Изобретение относится к силовой преобразовательной технике, может быть использовано в электроприводе переменного тока, например, для регулирования напряжения тяговых двигателей электрического подвижного состава.
Известен способ управления тяговым приводом переменного тока, содержащий входной четырехквадрантный преобразователь, инвертор напряжения, от которого получает питание асинхронный двигатель, заключающийся в том, что напряжение звена постоянного напряжения во всем диапазоне работы стабилизируют и поддерживают с заданным значением путем регулирования по амплитуде (Патент РФ 2214674).
При таком способе управления высокие энергетические показатели привода обеспечиваются при номинальном значении линейного напряжения тягового двигателя, т.е. когда инвертор напряжения работает в одноимпульсном режиме. При работе двигателя с напряжением нагрузки ниже номинального значения, требуется применение модуляции напряжения с высокой частотой, что приводит к увеличению коммутационных потерь энергии в инверторе.
Кроме того, высокое значение напряжения звена постоянного напряжения при малой нагрузке на валу двигателя вызывает наибольшее искажение форм фазных токов асинхронного двигателя, т.е. ухудшает коэффициент мощности нагрузки.
Известен способ управления тяговым приводом переменного тока (Патент РФ 2183570) с регулируемой частотой вращения, содержащий, по меньшей мере, один трехфазный электродвигатель, рассчитанный на постоянное потребление мощности свыше некоторой заданной частоты вращения и запитываемый от двухзвенного преобразователя переменного тока с изменяемым напряжением промежуточного звена постоянного тока, состоящий в том, что на двухзвенный преобразователь переменного тока подают от сети электроснабжения и напряжение промежуточного звена постоянного тока в диапазоне частот вращения ниже заданной частоты вращения снижают по сравнению с его максимальным значением таким образом, чтобы это напряжение промежуточного звена постоянного тока не снижалось ниже некоторого минимального значения, определяемого напряжением сети в процессе работы, а в диапазоне частот вращения выше заданной частоты вращения исходя из указанного сниженного напряжения промежуточного звена постоянного тока происходит зависящий от частоты вращения переход к максимальному напряжению этого промежуточного звена при максимальной частоте вращения, при этом в указанном тяговом приводе напряжение промежуточного звена постоянного тока при частоте вращения в диапазоне от превышающих заданную частоту вращения до максимальной частоты вращения и при этом в нижнем диапазоне развиваемого приводным двигателем тягового или тормозящего крутящего момента поддерживают, по меньшей мере, в значительной степени, на том его низком значении, которое оно имеет ниже заданной частоты вращения.
Для реализации этого способа управления требуются большие ресурсы системы управления, способные обрабатывать в реальном масштабе времени большой объем информации, с использованием сложного математического аппарата. При этом условия смены режимов работы тягового привода переменного тока характеризуются сложными критериями, что в нестационарных режимах может ухудшить энергетические показатели.
В результате вышеуказанные недостатки, в общем, усложняют качество регулирования электропривода.
Задачей изобретения является снижение требований к ресурсам системы управления тяговым приводом переменного тока за счет использования упрощенных и более четких критериев управления нагрузкой.
Это достигается тем, что регулирование звена постоянного тока (напряжения) тягового электропривода осуществляют в зависимости от напряжения нагрузки для наиболее характерной области рабочих значений, по сформированному диапазону регулирования параметров нагрузки.
Поставленная задача решается тем, что в известный способ управления тяговым приводом переменного тока с регулируемой частотой вращения, содержащим, по меньшей мере, один трехфазный электродвигатель, рассчитанный на постоянное потребление мощности свыше некоторой заданной частоты вращения и запитываемый от двухзвенного преобразователя переменного тока с изменяемым напряжением промежуточного звена постоянного тока, при этом питание на двухзвенный преобразователь переменного тока подают от сети электроснабжения и напряжение промежуточного звена постоянного тока (напряжения) в диапазоне частот вращения ниже заданной частоты вращения снижают по сравнению с его максимальным значением таким образом, чтобы это напряжение промежуточного звена постоянного тока напряжения не снижалось ниже некоторого минимального значения, определяемого напряжением сети в процессе работы, а в диапазоне частот вращения выше заданной частоты вращения исходя из указанного сниженного напряжения промежуточного звена постоянного тока происходит зависящий от частоты вращения переход к максимальному напряжению этого промежуточного звена при максимальной частоте вращения, кроме того, в указанном тяговом приводе напряжение промежуточного звена постоянного тока при частоте вращения в диапазоне от превышающих заданную частоту вращения до максимальной частоты вращения и при этом в нижнем диапазоне развиваемого приводным двигателем тягового или тормозящего крутящего момента поддерживают, по меньшей мере, в значительной степени, на том его низком значении, которое оно имеет ниже заданной частоты вращения, введены следующие отличия: регулирование напряжения звена постоянного тока выполняют исходя из напряжения нагрузки в соответствии с выражением:
- для диапазона скорости от 0 до VСР КВ по формуле 
- для диапазона скорости от VСР КВ до VН по формуле

- для диапазона скорости от VН и выше по формуле 
где  - среднеквадратическое значение линейного напряжения, определяемое по электромеханической характеристике асинхронного двигателя, представляющей собой зависимость линейного напряжения электродвигателя от скорости движения электроподвижного состава;
- среднеквадратическое значение линейного напряжения, определяемое по электромеханической характеристике асинхронного двигателя, представляющей собой зависимость линейного напряжения электродвигателя от скорости движения электроподвижного состава;
UЛi - линейное напряжение двигателя на i-м интервале скорости ΔVi;
ΔVi=Vi-Vi-1 - шаг(интервал) выборки скорости;
Vi - текущее значение скорости на i-м интервале;
Vi-1 - значение скорости на предыдущем интервале;
VMAX - максимальная скорость движения;
n - целое число точек разбиения диапазона скорости на интервалы;
VСР КВ - значение скорости, соответствующее среднеквадратическому значению линейного напряжения двигателя;
VН - номинальная скорость тягового двигателя;
Ud - напряжение звена постоянного тока;
UЛН - номинальное значение линейного напряжения.
При этом линейная скорость движения железнодорожного транспортного средства в размерности км/ч связана с частотой вращения вала двигателя f в размерности об/мин зависимостью:  .
.
где D - диаметр колеса;
μ - передаточное отношение тяговой передачи.
Технический результат - снижение ресурсов системы управления, обеспечение работы тягового электропривода с высокими энергетическими показателями за счет реализации характеристики, соответствующей минимуму электрических потерь в приводе.
На фиг.1 представлена функциональная схема устройства управления тяговым приводом переменного тока, реализующего представленный способ управления.
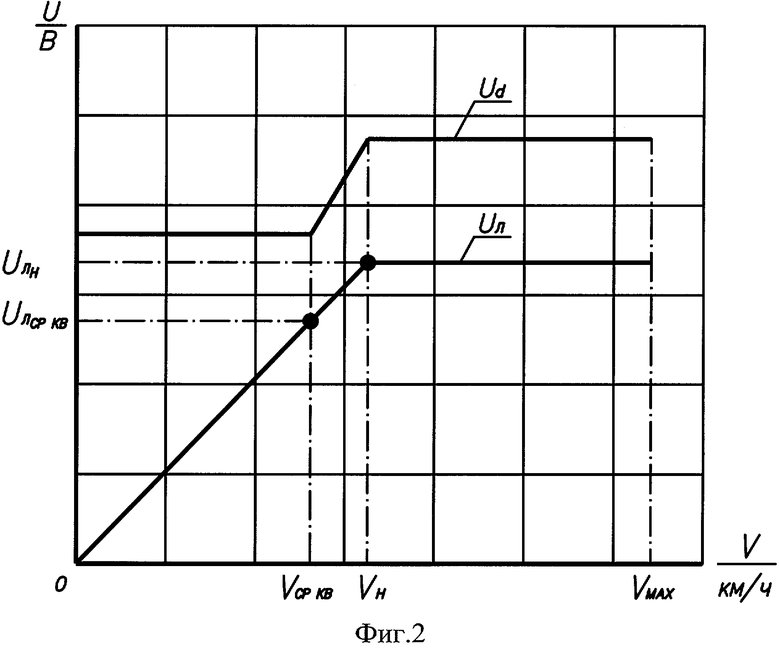
На фиг.2 приведена зависимость напряжения звена постоянного тока тягового привода от линейного напряжения трехфазной нагрузки.
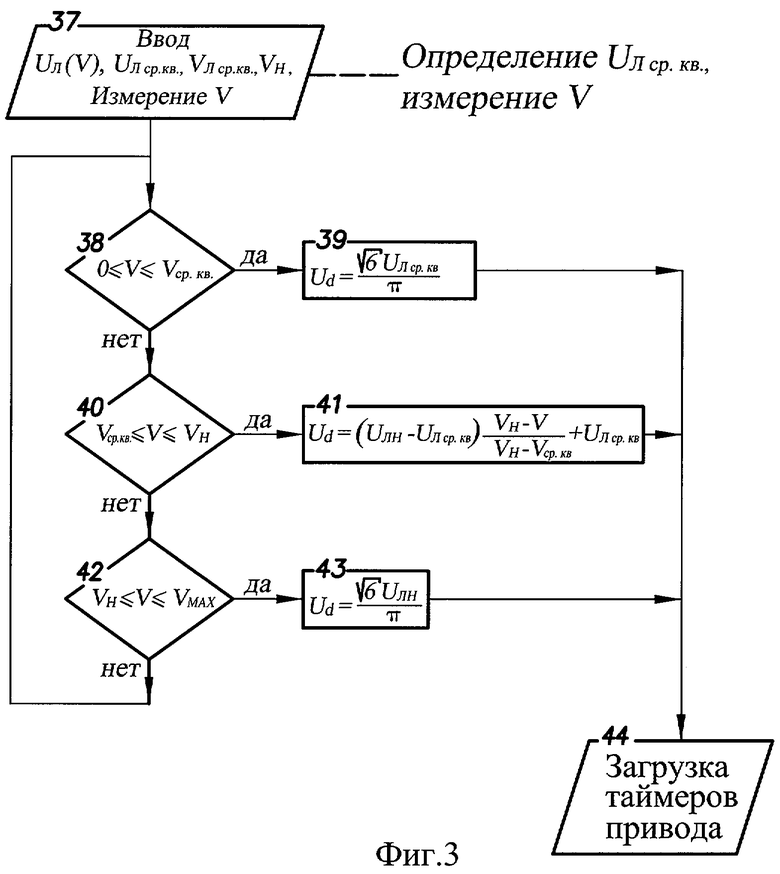
На фиг.3 приведена блок-схема, реализующая представленный способ управления.
Способ реализуют устройством (фиг.1), которое содержит токоприемник 2, подключенный к контактной сети переменного тока 1, однофазный тяговый трансформатор 3, к выходу которого подключен четырехквадрантный преобразователь 4, питающий через звено постоянного тока (напряжения) 5 трехфазный инвертор напряжения (выходной преобразователь) 6, в плечи которого включены фазные обмотки асинхронного двигателя 7. Первичная обмотка трансформатора 3 одним выводом соединена с токоприемником 2, а другим выводом, через колесо 9 транспортного средства с рельсом 10. Вал двигателя 7 жестко соединен с датчиком частоты вращения 8 тягового двигателя 7. Между трансформатором 3 и четырехквадрантным преобразователем 4 установлен датчик тока 11 и датчик напряжения 12. Между четырехквадрантным преобразователем и инвертором напряжения 6 в звене постоянного тока 5 установлен датчик напряжения 13. Между фазами тягового двигателя 7 установлены датчики 14 и 15 фазного напряжения двигателя 7. В двух фазах двигателя 7 установлены датчики фазного тока 16 и 17. Этих датчиков достаточно, чтобы контролировать ток и напряжение во всех фазах. Информационно-управляющая система содержит блок управления входным преобразователем (БУВП) 20 и блок управления инвертором (БУИ) 21. БУВП 20 содержит устройство сопряжения с оборудованием (УСО) 22 входного преобразователя 4 и вычислительно-управляющее устройство (ВУУ) 23. УСО 22 содержит синхронизатор 26 и импульсный усилитель 27. ВУУ 23 входного преобразователя 4 содержит аналогово-цифровой преобразователь (АЦП) 28 и таймер входного преобразователя 29. Центральным вычислительным ядром БУВП 20 является процессор 30.
БУИ 21 содержит УСО 24 инвертора 6 и ВУУ 25 инвертора 6. УСО 24 содержит блок диагностики 31 и импульсный усилитель 33. ВУУ 25 содержит АЦП 32 и таймер 34. Центральным вычислительным ядром БУИ 21 является процессор 35.
Сигналы с датчиков 8, 11-17 поступают по интерфейсу в шину данных-адресов бортовой информационно-управляющей системы 36.
Наличие двух блоков управления тягового привода: БУВП 20 и БУИ 21 обусловлено целесообразностью раздельного управления входным преобразователем 4 и выходным преобразователем - инвертором 6.
АЦП 28, таймер 29 и процессор 30, а также АЦП 31, таймер 34 и процессор 35 могут быть интегрированы по-отдельности, в специализированный контроллер, например, M167-1С (см. каталог продукции "Бортовая промышленная электроника", АО "Каскод", 105037 Москва, Измайловская пл., 7).
Принцип работы тягового привода переменного тока состоит в следующем. На основании фиг.2 форма линейного напряжения нагрузки повторяет электромеханическую характеристику линейного напряжения асинхронного двигателя от скорости движения электроподвижного состава UЛ(V).
Изменение напряжения нагрузки входного преобразователя от скорости движения электроподвижного состава с тяговым приводом переменного тока при изменении нагрузки трехфазных инверторов связано зависимостью Ud(V).
Способ управления реализуют алгоритмом, блок-схема которого приведена на фиг.3. В блоке 37 вводят электромеханическую характеристику двигателя, среднеквадратическое значение линейного напряжения, определяемое по формуле на основании электромеханической характеристики асинхронного двигателя, представляющей собой зависимость линейного напряжения от скорости вращения на валу двигателя, где UЛi - линейное напряжение двигателя на i-м интервале скорости ΔVi;
ΔVi=Vi-Vi-1 - шаг(интервал) выборки скорости;
Vi - текущее значение скорости на i-м интервале;
Vi-1 - значение скорости на предыдущем интервале;
VMAX - максимальная скорость движения,
n - целое число точек разбиения диапазона скорости на интервалы.
При этом линейная скорость движения железнодорожного транспортного средства связана с частотой вращения вала двигателя f, считываемой датчиком 8, зависимостью ,
где D - диаметр колеса (константа);
μ - передаточное отношение тяговой передачи.
Также в блоке 37 задают значение скорости, соответствующее среднеквадратическому значению линейного напряжения, и значение номинальной скорости, а также выполняют измерение текущей скорости движения электроподвижного состава датчиком 8.
Указанные параметры помещают для хранения в процессор 35 блока управления инвертором 21. В блоке 38 сравнивают значение скорости V, полученное по информации с датчика скорости 8, с диапазоном скорости от 0 до VСР КВ. Указанную операцию реализуют БУИ 21. При нахождении скорости в указанном диапазоне величину напряжения звена постоянного тока задают равной  и подают команду на загрузку таймеров 29 и 34 привода (блок 44). Таймер 29 входного преобразователя 4 отрабатывает последовательность импульсов коммутации входного преобразователя 4, который преобразует энергию контактной сети 1 переменного тока, поступающую в звено постоянного тока 5 через токоприемник 2 и силовой трансформатор 3. Другой вывод первичной обмотки силового трансформатора 3 соединен через колесо 9 с рельсом 10. Управление преобразователем 4 выполняют БУВП 20. Приход синхроимпульса выполняют синхронизатором 26 по информации с датчика тока сети 11 и датчика напряжения сети 12. Преобразование сигналов датчиков 11 и 12 в цифровую форму выполняют АЦП 28. Усиление сигналов команд выполняют усилителем 27. Команды на коммутацию преобразователя 4 от процессора 30 передаются в блок драйверов 18 по шине 36.
и подают команду на загрузку таймеров 29 и 34 привода (блок 44). Таймер 29 входного преобразователя 4 отрабатывает последовательность импульсов коммутации входного преобразователя 4, который преобразует энергию контактной сети 1 переменного тока, поступающую в звено постоянного тока 5 через токоприемник 2 и силовой трансформатор 3. Другой вывод первичной обмотки силового трансформатора 3 соединен через колесо 9 с рельсом 10. Управление преобразователем 4 выполняют БУВП 20. Приход синхроимпульса выполняют синхронизатором 26 по информации с датчика тока сети 11 и датчика напряжения сети 12. Преобразование сигналов датчиков 11 и 12 в цифровую форму выполняют АЦП 28. Усиление сигналов команд выполняют усилителем 27. Команды на коммутацию преобразователя 4 от процессора 30 передаются в блок драйверов 18 по шине 36.
Контроль напряжения Ud в звене 5 выполняют БУИ 21 по информации с датчика напряжения 13. Аналитические выражения, описывающие значение напряжения Ud в звене постоянного тока 5 в зависимости от диапазона скорости движения электроподвижного состава, помещают для хранения в память процессора 30.
Таймер 34 выходного преобразователя 6 отрабатывает последовательность импульсов коммутации выходного преобразователя 6, который преобразует энергию звена постоянного тока в трехфазное регулируемое напряжение для питания двигателя 7. Управление преобразователем 7 выполняется БУИ 21. Контроль электрических параметров для регулирования двигателя 7 выполняют по сигналам, поступающим с датчиков напряжения 14 и 15 и датчиков фазного тока 16 и 17. Указанные сигналы преобразуют АЦП 31, обрабатывают усилителем 33, относящимся к УСО 24, и поступают в процессор 35 через шину 36.
В блоке 40 сравнивают значение скорости движения электроподвижного состава V, полученное с датчика скорости 8 с диапазоном скорости от VСР КВ до VН. Указанную операцию реализуют блоком управления инвертором 21. При нахождении скорости в указанном диапазоне величину напряжения звена постоянного тока задают равной  и подают команду на загрузку таймеров 29 и 34 привода (блок 44).
и подают команду на загрузку таймеров 29 и 34 привода (блок 44).
Аналогично в блоке 42 сравнивают значение скорости V, полученное с датчика скорости 8 на соответствие диапазону скорости от VН и выше, т.е. до максимальной скорости VMAX. Указанную операцию реализуют блоком управления инвертором 21. При нахождении скорости в указанном диапазоне величину напряжения звена постоянного тока задают равной  и подают команду на загрузку таймеров 29 и 34 привода (блок 44).
и подают команду на загрузку таймеров 29 и 34 привода (блок 44).
Далее опрос текущей скорости продолжают циклически в указанном порядке (блоки 38, 40, 42).
Контроль работоспособности блоков, входящих в состав БУИ 21, обеспечивают блоком диагностики 34.
Среднеквадратическое значение линейного напряжения тягового двигателя характеризует, в данном случае, наиболее вероятностное значение рабочего линейного напряжения, реализуемое в эксплуатации тягового привода переменного тока. Работа тягового привода с напряжением по электромеханической характеристике на участке UСР КВ-UН соответствует минимуму суммарных электрических потерь от совместной работы входного преобразователя переменного тока и выходного трехфазного инвертора, питающего асинхронный электродвигатель. Сказанное подтверждено экспериментальными данными. Таким образом, в предлагаемом способе управления в более значительном диапазоне работы, по сравнению с указанными аналогами, снижаются потери тягового привода в целом.
В предлагаемом способе управления зависимость напряжения звена постоянного тока от линейного напряжения (и частоты вращения) ТЭД в большинстве режимов работы наилучшим образом отражает оптимальную область работы электроподвижного состава с минимумом электрических потерь в приводе.
Согласно экспертной оценке повышение коэффициента полезного действия тягового электропривода за счет уменьшения потерь в элементах схемы заявляемого способа управления по сравнению с прототипом может быть увеличено в среднем на 1,5%.
Дополнительно примененная линеаризация позволяет уменьшить требования к ресурсам системы управления, за счет исключения многоэтапных вычислений на каждом шаге регулирования нагрузки.
Таким образом, совокупность известных и вновь введенных в предлагаемом способе действий над материальными объектами позволяет решить задачу, на которую направлено изобретение, обеспечив при этом получение требуемого технического результата. Способ технически реализуем и обладает новизной, что позволяет рассматривать его как изобретение.
Приведенное выше описание предпочтительных вариантов осуществления предусмотрено для того, чтобы дать возможность специалистам в данной области техники реализовать или использовать настоящее изобретение. Специалистам в данной области техники очевидны различные модификации этих вариантов, при этом определенные здесь общие принципы можно применить к другим вариантам без необходимости использования дополнительного изобретательства. Таким образом, настоящее изобретение не ограничивается показанными вариантами осуществления, а имеет самый широкий объем, соответствующий раскрытым принципам и новым признакам.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ПРИВОДНОЙ СИСТЕМОЙ БОЛЬШОЙ МОЩНОСТИ | 2000 |
|
RU2183570C1 |
| Система частотно-регулируемого асинхронного электропривода крано-манипуляторной установки (Система ЧРАП КМУ) | 2023 |
|
RU2820159C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД ЭЛЕКТРИЧЕСКОГО ТРАНСПОРТНОГО СРЕДСТВА И СПОСОБ УПРАВЛЕНИЯ ИМ | 2022 |
|
RU2798447C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД МНОГОСИСТЕМНОГО ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2004 |
|
RU2248892C1 |
| УСТРОЙСТВО ДЛЯ КОМПЕНСАЦИИ РЕАКТИВНОЙ МОЩНОСТИ ЭЛЕКТРОПОДВИЖНОГО СОСТАВА | 2011 |
|
RU2467893C1 |
| ЭЛЕКТРИЧЕСКАЯ ПЕРЕДАЧА МОЩНОСТИ ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА НА ПЕРЕМЕННОМ ТОКЕ | 2012 |
|
RU2509002C2 |
| АСИНХРОННЫЙ ТЯГОВЫЙ ПРИВОД ЭЛЕКТРОПОЕЗДА | 2004 |
|
RU2299512C2 |
| Устройство для управления частотнорегулируемым асинхронным электроприводом | 1976 |
|
SU752715A1 |
| РЕКУПЕРИРУЮЩИЙ ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА С ДВУХЗВЕННЫМ ПРЕОБРАЗОВАТЕЛЕМ ЧАСТОТЫ | 2014 |
|
RU2584002C1 |
| ТЯГОВЫЙ ЭЛЕКТРОПРИВОД АВТОНОМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2692288C1 |
Изобретение относится к силовой преобразовательной технике и может быть использовано в электроприводе переменного тока. Тяговый привод электроподвижного состава переменного тока содержит, по меньшей мере, один трехфазный электродвигатель, рассчитанный на постоянное потребление мощности свыше некоторой заданной частоты вращения и запитываемый от двухзвенного преобразователя переменного тока с изменяемым напряжением промежуточного звена постоянного тока. Питание на двухзвенный преобразователь переменного тока подают от сети электроснабжения. Напряжение промежуточного звена постоянного тока в диапазоне частот вращения ниже заданной частоты вращения снижают по сравнению с его максимальным значением таким образом, чтобы это напряжение промежуточного звена постоянного тока не снижалось ниже некоторого минимального значения, определяемого напряжением сети в процессе работы. В диапазоне частот вращения выше заданной частоты вращения исходя из указанного сниженного напряжения промежуточного звена постоянного тока происходит зависящий от частоты вращения переход к максимальному напряжению этого промежуточного звена при максимальной частоте вращения. При этом регулирование напряжения промежуточного звена постоянного тока выполняют исходя из напряжения нагрузки. Технический результат заключается в снижении требований к ресурсам системы управления тяговым приводом переменного тока за счет использования упрощенных и более четких критериев оптимальной работы. 3 ил.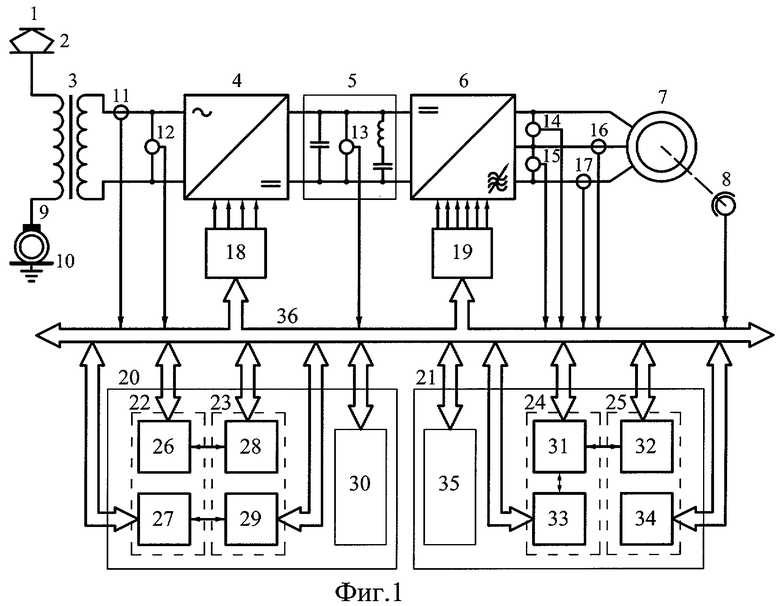
Способ управления тяговым приводом переменного тока, имеющим, по меньшей мере, один трехфазный электродвигатель, рассчитанный на постоянное потребление мощности свыше некоторой заданной частоты вращения и запитываемый от двухзвенного преобразователя переменного тока с изменяемым напряжением промежуточного звена постоянного тока, при этом питание на двухзвенный преобразователь переменного тока подают от сети электроснабжения и напряжение промежуточного звена постоянного тока в диапазоне частот вращения ниже заданной частоты вращения снижают по сравнению с его максимальным значением таким образом, чтобы это напряжение промежуточного звена постоянного тока не снижалось ниже некоторого минимального значения, определяемого напряжением сети в процессе работы, а в диапазоне частот вращения выше заданной частоты вращения исходя из указанного сниженного напряжения промежуточного звена постоянного тока происходит зависящий от частоты вращения переход к максимальному напряжению этого промежуточного звена при максимальной частоте вращения, отличающийся тем, что регулирование напряжения промежуточного звена постоянного тока выполняют исходя из напряжения нагрузки в соответствии с выражением
для диапазона скорости от 0 до VCPKB по формуле

для диапазона скорости от VCPKB до Vн по формуле

для диапазона скорости от VH и выше, по формуле
где 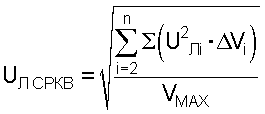 - среднеквадратическое значение линейного напряжения, определяемое по электромеханической характеристике асинхронного двигателя, представляющее собой зависимость линейного напряжения электродвигателя от скорости движения электроподвижного состава;
- среднеквадратическое значение линейного напряжения, определяемое по электромеханической характеристике асинхронного двигателя, представляющее собой зависимость линейного напряжения электродвигателя от скорости движения электроподвижного состава;
UЛi - линейное напряжение двигателя на i-ом интервале скорости ΔVi;
ΔVi=Vi-Vi-1 - шаг(интервал) выборки скорости;
Vi - текущее значение скорости на i-м интервале;
Vi-1 - значение скорости на предыдущем интервале;
VMAX - максимальная скорость движения;
n - целое число точек разбиения диапазона скорости на интервалы;
VCPKB - значение скорости соответствующее среднеквадратическому значению линейного напряжения двигателя;
VH - номинальная скорость тягового двигателя;
Ud - напряжение звена постоянного тока;
UЛН - номинальное значение линейного напряжения.
| СПОСОБ УПРАВЛЕНИЯ ПРИВОДНОЙ СИСТЕМОЙ БОЛЬШОЙ МОЩНОСТИ | 2000 |
|
RU2183570C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПОСТОЯННОГО НАПРЯЖЕНИЯ ВЫПРЯМИТЕЛЯ | 1998 |
|
RU2214674C2 |
| Устройство для регулирования скорости асинхронного электродвигателя | 1972 |
|
SU442561A1 |
| DE 4316365 A1, 01.12.1994. | |||

