лишь такой волне развиться, она может нарушить процесс электролиза до такой степени, что потребуется отключить электролизер. В экстремальной ситуации она может разрушить весь электролизер.
Ранее предлагались следующие средства, направленные на исключение этих нестабильностей:
- размещение в алюминии перегородок с тем, чтобы разбивать волны с большой длиной волны, и при этом рассеивать компоненты с малой длиной волны за счет трения;
- использование наклонного катодного блока с тем, чтобы обеспечить постоянное стекание алюминия;
- разрушение стоячих волн путем размещения поглотителей гидравлической энергии на краях электролизера;
- наклон анода согласованно с волной с тем, чтобы слой электролита оставался практически равномерным, что позволяет исключить возмущение тока.
Первое из этих известных предложенных средств привлекает своей простотой, однако как оно, так и второе предложенное средство ограничены необходимостью найти материал для практического применения, который бы выдерживал химически агрессивную среду в плавильном электролизере. Дополнительной сложностью второго варианта является то, что тонкие слои алюминия не будут достаточно смачивать катод, а эту проблему невозможно решить легким или экономически выгодным способом. И хотя третий вариант понятен сам по себе, в самом недавнем времени исследования были сконцентрированы на последнем варианте, однако, насколько известно авторам, они еще не получили никакого практического воплощения.
Кроме того, близкой по отношению к настоящей заявке является работа, опубликованная в издательстве Elsevier Science 12 ноября 2001 г. авторами настоящего изобретения (А. Лукьянов, Г. Ел и С. Молоков), в которой определены общие предпосылки механизма нестабильности, однако, в основном, в контексте определения коэффициента отражения, а не предложения практического решения по управлению нестабильностью в электролизере, которое является одной из задач настоящего изобретения.
В заключение следует отметить, что, несмотря на продолжительный срок существования проблемы и важность современного производства алюминия для прогресса всего индустриального общества в эпоху, когда сбережение энергии становится еще более актуальным, чем когда-либо, нестабильность электролизеров для производства алюминия восстановлением глинозема остается, как это ни парадоксально, центральной и нерешенной проблемой в промышленности в целом.
Сущность изобретения
Авторы настоящего изобретения предлагают такую модификацию существующих возбуждаемых током систем с жидким металлом и электролитом (очевидным, но не ограничительным примером которых является электролизер для производства алюминия восстановлением глинозема), которая исходит из решения, совершенно отличного от любого другого из перечисленных выше, но которая может, по мнению авторов, использоваться в любой подходящей комбинации с некоторым, всеми или любыми из предложенных выше средств.
По существу, авторы предлагают накладывать на такую систему дополнительное внешнее магнитное поле, конфигурация и рабочие параметры которого выбираются таким образом, чтобы обеспечить значительное уменьшение толщины электролита по сравнению с толщиной, необходимой без данной модификации. С помощью этого авторы решают проблему устранения самого источника нестабильности, который возникает в результате взаимодействия токов, индуцированных движением на поверхности раздела, с внешним магнитным полем.
Исходя из понимания фундаментального механизма, управляющего такой нестабильностью, авторы полагают, что при использовании катушек соответствующей конструкции кольцевой ток вокруг электролизера, индуцирующий автоматизирующееся магнитное поле, будет в приемлемой, если не в полной, мере стабилизировать электролизер.
Таким образом, вместо того, чтобы пытаться полностью понять все процессы, протекающие внутри электролизера, авторы эффективно подавляют флуктуации путем наложения достаточно мощного и зависимого от времени магнитного поля вокруг электролизера. Современный электролизер для производства алюминия (или любого другого металла) путем восстановления представляет собой сложное и высоко оптимизированное устройство. В таком электролизере (ячейке) протекает множество физических и химических процессов, многие из которых неизбежно взаимодействуют между собой. Небольшое изменение любого параметра может привести к совершенно неожиданным последствиям, которые могут быть, а могут и не быть взаимосвязанными или полностью прогнозируемыми. Сама величина первичного возбуждающего (приводящего электролизер в действие) тока делает практически невозможными попытки относительно небольших регулировок в любом аспекте работы электролизера - например, согласно упомянутому выше четвертому известному из уровня техники подходу к решению этой проблемы на основе "наклона анода" - с какой-либо реальной гарантией хотя бы частичного успеха.
В противоположность этому, авторы проанализировали все аспекты и полагают, что с помощью соответствующей конструкции и при возможности регулировки управляющих параметров (т.е. амплитуды поля, частоты и постоянного фона) можно в обозримом будущем и с большой степенью вероятности достичь на практике реального подавления нестабильности.
Согласно дополнительному аспекту изобретения, прикладываемое магнитное поле является по существу вертикальным магнитным полем. В этом направлении имеет место значительное влияние на нестабильность в жидком металле-электролите, позволяющее уменьшить толщину самого электролита ниже уровней, при которых обычно возникает нестабильность.
Согласно следующему дополнительному аспекту изобретения, магнитное поле зависит от амплитуды и частоты, значения которых аппроксимируются посредством анализа отражения волн на бесконечной стенке. Это является очень выгодным, так как позволяет быстро определить подходящее магнитное поле, вместо того, чтобы, полагаясь на опыт специалиста, определять подходящее поле посредством более экстенсивного (трудоемкого) анализа.
Краткое описание прилагаемых чертежей
На прилагаемых чертежах:
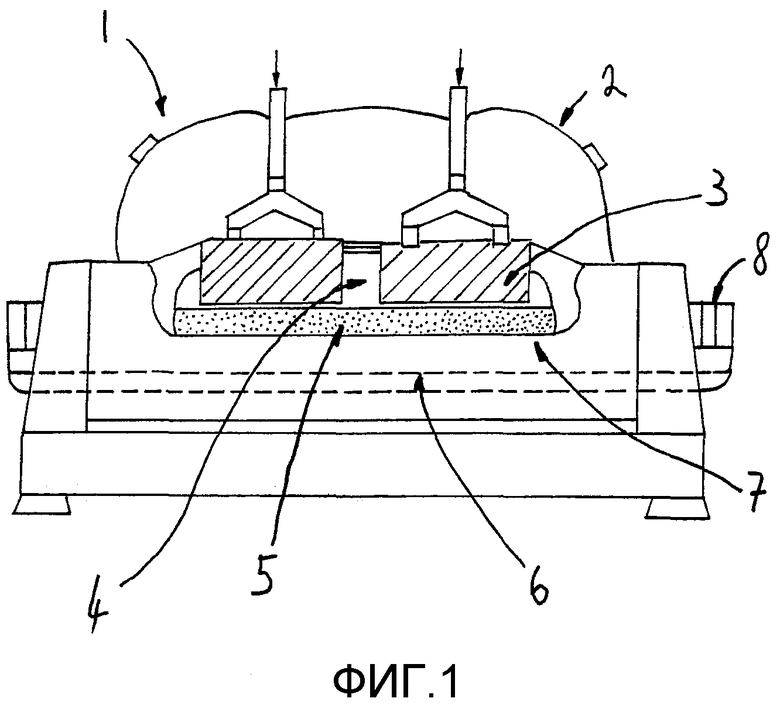
фиг.1 изображает в весьма схематичном виде современный электролизер Холла-Эру;
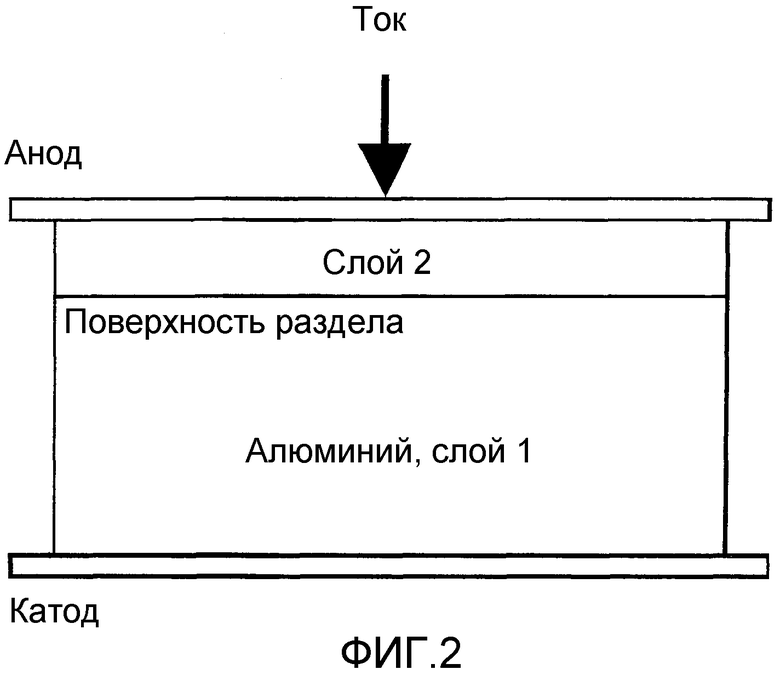
фиг.2 схематически представляет зону электролиза в таком электролизере;
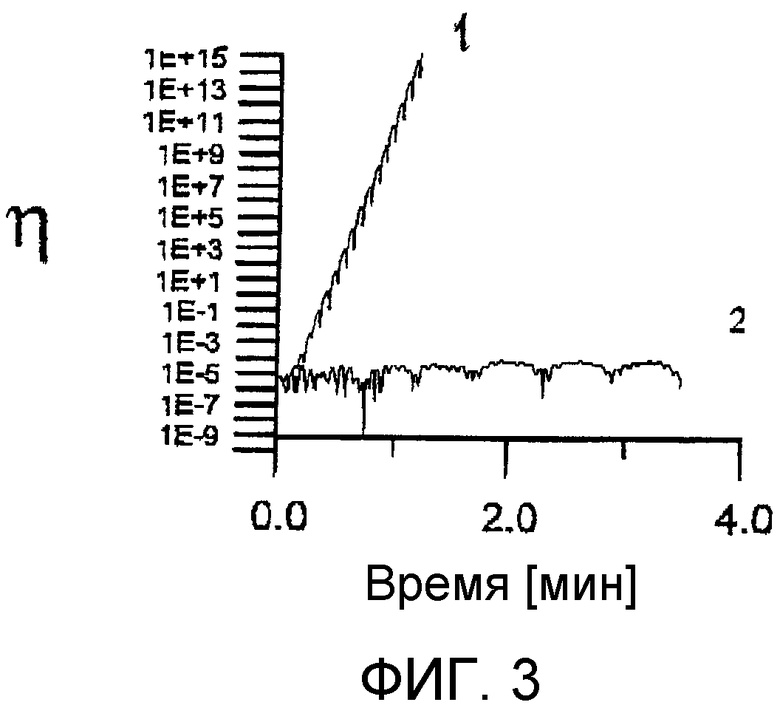
фиг.3 графически изображает существующие и модифицированные уровни нестабильности, имеющие место, соответственно, в немодифицированном электролизере и в электролизере, модифицированном согласно настоящему изобретению;
фиг.4 изображает, снова в схематическом виде, одну возможную установку, воплощающую изобретение;
фиг.5 показывает схематическую диаграмму двухслойной системы;
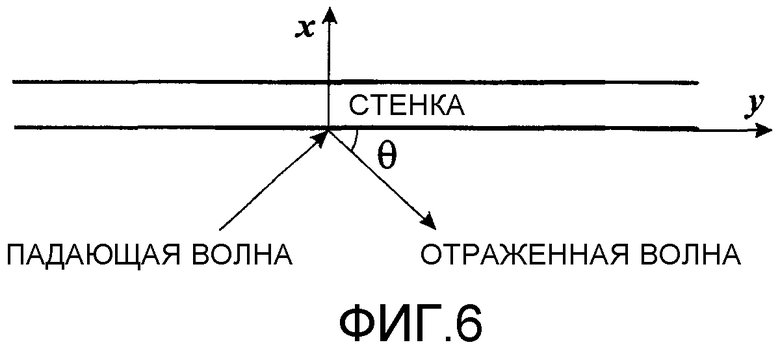
фиг.6 показывает схематическую диаграмму отражения волны на бесконечной плоской стенке;
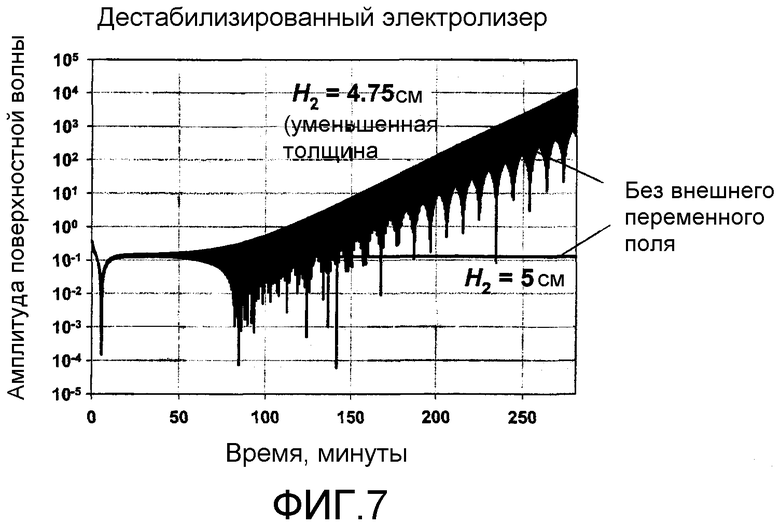
фиг.7 графически изображает амплитуду межфазной волны для двух толщин электролита без приложения переменного поля;
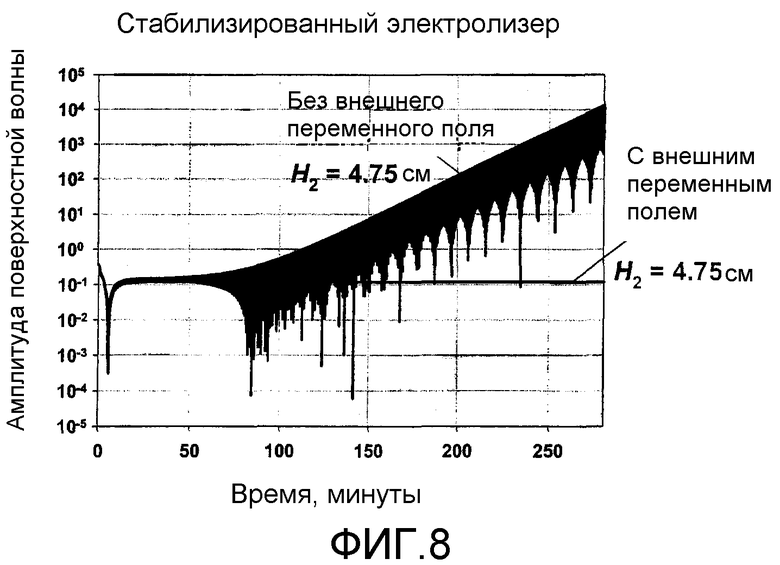
фиг.8 графически изображает амплитуду межфазной волны для электролизера с уменьшенной толщиной электролита в присутствии переменного магнитного поля и без него.
Подробное описание изобретения
На фиг.1 изображен пример современного электролизера Холла-Эру, обозначенного в общем ссылочным номером 1. Электролизер 1 содержит крышки 2, угольные аноды 3, расплавленный солевой электролит 4, расплавленный алюминий 5, коллекторные катодные стержни 6, угольную футеровку 7 и угольную шину 8. Все эти конструктивные элементы могут быть стандартного вида или же могут быть модифицированы или заменены, в случае необходимости, специалистом в данной области другими соответствующими конструктивными элементами или группами конструктивных элементов, не выходя за рамки изобретательского замысла.
Ток, используемый при электролизе, поступает в зону электролиза вертикально через анод и собирается катодом, расположенным в днище. Толщина обоих слоев, т.е. электролита и алюминия, очень мала по сравнению с их горизонтальными размерами. Схематически зону электролиза можно представить так, как показано на фиг.2.
Основная часть потребляемой энергии расходуется на активные потери (т.е. потери на омическое сопротивление) в плохо проводящем электролите, т.е. в слое 2 на фиг.2. Однако при уменьшении глубины электролита ниже некоторого критического уровня или при превышении током некоторого критического уровня электролизер становится нестабильным. Иными словами, начинают расти волны на поверхности раздела между этими двумя жидкостями. Результирующее приращение нестабильности показано на фиг.3 (кривая 1).
Предлагается прикладывать внешнее переменное магнитное поле и регулировать индуцированные этим полем токи таким образом, чтобы управлять нестабильностью или даже подавлять ее. На фиг.4 представлена общая схема возможной установки. На этом чертеже кольцевой ток вокруг электролизера индуцирует переменное магнитное поле. На практике переменное магнитное поле можно генерировать, например, с помощью катушек, окружающих электролизер, или других средств, тщательно подобранных специалистом в данной области. Результаты моделирования для круглого электролизера, являющегося примером наиболее нестабильного случая, представлены кривой 2 на фиг.3. Можно заметить, что нестабильность исчезла. Анализ для более реалистичного прямоугольного электролизера показывает, что данный способ успешно работает также и в этом случае (фиг.8). Авторы полагают, что специалист сможет адаптировать данный способ для электролизера с любой геометрией.
Описание основополагающей теории и примерных результатов
В последующем описании представлена стабилизация течения переменным магнитным полем, а эффект подавления нестабильностей продемонстрирован на примере двухслойной системы с прямоугольной геометрией.
А) Математическая модель динамики магнитогидродинамически (МГД) модифицированной межфазной гравитационной волны в закрытой области
Рассмотрим систему из двух электропроводящих жидкостей (жидкий металл и электролит), по которым течет электрический ток с плотностью J и на которые воздействует магнитное поле В, представленную на фиг.5.
В равновесном состоянии

В данном случае (x, y, z) - это декартовы координаты. Последняя зависимость подразумевает, что вертикальная компонента магнитного поля B0z может быть произвольной (заданной внешней цепью).
Пусть толщина жидкого металлического слоя в равновесном состоянии будет H1, а толщина электролита - H2. Любое отклонение поверхности раздела от равновесного состояния (которое неизбежно присутствует в реальном электролизере) вызывает перераспределение тока (а следовательно, и магнитного поля). Этот процесс сопровождается волновым движением двухслойной жидкой системы. В отсутствии электрического тока система стабильна (амплитуда исходного возмущения поверхности раздела не растет в процессе распространения волны). В конечном итоге, волна будет затухать в результате естественного рассеяния в системе. В противоположность этому, когда протекает ток, взаимодействие возмущения тока с внешним магнитным полем может усилить волновое движение и привести к неконтролируемому росту амплитуды межфазной волны.
Динамика этой двухслойной системы описывается следующими уравнениями:


где i=1, 2 - это номер слоя на фиг.5; ρi - плотность; ui - скорость жидкости; Pi - гидродинамическое давление; Ji - плотность электрического тока в слое (которая включает в себя изменения, вызванные волновым движением); В - общее магнитное поле (которое включает в себя поле, индуцированное внешней цепью); t - время; Fi=Ji×B - сила Лоренца; Di - рассеяние, описывающее потери энергии в слое. Член рассеяния берется в обычном виде из уравнений для мелкой воды, т.е. Di=νiui, где νi - коэффициент рассеяния.
Граничные условия для двухслойной жидкой системы, помещенной в плохо проводящую ванну, таковы

где n - единичный вектор, перпендикулярный к конкретной поверхности.
Граничные условия по току (4) подразумевают следующее ранжирование проводимостей: σбок.стенок<<σ2<<σднища<<σ1, что характерно для промышленных электролизеров для производства алюминия восстановлением (в типичном случае σ1=3,3·106 (Ом·м)-1, σ2=200 (Ом·м)-1, σднища=2·104 (Ом·м)-1, σбок.стенок≈0.
Система уравнений (2) вместе с граничными условиями (3), (4) полностью описывает движение двухслойной системы.
В дальнейшем будет обсуждаться отклонение поверхности раздела z=h(x,y,t) от равновесного состояния при z=0. Система описывающих уравнений (2) может быть существенно упрощена, если ввести два малых параметра, предлагаемых согласно действительным физическим и инженерным условиям в электролизерах для производства алюминия восстановлением, а именно
ε=H1/L<<1, параметр для мелкой воды. Здесь L - горизонтальный размер электролизера. В типичном случае ε∝0,01.
δ=max h/H1<<1, где max h - амплитуда межфазной волны.
Это означает, что нас интересует динамика возмущений с малой амплитудой, которая отлично подходит для анализа стабильности.
Применение этих двух параметров означает, что для первого порядка в δ движение поверхности раздела является по существу двухмерным, и поэтому действительны следующие зависимости

где νi, η, fi - это новые неизвестные функции 0(1). Они представляют собой соответственно нормированную скорость, возмущения поверхности раздела и силу Лоренца.
Принимая во внимание приближение (5) малой амплитуды для мелкой воды, анализ исходных уравнений (2)-(4) показывает, что для первого порядка в (можно сделать следующие выводы:
возмущение тока, вызванное движением поверхности раздела, является горизонтальным, т.е. J≈J0+j||(x,y,t) (здесь и далее подстрочный индекс «||» означает компоненту вектора в (х,y)-плоскости),
сила Лоренца, действующая на жидкий металл, зависит только от вертикальной компоненты внешнего магнитного поля:
f1≈j||×BOZ,
сила Лоренца, действующая на электролит, является намного меньшей, чем сила Лоренца, действующая на жидкий металл, т.е. |f2|<<|f1|.
В результате можно прийти к заключению, что за счет управления вертикальной компонентой магнитного поля BOZ (которое задано внешней цепью), можно управлять силой, вызывающей нестабильное движение поверхности раздела. Одной из таких возможностей является наложение определенного переменного магнитного поля на внешнее стационарное поле.
Поэтому рассмотрим следующую форму вертикальной компоненты этого поля
BOZ=B0b(x,y,t),
где BOZ - константа, а функция b(x,y,t) может быть произвольной. В предыдущих исследованиях предполагалось, что магнитное поле является постоянным (т.е. независимым от времени) и фиксированным.
С учетом всех сделанных выше допущений управляющее системой движение поверхности раздела имеет вид


В данном случае 
 - это скорость межфазных гравитационных волн в отсутствии внешнего магнитного поля, φ(x,y,t)=σ1B0g-1(ρ1-ρ2)-1ϕ(x,y,t) - это нормированный электрический потенциал (т.е. j||=-σ1▿ϕ), а
- это скорость межфазных гравитационных волн в отсутствии внешнего магнитного поля, φ(x,y,t)=σ1B0g-1(ρ1-ρ2)-1ϕ(x,y,t) - это нормированный электрический потенциал (т.е. j||=-σ1▿ϕ), а
β=J0Bo/[H1H2(ρ1-ρ2)g].
Следует отметить, что естественное рассеяние в электролизерах играет критически важную роль для стабильности существующих установок. Типичное значение безразмерного параметра β в этом случае составляет ˜20. Без рассеяния стабильная работа возможна только для малых значений β≈1, которые практически недостижимы.
Граничные условия (3), (4) дают

В данном случае функция Γ(х,у)=0 определяет форму границы (горизонтальную геометрию электролизера); ∂/∂n и ∂/∂τ соответствуют нормальной и тангенциальной производным Γ=0 соответственно.
Анализ системы уравнений (6)-(8) специалистами в простейшем случае, когда b≡1 (однородное, постоянное магнитное поле), выявил механизм, лежащий в основе межфазной нестабильности. По существу, было показано, что нестабильность (если она возникает) вызывается на границах электролизера за счет отражения волн при коэффициенте отражения более 1. В предыдущих исследованиях не учитывался именно этот фактор механизма нестабильности для однородного внешнего магнитного поля. Для полей такого типа первый член в правой стороне уравнения (6) исчезает (стремится к нулю), и уравнение (6) становится по существу несвязанным с уравнением (7). Именно граничное условие (8b) отвечает за развитие нестабильности. При этом существует средство устранения нестабильности - это произвольная функция b(x,y,t), которая по существу представляет собой прикладываемое извне магнитное поле при этом граничном условии.
Исходя из этой основополагающей теории можно найти предпочтительное внешнее магнитное поле b(x,y,t) согласно изобретению, которое приведет в результате к ослаблению или даже подавлению нестабильности.
Следующие результаты представлены для простейшего случая пространственно однородного переменного магнитного поля

В данном случае b0 - нормированная амплитуда, ω0 - частота и θ0 - исходная фаза управляющего внешнего магнитного поля, которое необходимо получить.
Для электролизера c реалистичной геометрией необходимо численно решить проблему, описанную уравнениями (6)-(8). В вычислениях для конкретного случая прямоугольного электролизера, представленных далее, можно использовать центральные различия второго порядка. Уравнение (6) можно дискредитировать, используя явную схему решения во времени. Для решения уравнения (7) можно использовать быстрый решатель уравнения Пуассона (т.е. устройство или программу для быстрого решения уравнения Пуассона).
Для вычисления можно использовать 32 точки на единицу длины. Эта схема была успешно испытана на нескольких проблемах оценки характеристик системы для обеспечения высокой точности и отсутствия численного разброса. Можно также использовать другие методы определения предпочтительных видов магнитного поля, которые специалисты смогут выбрать из известных альтернатив.
Приближение для параметров b0 и ω0 можно получить из соответствующей проблемы отражения от бесконечной плоской стенки (см. раздел В). Начиная от этих исходных оценок, частоту и амплитуду либо увеличивают, либо уменьшают для минимизации приращения нестабильности. Эти параметры регулируются итеративно (т.е. в ходе многократных итераций) до тех пор, пока не будет достигнута стабильность поверхности раздела.
В) Приблизительное определение амплитуды и частоты внешнего магнитного поля: отражение от бесконечной плоской стенки
В этом разделе будет представлен один пример анализа отражения от бесконечной плоской стенки.
Как амплитуду, так и частоту управляющих параметров внешнего магнитного поля оценивают с помощью простейшей модели отражения плоской волны от бесконечной границы в отсутствии рассеяния, как показано на фиг.6.
В предыдущем исследовании такого типа при допущении, что b≡1, было обнаружено, что для некоторых углов падения коэффициент отражения μ составляет более 1. Иными словами, волна усиливается на границе. Ясно, что в присутствии переменного магнитного поля b(t), заданного уравнением (9), получаем μ=μ(b0,ω0). Теперь попытаемся найти такие управляющие параметры b0 и ω0, при которых коэффициент отражения μ≤1. Для достижения этого удобно представить проблему отражения плоской волны от стенки в виде интегрального уравнения для y-компоненты Фурье в η(x,y,t).
Зависимые переменные в проблеме отражения представлены в виде

 ,
,
где ky - волновое число падающей волны.
Преобразование Фурье относительно х приводит к следующему интегральному уравнению для функции  на границе
на границе

при этом функция удовлетворяет уравнению

Применив далее преобразование Фурье по t, т.е.  получим следующее решение уравнения (11):
получим следующее решение уравнения (11):

где  а C1(ω), C2(ω) - спектральные мощности падающей и отраженной волн. Подстановка уравнения (12) в уравнение (10) дает функциональное уравнение, которое связывает спектральные мощности отраженной волны и падающей волны, а именно
а C1(ω), C2(ω) - спектральные мощности падающей и отраженной волн. Подстановка уравнения (12) в уравнение (10) дает функциональное уравнение, которое связывает спектральные мощности отраженной волны и падающей волны, а именно
Уравнение (13) можно решить итеративно (т.е. в ходе многократных итераций) при допущении, что спектральная мощность падающей волны задана, например С1(ω)=1. Это дает значения b0 и ω0, которые можно использовать в качестве исходной точки в нашем анализе нестабильности для прямоугольного электролизера с рассеянием. Кроме того, для достижения стабильности эти параметры необходимо настроить с помощью разработанного численного кода.
Следует отметить, что уравнение (10) можно использовать для решения более общей обратной проблемы. То есть, если задать спектральную мощность падающей и отраженной волн, то можно получить необходимую временную зависимость управляющего магнитного поля b(t), вместо того, чтобы допускать любую параметрическую форму типа (9) априори.
С) Управление нестабильностью в прямоугольном электролизере
Стабилизирующий эффект переменного магнитного поля в прямоугольном электролизере будет продемонстрирован на следующем примере. Пусть геометрические параметры электролизера будут следующими: длина L1=9,8 м, ширина L2=3,4 м, толщина слоя электролита Н2=5 см, а толщина слоя алюминия Н1=25 см. Общий ток, протекающий через электролизер, Ic=175 кА. Постоянное внешнее магнитное поле было принято таким: В0=3·10-3 Тл. Эти условия соответствуют стабильному процессу производства алюминия, что подтверждается компьютерным моделированием и соответствует горизонтальной кривой на фиг.7.
Если уменьшить толщину слоя электролита на 5%, т.е. Н2=4,75 см, то электролизер станет очень нестабильным. Такая нестабильность показана в виде растущей кривой на фиг.7. Как видно, скорость роста является достаточно существенной, и через 30 минут возникает короткое замыкание.
На фиг.8 показан электролизер с меньшей толщиной слоя алюминия, стабилизированный переменным полем.
Работа электролизера с такой же (уменьшенной) толщиной слоя электролита, но с применением переменного магнитного поля, заданного уравнением (9), где b0=0,66, ω0=20 рад·сек-1, θ0=0, показана на фиг.8.
Надлежащие частота ω0 и амплитуда b0 были определены согласно предложенному способу, описанному в разделе В), и настроены (отрегулированы) для достижения стабильности. Исходные значения не намного отличались от тех, которые обеспечивают стабильную работу, т.е. b0 аппрокс≈1,66, ω0 аппрокс≈40 рад·сек-1. Следует отметить, что b0 нормировано по В=3·10-3 Тл.
В результате электролизер стал стабильным, как показано на фиг.8. Как будет показано в следующем разделе, этот результат особенно благоприятен с точки зрения действительной (реальной) экономии энергии.
D) Уменьшение потребления энергии
Рассчитаем потери энергии в слое электролита на один миллиметр при указанных выше параметрах. Проводимость расплавленного электролита составляет σе=200 (Ом·м)-1. Тогда на каждый миллиметр слоя электролита (ΔL=1 мм) потери энергии на Джоулево рассеяние будут: We=I2 cΔL/(σeL1L2)=4,6 кВт. Поскольку предложенное наложение или приложение магнитного поля позволило уменьшить толщину слоя электролита на ΔH2=2,5 мм, то из этого следует, что потребление электрической энергии можно уменьшить на ΔW2=11,5 кВт. С другой стороны, для создания стабилизирующего внешнего переменного магнитного поля с помощью катушки необходимо затратить не более Ws=57 Вт, при условии, что катушка содержит 300 витков медной проволоки диаметром 0,5 см.
Итак, отношение энергий составляет всего Ws/ΔWe=0,5%. То есть, затраты энергии на создание управляющего магнитного поля очень малы по сравнению с достигнутой экономией.
Двухслойные системы, по которым течет электрический ток в присутствии магнитного поля, можно стабилизировать посредством приложения внешнего переменного магнитного поля. Вычисления для типичной геометрии промышленного электролизера для производства алюминия путем восстановления в присутствии однородного поля показали, что потери энергии, необходимые для стабилизации, являются минимальными.
Подобные вычисления могут быть выполнены для электролизеров различных форм и даже для пространственно неоднородных магнитных полей. Специалист сможет приспособить описанную выше основополагающую теорию к каждому конкретному случаю, тогда как объем настоящего изобретения определен в прилагаемой формуле изобретения.

Изобретение относится к возбуждаемой током системе известного вида с жидким металлом и электролитом, усовершенствованная посредством наложения на нее дополнительного внешнего изменяющегося во времени и/или переменного магнитного поля. Прикладываемое магнитное поле предпочтительно является по существу вертикальным магнитным полем, значения амплитуды и частоты дополнительного внешнего изменяющегося во времени и/или переменного магнитного поля определены посредством анализа отражения волн на стенке, параметры которой достаточно репрезентативны для параметров стенки электролизера, причем дополнительное внешнее изменяющееся во времени и/или переменное магнитное поле приложено, по существу, на границе электролизера. 2 н. и 9 з.п. ф-лы, 8 ил.
уменьшают толщину упомянутого слоя электролита по сравнению с обычной толщиной слоя электролита;
определяют значения амплитуды и частоты дополнительного внешнего изменяющегося во времени и/или переменного магнитного поля посредством анализа отражения волн на стенке, параметры которой достаточно репрезентативны для параметров стенки электролизера; и
накладывают на упомянутый электролизер дополнительное внешнее изменяющееся во времени и/или переменное магнитное поле, зависящее от упомянутых амплитуды и частоты, значения которых определены таким образом, что наложенное на электролизер результирующее магнитное поле стремится параметрически и динамически десинхронизировать любую возникающую резонансную нестабильность, по существу, около стенок электролизера;
причем энергия, затрачиваемая на упомянутое дополнительное магнитное поле, мала по сравнению с энергией, затрачиваемой на работу электролизера.
| US 4090930 A 23.05.1978 | |||
| US 4976841 A 11.12.1980 | |||
| US 4565748 A 21.01.1986 | |||
| Способ сдвига и перевертывания частотного спектра | 1934 |
|
SU44963A1 |
| RU 94029216 А1 1997.04.27. | |||

