Данная заявка является частичным продолжением заявки (США) номер 11/385354, поданной 20 марта 2006 года, содержимое которой полностью содержится в данном документе по ссылке, и основана на Предварительной заявке номер 60/869196, поданной 8 декабря 2006 года.
Область техники, к которой относится изобретение
Область техники изобретения относится к системе и способу оптимизации движения железнодорожного состава, а более конкретно к системе и способу пополнения и обновления базы данных железнодорожных составов/путей, связанной с системой, способом и компьютерным программным кодом для оптимизации движения железнодорожного состава.
Уровень техники
Локомотив - это комплексная система с множеством подсистем, причем каждая подсистема взаимозависит от других подсистем. Оператор на борту локомотива применяет тяговое и тормозное усилие, чтобы управлять скоростью локомотива и его нагрузкой от вагонов, чтобы обеспечить безопасное и своевременное прибытие в требуемый пункт назначения. Чтобы выполнить эту функцию и соответствовать заранее заданным рабочим скоростям, которые могут варьироваться с расположением железнодорожного состава на железнодорожном пути, оператор, как правило, должен иметь большой опыт в управлении железнодорожным составом на указанной территории с различными железнодорожными составами, т.е. с различными типами и числом вагонов.
Тем не менее, даже при достаточных знаниях и опыте для того чтобы обеспечить безопасную работу, оператор, как правило, не может управлять локомотивом так, чтобы минимизировать потребление топлива (или другие эксплуатационные характеристики, к примеру, выбросы) в ходе рейса. Множество рабочих факторов влияют на потребление топлива, в том числе, например, предельно допустимые выбросы, характеристики потребления топлива/выбросов локомотива, размер и загрузка вагонов, погода, условия движения и рабочие параметры локомотива. Оператор может более эффективно и рационально управлять железнодорожным составом (посредством применения тяговых и тормозных усилий), если предоставлена управляющая информация, которая оптимизирует функционирование в ходе рейса, при этом удовлетворяя требуемому расписанию (времени прибытия) и используя минимальное количество топлива (или оптимизируя другой рабочий параметр), несмотря на множество переменных, которые влияют на эффективность. Таким образом, оператору желательно управлять железнодорожным составом под руководством (или управлением) системы и процесса, который уведомляет о применении тяговых и тормозных усилий, чтобы оптимизировать один или более рабочих параметров.
Раскрытие изобретения
Примерные варианты осуществления изобретения раскрывают систему, способ и компьютерный программный код для пополнения и обновления базы данных железнодорожных составов/путей, связанной с системой, способом и/или компьютерным программным кодом для оптимизации движения железнодорожного состава. С этой целью раскрывается система для предоставления информации по железнодорожному составу и/или информация характеризации железнодорожного пути для использования при функционировании железнодорожного состава. Система включает в себя первый элемент для того, чтобы определять по меньшей мере одно из местоположения железнодорожного состава в сегменте железнодорожного пути и времени с начала рейса. Дополнительно раскрывается элемент характеризации железнодорожного пути, чтобы предоставлять информацию по сегментам железнодорожного пути. Дополнительно раскрыты датчик для измерения рабочего состояния по меньшей мере одного из локомотивов железнодорожного состава и база данных для хранения информации по сегментам железнодорожного пути и/или рабочего состояния по меньшей мере одного из локомотивов. Раскрыт процессор для того, чтобы коррелировать информацию от первого элемента, элемента характеризации железнодорожного пути, датчика и базы данных с тем, чтобы база данных могла быть использована для создания плана рейса, который оптимизирует функционирование железнодорожного состава в соответствии с одним или более рабочими критериями для железнодорожного состава.
В другом примерном варианте осуществления раскрыта система для управления железнодорожным составом в ходе рейса по сегменту железнодорожного пути, при этом железнодорожный состав содержит один или более локомотивных составов, причем каждый локомотивный состав содержит один или более локомотивов. Система включает в себя первый элемент для того, чтобы определять местоположение железнодорожного состава на сегменте железнодорожного пути и/или время с начала рейса. Также раскрыты элемент характеризации железнодорожного пути, чтобы предоставлять информацию по сегментам железнодорожного пути, и датчик для измерения рабочего состояния по меньшей мере одного из локомотивов. Раскрыта база данных для хранения информации по сегментам железнодорожного пути и/или рабочего состояния по меньшей мере одного из локомотивов. Также раскрыт процессор, который имеет такую функциональность, чтобы принимать информацию от первого элемента, датчика, элемента характеризации железнодорожного пути и/или базы данных для создания плана рейса, который оптимизирует функционирование локомотива в соответствии с одним или более рабочими критериями железнодорожного состава.
В еще одном другом примерном варианте осуществления раскрыт способ управления железнодорожным составом в ходе рейса по сегменту железнодорожного пути, при этом железнодорожный состав содержит один или более локомотивных составов, причем каждый локомотивный состав содержит один или более локомотивов. Способ включает в себя этап определения местоположения железнодорожного состава на железнодорожном пути или времени с начала рейса и этап определения информации по сегментам железнодорожного пути. Два других этапа включают в себя сохранение информации по сегментам железнодорожного пути и определение по меньшей мере одного рабочего условия по меньшей мере одного из локомотивов. Другой этап предоставляет создание плана рейса в ответ по меньшей мере на одно из местоположения железнодорожного состава, информации по сегментам железнодорожного пути и по меньшей мере одного рабочего состояния, чтобы оптимизировать функционирование локомотива в соответствии с одним или более рабочими критериями для железнодорожного состава.
Другой примерный вариант осуществления раскрывает компьютерный программный код для управления железнодорожным составом, имеющим компьютерный процессор, причем код служит для управления железнодорожным составом в ходе рейса по сегменту железнодорожного пути, при этом железнодорожный состав включает в себя один или более локомотивных составов, причем каждый локомотивный состав включает в себя один или более локомотивов. Программный код включает в себя программный модуль для определения информации по сегментам железнодорожного пути и программный модуль для сохранения информации по сегментам железнодорожного пути. Также предусмотрен программный модуль для определения по меньшей мере одного рабочего состояния одного из локомотивов. Программный код также включает в себя программный модуль для создания плана рейса в ответ по меньшей мере на одно из местоположения железнодорожного состава, информации по сегментам железнодорожного пути и по меньшей мере одного рабочего состояния, чтобы оптимизировать функционирование локомотива в соответствии с одним или более рабочими критериями для железнодорожного состава.
Краткое описание чертежей
Более подробное описание изобретения, вкратце поясненного ниже, предоставляется посредством ссылки на его конкретные варианты осуществления, которые проиллюстрированы на прилагаемых чертежах. При условии того, что эти чертежи изображают только типичные варианты осуществления изобретения и поэтому не должны рассматриваться как ограничивающие его объем, изобретение описывается и поясняется с помощью дополнительной специфики и подробностей посредством использования прилагаемых чертежей, на которых:
Фиг.1 иллюстрирует примерную иллюстрацию блок-схемы последовательности операций способа оптимизации рейса;
Фиг.2 иллюстрирует упрощенную модель железнодорожного состава, которая может быть использована;
Фиг.3 иллюстрирует примерный вариант осуществления элементов системы оптимизации рейса;
Фиг.4 иллюстрирует примерный вариант осуществления кривой расхода топлива/времени движения;
Фиг.5 иллюстрирует примерный вариант осуществления сегментационного разложения для планирования рейса;
Фиг.6 иллюстрирует примерный вариант осуществления примера сегментации;
Фиг.7 иллюстрирует примерную блок-схему последовательности операций способа оптимизации рейса;
Фиг.8 иллюстрирует примерную иллюстрацию динамического дисплея для использования оператором;
Фиг.9 иллюстрирует другую примерную иллюстрацию динамического дисплея для использования оператором;
Фиг.10 иллюстрирует другую примерную иллюстрацию динамического дисплея для использования оператором;
Фиг.11 иллюстрирует характеристики базы данных железнодорожных путей и
Фиг.12 иллюстрирует блок-схему последовательности операций примерных этапов управления железнодорожным составом в ходе рейса по сегменту железнодорожного пути.
Осуществление изобретения
Далее приводится подробное описание вариантов осуществления, совместимых с изобретением, примеры которых проиллюстрированы на прилагаемых чертежах. Где бы то ни было, одни и те же номера ссылок, используемые на чертежах, ссылаются на одни и те же или аналогичные элементы.
Примерный вариант осуществления, раскрытый в данном документе, согласно настоящему изобретению разрешает проблемы в данной области техники посредством предоставления системы, способа и машинореализованного способа определения и реализации стратегии управления железнодорожным составом, имеющим локомотивный состав (т.е. множество непосредственно сцепленных локомотивов или один или более локомотивных составов, распределенных в железнодорожном составе), чтобы отслеживать и управлять движением железнодорожного состава, чтобы улучшать конкретные объективные параметрические требования к рабочим критериям, при этом удовлетворяя ограничениям расписания и скорости. Примеры изобретения также применимы к железнодорожному составу с распределенным приводом, т.е. к железнодорожному составу, имеющему один или более локомотивных составов, разнесенных от ведущего локомотива и управляемых оператором ведущего локомотива.
Специалисты в данной области техники должны признавать, что устройство, такое как система обработки данных, включающая в себя ЦП, запоминающее устройство, механизмы ввода-вывода, устройство хранения программ, соединительную шину и другие соответствующие компоненты, может быть запрограммировано или иным образом запроектировано так, чтобы упрощать практическое применение способа изобретения. Эта система должна включать в себя соответствующее программное средство для приведения в исполнение способа изобретения.
В другом варианте осуществления изделие, такое как заранее записанный диск или другой аналогичный компьютерный программный продукт, для использования с системой обработки данных включает в себя носитель хранения и программу, записанную на него, для направления системы обработки данных для того, чтобы упрощать практическое применение способа изобретения. Эти устройства и изделия также попадают в рамки сущности и объема изобретения.
Вообще говоря, технический эффект заключается в определении реализации стратегии управления железнодорожным составом, чтобы улучшить целевые рабочие параметры при удовлетворении ограничений расписания и скорости, причем база данных железнодорожных составов/железнодорожных путей пополняется информацией о железнодорожном составе (обычно локомотивах) и железнодорожном пути. Чтобы упростить понимание примеров настоящего изобретения, оно описывается далее со ссылкой на его конкретные реализации.
Примерные варианты осуществления изобретения описываются в общем контексте машиноисполняемых команд, таких как программные модули, приводимых в исполнение посредством компьютера.
Программные модули, в общем, включают в себя процедуры, программы, объекты, компоненты, структуры данных и т.д., которые выполняют отдельные задачи или реализуют отдельные абстрактные типы данных. Например, программные приложения, которые лежат в основе типичных примеров изобретения, могут быть закодированы на различных языках для использования на различных платформах обработки. В нижеследующем описании примеры изобретения поясняются в контексте веб-портала, который использует веб-броузер. Тем не менее, следует принимать во внимание, что принципы, лежащие в основе примерных вариантов осуществления изобретения, могут быть использованы также с другими типами технологий компьютерных программ.
Более того, специалистам в данной области техники следует принимать во внимание, что примеры изобретения могут быть реализованы на практике с другими конфигурациями компьютерных систем, включая "карманные" устройства, многопроцессорные системы, основанную на микропроцессорах или программируемую бытовую электронную аппаратуру, мини-компьютеры, мейнфреймы и т.п. Примерные варианты осуществления изобретения могут быть реализованы на практике в распределенных вычислительных окружениях, в которых задачи выполняются удаленными обрабатывающими устройствами, которые связаны через сеть связи. В распределенном вычислительном окружении программные модули могут быть размещены в носителях хранения и локального, и удаленного компьютера, включающих в себя запоминающие устройства хранения. Эти локальные и удаленные вычислительные окружения могут полностью находиться в локомотиве или в соседних локомотивах в составе, или не на борту в придорожных, либо центральных офисах, в которых между вычислительными окружениями предусмотрены средства беспроводной связи.
Термин "локомотивный состав" состоит из одного или более размещенных друг с другом локомотивов, сцепленных вместе без вагонов между локомотивами так, чтобы предоставлять возможность движения и/или торможения. Железнодорожный состав может включать в себя один или более локомотивных составов. В частности, может быть один ведущий состав и один или более удаленных составов, например, первый удаленный состав в середине линии вагонов и другой удаленный состав в конце расположения железнодорожного состава. Каждый локомотивный состав имеет первый или ведущий локомотив и один или более замыкающих локомотивов. Хотя первый локомотив обычно считается ведущим локомотивом, специалисты в данной области техники должны легко признавать, что первый локомотив в составе из нескольких локомотивов может быть физически размещен в замыкающей позиции. Кроме того, хотя состав обычно рассматривается как сцепленные, размещенные друг за другом локомотивы, специалисты в данной области техники должны легко признавать то, что группа локомотивов также может быть распознана как состав даже, по меньшей мере, при одном вагоне, разделяющем локомотивы, например, когда состав сконфигурирован для распределенного управления мощностью, при этом команды регулировки подачи топлива и торможения передаются с ведущего локомотива в удаленные задние части посредством линии радиосвязи или физического кабеля. С этой целью термин локомотивный состав не должен считаться ограничивающим фактором при описании нескольких локомотивов в одном железнодорожном составе.
Ссылаясь теперь на чертежи, описываются варианты осуществления настоящего изобретения. Примерный вариант осуществления изобретения может быть реализован множеством способов, в том числе как система (включая систему компьютерной обработки), способ (включая компьютеризированный способ), устройство, машиночитаемый носитель, компьютерный программный продукт, графический пользовательский интерфейс, включающий в себя веб-портал, или структура данных, материально размещенная в машиночитаемом запоминающем устройстве. Некоторые варианты осуществления типичных примеров изобретения поясняются ниже.
Фиг.1 показывает иллюстрацию примерной блок-схемы последовательности операций способа оптимизации рейса. Как проиллюстрировано, вводятся команды, конкретные для планирования рейса, либо на борту, либо из удаленного места, такого как диспетчерский центр 10. Эта входная информация включает в себя, но не только, местоположение железнодорожного состава, структуру состава (такую как модели локомотивов), рабочие характеристики тяговой мощности локомотива для тяговой трансмиссии локомотива, потребление моторного топлива как функция от выходной мощности, характеристики охлаждения, заданный маршрут рейса (фактический уклон и кривизна железнодорожного пути как функция столбов с указанием числа миль либо компонент "фактического уклона", чтобы отражать кривизну, соответствующую стандартной железнодорожной практике), состав и загрузку вагонов (включая фактические коэффициенты лобового сопротивления), требуемые параметры рейса, в том числе, но не только, время и место начала, место окончания, время движения, идентификацию экипажа (пользователя и/или оператора), время смены экипажа и маршрут рейса.
Эти данные могут предоставляться в локомотив 42 согласно различным методикам и процессам, таким как, но не только, ручной ввод оператором в локомотиве 42 посредством бортового дисплея, связывание с устройством хранения данных, таким как плата жесткого диска, жесткий диск и/или USB-диск, либо передача информации посредством канала беспроводной связи из центрального или придорожного участка 41, например, посредством устройства передачи путевых сигналов и/или придорожного устройства в локомотив 42. Характеристики загрузок локомотива 42 и железнодорожного состава 31 (к примеру, сопротивление) также могут изменяться вдоль маршрута (к примеру, с высотой над уровнем моря, температурой окружающей среды и состоянием железнодорожных путей и вагонов), вызывая обновление плана с тем, чтобы отражать эти изменения согласно любому из способов, описанных выше. Обновленные данные, которые отражают процесс оптимизации рейса, могут предоставляться посредством любого из способов и методик, описанных выше, и/или посредством автономного сбора в реальном времени состояний локомотивов/железнодорожного состава. Эти обновления включают в себя, например, изменения характеристик локомотива или железнодорожного состава, обнаруженные посредством оборудования мониторинга на борту или не на борту локомотива(ов) 42.
Система путевых сигналов указывает конкретные условия на железнодорожном пути и предоставляет команды оператору железнодорожного состава, приближающегося к сигналу. Система передачи сигналов, которая подробнее описывается ниже, указывает, к примеру, допустимую скорость железнодорожного состава по сегменту железнодорожного пути и предоставляет команды остановки и запуска оператору железнодорожного состава. Подробности сигнальной системы, в том числе местоположение сигналов и правила, ассоциативно связанные с различными сигналами, сохраняются в бортовой базе данных 63.
На основе данных спецификаций, вводимых в настоящий примерный вариант осуществления изобретения, оптимальный план рейса, который минимизирует расход топлива и/или производимые выбросы, в соответствии с ограничениями предела скорости и требуемым временем начала и окончания, вычисляются с тем, чтобы сформировать профиль 12 рейса. Профиль содержит параметры оптимальной скорости и мощности (положения контроллера управления), которым следует железнодорожный состав, выражаемые как функция от расстояния и/или времени с начала рейса, рабочие пределы железнодорожного состава, в том числе, но не только, настройки максимальной мощности, задаваемой положением контроллера, и торможения, пределы скорости как функция от местоположения и ожидаемого потребляемого топлива и произведенных выбросов. В примерном варианте осуществления значение установки положения контроллера управления выбирается так, чтобы получать решения об изменении управления дросселем примерно каждые 10-30 секунд.
Специалисты в данной области техники должны признавать, что решения об изменении управления дросселем могут приниматься с более короткими или длинными интервалами, если требуется и/или желательно следовать оптимальному профилю скорости. В более широком смысле специалистам в данной области техники должно быть очевидно, что профили предоставляют настройки мощности железнодорожного состава на уровне железнодорожного состава, на уровне локомотивного состава и/или на уровне отдельного локомотива. При использовании в данном документе мощность содержит мощность торможения, мощность движения и мощность пневматического торможения. В другом предпочтительном варианте осуществления вместо управления с традиционными дискретными установками мощности, задаваемой положением контроллера, пример настоящего изобретения определяет установку требуемой мощности из непрерывного диапазона установок мощности, чтобы оптимизировать профиль скорости. Таким образом, если оптимальный профиль задает, например, установку положения контроллера управления в 6,8 вместо установки положения контроллера управления в 7, локомотив 42 функционирует при 6,8. Предоставление таких промежуточных установок мощности позволяет обеспечивать дополнительные преимущества по эффективности, как описано ниже.
Процедура вычисления оптимального профиля может включать в себя множество способов для вычисления последовательности мощности, которая приводит железнодорожный состав 31, чтобы минимизировать топливо и/или выбросы с учетом ограничений по функционированию локомотива и расписанию, как обобщено ниже. В некоторых случаях оптимальный профиль может быть в достаточной степени аналогичен предварительно определенному профилю вследствие похожести конфигураций железнодорожного состава, маршрута и условий окружающей среды. В этих случаях может быть достаточным извлечь предварительно определенную траекторию движения из базы данных 63 и управлять железнодорожным составом соответствующим образом.
Когда предыдущий план недоступен, способы для того чтобы вычислять новый план, включают в себя, но не только, непосредственное вычисление оптимального профиля с помощью моделей дифференциальных уравнений, которые аппроксимируют физику движения железнодорожного состава. Согласно этому процессу определяется количественная целевая функция; в общем, функция содержит взвешенную сумму (интеграл) переменных модели, которые соответствуют скорости расхода топлива и формируемым выбросам, плюс член, для того чтобы штрафовать чрезмерные изменения при управлении дросселем.
Оптимальное формулирование управления устанавливается так, чтобы минимизировать количественную целевую функцию с учетом ограничений, включающих в себя, но не только, пределы скорости, установки минимальной и максимальной мощности (управления дросселем) и максимальные накопленные и мгновенные выбросы. В зависимости от целей планирования в любое время проблема может быть установлена так, чтобы минимизировать потребление топлива с учетом ограничений на выбросы и пределов скорости либо минимизировать выбросы с учетом ограничений на потребление топлива и время прибытия. Также можно установить цель, чтобы, например, минимизировать общее время движения без ограничений на общие выбросы или потребление топлива, при этом такое ослабление ограничений разрешено или требуется для задачи.
В документе предоставлены примерные уравнения и целевые функции для минимизации потребления топлива локомотива. Эти уравнения и функции служат только для иллюстрации, поскольку для того чтобы оптимизировать потребление топлива или оптимизировать другие рабочие параметры локомотива/железнодорожного состава, могут быть использованы другие уравнения и целевые функции.
Математически проблема, которая должна быть разрешена, может быть сформулирована более точно. Физические основы выражаются посредством:

где x - это местоположение железнодорожного состава, v - это скорость железнодорожного состава, t - это время (в милях, милях в часах и минутах или в часах, как требуется), а u - это входная команда положения контроллера (управления дросселем). Дополнительно D обозначает расстояние, которое должно быть пройдено, Tf - требуемое время прибытия на расстояние D по железнодорожному пути, Te - это тяговое усилие, формируемое от локомотивного состава, Ga - это гравитационное сопротивление (которое зависит от длины железнодорожного состава, состава железнодорожного состава и территории движения), а R - это зависимое от чистой скорости сопротивление комбинации локомотивного состава и железнодорожного состава. Начальная и конечная скорость также может быть указана, но без потери общности взята здесь равной нулю (железнодорожный состав остановлен в начале и конце рейса).
Модель легко модифицируется так, чтобы включать в себя другие факторы динамики, такие как запаздывание между изменением управления дросселя u и результирующим тяговым или тормозным усилием.
Все эти показатели могут быть выражены как линейная комбинация любого из следующего:
 - минимизация общего расхода топлива;
- минимизация общего расхода топлива;
 - минимизация времени движения;
- минимизация времени движения;
 - минимизация переходов из одного положения контроллера управления в другое (кусочно-линейные постоянные входные данные);
- минимизация переходов из одного положения контроллера управления в другое (кусочно-линейные постоянные входные данные);
 - минимизация переходов из одного положения контроллера управления в другое (постоянные входные данные).
- минимизация переходов из одного положения контроллера управления в другое (постоянные входные данные).
Заменим член топлива F(·) в (1) на член, соответствующий формированию выбросов.
Например, для выбросов  - минимизация общего потребления выбросов.
- минимизация общего потребления выбросов.
В этом уравнении E - это количество выбросов в граммах на лошадиную силу-час (гр/л.с./час) для каждого из положений контроллера управления (или установок мощности). Помимо этого, минимизация может быть выполнена на основе взвешенной суммы топлива и выбросов.
Общераспространенная и репрезентативная целевая функция, таким образом, следующая:
 (OP)
(OP)
Коэффициенты линейной комбинации зависят от важности (весового коэффициента), присвоенной каждому из членов. Отметим, что в уравнении (OP) u(t) - это переменная оптимизации, которая является постоянной позицией положения контроллера управления. Если требуется дискретное положение контроллера управления, к примеру, для старых локомотивов, решение уравнения (OP) дискретизируется, что может приводить к меньшей экономии топлива. Нахождение решения минимального времени (α1 задается равным нулю, и α2 задается равным нулю или относительно небольшому значению) используется для того, чтобы находить нижнюю границу допустимого времени движения (Tf = Tfmin). В этом случае и u(t), и Tf являются переменными оптимизации. Предпочтительный вариант осуществления разрешает уравнение (OP) для различных значений Tf при Tf > Tfmin, при α3, равной нулю. В этом втором случае Tf трактуется как ограничение.
Для тех, кто знаком с решениями этих проблем оптимизации, могут быть необходимы ограничения присоединения, к примеру, пределы скорости в пути:
0 ≤ v ≤ SL(x)
либо при использовании минимального времени в качестве цели ограничение присоединения может заключаться в том, что должно содержаться ограничение конечной точки, к примеру, общее потребленное топливо должно быть меньше того, что находится в баке, к примеру, посредством:

где WF - это топливо, оставшееся в баке в момент Tf.
Специалисты в данной области техники должны легко признавать, что уравнение (OP) может быть представлено в других формах и что вышеуказанная версия является примерным уравнением для использования в примере настоящего изобретения.
Ссылка на выбросы в контексте настоящего изобретения, как правило, относится к накопленным выбросам, формируемым в форме оксидов азота (NOx), оксида углерода (COx), углеводородов (HC) и твердых частиц (PM). Другие выбросы могут включать в себя, но не только, максимальное значение электромагнитных излучений, например, предел радиочастотной (RF) выходной мощности, измеренной в ваттах, для соответствующих частот, излучаемых локомотивом. Еще одна форма выбросов - это шум, создаваемый посредством локомотива, типично измеряемый в децибелах (дБ). Требование к выбросам может варьироваться на основе времени дня, времени года и/или атмосферных условий, таких как погода либо уровень загрязнения атмосферы. Нормы выбросов могут варьироваться географически в железнодорожной системе. Например, рабочая зона, такая как город или государство, может иметь заданные целевые показатели выбросов, а соседняя зона может иметь другие целевые показатели выбросов, например, меньший объем допустимых выбросов или меньшая плата за данный уровень выбросов.
Соответственно, профиль выбросов для данной географической зоны может быть скорректирован так, чтобы включать в себя значения максимальных выбросов для каждого из регулируемых выбросов, включенных в профиль, чтобы удовлетворять предварительно определенным целевым показателям выбросов, требуемых для этой области. Типично, для локомотива эти параметры выбросов определяются посредством, но не только, настройки мощности (положения контроллера управления), условий окружающей среды, способа регулирования двигателя и т.д. По конструкции каждый локомотив должен соответствовать стандартам по выбросам EPA, и таким образом, в варианте осуществления настоящего изобретения, который оптимизирует выбросы, это может относиться к общим для задачи выбросам, для которых нет текущих технических требований EPA. Работа локомотива согласно оптимизированному плану рейса всегда совместима со стандартами выбросов EPA.
Если ключевая цель в ходе заключается в том, чтобы снизить выбросы, оптимальная формула управления, уравнение (OP), корректируется, чтобы учитывать эту цель. Ключевая гибкость в процессе оптимизации заключается в том, что любые или все цели рейса могут варьироваться по географическому региону или задаче. Например, для высокоприоритетного железнодорожного состава минимальное время может быть единственной целью на маршруте вследствие приоритета железнодорожного состава. В другом примере выходные выбросы могут варьироваться от состояния к состоянию в запланированном маршруте железнодорожного состава.
Чтобы разрешить результирующую проблему оптимизации, в примерном варианте осуществления настоящее изобретение преобразует проблему динамического оптимального управления во временной области в эквивалентную проблему статического математического программирования с N переменными решения, где число N зависит от частоты, с которой выполняются корректировки управления дросселем и торможения, и продолжительности рейса. Для типичных проблем это N может измеряться в тысячах. В примерном варианте осуществления железнодорожный состав движется по железнодорожному пути протяженностью 172 мили на юго-востоке США. Используя пример настоящего изобретения, потребление топлива в 7,6% может быть реализовано при сравнении рейса, определенного и следуемого с помощью типичного примера настоящего изобретения, с рейсом, где управление дросселем/скорость определяется оператором согласно стандартной практике. Повышенная экономия реализуется, поскольку оптимизация, предоставляемая посредством примера настоящего изобретения, формирует стратегию движения с меньшей потерей на сопротивление движению и с небольшой или без потери торможения в сравнении с управляемым оператором рейсом.
Чтобы сделать оптимизацию, описанную выше, компьютерно легко обрабатываемой, может быть использована упрощенная модель железнодорожного состава, как, например, проиллюстрированная на фиг.2 и изложенная в уравнениях, описанных выше. Ключевое усовершенствование в оптимальном профиле создается посредством извлечения более подробной модели со сформированной оптимальной последовательностью мощности, чтобы проверить то, нарушаются ли какие-либо тепловые, электрические и механические ограничения, приводя к модифицированному профилю со скоростью в сравнении с расстоянием, который наиболее близок к ходу, который может быть достигнут без повреждения оборудования локомотива или железнодорожного состава, т.е. с удовлетворением дополнительных наложенных ограничений, таких как тепловые и электрические пределы, на усилия в локомотиве и железнодорожном составе.
Ссылаясь снова на фиг.1, после того как рейс начат 12, формируются 14 команды мощности, чтобы задать начало плана. В зависимости от операционной настройки примера настоящего изобретения одна команда инструктирует локомотиву следовать команде 16 оптимизированной мощности с тем, чтобы достичь оптимальной скорости. Пример настоящего изобретения получает информацию фактической скорости и мощности от локомотивного состава железнодорожного состава 18. Вследствие стандартных приближений в моделях, используемых для оптимизации, вычисление с замкнутым контуром корректировок в оптимизированную мощность получается так, чтобы отслеживать требуемую оптимальную скорость. Эти корректировки рабочих пределов железнодорожного состава могут выполняться автоматически или оператором, который всегда имеет окончательное управление железнодорожным составом.
В некоторых случаях модель, используемая в оптимизации, может значительно отличаться от фактического железнодорожного состава. Это может происходить по множеству причин, в том числе, но не только, вследствие дополнительных захватов грузов или отцепок локомотивов, которые ломаются в пути, ошибок в исходной базе 63 данных и ошибок ввода данных оператором. По этим причинам система мониторинга использует данные железнодорожного состава реального времени для того, чтобы оценивать параметры локомотива и/или железнодорожного состава в реальном времени 20. Оцененные параметры затем сравниваются с предполагаемыми параметрами, когда рейс первоначально создавался 22. На основе каких-либо различий в предполагаемых и оцененных значениях рейс может быть перепланирован 24. Типично рейс перепланируется, если из нового плана может быть реализована значительная экономия.
Другие причины, по которым рейс может быть перепланирован, включают в себя директивы из удаленного участка, например, из диспетчерской, и/или запрос оператора на изменения целевых показателей, так чтобы согласовать их с глобальными целевыми показателями планирования движения. Эти глобальные целевые показатели планирования движения могут включать в себя, но не только, расписания других железнодорожных составов, время, требуемое для того, чтобы сбросить выхлоп из туннеля, техническое обслуживание и т.д. Другая причина может быть обусловлена неисправностью компонента на борту. Стратегии перепланирования могут быть сгруппированы на пошаговые и крупные корректировки в зависимости от серьезности повреждения, как подробнее описано ниже. В общем, новый план может быть извлечен из решения уравнения проблемы оптимизации, описанного выше, но зачастую могут быть найдены более быстрые приблизительные решения, как описано в данном документе.
При работе локомотив 42 постоянно отслеживает эффективность работы системы и постоянно обновляет план рейса на основе фактической измеренной эффективности каждый раз, когда это обновление может улучшить эффективность рейса. Вычисления перепланирования могут выполняться полностью в локомотиве(ах) или полностью либо частично выполняться в удаленном участке, таком как диспетчерская, либо придорожные технологические здания, в которых беспроводная технология позволяет передавать новый план в локомотив 42. Пример настоящего изобретения также позволяет формировать тенденции эффективности для разработки данных для парка локомотивов относительно передаточных функций эффективности. Данные парка могут быть использованы при определении начального плана рейса и могут быть использованы для компромисса по сетевой оптимизации при рассмотрении местоположений множества железнодорожных составов. Например, кривая компромисса времени движения и потребления топлива, как проиллюстрировано на фиг.4, отражает характеристики железнодорожного состава на конкретном маршруте в конкретное время, обновляясь от множественных средних, собираемых от многих аналогичных железнодорожных составов на том же маршруте. Таким образом, центральная диспетчерская, собирающая кривые, аналогичные фиг.4, от множества локомотивов, может использовать эту информацию для того, чтобы лучше координировать общее перемещение железнодорожного состава, чтобы добиться преимущества на уровне системы в потреблении топлива или пропускной способности.
Многие события в повседневной работе могут мотивировать формирование нового или модифицированного плана, включая новый или модифицированный план рейса, который удовлетворяет таким же целям рейса, например, когда железнодорожный состав идет не по расписанию для запланированной встречи или прохода с другим железнодорожным составом, и поэтому должен восполнить потерянное время. Используя фактическую скорость, мощность и местоположение железнодорожного состава, запланированное время прибытия сравнивается с текущим оцененным (спрогнозированным) временем 25 прибытия. На основе разности времени, а также разности параметров (обнаруженных или измененных диспетчерской или оператором) корректируется 26 план. Эта корректировка может выполняться автоматически в ответ на политику железнодорожной компании по управлению отклонениями от плана либо вручную, поскольку оператор на борту и диспетчер совместно определяют оптимальный подход возвращения к плану. Каждый раз, когда план обновлен, но исходные цели, такие как, но не только, время прибытия, остаются неизмененными, дополнительные изменения могут быть факторизованы параллельно, к примеру, новые будущие изменения пределов скорости, что может повлиять на осуществимость восстановления исходного плана. В этих случаях, если план рейса не может быть поддержан, или другими словами, железнодорожный состав не может удовлетворить исходные цели плана рейса, как описано в данном документе, оператору, удаленному участку и/или диспетчерской может быть представлен другой план(ы) рейса.
Перепланирование также может быть выполнено тогда, когда требуется изменить исходные цели. Это перепланирование может быть выполнено в фиксированное заранее запланированное время, вручную на усмотрение оператора или диспетчера либо автономно, когда заранее заданные пределы, такие как рабочие пределы железнодорожного состава, превышены. Например, если выполнение текущего плана запущено позднее более чем на указанное пороговое значение, такое как тридцать минут, пример настоящего изобретения может перепланировать рейс так, чтобы вместить задержку, за счет повышенного потребления топлива, как описано выше, или оповестить оператора либо диспетчера о степени, в которой потерянное время может быть восстановлено, если это возможно (т.е. какое минимальное оставшееся время или максимальное топливо, которое может быть сэкономлено в рамках ограничения по времени). Другие триггеры перепланирования также могут быть рассмотрены на основе потребленного топлива или состояния тягового состава, в том числе, но не только, время прибытия, потеря лошадиных сил вследствие неполадок оборудования и/или временной неработоспособности оборудования (например, работа при слишком высокой или слишком низкой температуре) и/или обнаружение грубых ошибок установки, например, при предполагаемой нагрузке железнодорожного состава. Т.е., если изменение отражает ухудшение рабочих характеристик локомотива для текущего рейса, оно может быть факторизовано на модели и/или уравнения, используемые в процессе оптимизации.
Изменение целевых показателей плана также может вытекать из необходимости координировать события, когда план для одного железнодорожного состава нарушает способность другого железнодорожного состава удовлетворить целевые показатели, и требуется разрешение конфликта на другом уровне, к примеру, в офисе диспетчерской. Например, координация встреч и прохождений может быть дополнительно оптимизирована посредством связи между железнодорожными составами. Таким образом, в качестве примера, если оператор знает то, что он отстает от расписания прибытия к месту встречи и/или прохода, связь от другого железнодорожного состава может известить оператора опаздывающего железнодорожного состава (и/или диспетчерскую). Машинист может ввести информацию, касающуюся ожидаемого несвоевременного прибытия, в примере настоящего изобретения для пересчета плана рейса. Пример настоящего изобретения также может быть использован на высоком уровне или сетевом уровне для того, чтобы предоставить диспетчеризацию, чтобы определить то, какой железнодорожный состав должен замедлить или увеличить скорость, если очевидно, что назначенное ограничение по времени встречи и/или прохода не может быть удовлетворено. Как поясняется в данном документе, это может быть осуществлено посредством передачи данных железнодорожными составами для диспетчеризации с расстановкой приоритетов относительно того, как каждый железнодорожный состав должен изменить свои целевые показатели планирования. Выбор может быть сделан либо на основе расписания, либо на основе выгод от экономии топлива, в зависимости от ситуации.
Для любой из вручную или автоматически инициированных перепланировок пример настоящего изобретения может предоставлять несколько планов рейса оператору. В примерном варианте осуществления настоящее изобретение предоставляет различные профили оператору, позволяя оператору выбирать время прибытия, а также понимать соответствующее воздействие топлива и/или выбросов. Эта информация также может быть предоставлена в диспетчерскую по аналогичным соображениям либо в качестве простого списка альтернатив, либо как множество кривых компромиссов, например, как проиллюстрировано на фиг.4.
В одном варианте осуществления настоящее изобретение включает в себя возможность изучать и приспосабливаться к ключевым изменениям в железнодорожном составе и локомотивном составе, которые могут содержаться в текущем плане и/или в будущих планах. Например, один из триггеров, описанных выше - это потеря лошадиных сил. При наращивании лошадиных сил во времени либо после потери лошадиных сил, либо в начале рейса переходная логика используется для того, чтобы определить, когда требуемые лошадиные силы достигнуты. Эта информация может быть сохранена в базе данных локомотивов 61 для использования в оптимизации либо будущих рейсов, либо текущего рейса, если потеря лошадиных сил происходит впоследствии.
Фиг.3 показывает примерный вариант осуществления элементов системы оптимизации рейса. Элемент 30 определения местоположения определяет местоположение железнодорожного состава 31. Элемент 30 определения местоположения содержит GPS-датчик или систему датчиков, которые определяют местоположение железнодорожного состава 31. Примеры этих других систем могут включать в себя, но не только, придорожные устройства, такие как радиочастотные теги автоматической идентификации оборудования (RF AEI), диспетчерскую и/или определение на основе видео. Другая система может использовать тахометр(ы) на борту локомотива и вычисления расстояния от опорной точки. Как описано выше, система 47 беспроводной связи также может быть предусмотрена для того, чтобы обеспечить связь между железнодорожными составами и/или с удаленным участком, таким как диспетчерская. Информация о местах передвижения также может передаваться от других железнодорожных составов по системе связи.
Элемент 33 характеризации железнодорожного пути предоставляет информацию о железнодорожном пути, в частности, информацию уклона, подъема и кривизны. Элемент 33 характеризации железнодорожного пути может включать в себя бортовую базу 36 данных целостности железнодорожных путей. Датчики 38 измеряют тяговое усилие 40, применяемое локомотивным составом 42, настройку управления дросселем локомотивного состава 42, конфигурационную информацию локомотивного состава 42, скорость локомотивного состава 42, конфигурационную информацию отдельных локомотивов, характеристики отдельных локомотивов и т.д. В примерном варианте осуществления конфигурационная информация локомотивного состава 42 может быть загружена без использования датчика 38, а введена посредством других подходов, как описано выше. Более того, также может быть рассмотрено состояние локомотивов в составе. Например, если один локомотив в составе не может работать выше уровня 5 положения контроллера управления мощностью, эта информация используется при оптимизации плана рейса.
Информация от элемента определения местоположения также может быть использована для того, чтобы определять соответствующее время прибытия железнодорожного состава 31. Например, если железнодорожный состав 31 перемещается по железнодорожному пути 34 в направлении пункта назначения, нет железнодорожного состава, едущего за ним, и железнодорожный состав не имеет фиксированного крайнего срока прибытия, чтобы удовлетворять ему, элемент определения местоположения, включающий в себя, но не только, радиочастотные теги автоматической идентификации оборудования (RF AEI), диспетчерскую и/или определения на основе видео, может быть использован для того, чтобы определять точное местоположение железнодорожного состава 31. Более того, входные данные от этих систем передачи сигналов могут быть использованы для того, чтобы регулировать скорость железнодорожного состава. Используя бортовую базу данных железнодорожных путей, описанную ниже, и элемент определения местоположения, такой как GPS, пример настоящего изобретения может регулировать интерфейс оператора, чтобы отражать состояние системы передачи сигналов в данном местоположении локомотива. В ситуации, когда состояния сигнала указывают ограничительные скорости, планировщик может выбрать замедление железнодорожного состава, чтобы сэкономить потребление топлива.
Информация от элемента 30 определения местоположения также может быть использована для того, чтобы изменять целевые показатели планирования как функцию от расстояния до пункта назначения. Например, вследствие неизбежных неопределенностей о перегруженности вдоль маршрута более быстрые целевые показатели времени на ранней стадии маршрута могут быть использованы в качестве защиты от задержек, которые по статистике возникают позднее. Если в конкретном рейсе эти задержки не возникают, целевые показатели в дальнейшей части передвижения могут быть модифицированы так, чтобы использовать встроенное время простоя, которое накоплено ранее и тем самым восстанавливать определенную эффективность использования топлива. Аналогичная стратегии может быть активирована в отношении целевых показателей с ограничениями выбросов, к примеру, ограничениями выбросов, которые применяются при достижении городской зоны.
В качестве примера стратегии защиты, если рейс запланирован из Нью-Йорка в Чикаго, система может предоставить вариант управлять железнодорожным составом медленнее в начале рейса, в середине рейса или в конце рейса. Пример настоящего изобретения оптимизирует план рейса, чтобы предоставить возможность более медленной работы в конце рейса, поскольку неизвестные ограничения, такие как, но не только, погодные условия, техническое обслуживание железнодорожного пути и т.д., могут возникать и стать известными по ходу рейса. В качестве еще одного соображения, если традиционно перегруженные зоны известны, план разрабатывается с вариантом повысить гибкость движения в этих регионах. Следовательно, пример настоящего изобретения также может учитывать взвешивание/штрафование как функцию от времени/расстояния в будущем и/или на основе известного/предыдущего опыта. Специалисты в данной области техники должны легко признавать, что такое планирование и перепланирование для учета погодных условий, состояний железнодорожного пути, других железнодорожных составов на железнодорожном пути и т.д., может рассматриваться в любое время в ходе рейса, когда план рейса скорректирован соответствующим образом.
Фиг.3 дополнительно раскрывает другие элементы, которые могут быть частью примера настоящего изобретения. Процессор 44 имеет такую функциональность, чтобы принимать информацию от элемента 30 определения местоположения, элемента 33 характеризации железнодорожного пути и датчиков 38. Алгоритм 46 работает в рамках процессора 44. Алгоритм 46 вычисляет оптимизированный план рейса на основе параметров, включающих в себя локомотив 42, железнодорожный состав 31, железнодорожный путь 34 и целевые показатели задачи, как описано в данном документе. В примерном варианте осуществления план рейса устанавливается на основе моделей поведения железнодорожного состава, по мере того как железнодорожный состав 31 перемещается по железнодорожному пути 34, в качестве решения нелинейных уравнений, извлеченных из применимой физики с упрощающими допущениями, которые предусмотрены в алгоритме. Алгоритм 46 имеет доступ к информации от элемента 30 определения местоположения, элемента 33 характеризации железнодорожного пути и/или датчиков 38, чтобы создать план рейса, минимизирующий потребление топлива локомотивного состава 42, минимизирующий выбросы локомотивного состава 42, устанавливающий требуемое время рейса и/или предоставляющий соответствующее время работы экипажа на борту локомотивного состава 42. В примерном варианте осуществления также предусмотрен приводной механизм или элемент 51 контроллера. Как поясняется в данном документе, элемент 51 контроллера может управлять железнодорожным составом, по мере того как он следует плану рейса. В примерном варианте осуществления, описанном дополнительно в данном документе, элемент 51 контроллера принимает решения по управлению железнодорожным составом автономно. В другом примерном варианте осуществления оператор может участвовать в направлении железнодорожного состава, чтобы следовать или отклоняться от плана рейса по собственному усмотрению.
В одном варианте осуществления настоящего изобретения план рейса является модифицируемым в реальном времени, по мере того как план выполняется. Это включает в себя создание первоначального плана для рейса на большое расстояние по причине сложности алгоритма оптимизации плана. Когда общая протяженность профиля рейса превышает данное расстояние, алгоритм 46 может быть использован для того, чтобы сегментировать задачу посредством разделения задачи на путевые точки. Хотя поясняется только один алгоритм 46, специалисты в данной области техники должны принимать во внимание, что может быть использовано несколько алгоритмов и что эти несколько алгоритмов связываются так, чтобы создать план рейса.
Путевые точки рейса могут включать в себя естественные местоположения, где железнодорожный состав 31 останавливается, такие как, но не только, один магистральный разъезд для встречи с противоположным движением или для прохода железнодорожного состава позади текущего железнодорожного состава, сортировочная станция, промышленная ветка, на которой вагоны собираются и выезжают, и места запланированного технического обслуживания. В этих путевых точках железнодорожному составу 31 может потребоваться быть в нужном месте в запланированное время, остановиться или перемещаться со скоростью в указанном диапазоне. Продолжительность от прибытия до убытия в путевых точках называется временем выстоя.
В примерном варианте осуществления настоящее изобретение может разбивать более длительный рейс на меньшие сегменты согласно систематическому процессу. Каждый сегмент может быть в некоторой степени произвольным по длине, но типично выбирается в естественном месте, таком как остановка или значительное ограничение скорости, либо в ключевых путевых точках или столбах с указанием числа миль, которые задают пересечения с другими маршрутами. С учетом секции или сегмента, выбранного таким образом, профиль движения создается для каждого сегмента железнодорожного пути как функция от времени движения, взятая как независимая переменная, например, как показано на фиг.4, подробнее описанная ниже. Компромиссное отношение потребленное топливо/время движения, ассоциативно связанное с каждым сегментом, может быть вычислено до достижения железнодорожным составом 31 этого сегмента железнодорожного пути. Общий план рейса, следовательно, может быть создан из профилей движения, созданных для каждого сегмента. Пример изобретения оптимально распределяет время движения по всем сегментам рейса так, чтобы удовлетворялось общее требуемое время рейса, и минимизировался общий расход топлива по всем сегментам. Примерный трехсегментный рейс раскрыт на фиг.6 и пояснен ниже. Тем не менее, специалисты в данной области техники должны принимать во внимание, что хотя описываются сегменты, план рейса может содержать один сегмент, представляющий полный рейс.
Фиг.4 показывает примерный вариант осуществления кривой "расход топлива/время движения". Как упоминалось выше, эта кривая 50 создается при вычислении оптимального профиля рейса для различного времени движения для каждого сегмента. Т.е. для данного времени 51 движения потребленное топливо 52 - это результат детального профиля движения, вычисленного так, как описано выше. После того как время движения для каждого сегмента назначено, определяется план мощности/скорости для каждого сегмента из ранее вычисленных решений. Если имеются какие-либо ограничения скорости в путевых точках между сегментами, такие как, но не только, изменение предела скорости, они согласуются в ходе создания оптимального профиля рейса. Если ограничения скорости изменяются только в рамках одного сегмента, кривая 50 "расход топлива/время движения" должна быть повторно вычислена только для измененного сегмента. Этот процесс уменьшает время, требуемое для повторного вычисления дополнительных частей или сегментов рейса. Если локомотивный состав или железнодорожный состав существенно изменяется вдоль маршрута, к примеру, из-за отцепки локомотива или захвата или отцепки вагонов, профили движения для всех последующих сегментов должны быть пересчитаны, создавая новые экземпляры кривой 50. Эти новые кривые 50 затем используются наряду с новыми целевыми показателями расписания, чтобы распланировать оставшийся рейс.
После того как план рейса создан так, как пояснено выше, траектория скорости и мощности в сравнении с расстоянием позволяет железнодорожному составу достигать пункта назначения с минимальным расходом топлива и/или выбросами за требуемое время рейса. Предусмотрено несколько методик выполнения плана рейса. Как подробнее пояснено ниже, в одном примерном варианте осуществления в обучающем режиме пример настоящего изобретения отображает управляющую информацию оператору. Машинист следует информации, чтобы достичь требуемой мощности и скорости, как определено согласно оптимальному плану рейса. Таким образом, в этом варианте осуществления оператору предоставляются рабочие предложения для использования в управлении железнодорожным составом. В другом примерном варианте осуществления управляющие действия для того, чтобы ускорять железнодорожный состав или сохранять постоянную скорость, выполняются посредством примеров настоящего изобретения. Тем не менее, когда железнодорожный состав 31 должен быть замедлен, оператор отвечает за применение тормозов через управление тормозной системой 52. В другом примерном варианте осуществления настоящее изобретение командует действиями мощности и торможения, как требуется для того, чтобы следовать желательному пути скорость-расстояние.
Стратегии управления с обратной связью используются для того, чтобы корректировать последовательность управления мощностью в профиле, чтобы учитывать такие события, как, но не только, изменения нагрузки железнодорожного состава, вызываемые неустойчивым встречным ветром и/или попутным ветром. Другая такая ошибка может быть вызвана ошибкой в параметрах железнодорожного состава, такой как, но не только, масса и/или сопротивление железнодорожного состава, в сравнении с допущениями в оптимизированном плане рейса. Третий тип ошибки может возникать вследствие некорректной информации в базе 36 данных железнодорожных путей. Другая возможная ошибка может влечь за собой несмоделированные отличия в рабочих характеристиках, обусловленные двигателем локомотива, температурным снижением характеристик тягового электродвигателя и/или другими факторами. Стратегии управления с обратной связью сравнивают фактическую скорость как функцию от местоположения со скоростью в требуемом оптимальном профиле. На основе этой разности в оптимальный профиль мощности добавляется корректировка, чтобы привести фактическую скорость движения в соответствие с оптимальным профилем. Чтобы обеспечить стабильное регулирование, может быть предусмотрен компенсационный алгоритм, который фильтрует скорости обратной связи в корректировке мощности, чтобы обеспечить стабильность рабочих характеристик в замкнутом контуре. Компенсация может включать в себя стандартную динамическую компенсацию, используемую специалистами в области техники системного проектирования, чтобы удовлетворять целевым показателям производительности.
Примеры настоящего изобретения предоставляют наиболее простое, а следовательно, наиболее быстрое средство для того, чтобы приспосабливать изменения в целевых показателях рейса, которые являются правилом, а не исключением в железнодорожных операциях. В примерном варианте осуществления для того чтобы определять оптимальный по топливу рейс из точки A в точку B, где имеются остановки по пути, а также для обновления рейса по оставшейся части рейса после того как рейс начат, для нахождения оптимального профиля рейса может быть использован способ субоптимального разложения. Используя способы моделирования, способ вычисления позволяет находить план рейса с указанным временем движения и начальной и конечной скоростью, так чтобы удовлетворять всем пределам скоростей и ограничениям характеристик локомотива, когда предусмотрены остановки. Хотя нижеследующее описание направлено на оптимизацию потребления топлива, оно также может быть применено для того, чтобы оптимизировать другие факторы, такие как, но не только, выбросы, расписание, удобство экипажа и резкие изменения нагрузки. Способ может быть использован сначала при разработке плана рейса и, более важно, для адаптации к изменениям целевых показателей после инициирования рейса.
Как поясняется в данном документе, примеры настоящего изобретения могут использовать настройку, проиллюстрированную в примерной блок-схеме последовательности операций способа, проиллюстрированной на фиг.5, и в качестве типичного трехсегментного примера, подробно показанного на фиг.6. Как проиллюстрировано, рейс может быть разбит на два или более сегментов, T1, T2 и T3, хотя, как описано в данном документе, можно рассматривать рейс как один сегмент. Как поясняется в данном документе, границы сегмента могут не приводить к сегментам равной длины. Вместо этого сегменты используют естественные или конкретные для задачи границы. Оптимальные планы рейсов заранее вычисляются для каждого сегмента. Если потребление топлива в сравнении со временем движения является целью рейса, которая должна быть удовлетворена, кривые топлива в сравнении со времени движения формируются для каждого сегмента. Как описано в данном документе, кривые могут быть основаны на других факторах, при этом факторы являются целевыми показателями, которые должны быть удовлетворены согласно плану рейса. Когда время рейса является определяемым параметром, время рейса для каждого сегмента вычисляется при удовлетворении общих ограничений по времени движения.
Фиг.6 иллюстрирует пределы скорости для примерного трехсегментного 200-мильного рейса 97. Дополнительно проиллюстрированы изменения уклона в ходе 200-мильного рейса 98. Также показана комбинированная схема 99, иллюстрирующая кривые потребляемого топлива для каждого сегмента рейса согласно времени движения.
Используя оптимальную установку управления, описанную ранее, настоящий способ вычисления позволяет находить план рейса с указанным временем движения и начальной и конечной скоростью, так чтобы удовлетворять всем пределам скоростей и ограничениям характеристик локомотива, когда предусмотрены остановки. Хотя нижеследующее описание направлено на оптимизацию потребления топлива, оно также может быть применено для того, чтобы оптимизировать другие факторы, описанные в данном документе, такие как, но не только, выбросы. Способ может содержать требуемое время выстоя на остановках и учитывает ограничения на самое раннее прибытие и убытие в данном месте, что может требоваться, например, при движении с одной колеей, где время для того чтобы войти или пройти подъездной путь, является критичным.
Примеры настоящего изобретения находят оптимальный по топливу рейс с расстояния D 0 до D M , пройденный за время T, где M-1 промежуточных остановок в D 1 ,...,D M-1 , и при этом время прибытия и убытия на этих остановках ограничено посредством следующего:
t min (i) ≤ t arr (D i ) ≤ t max (i)-Δt i,
t arr (D i ) + Δt i ≤ t dep(D i) ≤ t max (i) i = 1,..., M-1
где t arr (D i ), t dep(D i) и Δt i - это время прибытия, убытия и минимальной стоянки на i-той остановке соответственно. При условии, что оптимальность по топливу подразумевает минимизацию времени остановки, имеем t dep (D i) = t arr (D i) + Δt i, что исключает второе неравенство выше.
Предположим, что для каждого i=1,...,M оптимальный по топливу рейс из D i-1 в D i для времени движения t, T min (i)≤t≤T max (i), неизвестен. Пусть F i (t) будет потреблением топлива, соответствующим этому рейсу. Если время движения из D j-1 в D j обозначено T j, то время прибытия в D i задается посредством следующего:
где Δt 0 задается равным нулю. Оптимальный по топливу рейс из D 0 в D M для времени движения T затем получается посредством нахождения T i , i=1,...,M, что минимизирует:


при условии:


Когда рейс в процессе прохождения, проблемой является повторное определение оптимального по топливу решения для оставшейся части рейса (первоначально из D
0 в D
M за время T), по мере того как рейс проходится, но где повреждения препятствуют следованию оптимальному по топливу решению. Пусть текущее расстояние и скорость будет x и v соответственно, где D
i-1<x≤D
i. Кроме того, пусть текущее время с начала рейса будет t
act
. В таком случае оптимальное по топливу решение для оставшейся части рейса от x до D
M, которое сохраняет исходное время прибытия в D
M, получается посредством нахождения  , который минимизирует:
, который минимизирует:

при условии:



Здесь  (t, x, v) - это потребление топлива в оптимальном рейсе от x до D
i
, пройденном за время t, при начальной скорости в x, равной v.
(t, x, v) - это потребление топлива в оптимальном рейсе от x до D
i
, пройденном за время t, при начальной скорости в x, равной v.
Как описано выше, примерный процесс для того, чтобы предоставлять более эффективное перепланирование, составляет оптимальное решение для рейса от остановки до остановки из секционированных сегментов. Для рейса из D
i-1 в D
i со временем движения T
i выберем набор промежуточных точек D
ij
, j = 1,...,N
i-1. Пусть D
i0 = D
i-1 и  =D
i. Затем выразим потребление топлива для оптимального рейса из D
i-1 в D
i как:
=D
i. Затем выразим потребление топлива для оптимального рейса из D
i-1 в D
i как:

где f
ij(t, v
i,j-1, v
ij) - это потребление топлива для оптимального рейса из D
j-1 в D
ij, пройденного за время t при начальной и конечной скорости в v
i,j-1 и v
ij. Более того, t
ij - это время в оптимальном рейсе, соответствующее расстоянию D
ij. По определению,  -t
i0=T
i. Поскольку железнодорожный состав останавливается в D
i0 и
-t
i0=T
i. Поскольку железнодорожный состав останавливается в D
i0 и  , v
i0=
, v
i0= =0.
=0.
Вышеприведенное выражение дает возможность альтернативного определения функции F i (t) посредством определения сначала функций f ij (·), 1 ≤ j ≤ N i , затем нахождения τij , 1≤j≤N i и v ij, 1≤j≤N i, которые минимизируют:

при условии:

 j = 1,…,N
i-1
j = 1,…,N
i-1

Посредством выбора D ij (к примеру, при ограничениях скорости или в точках встречи) v max (i,j) - v min (i,j) может быть минимизировано, тем самым минимизируя область, в которой f ij() должно быть известно.
На основе вышеуказанного секционирования более простой подход субоптимального перепланирования, чем описанный выше, заключается в том, чтобы ограничить перепланирование временем, когда железнодорожный состав находится в точках расстояния D ij , 1≤i≤M, 1≤j≤N i . В точке D ij новый оптимальный рейс из D ij в D M может быть определен посредством нахождения τik , j<k≤N i , v ik , j<k<N i и τmn , i<m≤M, 1≤n≤N m , v mn , i<m≤M, 1≤n<N m , которые минимизируют:

при условии:



где:

Дополнительное упрощение получается посредством результата повторного вычисления T m , i <m ≤ M, до тех пор, пока точка расстояния D i не достигнута. Таким образом, в точках D ij между D i-1 и D i вышеуказанная минимизация должна быть выполнена только для τik , j<k≤ N i , v ik , j<k<N i. T i возрастает так, как требуется для того, чтобы включить любое более длительное время движения из D i-1 в D ij, чем запланировано. Это увеличение затем компенсируется, если возможно, посредством повторного вычисления T m, 1<m≤M, в точке D i расстояния.
В отношении раскрытой выше конфигурации с замкнутым контуром общая входная энергия, требуемая для того чтобы переместить железнодорожный состав 31 из точки A в точку B, состоит из суммы четырех компонентов, в частности, разности кинетической энергии между точками A и B; разности потенциальной энергии между точками A и B; потери энергии вследствие трения и других потерь на сопротивление движению; и энергии, рассеиваемой за счет применения тормозов. При условии, что начальная и конечная скорости равны (к примеру, стационарны), первый компонент равен нулю. Кроме того, второй компонент не зависит от стратегии движения. Таким образом, достаточно минимизировать сумму последних двух компонентов.
Следование профилю постоянной скорости минимизирует потери на сопротивление движению. Следование профилю постоянной скорости также минимизирует общую входную энергию, когда торможение не требуется для того, чтобы поддерживать постоянную скорость. Тем не менее, если торможение требуется для того, чтобы поддерживать постоянную скорость, применение торможения только для того, чтобы поддерживать постоянную скорость, с большой вероятностью увеличит общую требуемую энергию вследствие необходимости пополнять энергию, рассеиваемую тормозами. Существует возможность того, что некоторое торможение может фактически снизить общее потребление энергии, если дополнительные потери на торможение превышают смещение от результирующего снижения потерь на сопротивление движению, вызываемого торможением, посредством уменьшения варьирования скорости.
После завершения перепланирования из набора событий, описанных выше, новому оптимальному плану положение контроллера/скорости можно следовать с помощью управления с замкнутым контуром, описанного в данном документе. Тем не менее, в некоторых ситуациях может быть недостаточно времени для того, чтобы осуществлять планирование с разложением по сегментам, описанное выше, и в частности, когда есть критичные ограничения по скорости, которые должны соблюдаться, альтернатива может быть предпочтительной. Примеры настоящего изобретения достигают этого с помощью алгоритма, упоминаемого как "интеллектуальное автоматическое поддержание скорости движения". Алгоритм интеллектуального автоматического поддержания скорости движения является эффективным процессом для формирования на лету эффективного по энергии (следовательно, эффективного по топливу) субоптимального предписания для управления железнодорожным составом 31 на известной территории. Этот алгоритм предполагает знание местоположения железнодорожного состава 31 на железнодорожном пути 34 в любой момент времени, а также знание уклона и кривизны железнодорожного пути в зависимости от местоположения. Способ базируется на модели точка-масса для движения железнодорожного состава 31, параметры которого могут быть адаптивно оценены из оперативных измерений движений железнодорожного состава, как описано выше.
Алгоритм интеллектуального автоматического поддержания скорости движения имеет три главных компонента, а именно модифицированный профиль предела скорости, который выступает в качестве эффективного по энергии руководства по снижению пределов скорости; профиль настройки идеального управления дросселем или динамического тормоза, который пытается сбалансировать минимизацию изменений скорости и торможения; и механизм комбинирования двух вышеуказанных компонентов, чтобы сформировать команды положений контроллера, используя контур обратной связи скорости, чтобы скорректировать несовпадения смоделированных параметров в сравнении с реальными параметрами. Интеллектуальное автоматическое поддержание скорости движения может включать в себя стратегии примеров настоящего изобретения без активного торможения (т.е. оператору передается, и, как предполагается, он обеспечивает нужное замедление) либо вариант, который предоставляет активное торможение.
В отношении алгоритма автоматического поддержания скорости движения, который не управляет динамическим торможением, три примерных компонента - это модифицированный профиль ограничения скорости, который выступает в качестве эффективного с точки зрения энергобаланса руководства по снижению скоростных ограничений, сигнал оповещения, чтобы оповещать оператора, когда торможение должно быть активировано, идеальный профиль управления дросселем, который пытается сбалансировать минимизацию изменений скорости и оповещение оператору о применении тормозов, и механизм, использующий контур обратной связи для того, чтобы скорректировать несовпадения параметров модели с реальными параметрами.
Также в примеры настоящего изобретения включен подход для того, чтобы идентифицировать значения ключевых параметров железнодорожного состава 31. Например, в отношении оценки массы железнодорожного состава фильтр Калмана и рекурсивный подход метода наименьших квадратов могут быть использованы для того, чтобы обнаруживать ошибки, которые могут развиться со временем.
Фиг.7 показывает примерную блок-схему последовательности операций способа оптимизации рейса. Как описано ранее, удаленное оборудование, такое как диспетчерский центр 60, может предоставлять информацию для использования посредством примеров настоящего изобретения. Как проиллюстрировано, эта информация предоставляется в исполнительный элемент 62 управления. Также в исполнительный элемент 62 управления предоставляется база 63 данных информации моделирования локомотивов, база 36 данных информации по железнодорожным путям, такой как, но не только, информации по уклонам железнодорожного пути и информации по пределам скорости, оцененные параметры железнодорожного состава, такие как, но не только, коэффициенты веса и сопротивления железнодорожного состава и таблицы расхода топлива из блока 64 оценки расхода топлива. Исполнительный элемент 62 управления предоставляет информацию в планировщик 12, который подробнее раскрыт на фиг.1. После того как план рейса вычислен, план предоставляется в блок выдачи рекомендаций по управлению, оператору или в элемент 51 контроллера. План рейса также предоставляется в исполнительный элемент 62 управления с тем, чтобы он мог сравнить рейс, когда предоставлены другие новые данные.
Как описано выше, блок 51 выдачи рекомендаций по управлению может автоматически задавать мощность, задаваемую положением контроллера, либо значение мощности, задаваемой положением контроллера, при заранее установленной настройке положения контроллера или оптимальное непрерывное значение мощности. Помимо предоставления команды скорости в локомотив 31 предоставляется дисплей 68 с тем, чтобы оператор мог видеть то, что рекомендовал планировщик. Машинист также имеет доступ к пульту 69 управления. Посредством пульта 69 управления оператор может принять решение о том, следует ли применять рекомендованную мощность, задаваемую положением контроллера. С этой целью оператор может ограничить целевую или рекомендованную мощность. Т.е. в любое время оператор всегда имеет окончательные полномочия над регулировкой мощности для работы локомотивного состава, включая то, следует ли применять тормоза, если план рейса рекомендует замедление железнодорожного состава 31. Например, при управлении на затемненной территории или когда информация от придорожного оборудования не может электронно передавать информацию в железнодорожный состав, и вместо этого оператор видит визуальные сигналы от придорожного оборудования, оператор вводит команды на основе информации, содержащейся в базе данных железнодорожных путей, и визуальных сигналов от придорожного оборудования. На основе того, как функционирует железнодорожный состав 31, информация, касающаяся измерений топлива, предоставляется в блок 64 оценки расхода топлива. Поскольку прямое измерение расхода топлива типично недоступно в локомотивном составе, вся информация о топливе, потребленном к данной точке рейса, и перспективная оценка на будущее, если оптимальные планы выполняются, использует калиброванные физические модели, применяемые при разработке оптимальных планов. Например, эти прогнозы могут включать в себя, но не только, использование измеренной полной мощности в л.с. и известные характеристики топлива, чтобы извлечь значение по всему потребленному топливу.
Железнодорожный состав 31 также имеет устройство 30 определения местоположения, такое как GPS-датчик, как описано выше. Информация предоставляется в блок 65 оценки параметров железнодорожного состава. Этот блок может включать в себя, но не только, данные GPS-датчиков, данные тягового/тормозного усилия, данные состояния торможения, скорость и все изменения данных скорости. С помощью информации, касающейся информации по уклонам и пределам скорости, коэффициенты веса и сопротивления предоставляются в исполнительный элемент 62 управления.
Примеры настоящего изобретения также могут предоставлять возможность использования непрерывно изменяемой мощности в ходе планирования реализации и реализации управления с замкнутым контуром. В традиционном локомотиве мощность типично квантуется до восьми дискретных уровней. Современные локомотивы могут использовать непрерывное изменение лошадиных сил, которое может быть включено в ранее описанные способы оптимизации. При непрерывной мощности локомотив 42 может дополнительно оптимизировать рабочие условия, к примеру, посредством минимизации дополнительной нагрузки и потерь при передаче мощности и точно отрегулировать области лошадиных сил двигателя с оптимальной эффективностью или до точек меньших пределов выбросов. Примеры включают в себя, но не только, минимизацию потерь системы охлаждения, регулировку напряжений генератора переменного тока, регулировку скоростей двигателя и снижение числа приводимых осей. Дополнительно локомотив 42 может использовать бортовую базу 36 данных железнодорожных путей и спрогнозированные требования к рабочим характеристикам, чтобы минимизировать дополнительную нагрузку и потери при передаче мощности, чтобы предоставить оптимальную эффективность для целевого потребления топлива/выбросов. Примеры включают в себя, но не только, снижение числа приводимых осей на равнинной территории и предварительное охлаждение двигателя локомотива перед въездом в туннель.
Примеры настоящего изобретения также могут использовать бортовую базу 36 данных железнодорожных путей и спрогнозированные рабочие характеристики для того, чтобы корректировать рабочие характеристики локомотива, например, обеспечить то, что железнодорожный состав имеет достаточную скорость, по мере того как он достигает холма и/или туннеля. Например, это может быть выражено как ограничение скорости в конкретном месте, которое становится частью формирования оптимального плана, созданного решением уравнения (OP). Дополнительно примеры настоящего изобретения могут включать в себя правила управления железнодорожным составом, такие как, но не только, частоты отслеживания тягового усилия и частоты отслеживания максимального тормозного усилия. Они могут быть вставлены непосредственно в формулу оптимального профиля рейса либо альтернативно вставлены в регулятор с замкнутым контуром, используемый для того, чтобы управлять применением мощности, чтобы достигать целевой скорости.
В предпочтительном варианте осуществления настоящее изобретение устанавливается только на ведущем локомотиве железнодорожного состава. Хотя примеры настоящего изобретения не зависят от данных и взаимодействий с другими локомотивами, они могут быть интегрированы с функциональностью диспетчера состава, как раскрыто в Патенте (США) номер 6691957 и Патентной заявке номер 10/429596 (обе принадлежат правопреемнику и включены по ссылке), и/или функциональностью блока оптимизации состава, чтобы повысить эффективность. Взаимодействие с несколькими железнодорожными составами не исключается, как проиллюстрировано посредством примера диспетчерской, разрешающей два "независимо оптимизированных" железнодорожного состава, описанных в данном документе.
Примеры настоящего изобретения могут быть использованы с составами, в которых локомотивы не являются смежными, к примеру, с одним или более локомотивами впереди, другими в середине и хвосте железнодорожного состава. Такие конфигурации называются конфигурациями с распределенной мощностью, когда стандартное сцепление между локомотивами заменяется линией радиосвязи или дополнительным кабелем, чтобы связать локомотивы между собой. При работе с распределенной мощностью оператор в ведущем локомотиве может управлять рабочими функциями удаленных локомотивов в составе посредством системы управления, такой как элемент управления распределенной мощностью. В частности, при работе с распределенной мощностью оператор может командовать каждому локомотивному составу работать на различных уровнях мощности, задаваемой положением контроллера (или один состав может быть в движении, а другой - в торможении), при этом каждый отдельный элемент в составе локомотива работает на одинаковой мощности, задаваемой положением контроллера.
Железнодорожные составы с системами распределенной мощности могут управляться в различных режимах. В одном режиме все локомотивы в железнодорожном составе управляются одной командой положения контроллера управления. Если ведущий локомотив командует движение с положением N8 контроллера управления, всем модулям в железнодорожном составе выдается команда сгенерировать движение с положением N8 контроллера управления. В режиме "независимого" управления локомотивы или наборы локомотивов, распределенные по железнодорожному составу, могут управляться с различной мощностью движения или торможения. Например, когда железнодорожный состав достигает вершины горы, ведущий локомотив (на спуске с горы) может быть переведен в режим торможения, тогда как локомотивы в середине или в конце железнодорожного состава (на подъеме в гору) могут приводиться в движение. Это делается для того, чтобы минимизировать растягивающие усилия на механические сцепки, которые соединяют вагоны и локомотивы. Традиционно управление системой с распределенной мощностью в "независимом" режиме требовало от оператора вручную командовать каждым удаленным локомотивом или набором локомотивов посредством дисплея в ведущем локомотиве. Используя основанную на физике модель планирования, информацию конфигурации железнодорожного состава, бортовую базу данных железнодорожных путей, бортовые правила управления, систему определения местоположения, управление мощностью/тормозами с замкнутым контуром в реальном времени и обратную связь от датчиков, система может автоматически управлять железнодорожным составом с распределенной мощностью в "независимом" режиме.
При работе с распределенной мощностью оператор в ведущем локомотиве может управлять рабочими функциями удаленных локомотивов в удаленных составах посредством системы управления, такой как элемент управления распределенной мощностью. Таким образом, при работе с распределенной мощностью оператор может командовать каждому составу локомотивов работать на различном уровне мощности, задаваемой положением контроллера (или один состав может приводиться в движение, а другой - в торможении), при этом каждый отдельный локомотив в локомотивном составе работает на одинаковой мощности, задаваемой положением контроллера. В примерном варианте осуществления, когда настоящее изобретение установлено в железнодорожном составе, предпочтительно поддерживая связь с элементом управления распределенной мощностью, когда уровень мощности, задаваемой положением контроллера, удаленного локомотивного состава требуется поддерживать, как рекомендовано посредством оптимизированного плана рейса, пример настоящего изобретения передает эту настройку мощности в удаленные составы локомотивов для реализации. Как поясняется ниже, варианты применения тормозов реализованы аналогично.
При работе с распределенной мощностью ранее описанная проблема оптимизации может быть улучшена, чтобы разрешать дополнительные степени свободы в том, что каждый из удаленных модулей может независимо управляться с ведущего модуля. Ценность этого заключается в том, что дополнительные целевые показатели или ограничения, связанные с усилиями в железнодорожном составе, могут быть включены в функцию рабочих характеристик, при условии, что модель, для того чтобы отражать усилия в железнодорожном составе, также включена. Таким образом, примеры настоящего изобретения могут включать в себя использование нескольких средств управления дросселем, чтобы более оптимально регулировать усилия в железнодорожном составе, а также потребление топлива и выбросы.
В железнодорожном составе, использующем диспетчер составов, ведущий локомотив в локомотивном составе может работать с отличной от других локомотивов в этом составе настройкой мощности, задаваемой положением контроллера. Другие локомотивы в составе работают с такой же настройкой мощности, задаваемой положением контроллера. Примеры настоящего изобретения могут быть использованы в связи с диспетчером составов, чтобы управлять настройками мощности, задаваемой положением контроллера, для локомотивов в составе. Таким образом, на основе примеров настоящего изобретения, поскольку диспетчер составов разделяет локомотивный состав на две группы, ведущий локомотив и ведомые модули, ведущий локомотив управляется так, чтобы работать при определенной мощности, задаваемой положением контроллера, а хвостовые локомотивы могут управляться так, чтобы работать при другой мощности, задаваемой положением контроллера. В примерном варианте осуществления элементом управления с распределенной мощностью может быть система и/или устройство, где выполняется эта операция.
Аналогично, когда блок оптимизации состава используется с локомотивным составом, примеры настоящего изобретения могут быть использованы вместе с блоком оптимизации состава, чтобы определять мощность, задаваемую положением контроллера, для каждого локомотива в локомотивном составе. Например, предположим, что план рейса рекомендует равную четырем настройку мощности, задаваемой положением контроллера, для локомотивного состава. На основе местоположения железнодорожного состава блок оптимизации состава принимает эту информацию и затем определяет настройку мощности, задаваемой положением контроллера, для каждого локомотива в составе. В этой реализации эффективность регулировок настроек мощности, задаваемой положением контроллера, для каналов связи внутри железнодорожного состава повышается. Более того, как описано выше, реализация этой конфигурации может быть осуществлена с помощью системы распределенного управления.
Помимо этого, как пояснялось выше, примеры настоящего изобретения могут быть использованы для непрерывных корректировок и перепланирования в отношении того, когда состав железнодорожного состава использует торможение, на основе предстоящих интересующих элементов, таких как, но не только, железнодорожные переезды, изменения уклона, приближающиеся запасные пути, приближающиеся сортировочные станции и приближающиеся заправочные станции, при этом каждый локомотив в составе может потребовать собственного варианта торможения. Например, если железнодорожный состав передвигается по холму, ведущему локомотиву может потребоваться перейти в режим торможения, тогда как удаленным локомотивам - не переходить.
Фиг.8, 9 и 10 показывают примерные дисплеи для использования оператором. Фиг.8 иллюстрирует предоставленный профиль 72 рейса. В профиле указано размещение 73 локомотива. Предоставляется такая информация, как длина 105 железнодорожного состава и число вагонов 106 в железнодорожном составе. Также предоставлены элементы, касающиеся уклона 107 железнодорожного пути, кривизны и придорожных элементов 108, включая местоположение 109 мостов и скорость 110 железнодорожного состава. Дисплей 68 дает возможность оператору видеть эту информацию, а также видеть то, где на маршруте находится железнодорожный состав. Предоставляется информация, касающаяся расстояния и/или оцененного времени прибытия в такие места, как переезды 112, сигналы 114, изменения 116 скорости, межевые ориентиры 118 и пункты 120 назначения. Средство 125 управления временем прибытия также предусмотрено для того, чтобы давать возможность пользователю определять экономию топлива, реализованную в ходе рейса. Машинист имеет возможность варьировать время 127 прибытия и видеть, как это влияет на экономию топлива. Как поясняется в данном документе, специалисты в данной области техники должны признавать то, что экономия топлива является типичным примером только одного целевого показателя, который может быть проанализирован с помощью средства управления. Таким образом, в зависимости от рассматриваемого параметра другие параметры, описанные в данном документе, могут рассматриваться и оцениваться с помощью средства управления, видимого оператору. Машинисту также предоставляется информация, касающаяся продолжительности того, как долго экипажей управляет железнодорожным составом. В примерных вариантах осуществления информация времени и расстояния может быть проиллюстрирована как время и/или расстояние до конкретного события и/или местоположения, либо она может предоставлять общее истекшее время.
Как проиллюстрировано на фиг.9, примерный дисплей предоставляет информацию о данных 130 состава, графику 132 событий и ситуаций, средство 134 управления временем прибытия и клавиши 136 управления. Аналогичная информация, как пояснено выше, также предоставляется на этом дисплее. Этот дисплей 68 также предоставляет клавиши 138 управления, чтобы позволить оператору выполнить перепланирование, а также отсоединять 140 пример настоящего изобретения.
Фиг.10 показывает другой примерный вариант осуществления дисплея. Типичная информация для современного локомотива, включающая в себя состояние 72 пневматического тормоза, аналоговый спидометр с цифровым входным каналом 74 и информацию о тяговом усилии в фунтах (или тяговых усилителях для локомотивов на постоянном токе), видна. Индикатор 74 показывает текущую оптимальную скорость в выполняемом плане, а также график акселерометра, чтобы дополнить показания в милях/мин. Важные новые данные для оптимального выполнения плана находятся в центре экрана, в том числе график 76 с полосой прокрутки со значением оптимальной скорости и настройки положений контроллера в зависимости от расстояния, в сравнении с текущей историей этих переменных. В этом примерном варианте осуществления местоположение железнодорожного состава извлекается с помощью элемента определения местоположения. Как проиллюстрировано, местоположение предоставляется для идентификации того, насколько далеко железнодорожный состав находится от конечного пункта назначения, абсолютной позиции, начального пункта назначения, промежуточной точки и/или ввода оператора.
Ленточная диаграмма предоставляет просмотр вперед изменений скорости, необходимых для того, чтобы следовать оптимальному плану, что используется при ручном управлении и мониторинге плана в сравнении с фактом в ходе автоматического управления. Как поясняется в данном документе, к примеру, будучи в обучающем режиме, оператор может следовать либо положению контроллера управления, либо скорости, предлагаемой посредством примера настоящего изобретения. Вертикальная линейка дает графическую иллюстрацию требуемого и фактического положения контроллера управления, которое также отображается в цифровой форме под ленточной диаграммой. Когда используется непрерывная мощность, задаваемая положением контроллера, как описано выше, дисплей просто округляет до ближайшего дискретного эквивалента, дисплеем может быть аналоговый дисплей, так что отображается аналоговый эквивалент или процент, либо фактические лошадиные силы/тяговое усилие.
Критичная информация по состоянию рейса отображается на экране и показывает текущий уклон, который преодолевает 88 железнодорожный состав, либо ведущим локомотивом, либо другим участком в железнодорожном составе или среднее по длине железнодорожного состава. Совокупное расстояние, пройденное по плану 90, совокупное потребленное топливо 92, местоположение или расстояние до следующей остановки, как запланировано 94, а также раскрывается текущее и отображается ожидаемое время 96 прибытия на следующую остановку. Дисплей 68 также показывает минимальное возможное время до пункта назначения с доступными вычисленными планами. Если требуется более позднее прибытие, выполняется перепланирование. Данные дельты плана показывают состояние по топливу и расписание с опережением или отставанием от текущего оптимального плана. Отрицательные числа означают меньшее количество топлива или опережение в сравнении с планом, положительные числа означают большее количество топлива или отставание в сравнении с планом. Типично эти параметры согласуются в противоположных направлениях (замедление, для того чтобы сэкономить топливо, приводит к запаздыванию железнодорожного состава, и наоборот).
Эти дисплеи 68 всегда дают оператору снимок экрана состояния рейса в отношении текущего установленного плана движения. Этот дисплей служит только для иллюстративных целей, поскольку может быть множество других способов отображения/передачи этой информации оператору и/или в диспетчерскую. С этой целью любые другие элементы информации, раскрытые выше, могут добавляться на дисплей, чтобы предоставлять отображение, которое отличается от раскрытого.
Другие признаки, которые могут быть включены в примеры настоящего изобретения, включают в себя, но не только, формирование журналов данных и отчетов. Эта информация может быть сохранена в железнодорожном составе и загружена во внешнюю систему. Загрузка может осуществляться посредством ручной и/или беспроводной передачи. Эта информация также может просматриваться оператором через дисплей в локомотиве. Данные могут включать в себя такую информацию, как, но не только, вводимые оператором данные, данные функционирования системы учета времени, сэкономленное топливо, дисбаланс топлива в локомотивах железнодорожного состава, движение железнодорожного состава с отклонением от курса и системные диагностические проблемы, такие как неполадки GPS-датчиков.
Поскольку планы рейсов также должны учитывать допустимое рабочее время экипажа, примеры настоящего изобретения могут рассматривать данную информацию во время планирования рейса. Например, если максимальное время, которое может работать экипаж, составляет восемь часов, то рейс может быть приспособлен так, чтобы включать в себя место остановки, чтобы новый экипаж заменил текущий экипаж. Такие заданные места остановок могут включать в себя, но не только, железнодорожные станции, места встреч/проходов и т.д. Если, по мере того как проходит рейс, время рейса может быть превышено, примеры настоящего изобретения могут быть переопределены оператором, чтобы удовлетворять другим критериям, определенным оператором. В завершение, вне зависимости от рабочих состояний железнодорожного состава, таких как, но не только, высокая нагрузка, низкая скорость, состояния растягивания железнодорожного состава и т.д., оператор продолжает управлять так, чтобы отдавать команды для поддержания безопасной скорости и/или рабочего состояния железнодорожного состава.
Используя примерный вариант осуществления настоящего изобретения, железнодорожный состав может функционировать при множестве различных операционных концепций. В одной операционной концепции пример настоящего изобретения предоставляет команды для управления поступательным движением и динамическим торможением. Машинист управляет всеми остальными функциями железнодорожного состава. В другой операционной концепции пример настоящего изобретения предоставляет команды для управления только поступательным движением. Машинист управляет динамическим торможением и всеми остальными функциями железнодорожного состава. В еще одной другой операционной концепции пример настоящего изобретения предоставляет команды для управления поступательным движением, динамическим торможением и применением пневматического тормоза. Машинист управляет всеми остальными функциями железнодорожного состава.
Пример настоящего изобретения также может уведомлять оператора о предстоящих интересующих элементах или действиях, которые должны быть предприняты, таких как логика прогнозирования примера настоящего изобретения, непрерывные корректировки и перепланирование оптимизированного плана рейса, базы данных железнодорожных путей. Машинист также может уведомляться о предстоящих переездах, сигналах, изменениях уклона, тормозных действиях, запасных путях, железнодорожных станциях, заправочных станциях и т.д. Эти оповещения могут предоставляться в звуковой форме и/или посредством интерфейса оператора.
В частности, используя основанную на физике модель планирования, информацию конфигурации железнодорожного состава, бортовую базу данных железнодорожных путей, бортовые правила управления, систему определения местоположения, управление мощностью/тормозами с замкнутым контуром в реальном времени и обратную связь от датчиков, система представляет и/или оповещает оператора о необходимых действиях. Уведомление может быть визуальным и/или звуковым. Примеры включают в себя уведомления о переездах, которые требуют от оператора активировать сирену и/или звонковое устройство локомотива, и "тихих" переездах, которые не требуют от оператора активировать сирену или звонковое устройство локомотива.
В другом примерном варианте осуществления, используя основанную на физике модель планирования, описанную выше, информацию конфигурации железнодорожного состава, бортовую базу данных железнодорожных путей, бортовые правила управления, систему определения местоположения, управление мощностью/тормозами с замкнутым контуром в реальном времени и обратную связь от датчиков, пример настоящего изобретения может предоставлять оператору информацию (к примеру, индикатор на дисплее), которая дает возможность оператору видеть, когда железнодорожный состав прибывает в различные места, как проиллюстрировано на фиг.9. Система дает возможность оператору корректировать план рейса (целевое время прибытия). Эта информация (фактическое оцененное время прибытия или информация, требуемая для того, чтобы извлекать внешним образом) также может передаваться в диспетчерский центр, чтобы дать возможность диспетчеру или диспетчерской системе корректировать целевое время прибытия. Это позволяет системе быстро корректировать и оптимизировать соответствующую целевую функцию (например, компромиссное отношение скорость/расход топлива).
На основе информации, предоставляемой выше, примерные варианты осуществления изобретения могут быть использованы для того, чтобы определять местоположение железнодорожного состава 31 на железнодорожном пути, этап 18. Определение характеристик железнодорожного состава также может осуществляться, к примеру, посредством блока 65 оценки параметров железнодорожного состава. План рейса может быть создан на основе местоположения железнодорожного состава, характеристик железнодорожного пути и рабочих состояний по меньшей мере одного локомотива железнодорожного состава. Более того, требование по оптимальной мощности может быть передано в железнодорожный состав, при этом оператор железнодорожного состава может быть направлен в локомотив, локомотивный состав и/или железнодорожный состав в соответствии с оптимальной мощностью, к примеру, посредством системы 47 беспроводной связи. В другом примере вместо направления оператора железнодорожного состава 31 локомотивный состав 18 и/или локомотив могут управляться автоматически на основе настройки оптимальной мощности.
Дополнительно, способ может влечь за собой определение настройки мощности или команд 14 мощности для локомотивного состава 18 на основе плана рейса. Локомотивный состав 18 затем управляется на соответствующей настройке мощности. Рабочие параметры железнодорожного состава и/или локомотивного состава могут быть собраны, такие как, но не только, фактическая скорость железнодорожного состава, фактическая настройка мощности локомотивного состава и местоположение железнодорожного состава. По меньшей мере, один из этих параметров может быть сравнен с настройкой мощности, на которой локомотивному составу скомандовано функционировать.
В другом варианте осуществления способ может повлечь за собой определение рабочих параметров 62 железнодорожного состава и/или локомотивного состава. Требуемый рабочий параметр определяется на основе определенных рабочих параметров. Определенный параметр сравнивается с рабочим параметром. Если обнаружена разность, план рейса корректируется, этап 24.
Другой вариант осуществления может включать в себя способ, когда определяется местоположение железнодорожного состава 31 на железнодорожном пути 34. Характеристика железнодорожного пути 34 также определяется. План рейса, или план управления, разрабатывается или формируется так, чтобы минимизировать потребление топлива. План рейса может быть сформирован на основе местоположения железнодорожного состава, характеристики железнодорожного пути и/или рабочего состояния локомотивного состава 18 и/или железнодорожного состава 31. В аналогичном способе после того, как местоположение железнодорожного состава определено на железнодорожном пути и характеристика железнодорожного пути известна, команды управления поступательным движением и/или положением контроллера управления предоставляются с тем, чтобы минимизировать потребление топлива.
Хотя описание ниже раскрывает пополнение базы данных, выполняемое в отношении блока оптимизации рейса, использование пополнения базы данных с оптимизацией рейса не обязательно должно осуществляться. Таким образом, оптимизированный план рейса не обязательно должен быть обновляемым на основе пополняемой базы данных. Вместо этого пополненная база данных может быть использована для будущих оптимизированных планов рейса.
Как описано выше, различные алгоритмы блока оптимизации рейса используют информацию по железнодорожному пути и/или железнодорожного состава (здесь железнодорожного пути/железнодорожного состава) (в одном варианте осуществления сохраненную в базе 63 данных по фиг.7) для того, чтобы планировать оптимизированный рейс по отдельным сегментам железнодорожного пути, совместно формируя оптимизированный рейс железнодорожного состава вдоль маршрута железнодорожного пути, содержащего несколько сегментов железнодорожных путей. Алгоритмы определяют траекторию скорости железнодорожного состава и в варианте осуществления с замкнутым контуром управляют железнодорожным составом согласно этой траектории. Альтернативно, блок оптимизации сообщает оператору железнодорожного состава требуемую оптимальную траекторию скорости в ходе рейса, позволяя оператору управлять железнодорожным составом согласно представленной траектории. Тем не менее, оператор может извещаться о рабочих условиях, которые мотивируют его отклониться от представленной оптимальной траектории.
Согласно одному варианту осуществления изобретения информация базы данных железнодорожных путей, содержащая элементы, характеризующие железнодорожные пути, обновляется и вставляется в процесс корректировки плана (как представлено посредством этапа 26 на фиг.1) и/или вставляется в процесс перепланирования (как представлено посредством этапа 24 на фиг.1), чтобы улучшить результаты оптимизации. Скорректированный план или новый план повышает эффективность потребления топлива локомотивом (или другой параметр, который оптимизируется согласно блоку оптимизации рейса в примере настоящего изобретения), чтобы реализовать операционное преимущество или экономию для железнодорожного состава или железнодорожной сети.
Информация характеризации железнодорожного пути содержит допустимую скорость, ограничения скорости, уклон железнодорожного пути, возраст железнодорожного пути, состояние железнодорожного пути, погодные условия и т.д., дополнительно включая любую информацию по железнодорожному пути, которая влияет на способность продвигать локомотив вперед или останавливать локомотив (к примеру, коэффициент трения железнодорожного пути) на железнодорожном пути.
Данные железнодорожного состава также могут быть сохранены в базе 63 данных. Например, тяговое усилие и тормозное усилие, применяемые железнодорожным составом по мере того, как он проходит сегмент железнодорожного пути, могут быть определены и сохранены в базе 63 данных для использования посредством алгоритма блока оптимизации, чтобы сформировать траекторию скорости. Например, если железнодорожный состав замедляется в конкретном месте на железнодорожном пути вследствие проблемы на путях, блок оптимизации рейса может соответствующим образом замедлять железнодорожный состав в той же зоне в следующих рейсах по данному сегменту железнодорожного пути. Блок оптимизации рейса тем самым создает план, который является более реалистичным и соответствует фактическому движению железнодорожного состава по сегменту железнодорожного пути. Альтернативно, блок оптимизации рейса может учесть и запланировать рейс соответствующим образом либо скорректировать базу данных железнодорожных путей с учетом будущих применений.
После того как проблема на железнодорожных путях разрешена, железнодорожный состав, перемещающийся по поврежденным железнодорожным путям, определяет то, что проблема разрешена, обновляет свою базу данных соответствующим образом и предоставляет обновленную информацию путей в другие железнодорожные составы, назначенные для того, чтобы перемещаться по сегменту железнодорожного пути, и/или в удаленное центральное хранилище, откуда обновленная информация по железнодорожному пути может быть использована при формировании оптимальных планов рейсов для других железнодорожных составов. Блок оптимизации железнодорожного состава затем может оптимизировать прохождение по этому сегменту железнодорожного пути без ограничений, вызываемых поврежденным железнодорожным путем.
Согласно примерному варианту осуществления настоящего изобретения обновленная или более свежая информация характеризации железнодорожного пути сохраняется в базе 63 данных и предоставляется в алгоритм блока оптимизации рейса, чтобы обновлять и повышать точность базы данных железнодорожных путей. Например, информация высоты железнодорожного пути над уровнем моря, сохраненная в базе 63 данных, может включать в себя фактическое измерение высоты над уровнем моря в предварительно определенном случае, таком как, но не только, конкретное расстояние, например, каждую милю, каждая точка, когда уклон изменяется, и/или каждый раз, когда кривизна железнодорожного пути изменяется, при этом значения высоты над уровнем моря интерполируются между двумя последними точками данных высоты над уровнем моря. Чтобы повысить точность информации высоты над уровнем моря и избежать интерполированных оценок, согласно одному варианту осуществления изобретения информация местоположения, например, определенная посредством информации местоположения GPS (глобальной системы позиционирования), включающая в себя географическое местоположение и высоту над уровнем моря местоположения, определяется и предоставляется в базу 63 данных. Эта информация может собираться в реальном времени, по мере того как железнодорожный состав проходит по сегменту железнодорожного пути, и загружаться непосредственно в базу 63 данных. Информация также может собираться посредством персонала железнодорожного состава (к примеру, специалистов по обслуживанию железнодорожного пути) и предоставляться в центральный репозиторий для последующей загрузки в базу 63 данных либо предоставляться в любую базу данных, из которой алгоритм, описанный выше, извлекает информацию путей для того, чтобы вычислять оптимальную траекторию рейса. Улучшенная информация высоты над уровнем моря должна формировать более точную, следовательно, более эффективную траекторию скорости, повышая эффективность использования топлива железнодорожным составом.
В другом варианте осуществления изобретения различные датчики, установленные на локомотиве, вагоне или устройстве в конце железнодорожного состава, измеряют эти условия, относящиеся к железнодорожному пути, и предоставляют данные, касающиеся измеренных условий, для сохранения в базе 63 данных. Например, видео- или фотокамера, установленная на локомотиве, собирает данные по железнодорожному пути для последующего анализа и интерпретации. Результаты анализа выгружаются в базу 63 данных всех железнодорожных составов, проходящих по данному сегменту железнодорожного пути.
Выгруженная информация по железнодорожному пути может быть использована локально, т.е. посредством сбора железнодорожным составом информации для того, чтобы пересматривать выполняющийся план рейса в реальном времени. Информация также может выгружаться в другие железнодорожные составы или центральный репозиторий для использования вместе с оптимизированными планами рейсов для других железнодорожных составов, которые впоследствии проходят данный сегмент железнодорожного пути.
Обновленная информация, предоставленная посредством нескольких железнодорожных составов, проходящих по сегменту железнодорожного пути, может агрегироваться для использования при создании будущих планов рейсов. Агрегированные данные могут быть проанализированы на предмет трендов или возможных условий. Например, если информация железнодорожного пути указывает конкретные вероятные погодные условия в течение конкретного интервала времени для конкретного сегмента железнодорожного пути, процесс и алгоритм оптимизации рейса может учитывать влияние этих погодных/сезонных условий при создании планов рейса для этого сегмента железнодорожного пути в течение конкретного интервала времени. Несмотря на то, что погодные условия могут отличаться от предполагаемых условий, когда железнодорожный состав фактически проходит данный сегмент железнодорожного пути, блок оптимизации рейса оптимизировал большую часть рейсов в данном сегменте в течение интересующего интервала времени.
В другом варианте осуществления тяговое усилие, тормозное усилие, инерция и/или скорость используются для того, чтобы определять уклон железнодорожного пути. В любой позиции положения контроллера (включая позицию холостого хода) на скорость изменения скорости железнодорожного состава влияет сопротивление и уклон железнодорожного пути. Чтобы определить уклон железнодорожного пути, определяется частота изменения скорости и сравнивается с ожидаемым изменением скорости. Несовпадение указывает на то, что принятый уклон железнодорожного пути неправильный.
Несовпадение может быть подтверждено несколькими железнодорожными составами для статистической значимости, а также для того, чтобы удостовериться, что ошибка возникла вследствие оценки по причине ошибок датчиков или других шумовых параметров, таких как ветер/сопротивление. Любое отклонение от ожидаемого/запроектированного может означать, что предполагаемые параметры железнодорожного состава (вес, сопротивление, длина и т.д.) и/или параметры железнодорожного пути (уклон, кривизна и т.д.) являются некорректными. Параметры железнодорожного состава, если считаются ошибочными, в общем, обнаруживаются в ходе всего рейса или значительной части рейса, тогда как несовпадения параметров железнодорожного пути обычно обнаруживаются только в точках несовпадения. Определение несовпадений параметров железнодорожного состава может повысить остаток эффективности рейса или может быть использовано для того, чтобы корректировать будущие рейсы, если имеется согласованное несовпадение. Каждый раз, когда определяется ошибка параметра железнодорожного состава, она может быть использована в оставшейся части рейса. Тем не менее, если коэффициент сопротивления, предполагаемый для всех железнодорожных составов конкретного типа, ошибочный, то будущие планы для всех железнодорожных составов данного типа могут быть скорректированы.
Значение инерции может считаться постоянным в ходе рейса, и следовательно, информация рабочих характеристик железнодорожного состава может подтверждать то, корректно ли значение инерции, предполагаемая инерция может быть использована для вычислений уклона железнодорожного пути. Например, каждый раз, когда происходит изменение тягового усилия, соответствующее изменение ускорения определяет инерцию железнодорожного состава (при условии, что нет изменения уклона в то время, когда есть изменение тягового усилия). Более того, влияние изменения уклона имеет постепенное влияние на ускорение железнодорожного состава, поскольку взвешенный средний уклон диктует изменения ускорения. Например, изменение тягового усилия может наблюдаться при каждом изменении положения контроллера, и поскольку несколько наблюдений может быть выполнено, влияние изменений уклона и сопротивления может быть усреднено до нуля. Когда инерция известна, уклон может быть определен на основе отклонения ускорения от ожидаемого ускорения при условии, что коэффициент сопротивления при этом не изменился. Аналогично, предполагаемое значение сопротивления может быть сравнено с рабочим до и после интересующей точки. Предполагаемое значение сопротивления также может быть определено из многих железнодорожных составов, проходящих по этому сегменту.
В другом примере несколько железнодорожных составов, проходящих по железнодорожному пути, могут столкнуться с неожиданной пробуксовкой колес. Анализ собранных данных может указывать неполадки в системе смазки путей. Блок оптимизации рейса может включать это условие пробуксовки в план рейса. Когда система смазки восстановлена, последующие железнодорожные составы, проходящие по железнодорожному пути, не указывают на чрезмерную пробуксовку колес, и база данных железнодорожных путей обновляется соответствующим образом, в ответ на что блок оптимизации рейса удаляет это условие из процесса планирования рейса. Аналогично, могут собираться данные о погодных условиях, которые могут влиять на время движения. Блок оптимизации рейса может включать погодные условия в план рейса. Когда погодные условия улучшаются, база данных железнодорожных путей может быть обновлена, при этом блок оптимизации рейсов удаляет это условие из процесса планирования рейса.
Для локомотивов, оснащенных системой восприятия сигналов, информация сигналов для дальнейшей перегонной блокировки железнодорожного пути впереди текущего перегона железнодорожного пути также может быть предоставлена в блок оптимизации рейса. Перегонное оборудование также может быть использовано для того, чтобы определять и предоставлять обновленную информацию железнодорожных путей в базу 63 данных. Например, придорожное оборудование может определять конкретные состояния вагонов и железнодорожных составов (к примеру, температуру подшипников колес, число вагонов и валов в железнодорожном составе, профиль колеса) и передавать эту информацию в железнодорожный состав, по мере того как он проезжает мимо придорожного оборудования. Устройство в конце железнодорожного состава может быть оснащено датчиками для того, чтобы определять информацию железнодорожных путей, и устройством связи, чтобы предоставлять эту информацию в базу 63 данных.
Инерция железнодорожного состава, применяемое оператором тяговое усилие, применяемое оператором тормозное усилие, скорость локомотива, расстояние локомотива от известного места, барометрическое давление, информация видеокамеры локомотива (т.е. из установленной в железнодорожном составе видеокамеры) и ввод данных оператором по конкретным сегментам железнодорожного пути могут быть сохранены в базе 63 данных и использованы посредством алгоритма оптимизации рейса для того, чтобы улучшать процесс оптимизации. Данная рабочая информация может быть собрана посредством всех железнодорожных составов, проходящих по сегменту железнодорожного пути. Каждый железнодорожный состав может предоставлять собранную информацию в базу 63 данных для использования посредством блока оптимизации рейса, выполняющегося в железнодорожном составе.
Дополнительно, чтобы дать возможность другим железнодорожным составам, которые могут впоследствии проходить сегмент железнодорожного пути, воспользоваться преимуществом этой информации, собранная информация выгружается в базу данных, к которой имеют доступ все железнодорожные составы или к которой алгоритм оптимизации рейса осуществляет доступ, когда он подготавливает оптимизированные планы рейсов для железнодорожных составов, перемещающихся по интересующему сегменту железнодорожного пути. Хотя эти дополнительные входные данные не обязательно могут приводить к более оптимальной траектории решения, они приводят к более точной траектории в отношении фактического применения тормозного и тягового усилия оператором в интересующем сегменте железнодорожного пути.
Определенные собранные рабочие данные железнодорожного состава, как описано выше, могут быть использованы непосредственно блоком оптимизации рейса. Например, высота над уровнем моря железнодорожного пути непосредственно влияет на потребление топлива и может быть использована посредством алгоритма оптимизации для того, чтобы более точно определять потребление топлива и тем самым оптимизировать потребление топлива.
Конкретные характеристики железнодорожного пути вычисляются из собранных рабочих данных. Определенные характеристики железнодорожного пути затем используются в алгоритмах оптимизации. Например, измеренная мощность (тяговое усилие или позиция контроллера) и ускорение используются для того, чтобы определять уклон железнодорожного пути в конкретном месте в сегменте железнодорожного пути. Вычисленный уклон затем используется посредством алгоритма оптимизации.
Фиг.11 иллюстрирует информацию характеризации железнодорожного пути, которая может предоставляться, когда железнодорожный состав проходит по сегменту железнодорожного пути. С помощью дополнительной предоставленной информации блок оптимизации рейса может более точно проиллюстрировать условия, с которыми сталкивается железнодорожный состав в интересующем сегменте железнодорожного пути, и тем самым сформировать более реалистичную и эффективно оптимизированную траекторию скорости.
Когда база 63 данных железнодорожных путей обновляется согласно различным способам, описанным в данном документе, новые данные могут быть использованы для планирования будущих рейсов в интересующем сегменте железнодорожного пути и/или перепланирования текущего рейса. Перепланирование текущего рейса может быть особенно важным, если есть большое различие между одним или более значениями, используемыми для того, чтобы первоначально спланировать рейс, и впоследствии определенным значением этого параметра.
Фиг.12 иллюстрирует блок-схему последовательности операций примерных этапов управления железнодорожным составом в ходе рейса по сегменту железнодорожного пути. Блок-схема 200 последовательности операций способа включает в себя определение информации по сегментам железнодорожного пути, этап 210. Выполняется определение местоположения железнодорожного состава на железнодорожном пути или время с начала рейса, этап 220. Информация по сегментам железнодорожного пути сохраняется, этап 230. По меньшей мере, одно рабочее состояние по меньшей мере одного из локомотивов определяется, этап 240. Создается план рейса, который зависит от местоположения железнодорожного состава, информации по сегментам железнодорожного пути, по меньшей мере, одного рабочего условия, чтобы оптимизировать функционирование локомотива в соответствии с одним или более рабочими критериями для железнодорожного состава, этап 250. Система и/или способ оптимизации рейса, описанные выше, могут быть использованы при создании плана рейса. План рейса может быть пересмотрен на основе информации по сегментам железнодорожного пути и/или информации железнодорожных составов, собранной в ходе рейса, этап 260. Как описано выше, эта блок-схема последовательности операций способа может быть реализована с помощью компьютерного программного кода.
Хотя изобретение описано со ссылкой на примерный вариант осуществления, специалисты в данной области техники должны понимать, что могут быть выполнены различные изменения, исключения и/или дополнения, и его элементы могут быть заменены на эквиваленты без отступления от сущности и объема изобретения. Помимо этого, может быть выполнено множество модификаций, чтобы приспособить конкретную ситуацию или материал к идее изобретения без отступления от его объема. Поэтому подразумевается, что изобретение не будет ограничено конкретным вариантом осуществления, раскрытым как оптимальный режим, предполагаемый для выполнения данного изобретения, а изобретение будет включать в себя все варианты осуществления, подпадающие под объем прилагаемой формулы изобретения. Более того, если явно не указано иное, использование терминов "первый", "второй" и т.д. не обозначает какого-либо порядка или важности, а вместо этого термины "первый", "второй" и т.д. используются для того, чтобы отличать один элемент от другого.
СПИСОК УЗЛОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РЕЙСА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2481988C2 |
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РЕЙСА ДЛЯ ПОЕЗДА | 2007 |
|
RU2484994C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ ПАРАМЕТРОВ МНОЖЕСТВА ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ, ДЕЙСТВУЮЩИХ В ЖЕЛЕЗНОДОРОЖНЫХ СЕТЯХ С МНОЖЕСТВОМ ПЕРЕСЕЧЕНИЙ | 2007 |
|
RU2466049C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ РАБОТЫ ПОЕЗДА С УЧЕТОМ ПАРАМЕТРОВ ВАГОНА | 2007 |
|
RU2605648C2 |
| СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ ДВИЖЕНИЯ ПОЕЗДА | 2007 |
|
RU2501695C2 |
| СИСТЕМА И СПОСОБ ДЛЯ ОПТИМИЗАЦИИ РАБОТЫ ПОЕЗДА С УЧЕТОМ ПАРАМЕТРОВ ВАГОНА | 2007 |
|
RU2470814C2 |
| МНОГОУРОВНЕВАЯ СИСТЕМА И СПОСОБ ОПТИМИЗАЦИИ РАБОТЫ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2004 |
|
RU2359857C2 |
| СПОСОБ И СИСТЕМА ДЛЯ УСОВЕРШЕНСТВОВАНИЯ ТЕХНИКИ ВОЖДЕНИЯ ПОЕЗДОВ И СНИЖЕНИЯ РАСХОДА ТОПЛИВА | 2006 |
|
RU2409484C2 |
| СИСТЕМА МАНЕВРОВОЙ АВТОМАТИЧЕСКОЙ ЛОКОМОТИВНОЙ СИГНАЛИЗАЦИИ (МАЛС) | 2008 |
|
RU2369509C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ БЕЗОПАСНОСТИ ДВИЖЕНИЯ ПОЕЗДА, МАНЕВРОВОГО СОСТАВА ИЛИ ОДИНОЧНОГО ЛОКОМОТИВА ПО СТАНЦИИ И НА ПОДХОДАХ К НЕЙ | 2007 |
|
RU2352487C1 |











Изобретение относится к системе и способу оптимизации движения железнодорожного состава, а более конкретно к системе и способу пополнения и обновления базы данных железнодорожных составов/путей, связанной с системой. Техническим результатом является оптимизация движения железнодорожного состава. Система для предоставления информации по железнодорожному составу и информации характеризации железнодорожного пути для использования при функционировании железнодорожного состава включает в себя первый элемент, определяющий местоположение железнодорожного состава на сегменте железнодорожного пути и/или время с начала рейса. Также система включает элемент характеризации железнодорожного пути, предоставляющий информацию по сегментам железнодорожного пути, и датчик для измерения рабочего режима локомотива в железнодорожном составе. В системе предусмотрена база данных для хранения информации по сегментам железнодорожного пути и/или рабочего состояния локомотива. Также включен процессор, коррелирующий информацию от элементов, входящих в состав системы. Используя базу данных, создают план рейса, который оптимизирует функционирование железнодорожного состава в соответствии с одним или более рабочими критериями для железнодорожного состава. 4 н. и 33 з.п. ф-лы, 12 ил.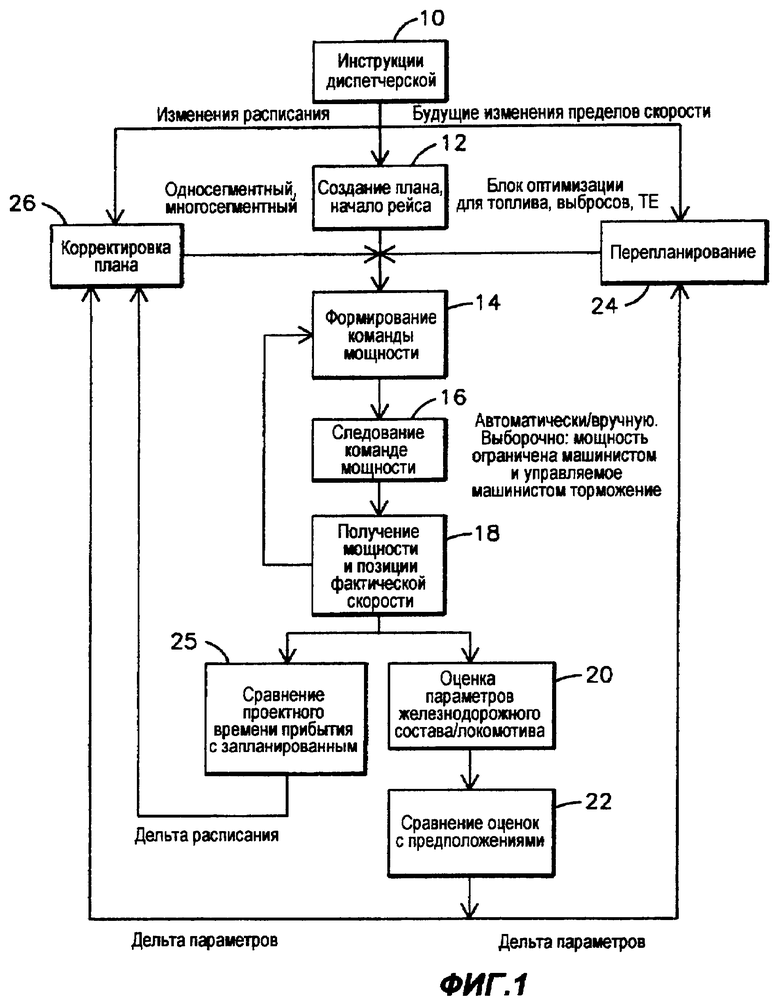
1. Система для предоставления, по меньшей мере, одной из информации по железнодорожному составу и информации характеризации железнодорожного пути для использования при улучшении функционирования отдельного железнодорожного состава, причем система содержит:
а. первый элемент для того, чтобы определять, по меньшей мере, одно из местоположения железнодорожного состава на сегменте железнодорожного пути и времени с начала рейса;
b. элемент характеризации железнодорожного пути, чтобы предоставлять обновленную информацию по сегменту железнодорожного пути;
с. датчик для измерения рабочего состояния, по меньшей мере, одного из локомотивов в железнодорожном составе;
d. базу данных для хранения, по меньшей мере, одной обновленной информации по сегменту железнодорожного пути и, по меньшей мере, одного рабочего состояния, по меньшей мере, одного из локомотивов; и
е. процессор для того, чтобы коррелировать информацию от первого элемента, элемента характеризации железнодорожного пути, датчика и базы данных таким образом, чтобы база данных могла быть использована для создания плана рейса на борту железнодорожного состава, который оптимизирует функционирование отдельного железнодорожного состава в соответствии с одним или более рабочих критериев для этого железнодорожного состава.
2. Система по п.1, в которой обновленная информация по сегменту железнодорожного пути или информация по железнодорожному составу, которая поддерживается и обрабатывается системой, содержит, по меньшей мере, одно из изменения в ограничении скорости, уклона железнодорожного пути, кривизны железнодорожного пути, схемы движения по сегменту железнодорожного пути, разрешенной скорости, фактической скорости, ограничений скорости, возраста железнодорожного пути, состояния железнодорожного пути, погодных условий, тягового усилия и тормозного усилия.
3. Система по п.1, дополнительно содержащая элемент связи для предоставления обновленной информации по сегменту железнодорожного пути за пределы железнодорожного состава для использования процессором других железнодорожных составов, проходящих этот сегмент железнодорожного пути.
4. Система по п.3, в которой элемент связи предоставляет, по меньшей мере, одно из обновленной информации по сегменту железнодорожного пути и рабочего состояния, по меньшей мере, одного из локомотивов на удаленную площадку, и при этом на удаленной площадке обновленная информация по сегменту железнодорожного пути используется для того, чтобы создавать план рейсов для других железнодорожных составов, проходящих этот сегмент железнодорожного пути.
5. Система по п.3, в которой элемент связи содержит придорожный элемент связи для предоставления обновленной информации по сегменту железнодорожного пути другим железнодорожным составам посредством этого придорожного элемента связи.
6. Система по п.1, в которой обновленная информация по сегменту железнодорожного пути, которая поддерживается и обрабатывается системой, содержит любое состояние железнодорожного пути, которое влияет на способность толкать локомотив вперед или останавливать локомотив.
7. Система по любому из пп.1-6, в которой оптимизация функционирования отдельного железнодорожного состава или локомотива включает в себя минимизацию расхода топлива.
8. Система по любому из пп.1-6, в которой обновленная информация по сегменту железнодорожного пути поддерживается множеством железнодорожных составов, проходящих этот сегмент железнодорожного пути.
9. Система по любому из пп.1-6, в которой оптимизация функционирования отдельного железнодорожного состава соответствует стандартам по локальным выбросам.
10. Система для управления железнодорожным составом в ходе рейса по сегменту железнодорожного пути, при этом железнодорожный состав содержит один или более локомотивных составов, причем каждый локомотивный состав содержит один или более локомотивов, при этом система содержит:
а. первый элемент для того, чтобы определять, по меньшей мере, одно из местоположения железнодорожного состава на сегменте железнодорожного пути и времени с начала рейса;
b. элемент характеризации железнодорожного пути, чтобы предоставлять обновленную информацию по сегменту железнодорожного пути;
с. датчик для измерения рабочего состояния, по меньшей мере, одного из локомотивов;
d. базу данных для хранения, по меньшей мере, одной обновленной информации по сегменту железнодорожного пути и, по меньшей мере, одного рабочего состояния, по меньшей мере, одного из локомотивов; и
е. процессор, выполненный с возможностью принимать информацию, по меньшей мере, от одного из первого элемента, датчика, элемента характеризации железнодорожного пути и базы данных для создания плана рейса на борту железнодорожного состава, который оптимизирует функционирование отдельного локомотива в соответствии с одним или более рабочих критериев железнодорожного состава.
11. Система по п.10, в которой в ходе рейса датчик дополнительно предназначен для измерения, по меньшей мере, одного обновленного рабочего состояния, по меньшей мере, одного из локомотивов в железнодорожном составе.
12. Система по п.10, дополнительно содержащая элемент контроллера для автономного направления железнодорожного состава так, чтобы следовать плану рейса.
13. Система по п.10, в которой оператор направляет железнодорожный состав в соответствии с планом рейса.
14. Система по п.10, в которой процессор создает обновленный план рейса в ходе рейса в ответ на обновленную информацию по сегменту железнодорожного пути и, по меньшей мере, одно обновленное состояние, по меньшей мере, одного из локомотивов в железнодорожном составе.
15. Система по п.10, в которой обновленная информация по сегменту железнодорожного пути или информация по железнодорожному составу, которая поддерживается и обрабатывается системой, содержит, по меньшей мере, одно из изменения ограничения скорости, уклона железнодорожного пути, кривизны железнодорожного пути, схемы движения по сегменту железнодорожного пути, разрешенной скорости, фактической скорости, ограничений скорости, возраста железнодорожного пути, состояния железнодорожного пути, погодных условий, тягового усилия и тормозного усилия.
16. Система по п.10, дополнительно содержащая элемент связи для предоставления обновленной информации по сегменту железнодорожного пути за пределы железнодорожного состава для использования процессором других железнодорожных составов, проходящих этот сегмент железнодорожного пути.
17. Система по п.16, в которой элемент связи предоставляет, по меньшей мере, одно из обновленной информации по сегменту железнодорожного пути и рабочего состояния, по меньшей мере, одного из локомотивов на удаленную площадку, и при этом на удаленной площадке обновленная информация по сегменту железнодорожного пути используется для того, чтобы создавать план рейса для других железнодорожных составов, проходящих этот сегмент железнодорожного пути.
18. Система по п.16, в которой элемент связи содержит придорожный элемент связи для предоставления обновленной информации по сегменту железнодорожного пути другим железнодорожным составам посредством этого придорожного элемента связи.
19. Система по п.10, в которой обновленная информация по сегменту железнодорожного пути, которая поддерживается и обрабатывается системой, содержит любое состояние железнодорожного пути, которое влияет на способность толкать локомотив вперед или останавливать локомотив.
20. Система по п.10, в которой рабочее состояние, по меньшей мере, одного из локомотивов, которое поддерживается и обрабатывается системой, содержит любую информацию локомотива, которая влияет на способность толкать локомотив вперед или останавливать локомотив.
21. Система по п.10, в которой элемент характеризации железнодорожного пути содержит камеру.
22. Система по п.10, в которой оптимизация функционирования отдельного железнодорожного состава или локомотива включает в себя минимизацию расхода топлива.
23. Система по п.10, в которой обновленная информация по сегменту железнодорожного пути поддерживается множеством железнодорожных составов, проходящих этот сегмент железнодорожного пути.
24. Система по п.10, в которой оптимизация функционирования отдельного железнодорожного состава соответствует стандартам по локальным выбросам.
25. Система по п.10, в которой локомотив отслеживает эффективность работы системы и обновляет план рейса на основе фактической измеренной эффективности работы системы.
26. Способ управления железнодорожным составом в ходе рейса по сегменту железнодорожного пути, при этом железнодорожный состав содержит один или более локомотивных составов, причем каждый локомотивный состав содержит один или более локомотивов, при этом способ содержит этапы, на которых:
а. определяют местоположение железнодорожного состава на железнодорожном пути или время с начала рейса;
b. определяют обновленную информацию по сегменту железнодорожного пути;
с. сохраняют обновленную информацию по сегменту железнодорожного пути;
d. определяют, по меньшей мере, одно рабочее состояние, по меньшей мере, одного из локомотивов; и
е. создают план рейса на борту железнодорожного состава в ответ, по меньшей мере, на одно из местоположения железнодорожного состава, обновленной информации по сегменту железнодорожного пути и, по меньшей мере, одного рабочего состояния, чтобы оптимизировать функционирование отдельного локомотива в соответствии с одним или более рабочих критериев для железнодорожного состава.
27. Способ по п.26, дополнительно содержащий этап, на котором пересматривают план рейса в ходе рейса на основе, по меньшей мере, одной обновленной информации по сегменту железнодорожного пути и, по меньшей мере, одного рабочего состояния, по меньшей мере, одного из локомотивов, собранных в ходе рейса.
28. Способ по п.26, дополнительно содержащий этап, на котором пересматривают план рейса в ответ на обновленную информацию по сегменту железнодорожного пути, собранную другими железнодорожными составами, проходящими этот сегмент железнодорожного пути.
29. Способ по п.26, в котором обновленная информация по сегменту железнодорожного пути или информация по железнодорожному составу, которая поддерживается и обрабатывается системой, содержит разрешенную скорость, ограничения скорости, инерцию железнодорожного состава, барометрическое давление, изображения, уклон железнодорожного пути, возраст железнодорожного пути, состояние железнодорожного пути, погодные условия, информацию по железнодорожному пути, влияющую на способность толкать железнодорожный состав вперед, информацию по железнодорожному пути, влияющую на способность останавливать железнодорожный состав, коэффициент трения железнодорожного пути, применяемое тяговое усилие, применяемое тормозное усилие, местоположение и высоту над уровнем моря железнодорожного пути, сигналы для расположенных впереди блоков железнодорожного пути.
30. Способ по п.26, дополнительно содержащий этап, на котором управляют железнодорожным составом в соответствии с планом рейса.
31. Способ по п.26, дополнительно содержащий этап, на котором сообщают оператору железнодорожного состава план рейса, при этом оператор может управлять железнодорожным составом согласно плану рейса.
32. Машиночитаемый носитель, хранящий компьютерный программный код для управления железнодорожным составом, имеющим компьютерный процессор, причем упомянутый код служит для управления железнодорожным составом в ходе рейса по сегменту железнодорожного пути, при этом железнодорожный состав содержит один или более локомотивных составов, причем каждый локомотивный состав содержит один или более локомотивов, причем программный код содержит:
а. программный модуль для определения обновленной информации по сегменту железнодорожного пути;
b. программный модуль для сохранения обновленной информации по сегменту железнодорожного пути;
с. программный модуль для определения, по меньшей мере, одного рабочего состояния одного из локомотивов; и
d. программный модуль для создания плана рейса на борту железнодорожного состава в ответ, по меньшей мере, на одно из местоположения железнодорожного состава, обновленной информации по сегменту железнодорожного пути и, по меньшей мере, одного рабочего состояния, чтобы оптимизировать функционирование отдельного локомотива в соответствии с одним или более рабочих критериев для железнодорожного состава.
33. Машиночитаемый носитель по п.32, в котором компьютерный программный код дополнительно содержит программный модуль для пересмотра плана рейса в ходе рейса на основе, по меньшей мере, одной обновленной информации по сегменту железнодорожного пути и, по меньшей мере, одного рабочего состояния, по меньшей мере, одного из локомотивов, собранных в ходе рейса.
34. Машиночитаемый носитель по п.32, в котором компьютерный программный код дополнительно содержит программный модуль для пересмотра плана рейса в ответ на обновленную информацию по сегменту железнодорожного пути, собранную другими железнодорожными составами, проходящими этот сегмент железнодорожного пути.
35. Машиночитаемый носитель по п.32, в котором обновленная информация по сегменту железнодорожного пути или информация по железнодорожному составу, которая поддерживается и обрабатывается системой, содержит разрешенную скорость, ограничения скорости, инерцию железнодорожного состава, барометрическое давление, изображения, уклон железнодорожного пути, возраст железнодорожного пути, состояние железнодорожного пути, погодные условия, информацию по железнодорожному пути, влияющую на способность толкать железнодорожный состав вперед, информацию по железнодорожному пути, влияющую на способность останавливать железнодорожный состав, коэффициент трения железнодорожного пути, применяемое тяговое усилие, применяемое тормозное усилие, местоположение и высоту над уровнем моря железнодорожного пути, сигналы для расположенных впереди блоков железнодорожного пути.
36. Машиночитаемый носитель по п.32, в котором компьютерный программный код дополнительно содержит программный модуль для управления железнодорожным составом согласно плану рейса.
37. Машиночитаемый носитель по п.32, в котором компьютерный программный код дополнительно содержит программный модуль для сообщения оператору железнодорожного состава плана рейса, при этом оператор может управлять железнодорожным составом согласно плану рейса.
| US 6459964 B1, 01.10.2002 | |||
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |
| ДВУХКАНАЛЬНАЯ СИСТЕМА ДЛЯ РЕГУЛИРОВАНИЯ ДВИЖЕНИЯ ЖЕЛЕЗНОДОРОЖНЫХ ТРАНСПОРТНЫХ СРЕДСТВ | 2004 |
|
RU2286279C2 |

