Текст описания приведен в факсимильном виде.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РЕЙСА ДЛЯ ПОЕЗДА | 2007 |
|
RU2484994C2 |
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РЕЙСА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2481988C2 |
| МНОГОУРОВНЕВАЯ СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РАБОТЫ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2359857C2 |
| СПОСОБ, СИСТЕМА И КОМПЬЮТЕРНЫЙ ПРОГРАММНЫЙ КОД ДЛЯ ОПТИМИЗАЦИИ РЕЙСА С ПОМОЩЬЮ ПОПОЛНЕНИЯ БАЗЫ ДАННЫХ ЖЕЛЕЗНОДОРОЖНЫХ СОСТАВОВ/ПУТЕЙ | 2007 |
|
RU2469387C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ ПАРАМЕТРОВ МНОЖЕСТВА ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ, ДЕЙСТВУЮЩИХ В ЖЕЛЕЗНОДОРОЖНЫХ СЕТЯХ С МНОЖЕСТВОМ ПЕРЕСЕЧЕНИЙ | 2007 |
|
RU2466049C2 |
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ ДВИЖЕНИЯ ПОЕЗДА | 2007 |
|
RU2501695C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ РАБОТЫ ПОЕЗДА С УЧЕТОМ ПАРАМЕТРОВ ВАГОНА | 2007 |
|
RU2605648C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ РАБОТЫ ПОЕЗДА С УЧЕТОМ ПАРАМЕТРОВ ВАГОНА | 2007 |
|
RU2470814C2 |
| СПОСОБ ДЛЯ ПЛАНИРОВЩИКА ДВИЖЕНИЯ НА ОСНОВЕ МОДЕЛИРОВАНИЯ | 2008 |
|
RU2484995C2 |
| Система для управления работой направления железнодорожной сети на основе виртуальной сортировки вагонов | 2020 |
|
RU2738778C1 |
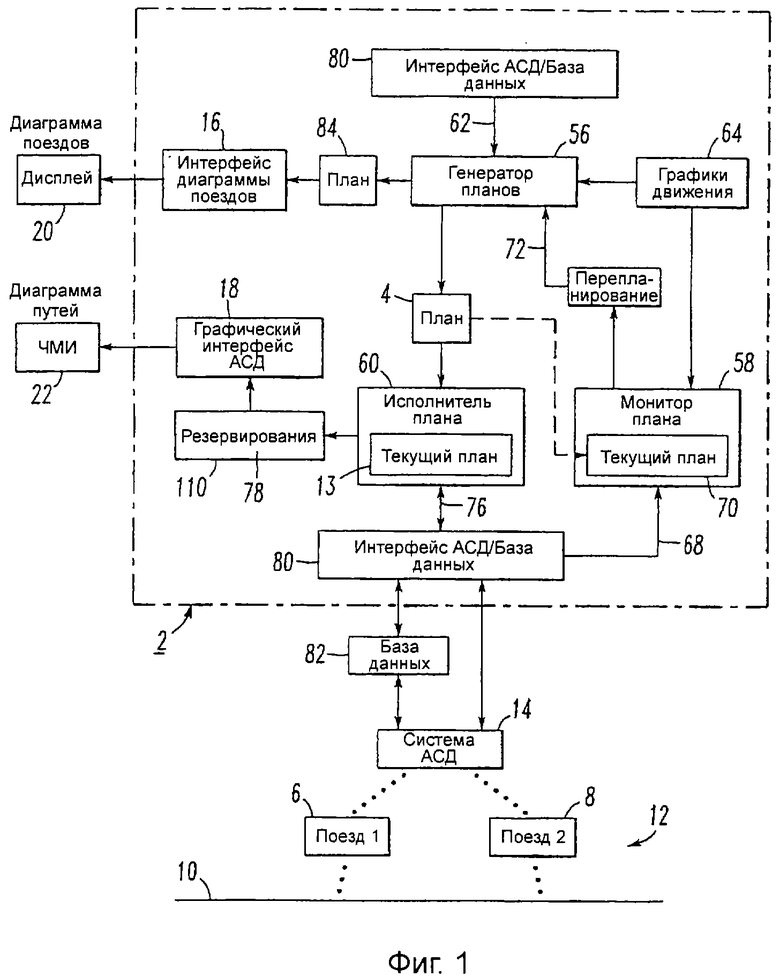
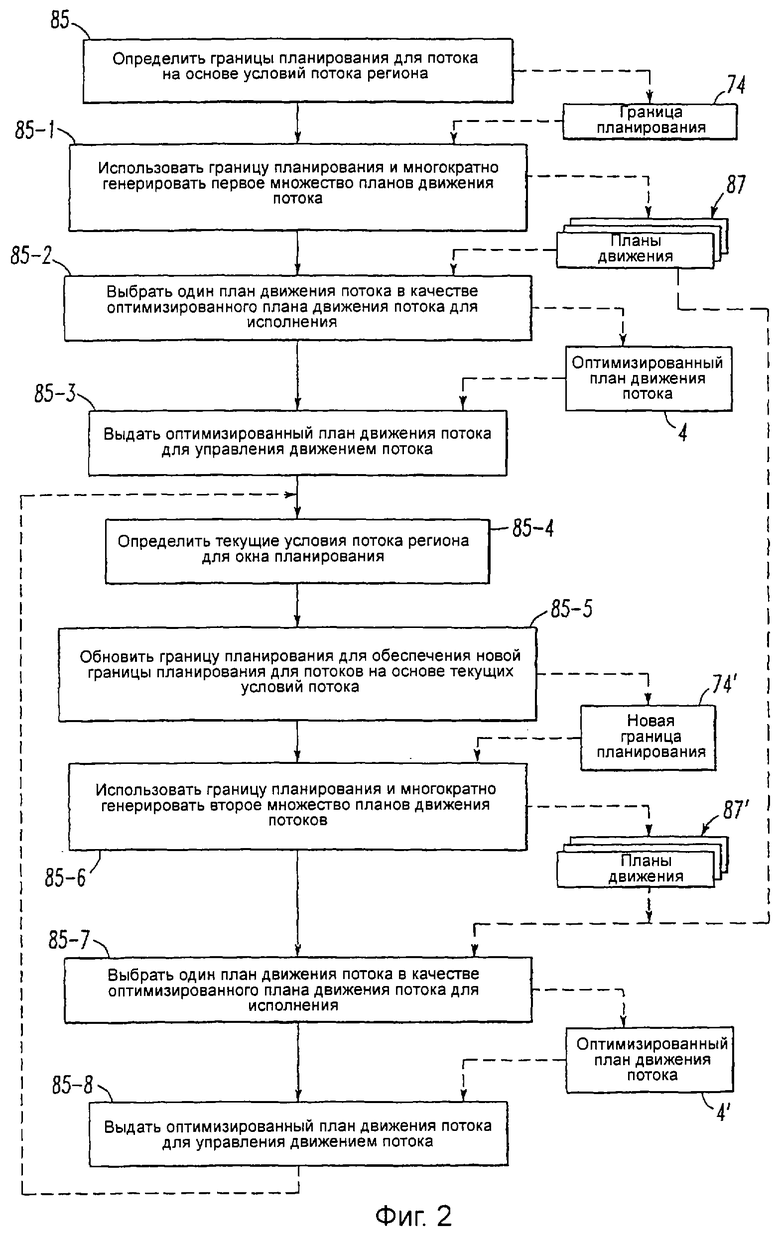
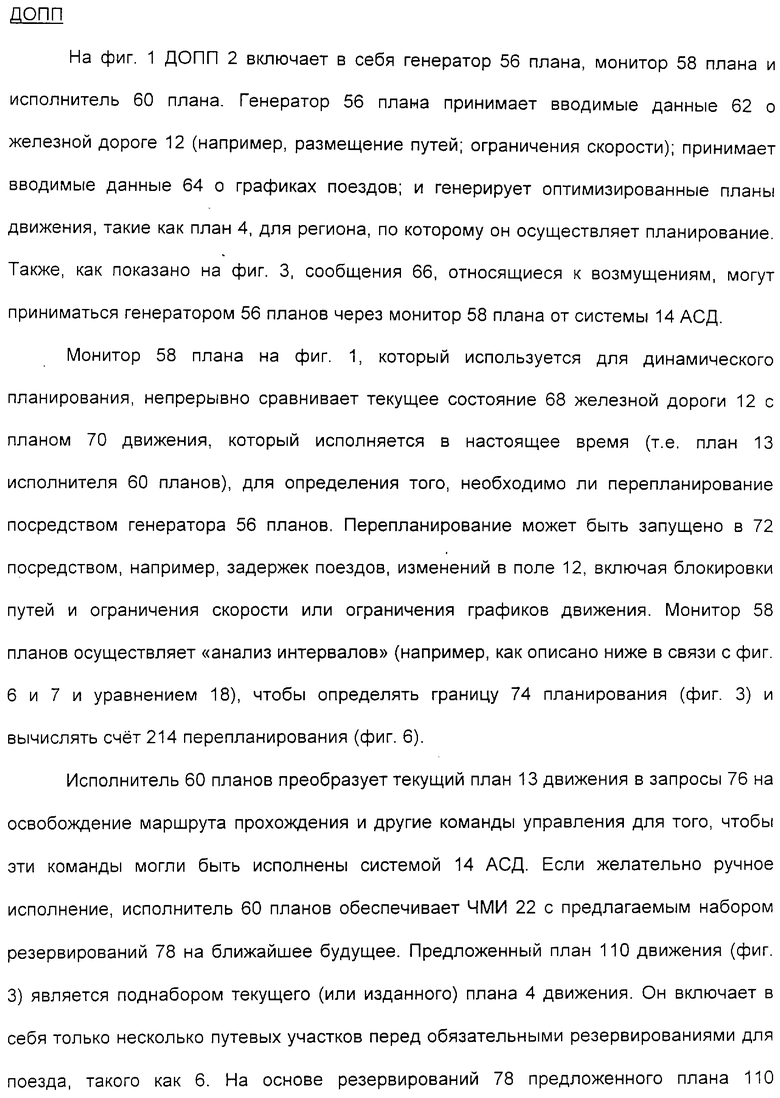
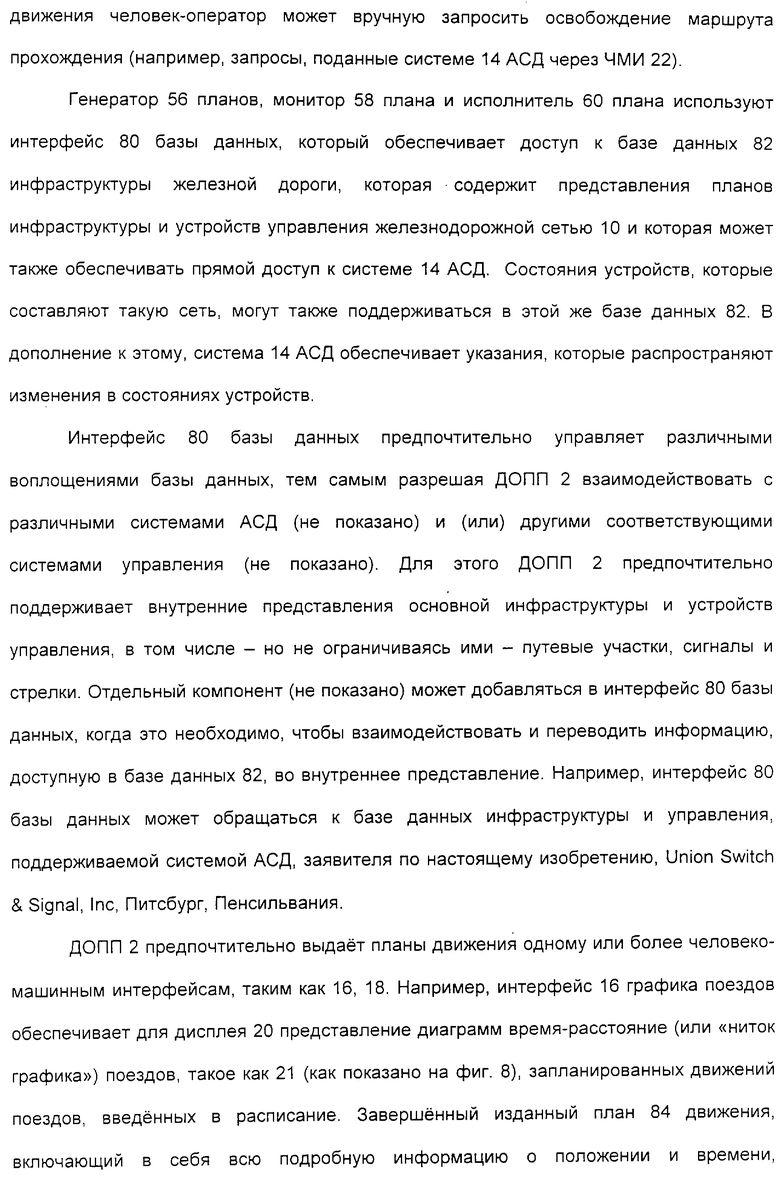
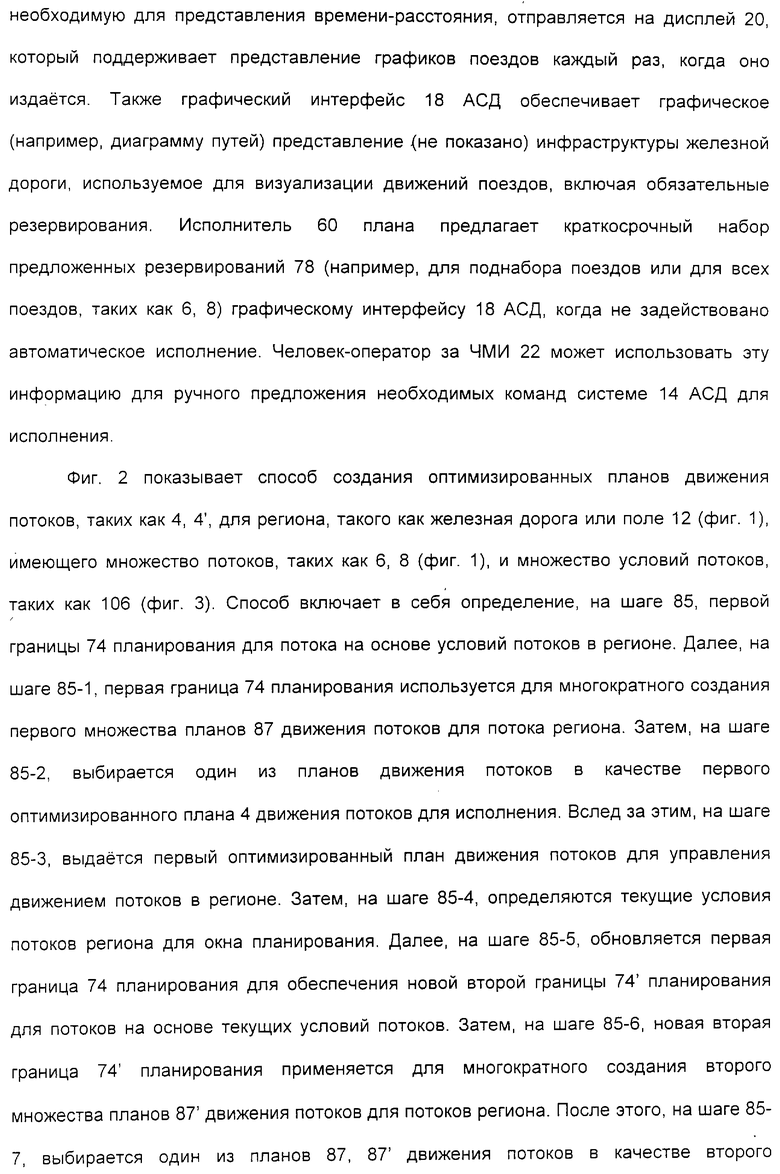
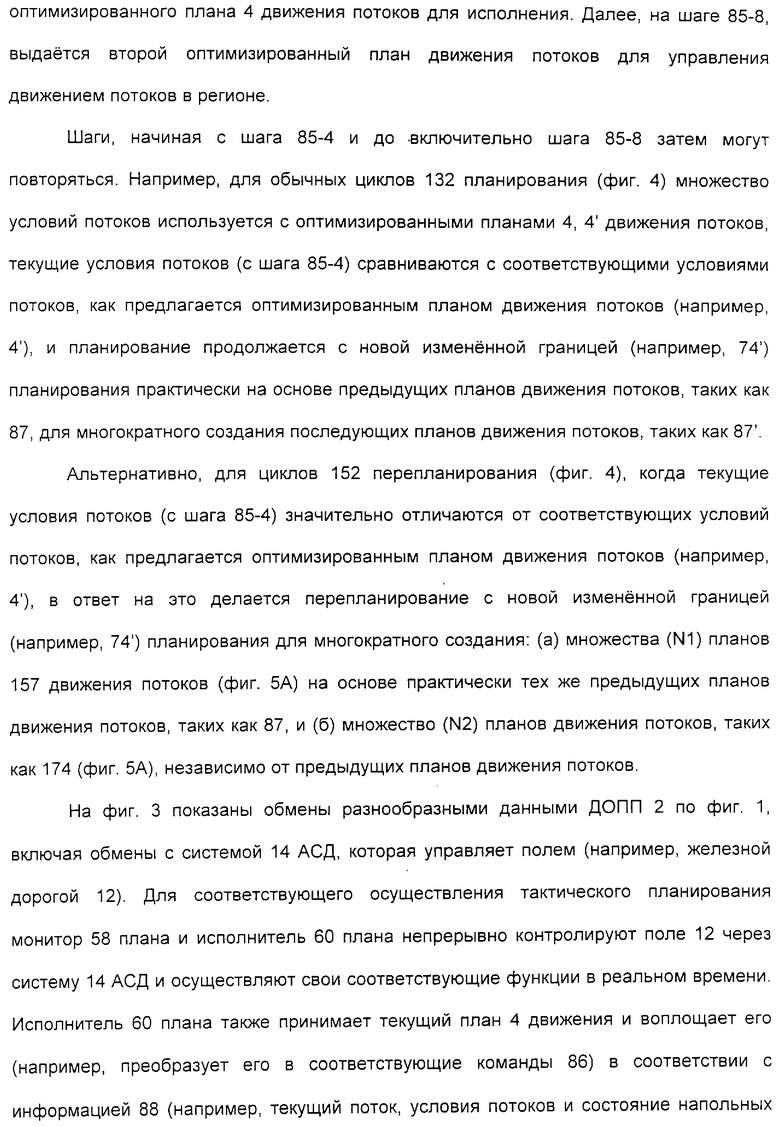
Изобретение относится к способам и системам создания и динамического изменения оптимизированных планов движения потоков. Техническим результатом является динамическая оптимизация движения в динамически изменяющейся окружающей среде. В способе монитор плана генерирует первую границу планирования для потока на основе условий потока региона. Генератор планов использует первую границу планирования и многократно генерирует первые планы движения потока для потока. Генератор планов выбирает один из первых планов движения потока в качестве первого оптимизированного плана движения потока и выдает его для управления движением потока. Монитор плана определяет текущие условия потока региона для окна планирования и обновляет первую границу планирования для обеспечения второй границы планирования для потока на основе текущих условий потока. Генератор планов использует вторую границу планирования и многократно генерирует вторые планы движения потока для потока, выбирает один из первого и второго планов движения потока в качестве второго оптимизированного плана движения потока и выдает его для управления движением потока. Система реализует данный способ. 3 н. и 27 з.п. ф-лы, 11 ил.
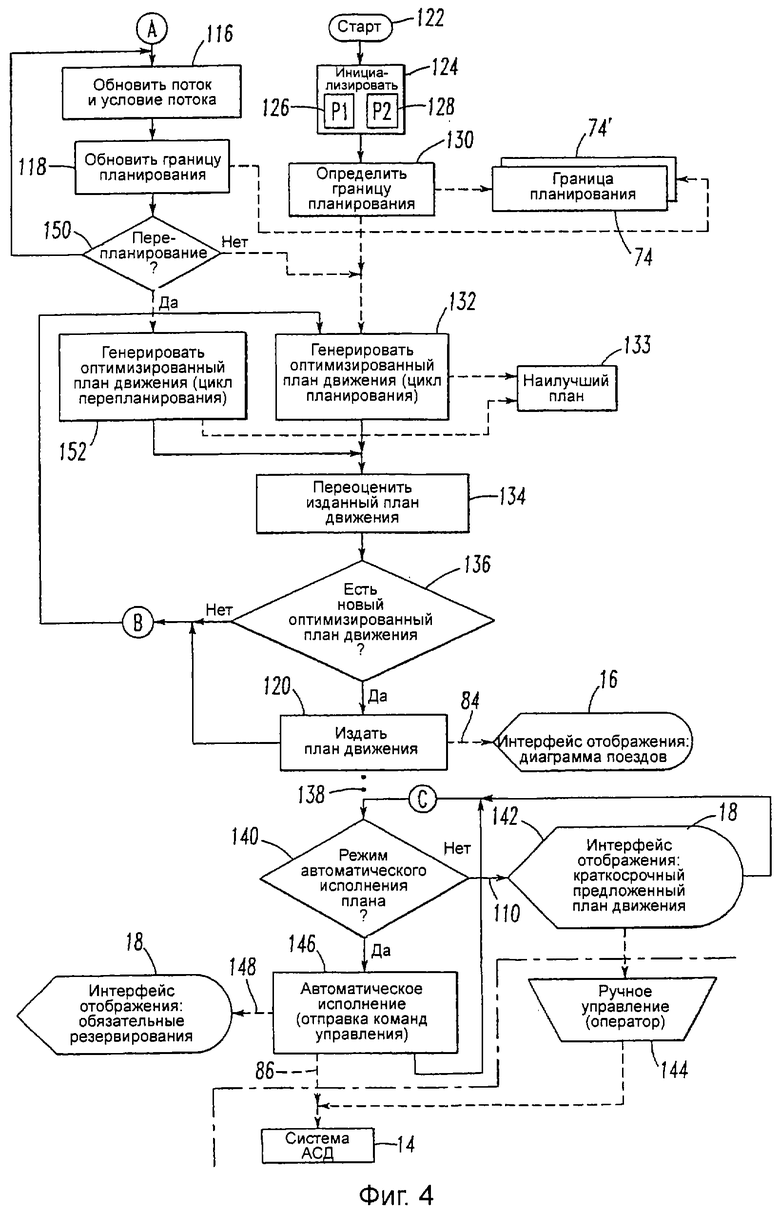
определяют первую границу планирования для упомянутого потока на основе условий потока упомянутого региона;
используют упомянутую первую границу планирования и многократно генерируют первое множество планов движения потока для потока упомянутого региона;
выбирают один из упомянутого первого множества планов движения потока в качестве первого оптимизированного плана движения потока для исполнения;
выдают указанный первый оптимизированный план движения потока для управления движением потока в упомянутом регионе;
определяют текущие условия потока упомянутого региона;
обновляют упомянутую первую границу планирования для обеспечения второй границы планирования для упомянутого потока на основе упомянутых текущих условий потока;
используют упомянутую вторую границу планирования и многократно генерируют второе множество планов движения потока для потока упомянутого региона;
выбирают один из упомянутых первого и второго множества планов движения потока в качестве второго оптимизированного плана движения потока для исполнения и
выдают упомянутый второй оптимизированный план движения потока для управления движением потока в упомянутом регионе.
используют первое множество условий потока для упомянутого первого оптимизированного плана движения потока и
сравнивают упомянутые текущие условия потока с первым множеством условий потока для упомянутого первого оптимизированного плана движения потока и продолжают планировать со второй границей планирования в принципе на основе упомянутого первого множества планов движения потока, чтобы многократно генерировать упомянутое второе множество планов движения потока для потока упомянутого региона.
используют первое множество условий потока для упомянутого первого оптимизированного плана движения потока и
сравнивают упомянутые текущие условия потока с первым множеством условий потока для упомянутого первого оптимизированного плана движения потока и в ответ на это перепланируют со второй границей планирования для многократного генерирования как упомянутого второго множества планов движения потока для потока упомянутого региона:
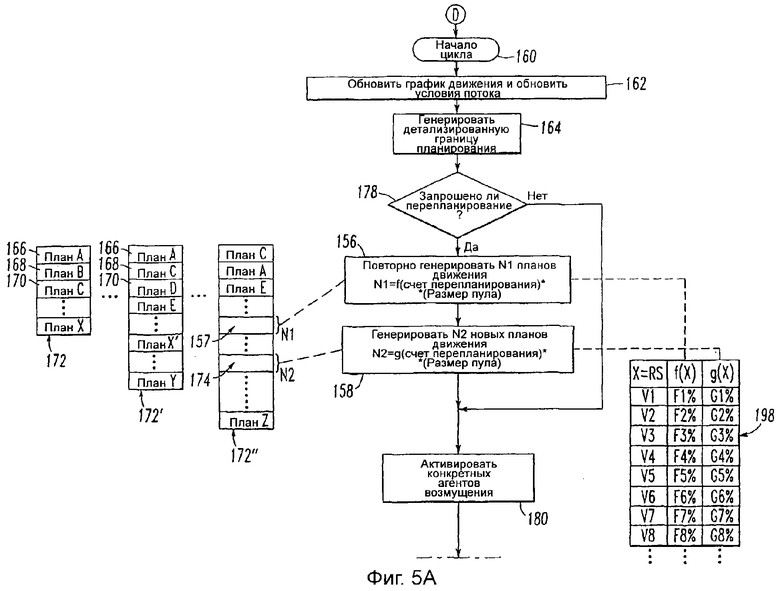
(а) третьего множества планов движения потока практически на основании некоторых из упомянутого первого множества планов движения потока для потока упомянутого региона и
(б) четвертого множества планов движения потока независимо от упомянутого первого множества планов движения потока для потока упомянутого региона.
связывают значение целевой функции с каждым из упомянутых первого и второго множество планов движения потока и
используют в качестве упомянутого продолжения планировать со второй границей планирования;
уничтожают, по меньшей мере, один из упомянутого первого множества планов движения потока на основе упомянутого значения целевой функции,
изменяют, по меньшей мере, один из указанного первого множества планов движения потока для улучшения значения его целевой функции,
используют множество из упомянутого первого множества планов движения потока для генерирования одного из упомянутого второго множества планов движения потока,
изменяют, по меньшей мере, один из упомянутого первого множества планов движения потока в ответ на, по меньшей мере, одно возмещение, связанное с упомянутыми текущими условиями потока, и
генерируют, по меньшей мере, один из упомянутого второго множества планов движения потока независимо от упомянутого первого множества планов движения потока.
определяют значения целевой функции для упомянутых первого и второго множества планов движения потока и
выбирают упомянутый один из упомянутых первого и второго множеств планов движения потока в качестве указанного второго оптимизированного плана движения потока на основе упомянутых значений целевой функции.
ранжируют упомянутые первое и второе множества планов движения потока на основе значений целевой функции и
выбирают упомянутый второй оптимизированный план движения потока для исполнения на основе упомянутого ранжирования.
продолжают упомянутое использование упомянутой первой границы планирования и многократное генерирование первого множества планов движения потока для потока упомянутого региона на заранее определенное время перед упомянутым выбором одного из упомянутого первого множества планов движения потока в качестве первого оптимизированного плана движения потока для исполнения.
связывают первый горизонт планирования с упомянутой первой границей планирования и более поздний второй горизонт планирования с упомянутой второй границей планирования;
вводят изменения графиков движения;
подгоняют, по меньшей мере, один из упомянутого первого множества планов движения потока к упомянутому второму горизонту планирования и упомянутым изменениям графика движения и
генерируют, по меньшей мере, один из упомянутого второго множества планов движения потока, используя упомянутый подогнанный, по меньшей мере, один из упомянутого первого множества планов движения потока.
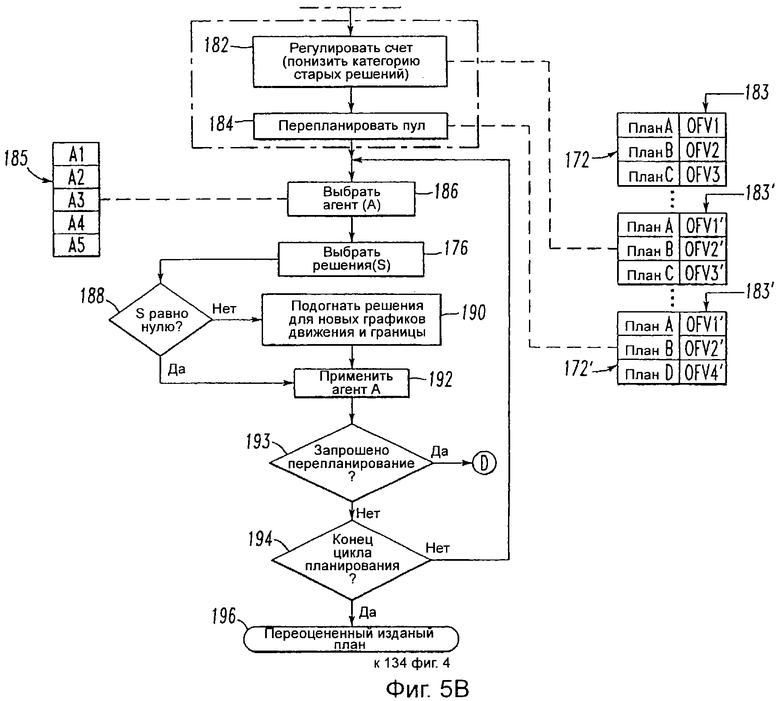
обеспечивают соответствующее значение целевой функции и соответствующий срок для каждого из упомянутых первого и второго множеств планов движения потока
и
понижают категорию соответствующего значения целевой функции в качестве функции соответствующего срока для каждого из упомянутого первого множества планов движения потока.
включают, по меньшей мере, некоторые из упомянутого первого множества планов движения потока и упомянутого второго множества планов движения потока в пул планов движения потока.
используют соответствующее значение целевой функции для каждого из планов движения потока в упомянутом пуле;
упорядочивают планы движения потока в упомянутом пуле на основе соответствующих значений целевой функции и
выбирают один из упомянутых планов движения потока в упомянутом пуле в качестве упомянутого второго оптимизированного плана движения потока для исполнения на основе упомянутого упорядочивания.
используют соответствующий срок для каждого из планов движения потока в упомянутом пуле;
понижают категорию соответствующего значения целевой функции соответствующего одного из упомянутых планов движения потока в упомянутом пуле в качестве функции соответствующего срока и
переупорядочивают упомянутый соответствующий один из упомянутых планов движения потока в упомянутом пуле в ответ на упомянутое понижение категории.
удаляют некоторые из упомянутого первого множества планов движения потока и некоторые из упомянутого второго множества планов движения потока из упомянутого пула для поддержания заранее заданного числа планов движения потока в упомянутом пуле.
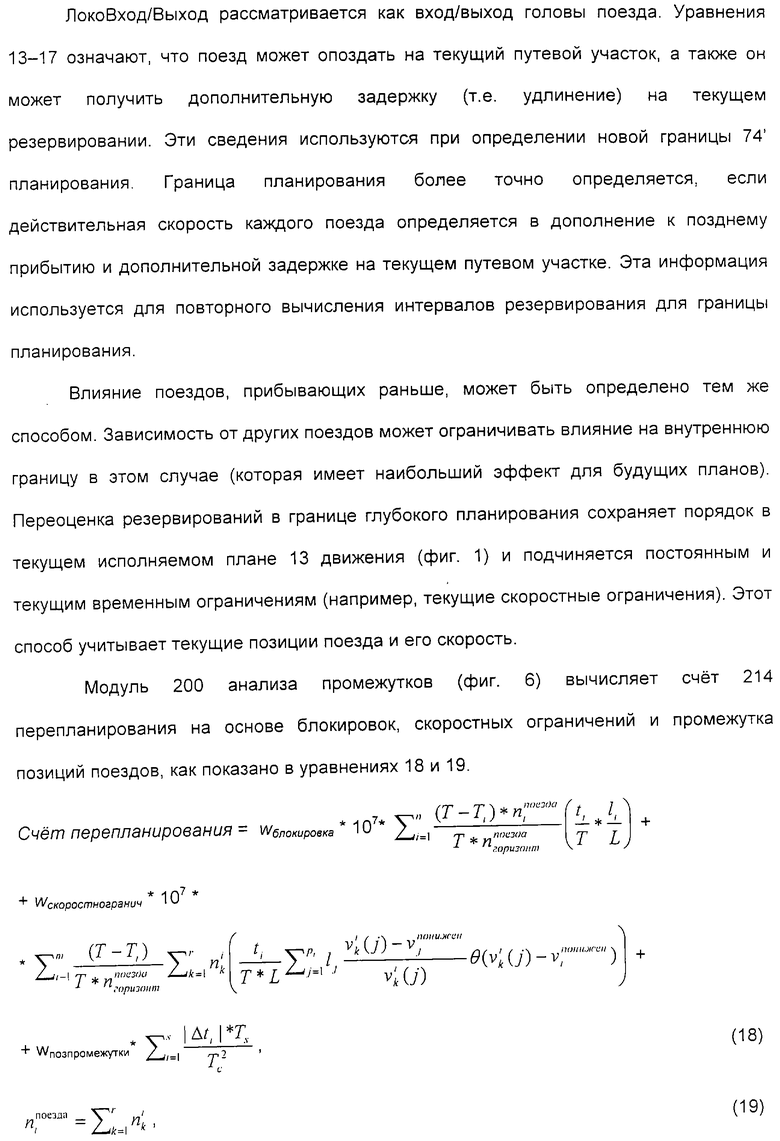
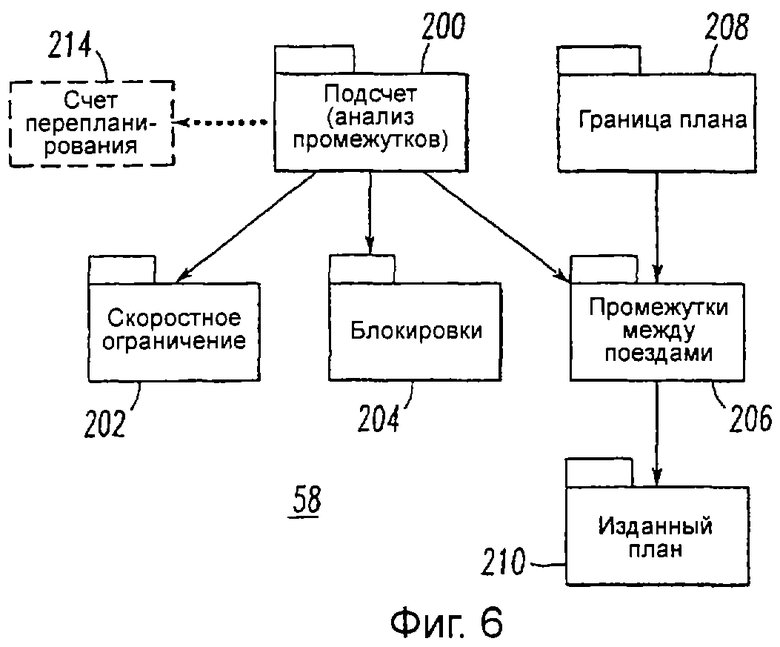
сравнивают упомянутые текущие условия потока с упомянутым первым множеством условия потока для упомянутого первого оптимизированного плана движения потока и определяют счет перепланирования и
используют упомянутое перепланирование, когда упомянутый счет перепланирования превышает заранее заданное значение.
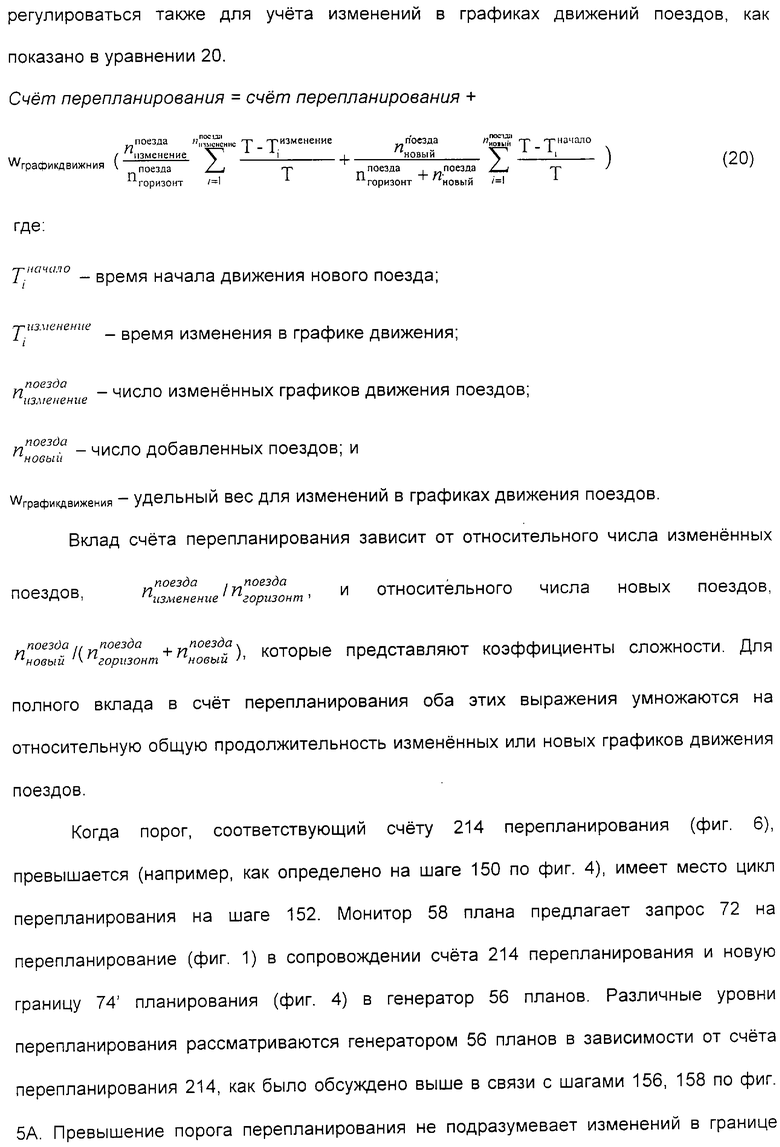
учитывают изменения графиков движения поездов и в ответ на это
определяют упомянутый счет перепланирования, включающий в себя упомянутые
изменения графиков движения поездов; и
используют упомянутое перепланирование, когда упомянутый счет
перепланирования, включающий в себя упомянутые изменения графиков движения поездов, превышает заранее заданное значение.
сравнивают упомянутые текущие условия потока с упомянутым первым множеством условий потока для упомянутого первого оптимизированного плана движения потока и определяют счет перепланирования;
используют множество типов упомянутых условий потока для упомянутого региона и
используют упомянутое перепланирование, когда счет перепланирования превышает заранее заданное значение или в ответ на изменения в, по меньшей мере, одном упомянутом типе упомянутых условий потока.
обеспечивают первое значение целевой функции для упомянутого первого оптимизированного плана движения потока на основе упомянутых текущих условий потока;
определяют наилучший план из одного из упомянутых первого и второго множеств планов движения потока;
обеспечивают второе значение целевой функции для упомянутого наилучшего плана на основе упомянутых текущих условий потока и
сравнивают указанное первое значение целевой функции с упомянутым вторым значением целевой функции для определения того, заменить ли упомянутый первый оптимизированный план движения потока упомянутым наилучшим планом.
определяют, что упомянутое второе значение целевой функции меньше, чем упомянутое первое значение целевой функции на заранее заданную величину, и в ответ на это заменяют упомянутый первый оптимизированный план движения потока на упомянутый наилучший план.
обеспечивают соответствующее значение целевой функции и соответствующий срок для каждого из упомянутых первого и второго множеств планов движения потока;
понижают категорию соответствующего значения целевой функции как функции, соответствующей сроку для каждого из упомянутого первого множества планов движения потока; и
определяют упомянутый наилучший план на основе соответствующего значения целевой функции с пониженной категорией для каждого из упомянутого первого множества планов движения потока и соответствующего значения целевой функции для каждого из упомянутого второго множества планов движения потока и
сравнивают упомянутое первое значение целевой функции со значением целевой функции упомянутого наилучшего плана для определения того, заменить ли упомянутый первый оптимизированный план движения потока упомянутым наилучшим планом.
сравнивают упомянутые текущие условия потока с первым множеством условий потока для упомянутого первого оптимизированного плана движения потока и определяют счет перепланирования;
определяют, что счет перепланирования превысил заранее заданное значение, и в ответ на это используют упомянутые текущие условия потока для генерирования упомянутого второго множества планов движения потока;
обеспечение первого значения целевой функции для упомянутого первого оптимизированного плана движения потока на основе упомянутых текущих условий потока;
определяют наилучший план для одного из упомянутых первого и второго множеств планов движения потока;
обеспечивают второе значение целевой функции для упомянутого наилучшего плана на основе текущих условий потока и
сравнивают упомянутое первое значение целевой функции с упомянутым вторым значением целевой функции для определения того, заменить ли упомянутый первый оптимизированный план движения потока упомянутым наилучшим планом.
используют множество типов упомянутых условий потока для упомянутого региона;
определяют изменения в, по меньшей мере, одном из упомянутых типов упомянутых условий потока для упомянутого региона в упомянутых текущих условиях потока и в ответ на это используют упомянутые текущие условия потока для генерирования упомянутого второго множества планов движения потока;
обеспечивают первое значение целевой функции для упомянутого первого оптимизированного плана движения потока на основе упомянутых текущих условий потока;
определяют наилучший план из одного из упомянутых первого и второго множеств планов движения потока;
обеспечивают второе значение целевой функции для упомянутого наилучшего плана на основе текущих условий потока и
сравнивают упомянутое первое значение целевой функции с упомянутым вторым значением целевой функции для определения того, заменить ли упомянутый первый оптимизированный план движения потока упомянутым наилучшим планом.
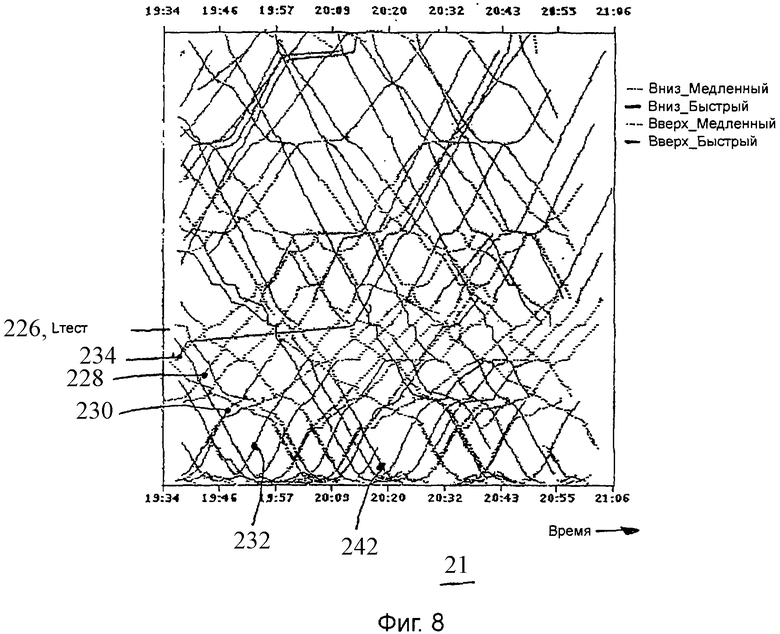
генерируют упомянутое первое множество планов движения потока для множества поездов в железнодорожной сети в упомянутом регионе;
динамически оптимизируют движение упомянутых поездов по упомянутой железнодорожной сети при изменениях условий потока в упомянутой железнодорожной сети;
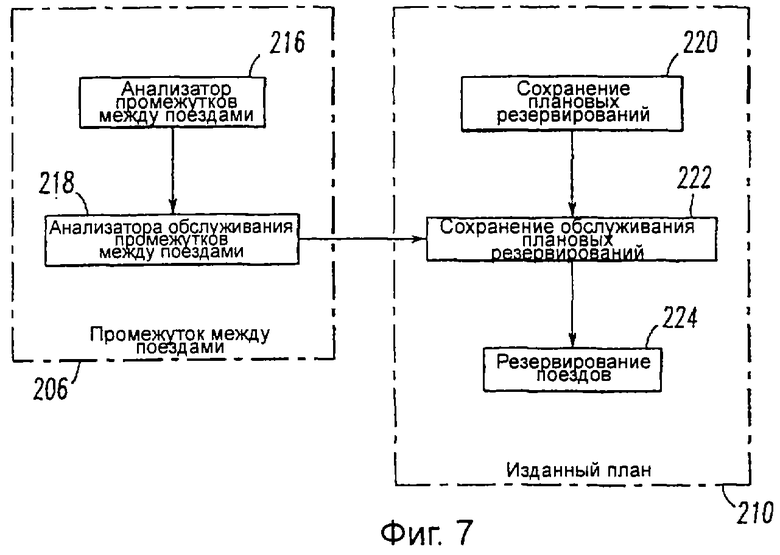
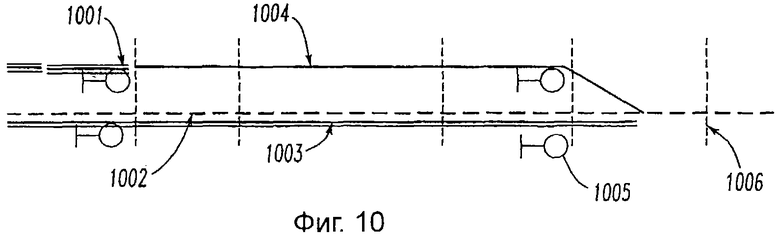
используют множество путевых участков в упомянутой железнодорожной сети;
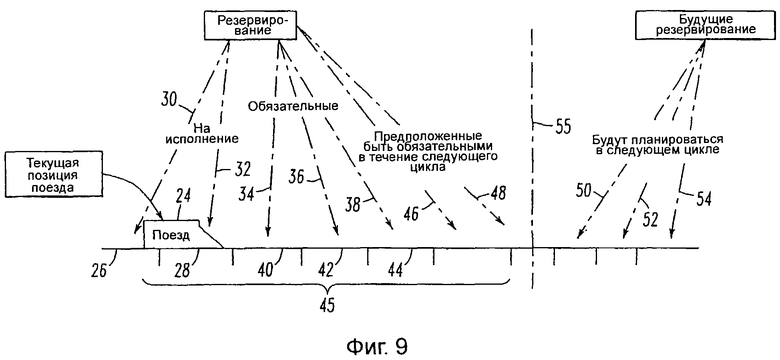
используют множество резервирований, при этом каждое из упомянутых резервирований представляет запланированное использование одного из упомянутых участков одним из упомянутых поездов с даты/времени входа до даты/времени выхода; и
объединяют упомянутые резервирования для генерирования одного из упомянутых первого и второго множеств планов движений потока.
средство для ввода информации, представляющей упомянутые условия потока;
и
средство для исполнения множества подпрограмм, при этом упомянутые подпрограммы содержат
монитор плана, определяющий первую границу планирования для упомянутого потока на основе условий потока упомянутого региона, определяющий текущие условия потока упомянутого региона и обновляющий упомянутую первую границу планирования для обеспечения второй границы планирования для упомянутого потока на основе упомянутых текущих условий потока;
генератор планов, последовательно использующий упомянутую первую границу планирования и упомянутую вторую границу планирования и многократно генерирующий первое множество планов движения потока и второе множество планов движения потока соответственно для потоков упомянутого региона, выбирающий один из упомянутых первого множеств планов движения потока в качестве первого оптимизированного плана движения для исполнения, выбирающий один из упомянутых первого и второго множеств планов движения потока в качестве второго оптимизированного плана движения потока для исполнения и последовательно выдающий упомянутые первый и второй оптимизированные планы движения потока, и
исполнитель плана, последовательно преобразующий упомянутые первый и второй оптимизированные планы движения потока во множество команд для управления движением потоков в упомянутом регионе.
средство для ввода информации, представляющей упомянутые условия потока;
средство для исполнения множества подпрограмм, при этом упомянутые подпрограммы содержат
монитор плана, определяющий первую границу планирования для упомянутого потока на основе условий потока упомянутого региона, определяющий текущие условия потока упомянутого региона и обновляющий упомянутую первую границу планирования для обеспечения второй границы планирования для упомянутого потока на основе упомянутых текущих условий потока,
генератор планов, последовательно использующий упомянутую первую границу планирования и упомянутую вторую границу планирования и многократно генерирующий первое множество планов движения потока и второе множество планов движения потока соответственно для потоков упомянутого региона, выбирающий один из упомянутого первого множества планов движения потока в качестве первого оптимизированного плана движения потока для исполнения, выбирающий один из упомянутых первого и второго множеств планов движения потока в качестве второго оптимизированного плана движения потока для исполнения и последовательно выдающий упомянутые первый и второй оптимизированные планы движения потока, и
исполнитель плана, последовательно преобразующий упомянутые первый и второй оптимизированные планы движения потока во множество команд для управления движением потока в упомянутом регионе; и
средство для исполнения упомянутых команд для управления движением потоков в упомянутом регионе.
| RU 2181328 С1, 20.04.2002 | |||
| УСТРОЙСТВО ТРАНСПОРТНОЙ СИСТЕМЫ И СПОСОБ РЕГУЛИРОВАНИЯ ТРАНСПОРТНО-ПАССАЖИРСКИХ ПОТОКОВ МЕГАПОЛИСА | 1995 |
|
RU2104363C1 |
| US 6459964 A, 01.10.2002 | |||
| US 6304801 A, 16.10.2001. | |||

