Область техники, к которой относится изобретение
Настоящее изобретение относится к мотору, содержащему сердечник ротора, в который внедрены множественные постоянные магниты. В частности, настоящее изобретение относится к мотору, пригодному для варианта использования, в котором требуется устранение шума.
Уровень техники
Из вышесказанного следует, что мы будем рассматривать устранение шума мотора. Существует много технологий, которые призваны устранять шум в основном благодаря уделению внимания изменению силы притяжения в направлении вращения вследствие поворотного положения, например, синхронному моменту.
Например, в выложенных патентных заявках Японии №№ tokukaihei 10-201147, tokukaihei 11-98731 и tokukai 2000-69695 ставится целью снижение синхронного момента.
В выложенной патентной заявке Японии № tokukaihei 10-201147 раскрыт мотор с низкой вибрацией и низким шумом за счет снижения синхронного момента путем определения конечного положения в направлении по окружности постоянных магнитов в двух уровнях равным конкретному соотношению, которое удовлетворяет конкретной формуле, при этом постоянные магниты внедрены внутрь сердечника ротора, как показано на фиг.1.
В выложенной патентной заявке Японии № tokukaihei 10-201147 уделяется внимание синхронному моменту, так что формула отличается в зависимости от цикла синхронного момента. В частности, значение θ на фиг.1 увеличивается при использовании сосредоточенной обмотки, в результате чего усиливается недостаток, состоящий в том, что нельзя увеличить постоянные магниты, расположенные на внешней периферической стороне ротора.
Кроме того, угол апертуры магнитного полюса отличается для каждого полюса, в результате чего возникает дисбаланс в силе вращения. Также форма волны напряжения индукции приобретает асимметричную форму. Из-за этого увеличивается вероятность неправильной работы, например усиление шума, ухудшение точности определения положения и т.п. по другой причине.
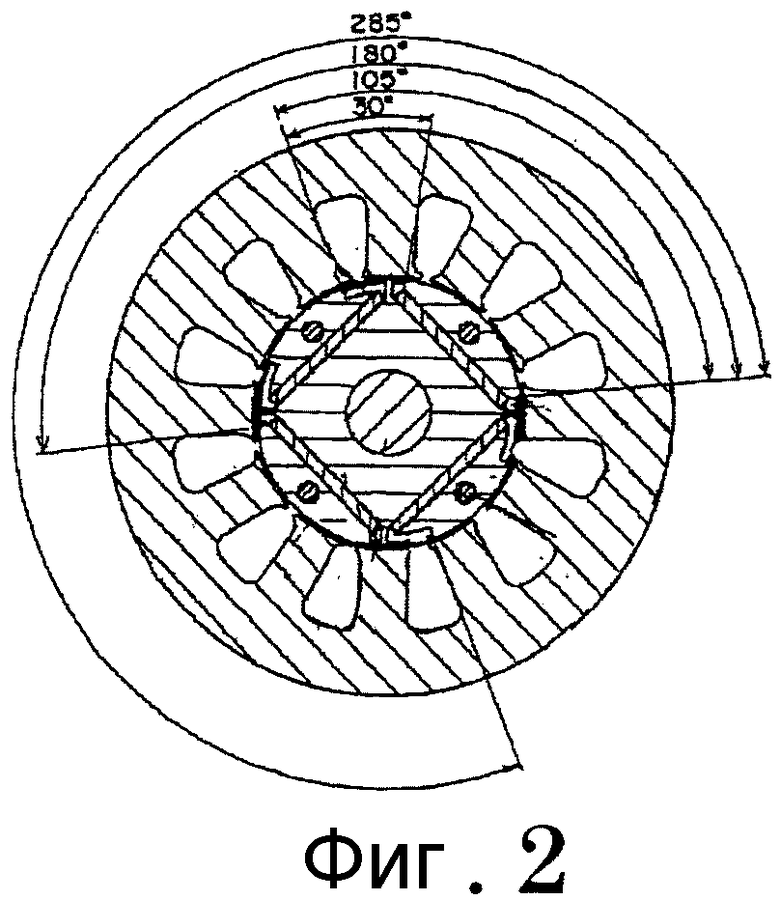
В выложенной патентной заявке Японии № tokukaihei 11-98731 поставлено целью снижение синхронного момента путем варьирования угла апертуры магнитного полюса для каждого полюса, как показано на фиг.2.
Однако угол апертуры магнитного полюса отличается для каждого полюса, вследствие чего возникает дисбаланс в силе вращения. Также форма волны напряжения индукции приобретает асимметричную форму. Из-за этого увеличивается вероятность неправильной работы, например усиление шума, ухудшение точности определения положения и т.п. по другой причине.
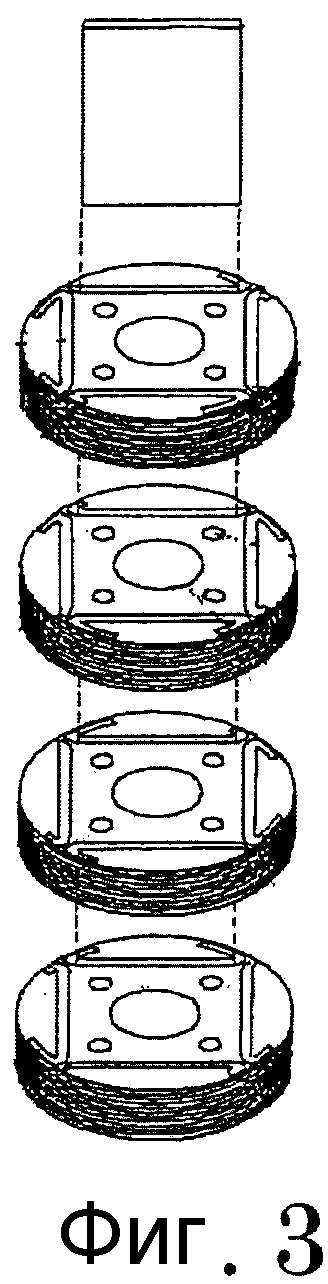
В выложенной патентной заявке Японии № tokukai 2000-69695 определены пробивные отверстия для внедрения постоянного магнита, которые равны друг другу, и изменения формы удлиненной секции отверстия, каждая из которых предназначена для контакта с краевой поверхностью постоянного магнита. Это соответствует применению псевдосдвига и призвано снижать синхронный момент. Пакетирование разных сердечников ротора в аксиальном направлении приводит к усложнению конфигурации пресс-формы. В аксиальном направлении генерируется сила, которая может вызывать осевую вибрацию. Нельзя игнорировать неправильную работу вследствие наличия полюса, который имеет чрезвычайно узкий угол апертуры в магнитном полюсе. Например, могут возникать проблемы, связанные с увеличением потерь в стали вследствие чрезмерной концентрации магнитного потока, из-за чего достаточный магнитный поток не может достичь краевой секции постоянного магнита в ходе намагничивания.
Все эти техники обращают внимание на синхронный момент. При работе мотора, в частности при высокой нагрузке, влияние синхронного момента мало, напротив, влияние высших гармоник напряжения индукции увеличивается, если синхронный момент падает ниже определенного значения. В частности, когда используется постоянный магнит, имеющий более высокую магнитную силу, например редкоземельный магнит, понятно, что магнит подвергается сильному влиянию высших гармоник напряжения индукции.
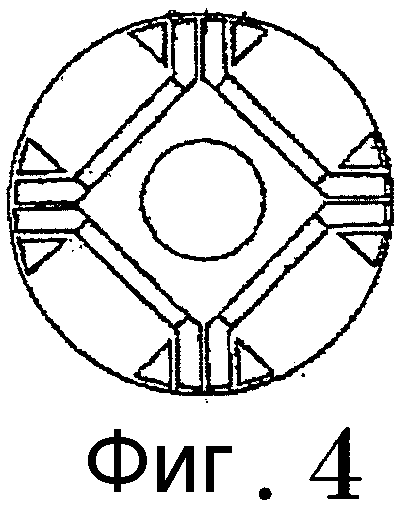
Выложенная патентная заявка Японии № tokukai 2002-44888 позволяет решить проблему наличия чрезвычайно узкого угла апертуры магнитного полюса среди вышеизложенных проблем. В частности, удлиненная секция отверстия, предусмотренная для контакта с краевой поверхностью постоянного магнита, разделена в периферическом направлении, как показано на фиг.4, что обеспечивает "вспомогательное ребро жесткости". Выложенная патентная заявка Японии № tokukai 2002-44888 ставит своей задачей предотвратить деформацию ротора.
Магнитный поток также течет через "вспомогательное ребро жесткости". Поэтому звук может усиливаться в зависимости от положения "вспомогательного ребра жесткости".
Согласно описанному выше выложенные патентные заявки Японии №№ tokukaihei 10-201147, tokukaihei 11-98731, tokukai 2000-69695 и tokukai 2002-44888 не позволяют успешно снижать синхронный момент при поддержании достаточного магнитного потока постоянного магнита и не позволяют не генерировать звук, обусловленный несбалансированной вибрацией, и звук, обусловленный осевой силой. Кроме того, они не предусматривают учет конкретных гармоник напряжения индукции, например гармоник пятого порядка или гармоник седьмого порядка. В особенности, они не предусматривают конфигурации для достаточного снижения звука, когда мотор имеет большую нагрузку.
Настоящее изобретение ставит перед собой цель решения вышеуказанных проблем.
Задачей настоящего изобретения является обеспечение мотора для снижения конкретных порядков формы волны распределения магнитного потока, например пятого порядка и седьмого порядка, и для предотвращения генерации ненужных радиальной силы и осевой силы при поддержании достаточного магнитного потока.
Сущность изобретения
Мотор согласно первому аспекту содержит сердечник ротора, несколько постоянных магнитов, внедренных в сердечник ротора, причем краевая секция периферийного направления каждого постоянного магнита или немагнитного слоя, продолжающая или примыкающая к краевой секции периферийного направления каждого постоянного магнита, проходит в окрестности между полюсами к окрестности поверхности ротора, и второй немагнитный слой обеспечен в окрестности поверхности ротора в боковой позиции центра полюса по отношению к краевой секции периферийного направления каждого постоянного магнита или немагнитного слоя, продолжающей или примыкающей к краевой секции периферийного направления каждого постоянного магнита, причем немагнитный слой, продолжающий или примыкающий к краевой секции периферийного направления каждого постоянного магнита, и второй немагнитный слой расположены так, чтобы подавлять гармоники n-го порядка (n - нечетное число и больше или равно 3) напряжения индукции.
Мотор согласно второму аспекту использует гармоники нечетного порядка, причем нечетное число больше или равно 3 и отлично от кратных 3, в качестве гармоник n-го порядка.
Мотор согласно третьему аспекту использует гармоники нечетного порядка, причем нечетное число больше или равно 13 и отлично от кратных 3, в качестве гармоник n-го порядка.
Мотор согласно четвертому аспекту использует гармоники 5-го порядка или гармоники 7-го порядка в качестве гармоник n-го порядка.
Мотор согласно пятому аспекту делает краевую секцию периферийного направления каждого постоянного магнита или немагнитного слоя, продолжающей или примыкающей к краевой секции периферийного направления каждого постоянного магнита, и второй немагнитный слой независимыми друг от друга и обеспечивает сердечник ротора, лежащий между ними.
Мотор согласно шестому аспекту определяет θ1 и θ2 как
0<θ1</(5·Pn)
и
180/(5·Pn)≤θ2≤×2/(5·Pn)
или
0<θ1< 180/(7·Pn)
и
180/(7·Pn)≤θ2≤×2/(7·Pn),
где θ1 представляет угол между краевой секцией периферийного направления каждого постоянного магнита или краевой секцией стороны центра полюса примыкающей секции поверхности ротора немагнитного слоя, продолжающей или примыкающей к краевой секции периферийного направления каждого постоянного магнита, и между полюсами, и θ2 представляет угол между краевой секцией стороны центра полюса примыкающей секции поверхности ротора второго немагнитного слоя и между полюсами, и Pn представляет количество пар полюсов.
Мотор согласно седьмому аспекту определяет угол θ1 как 0<θ1</(5·Pn) или 0<θ1<180/(7·Pn), угол θ2 как минимальное значение 180/(5·Pn)≤θ2 ≤×2/(5·Pn) или минимальное значение 180/(7·Pn) ≤θ2≤×2/(7·Pn).
Мотор согласно восьмому аспекту определяет θ5 и θ6 как
0<θ5</(5·Pn)
и
180/(5·Pn) ≤ θ6 ≤ 180×2/(5·Pn),
где θ5 представляет угол между краевой секцией периферийного направления каждого постоянного магнита или краевой секцией стороны центра полюса примыкающей секции поверхности ротора немагнитного слоя, продолжающей или примыкающей к краевой секции периферийного направления каждого постоянного магнита, и между полюсами, и θ6 представляет угол между краевой секцией стороны центра полюса примыкающей секции поверхности ротора второго немагнитного слоя и между полюсами, и Pn представляет количество пар полюсов
и определяет θ7 и θ8 как
0<θ7</(7·Pn)
и
180/(7·Pn)≤θ8≤×2/(7·Pn),
где ширина секции сердечника ротора имеет точки перегиба, причем ширина секции сердечника ротора прослоена краевой секцией периферийного направления каждого постоянного магнита или немагнитного слоя, продолжающей или примыкающей к краевой секции периферийного направления каждого постоянного магнита, второго немагнитного слоя и поверхности ротора, θ7 и θ8 представляют углы между соответствующей точкой перегиба и между полюсами, и Pn представляет количество пар полюсов
и определяет соотношение углов θ5, θ6, θ7 и θ8 как θ7 < θ5 < θ8 < θ6.
Мотор согласно девятому аспекту определяет угол θ5 как 0 < θ5 < 180/(5·Pn), угол θ7 как 0 < θ7 < 180/(7·Pn), угол θ6 как минимальное значение 180/(5·Pn) ≤ θ6 ≤ 180×2/(5·Pn) и угол θ8 как минимальное значение 180/(7·Pn) ≤ θ8 ≤ 180×2/(7·Pn).
Мотор согласно десятому аспекту использует постоянный магнит, разделенный на множественные слои в радиальном направлении, в качестве каждого из постоянных магнитов.
Мотор согласно одиннадцатому аспекту использует постоянный магнит, разделенный на два слоя в радиальном направлении, в качестве каждого из постоянных магнитов и определяет θ3 и θ4 как
0 < θ3 < 180/(5·Pn)
и
180/(5·Pn) ≤ θ4 ≤ 180×2/(5·Pn)
или
0 < θ3 < 180/(7·Pn)
и
180/(7·Pn) ≤ θ4 ≤ 180×2/(7·Pn),
где θ3 представляет угол между краевой секцией периферийного направления постоянного магнита на внутренней стороне ротора или краевой секцией стороны центра полюса примыкающей секции поверхности ротора немагнитного слоя, продолжающей или примыкающей к краевой секции периферийного направления каждого постоянного магнита, и между полюсами, и θ4 представляет угол между краевой секцией периферийного направления постоянного магнита на внешней стороне ротора или краевой секцией стороны центра полюса примыкающей секции поверхности ротора немагнитного слоя, продолжающей или примыкающей к краевой секции периферийного направления постоянного магнита, и между полюсами, и Pn представляет количество пар полюсов.
Мотор согласно двенадцатому аспекту определяет угол θ3 как 0 <θ3</(5·Pn) или 0<θ3</(7·Pn), угол θ4 как минимальное значение 180/(5·Pn)≤θ4≤×2/(5·Pn) или минимальное значение 180/(7·Pn)≤θ4≤×2/(7·Pn).
Мотор согласно тринадцатому аспекту использует постоянный магнит, разделенный на два слоя, в радиальном направлении в качестве каждого из постоянных магнитов и определяет θ9 и θ10 как
0<θ9</(5·Pn)
и
180/(5·Pn)≤θ10≤×2/(5·Pn),
где θ9 представляет угол между краевой секцией стороны центра полюса примыкающей секции поверхности ротора постоянного магнита на внутренней стороне ротора и между полюсами, и θ10 представляет угол между краевой секцией стороны центра полюса примыкающей секции поверхности ротора постоянного магнита на внешней стороне ротора и между полюсами, и Pn представляет количество пар полюсов
и определяет θ11 и θ12 как
0 < θ11 < 180/(7·Pn)
и
180/(7·Pn) ≤ θ12 ≤ 180×2/(7·Pn),
где ширина секции сердечника ротора имеет точки перегиба, причем ширина секции сердечника ротора прослоена краевой секцией периферийного направления постоянного магнита на внутренней стороне ротора или немагнитного слоя, продолжающей или примыкающей к краевой секции периферийного направления постоянного магнита и краевой секции периферийного направления постоянного магнита на внешней стороне ротора или немагнитного слоя, продолжающего или примыкающего к краевой секции периферийного направления постоянного магнита, θ11 и θ12 представляют углы между соответствующей точкой перегиба и между полюсами, и Pn представляет количество пар полюсов
и определяет соотношение углов θ9, θ10, θ11 и θ12 как θ11 < θ9 < θ12 < θ10.
Мотор согласно четырнадцатому аспекту определяет угол θ9 как 0 < θ9 < 180/(5·Pn), угол θ11 как 0 < θ11 < 180/(7·Pn), угол θ10 как минимальное значение 180/(5·Pn) ≤ θ10 ≤ 180×2/(5·Pn) и угол θ12 как минимальное значение 180/(7·Pn) ≤ θ12 ≤ 180×2/(7·Pn).
В этом описании изобретения термин "полюс" используется для представления N-полюсов или S-полюсов, которые располагаются через каждый приблизительно постоянный интервал или постоянный угол, "магнитный полюс" используется для представления пространства, из которого в основном течет магнитный поток постоянного магнита.
Изобретение согласно первому аспекту содержит сердечник ротора, несколько постоянных магнитов, внедренных в сердечник ротора, причем краевая секция периферийного направления каждого постоянного магнита или немагнитного слоя, продолжающая или примыкающая к краевой секции периферийного направления каждого постоянного магнита, проходит в окрестности между полюсами к окрестности поверхности ротора, и второй немагнитный слой обеспечен в окрестности поверхности ротора в боковой позиции центра полюса по отношению к краевой секции периферийного направления каждого постоянного магнита или немагнитного слоя, продолжающей или примыкающей к краевой секции периферийного направления каждого постоянного магнита, причем немагнитный слой, продолжающий или примыкающий к краевой секции периферийного направления каждого постоянного магнита, и второй немагнитный слой расположены так, чтобы подавлять гармоники n-го порядка (n - нечетное число и больше или равно 3) напряжения индукции. Поэтому можно ослаблять компонент гармоник n-го порядка формы волны распределения магнитного потока (формы волны напряжения индукции) и можно предотвращать возникновение ненужных радиальной силы и осевой силы, в то же время можно поддерживать достаточный магнитный поток.
Мотор согласно второму аспекту использует гармоники порядка, который является нечетным числом, которое больше или равно 3 и отличается от кратных 3, в качестве гармоник n-го порядка. Поэтому гармоники нечетного порядка, причем нечетное число больше или равно 3 и отлично от кратных 3, формы волны распределения магнитного потока (формы волны напряжения индукции) можно ослаблять и можно предотвращать возникновение ненужных радиальной силы и осевой силы, в то же время можно поддерживать достаточный магнитный поток.
Мотор согласно третьему аспекту использует гармоники порядка, который является нечетным числом, которое больше или равно 13 и отличается от кратных 3, в качестве гармоник n-го порядка. Поэтому гармоники нечетного порядка, причем нечетное число больше или равно 13 и отлично от кратных 3, формы волны распределения магнитного потока (формы волны напряжения индукции) можно ослаблять и можно предотвращать возникновение ненужных радиальной силы и осевой силы, в то же время можно поддерживать достаточный магнитный поток.
Мотор согласно четвертому аспекту использует гармоники пятого порядка или гармоники седьмого порядка в качестве гармоник n-го порядка. Поэтому можно ослаблять гармоники 5-го порядка или гармоники 7-го порядка формы волны распределения магнитного потока (формы волны напряжения индукции) и можно предотвращать возникновение ненужных радиальной силы и осевой силы, в то же время можно поддерживать достаточный магнитный поток.
Мотор согласно пятому аспекту делает краевую секцию периферийного направления каждого постоянного магнита или немагнитного слоя, продолжающего или примыкающего к краевой секции периферийного направления каждого постоянного магнита, и второй немагнитный слой независимыми друг от друга и обеспечивает сердечник ротора, лежащий между ними. Поэтому можно усилить механическую прочность и можно реализовать операцию и эффект, аналогичные отвечающим четвертому аспекту.
Мотор согласно шестому аспекту определяет θ1 и θ2 как
0 < θ1 < 180/(5·Pn)
и
180/(5·Pn) ≤ θ2 ≤ 180×2/(5·Pn)
или
0 < θ1 < 180/(7·Pn)
и
180/(7·Pn) ≤ θ2 ≤ 180×2/(7·Pn),
где θ1 представляет угол между краевой секцией периферийного направления каждого постоянного магнита или краевой секцией стороны центра полюса примыкающей секции поверхности ротора немагнитного слоя, продолжающей или примыкающей к краевой секции периферийного направления каждого постоянного магнита, и между полюсами, и θ2 представляет угол между краевой секцией стороны центра полюса примыкающей секции поверхности ротора второго немагнитного слоя и между полюсами, и Pn представляет количество пар полюсов. Поэтому операцию и эффект, аналогичные отвечающим четвертому аспекту или пятому аспекту, можно реализовать с учетом симметрии.
Мотор согласно седьмому аспекту определяет угол θ1 как 0 < θ1 < 180/(5·Pn) или 0<θ1</(7·Pn), угол θ2 как минимальное значение 180/(5·Pn)≤θ2≤×2/(5·Pn) или минимальное значение 180/(7·Pn)≤θ2≤180×2/(7·Pn). Поэтому можно реализовать устранение шума и можно реализовать операцию и эффект, аналогичные отвечающим четвертому аспекту или пятому аспекту.
Мотор согласно восьмому аспекту определяет θ5 и θ6 как
0 < θ5 < 180/(5·Pn)
и
180/(5·Pn) ≤ θ6 ≤ 180×2/(5·Pn),
где θ5 представляет угол между краевой секцией периферийного направления каждого постоянного магнита или краевой секцией стороны центра полюса примыкающей секции поверхности ротора немагнитного слоя, продолжающей или примыкающей к краевой секции периферийного направления каждого постоянного магнита, и между полюсами, и θ6 представляет угол между краевой секцией стороны центра полюса примыкающей секции поверхности ротора второго немагнитного слоя и между полюсами, и Pn представляет количество пар полюсов
и определяет θ7 и θ8 как
0 < θ7 < 180/(7·Pn)
и
180/(7·Pn) ≤ θ8 ≤ 180×2/(7·Pn),
где ширина секции сердечника ротора имеет точки перегиба, причем ширина секции сердечника ротора прослоена краевой секцией периферийного направления каждого постоянного магнита или немагнитного слоя, продолжающей или примыкающей к краевой секции периферийного направления каждого постоянного магнита, второго немагнитного слоя и поверхности ротора, θ7 и θ8 представляют углы между соответствующей точкой перегиба и между полюсами, и Pn представляет количество пар полюсов
и определяет соотношение углов θ5, θ6, θ7 и θ8 как θ7 < θ5 < θ8 < θ6. Поэтому операцию и эффект, аналогичные отвечающим четвертому аспекту или пятому аспекту, можно реализовать с учетом симметрии.
Мотор согласно девятому аспекту определяет угол θ5 как 0 < θ5 < 180/(5·Pn), угол θ7 как 0<θ7</(7·Pn), угол θ6 как минимальное значение 180/(5·Pn) ≤ 06 ≤ 180×2/(5·Pn) и угол θ8 как минимальное значение 180/(7·Pn) ≤ θ8 ≤ 180×2/(7·Pn). Поэтому можно реализовать устранение шума и можно реализовать операцию и эффект, аналогичные отвечающим четвертому аспекту или пятому аспекту.
Мотор согласно десятому аспекту использует постоянный магнит, разделенный на множественные слои в радиальном направлении, в качестве каждого из постоянных магнитов. Поэтому операция и эффект, аналогичные отвечающим аспектам с первого по четвертый, можно реализовать даже, когда постоянный магнит разделен на множественные части, причем некоторые части соответствуют внутренней стороне ротора и другие части соответствуют внешней стороне ротора.
Мотор согласно одиннадцатому аспекту использует постоянный магнит, разделенный на два слоя в радиальном направлении, в качестве каждого из постоянных магнитов и определяет θ3 и θ4 как
0 < θ3 < 180/(5·Pn)
и
180/(5·Pn) ≤ θ4 ≤ 180×2/(5·Pn)
или
0 < θ3 < 180/(7·Pn)
и
180/(7·Pn) ≤ θ4 ≤ 180×2/(7·Pn),
где θ3 представляет угол между краевой секцией периферийного направления постоянного магнита на внутренней стороне ротора или краевой секцией стороны центра полюса примыкающей секции поверхности ротора немагнитного слоя, продолжающей или примыкающей к краевой секции периферийного направления каждого постоянного магнита, и между полюсами, и θ4 представляет угол между краевой секцией стороны центра полюса примыкающей секции поверхности ротора краевой секции периферийного направления постоянного магнита на внешней стороне ротора или немагнитного слоя, продолжающей или примыкающей к краевой секции периферийного направления постоянного магнита, и между полюсами, и Pn представляет количество пар полюсов.
Мотор согласно двенадцатому аспекту определяет угол θ3 как 0 < θ3< 180/(5·Pn) или 0 < θ3 < 180/(7·Pn), угол θ4 как минимальное значение 180/(5·Pn) ≤ θ4 ≤ 180×2/(5·Pn) или минимальное значение 180/(7·Pn)≤θ4≤×2/(5·Pn). Поэтому можно реализовать устранение шума и можно реализовать операцию и эффект, аналогичные отвечающим десятому аспекту.
Мотор согласно тринадцатому аспекту использует постоянный магнит, разделенный на два слоя в радиальном направлении, в качестве каждого из постоянных магнитов и определяет θ9 и θ10 как
0 < θ9 < 180/(5·Pn)
и
180/(5·Pn) ≤ θ10 ≤ 180×2/(5·Pn),
где θ9 представляет угол между краевой секцией стороны центра полюса примыкающей секции поверхности ротора постоянного магнита на внутренней стороне ротора и между полюсами, и θ10 представляет угол между краевой секцией стороны центра полюса примыкающей секции поверхности ротора постоянного магнита на внешней стороне ротора и между полюсами, и Pn представляет количество пар полюсов и определяет θ11 и θ12 как
0 < θ11 < 180/(7·Pn)
и
180/(7·Pn) ≤ θ12 ≤ 180×2/(7·Pn),
где ширина секции сердечника ротора имеет точки перегиба, причем ширина секции сердечника ротора прослоена краевой секцией периферийного направления постоянного магнита на внутренней стороне ротора или немагнитного слоя, продолжающей или примыкающей к краевой секции периферийного направления постоянного магнита и краевой секции периферийного направления постоянного магнита на внешней стороне ротора или немагнитного слоя, продолжающей или примыкающей к краевой секции периферийного направления постоянного магнита, θ11 и θ12 представляют углы между соответствующей точкой перегиба и между полюсами, и Pn представляет количество пар полюсов
и определяет соотношение углов θ9, θ10, θ11 и θ12 как θ11 < θ9 < θ12 < θ10. Поэтому операцию и эффект, аналогичные отвечающим десятому аспекту, можно реализовать с учетом симметрии.
Мотор согласно четырнадцатому аспекту определяет угол θ9 как 0 < θ9 < 180/(5·Pn), угол θ11 как 0 < θ11 < 180/(7·Pn), угол θ10 как минимальное значение 180/(5·Pn) ≤ θ10 ≤ 180×2/(5·Pn) и угол θ12 как минимальное значение 180/(7·Pn) ≤ θ12 ≤ 180×2/(7·Pn). Поэтому можно реализовать устранение шума и можно реализовать операцию и эффект, аналогичные отвечающим десятому аспекту.
Краткое описание чертежей
Фиг.1 - схема, иллюстрирующая пример мотора согласно уровню техники.
Фиг.2 - схема, иллюстрирующая другой пример мотора согласно уровню техники.
Фиг.3 - схема, иллюстрирующая еще один пример мотора согласно уровню техники.
Фиг.4 - схема, иллюстрирующая еще один пример мотора согласно уровню техники.
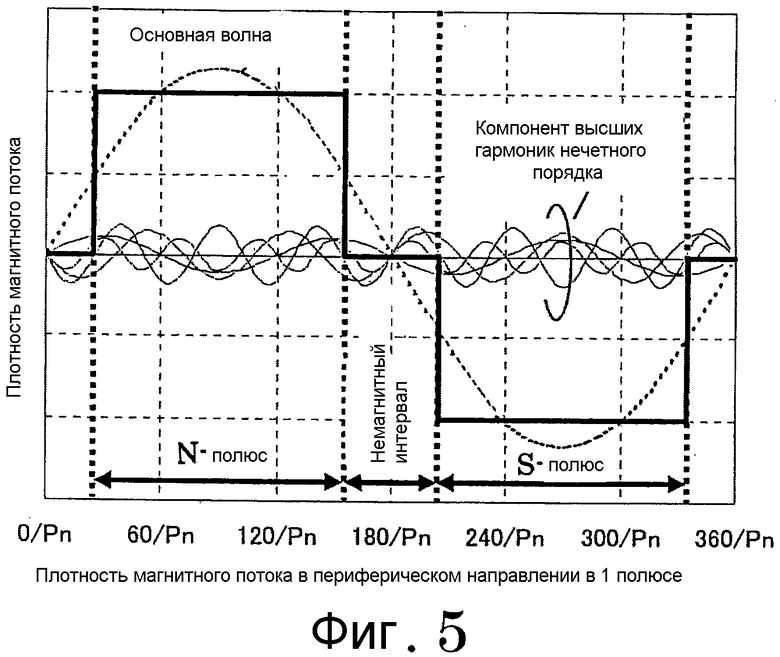
Фиг.5 - диаграмма, иллюстрирующая распределение плотности магнитного потока в периферическом направлении на поверхности ротора.
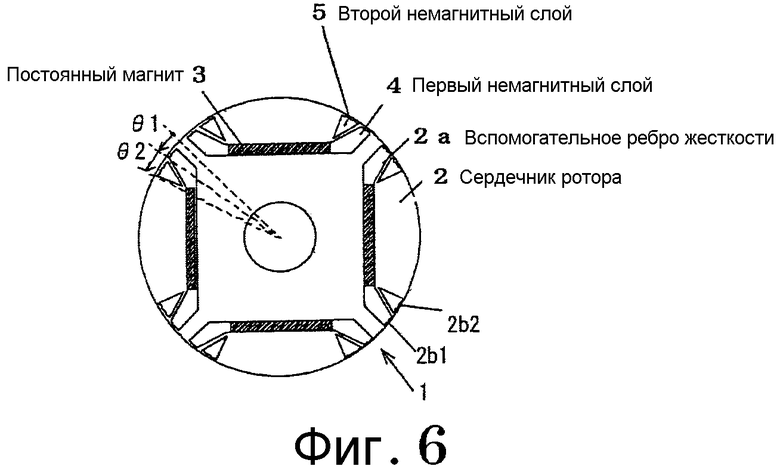
Фиг.6 - вид в разрезе, иллюстрирующий ротор мотора согласно первому варианту осуществления настоящего изобретения.
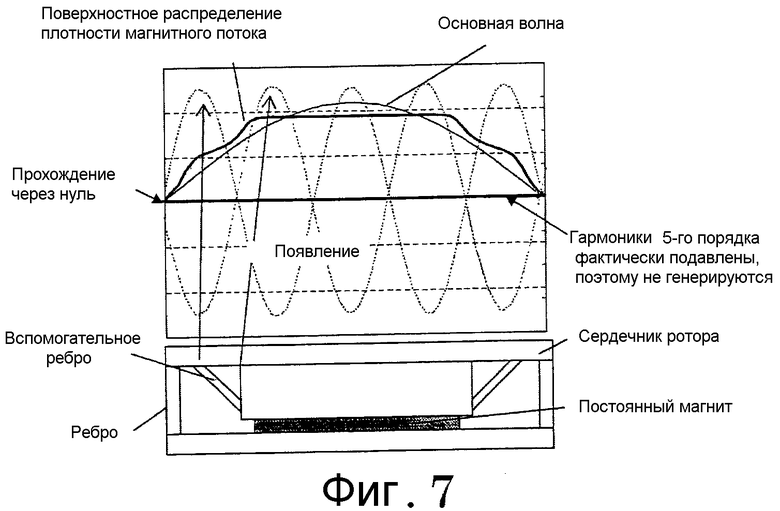
Фиг.7 - диаграмма, иллюстрирующая соотношение между распределением плотности магнитного потока на поверхности ротора и немагнитного слоя.
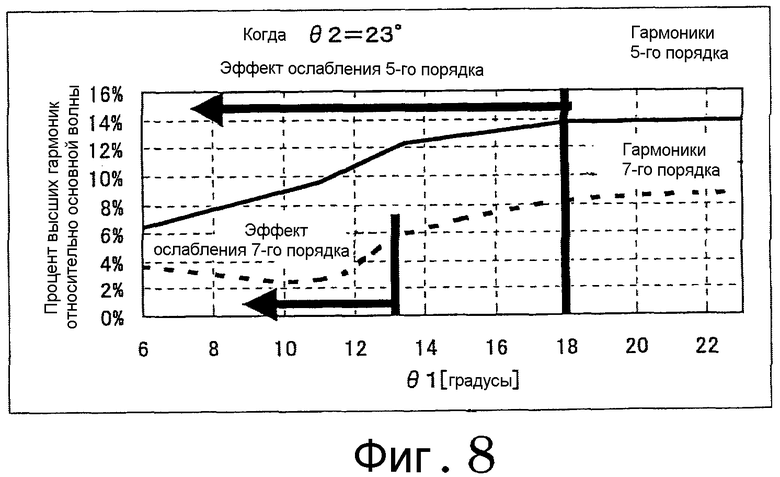
Фиг.8 - диаграмма, иллюстрирующая характеристики гармоник 5-го порядка, гармоник 7-го порядка относительно θ1, когда θ2=23°.
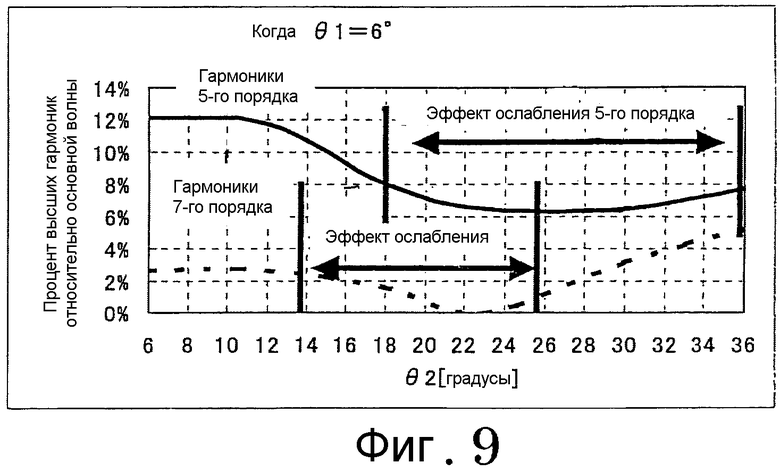
Фиг.9 - диаграмма, иллюстрирующая характеристики гармоник 5-го порядка, гармоник 7-го порядка относительно θ2, когда θ1=6°.
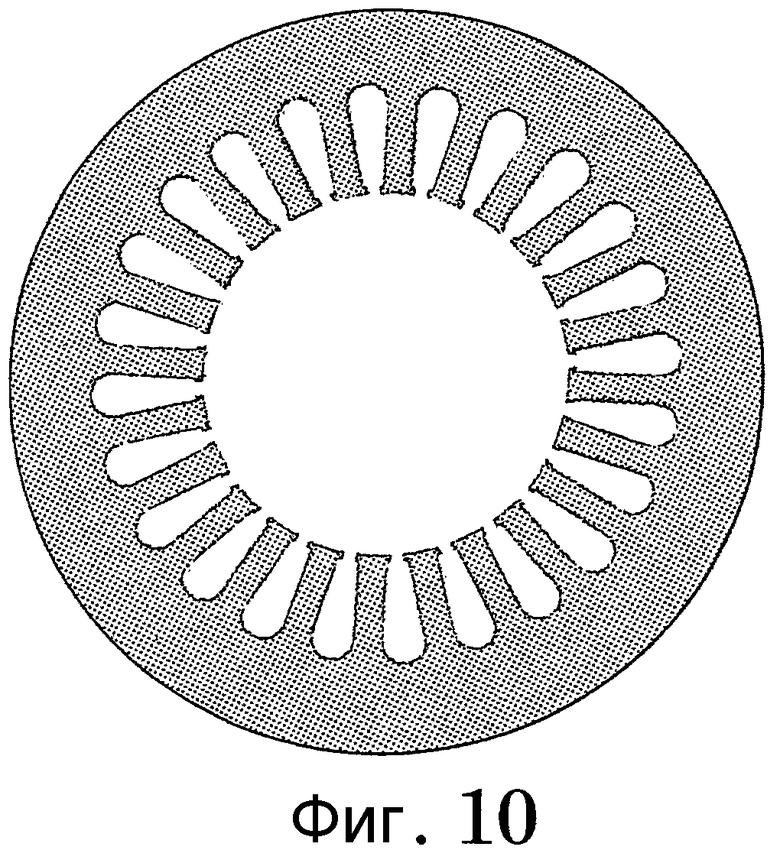
Фиг.10 - схема, иллюстрирующая статор, имеющий распределенную обмотку.
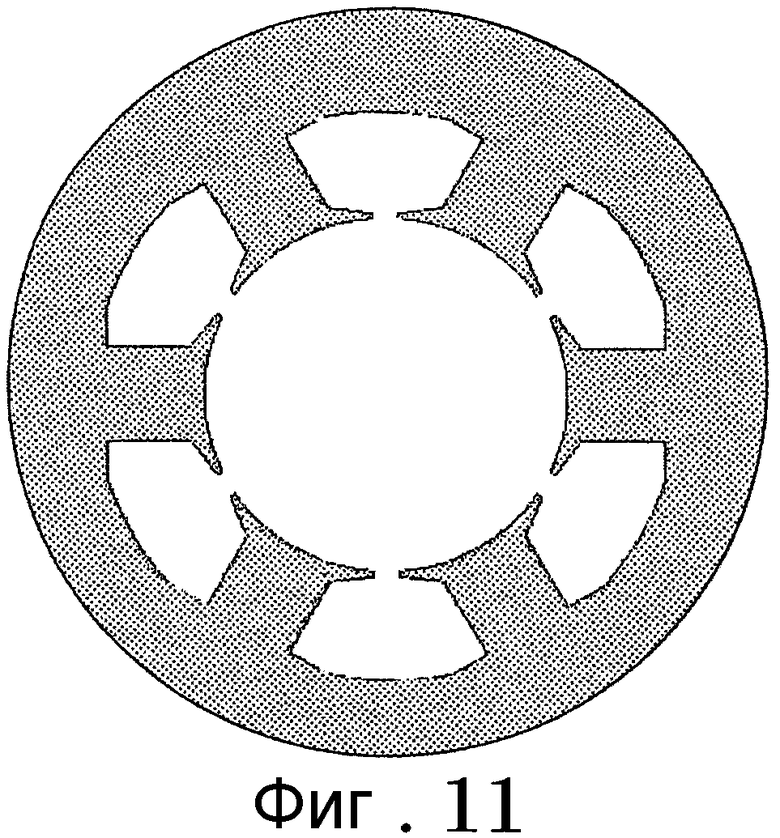
Фиг.11 - схема, иллюстрирующая статор, имеющий сосредоточенную обмотку.
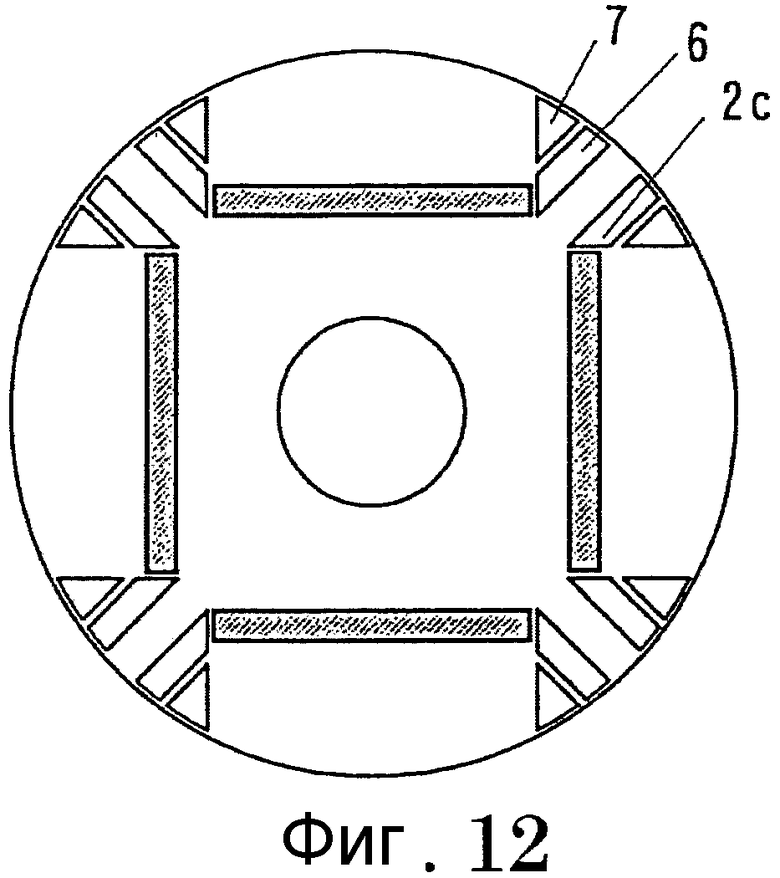
Фиг.12 - схема, иллюстрирующая модифицированный пример ротора согласно первому варианту осуществления.
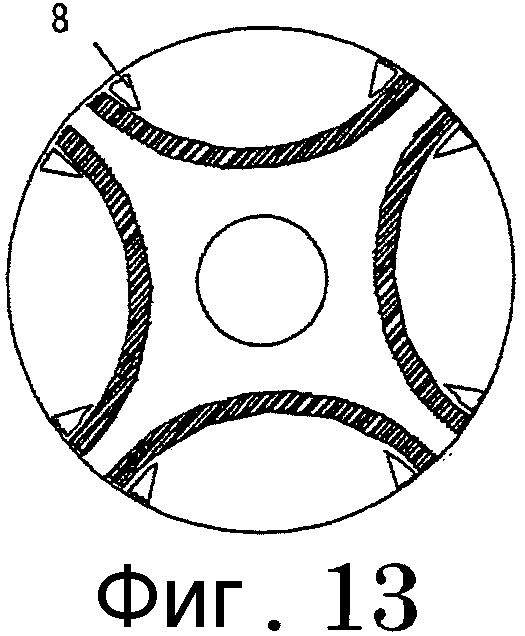
Фиг.13 - схема, иллюстрирующая другой модифицированный пример ротора согласно первому варианту осуществления.
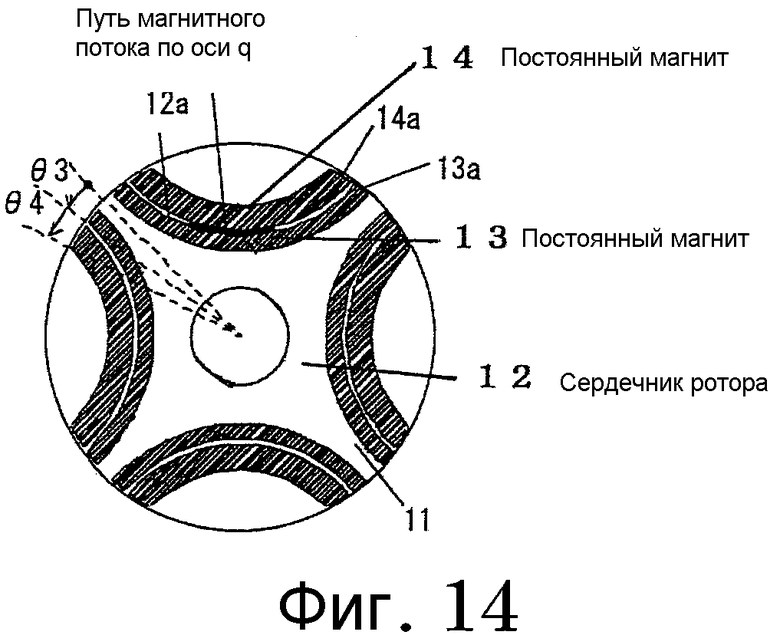
Фиг.14 - схема, иллюстрирующая ротор мотора согласно второму варианту осуществления настоящего изобретения.
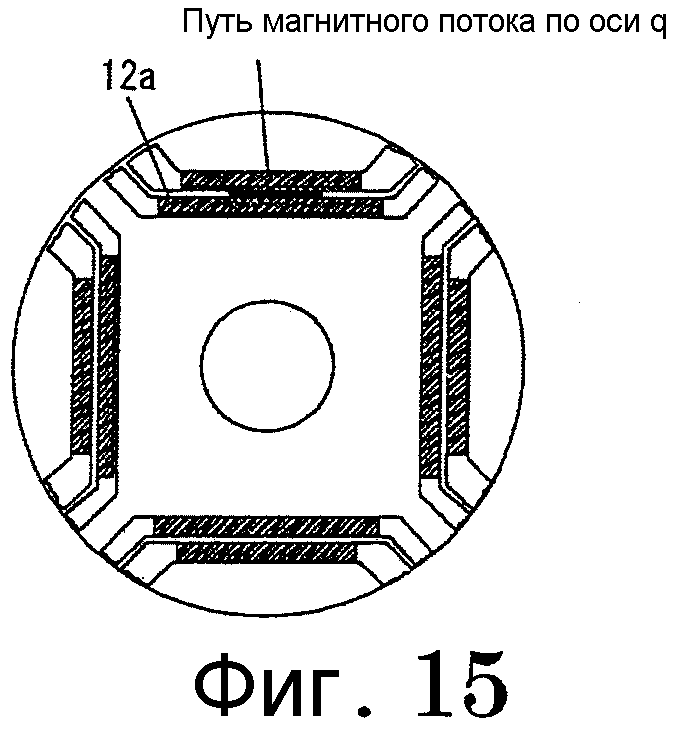
Фиг.15 - схема, иллюстрирующая модифицированный пример ротора согласно второму варианту осуществления.
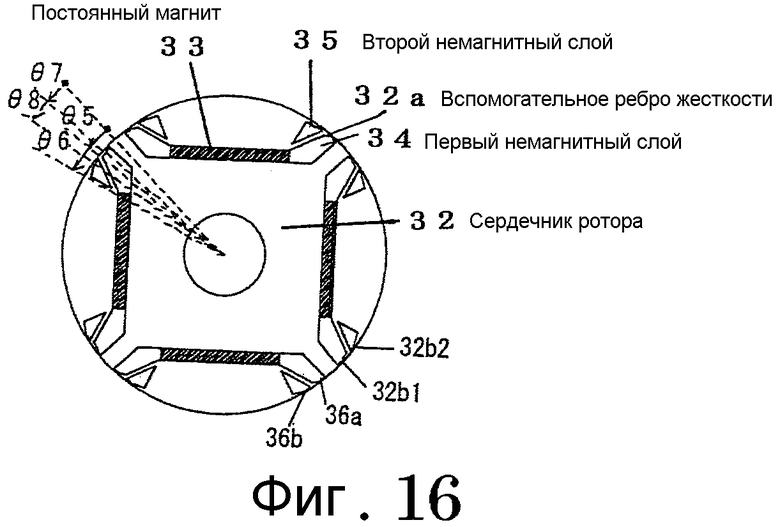
Фиг.16 - схема, иллюстрирующая ротор мотора согласно третьему варианту осуществления настоящего изобретения.
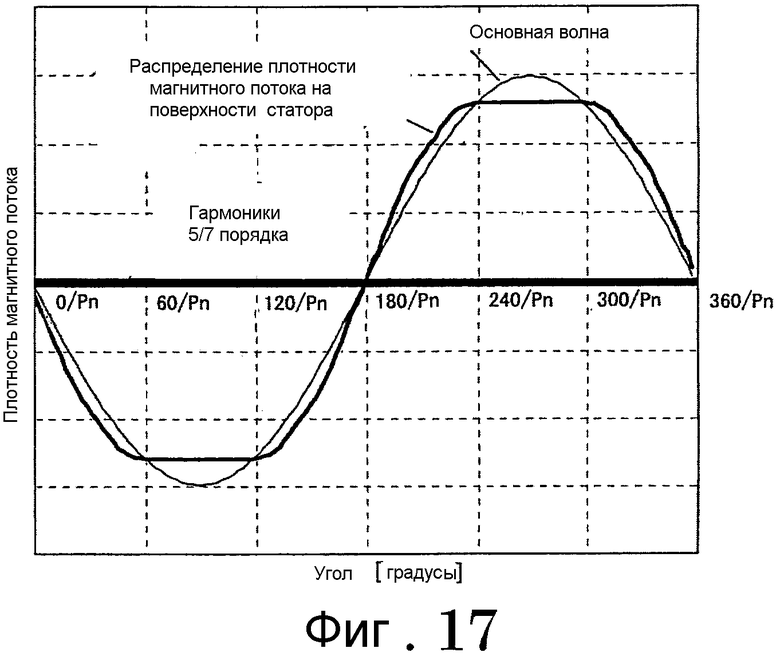
Фиг.17 - диаграмма, иллюстрирующая распределение плотности магнитного потока на поверхности ротора.
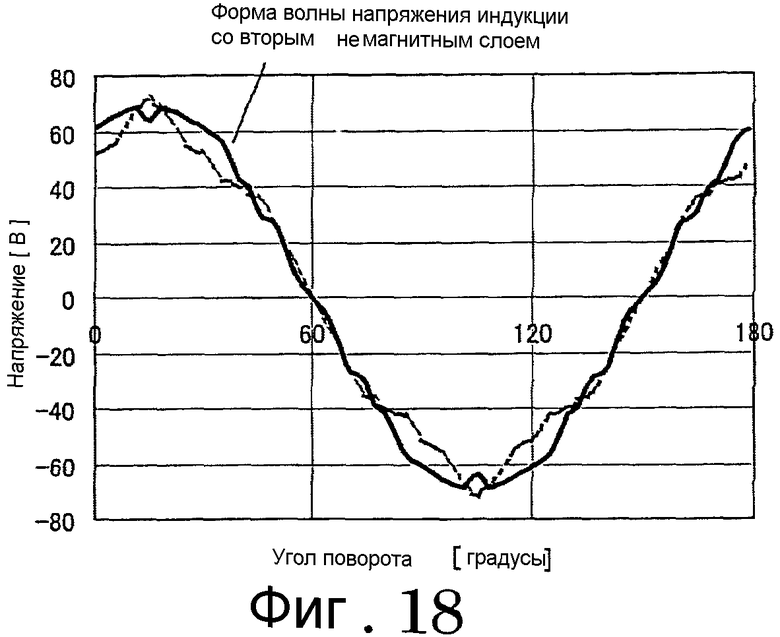
Фиг.18 - диаграмма, иллюстрирующая сравнение формы волны напряжения индукции для случая, когда второй немагнитный слой отсутствует, и формы волны напряжения индукции для случая, когда используется третий вариант осуществления.
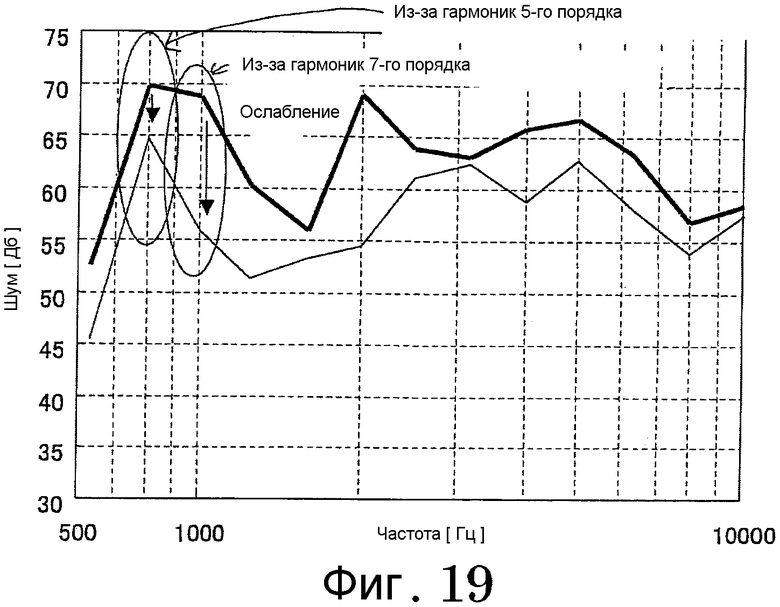
Фиг.19 - диаграмма, иллюстрирующая компонент высших гармоник шума для случая, когда мотор работает как мотор компрессора.
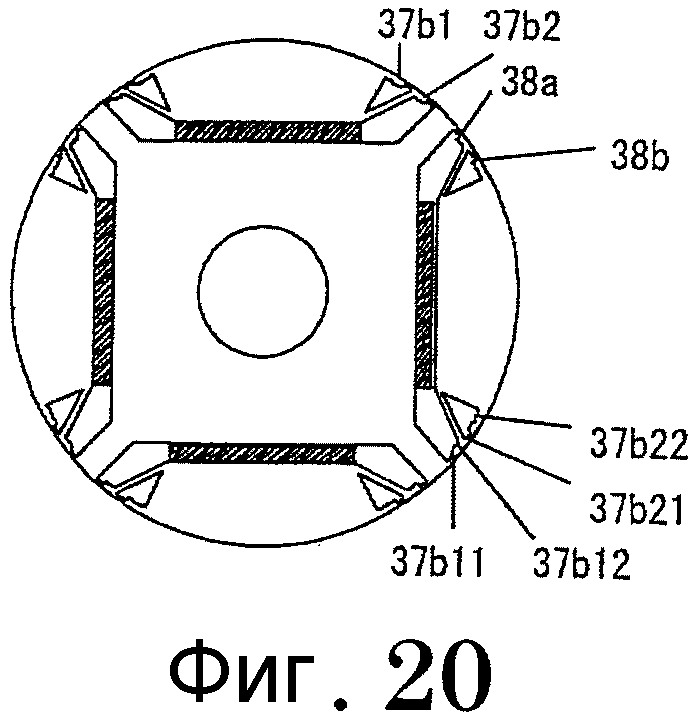
Фиг.20 - схема, иллюстрирующая модифицированный пример ротора согласно третьему варианту осуществления.
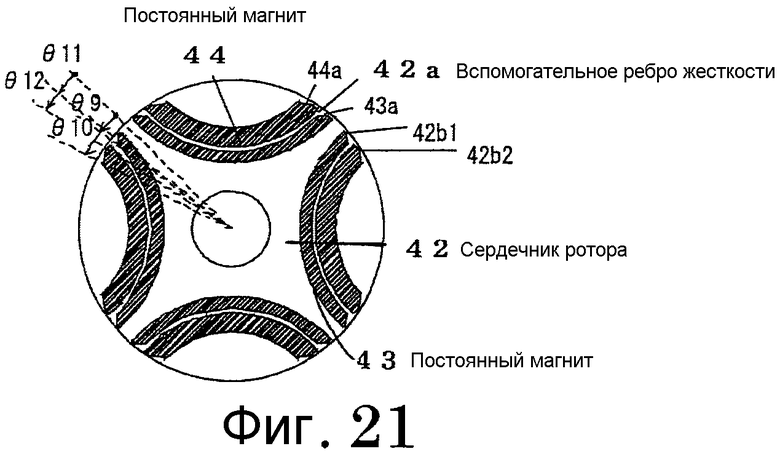
Фиг.21 - схема, иллюстрирующая ротор мотора согласно четвертому варианту осуществления настоящего изобретения.
Предпочтительные варианты осуществления изобретения
Ниже приведено подробное объяснение мотора согласно варианту осуществления настоящего изобретения.
В нижеследующем варианте осуществления мы рассмотрим случай подавления гармоник 5-го порядка и/или гармоник 7-го порядка напряжения индукции. Однако, конечно, возможно подавление других гармоник. Прежде всего, опишем общий пример мотора.
Распределение плотности магнитного потока в периферическом направлении поверхности ротора мотора симметрично для каждого полюса. Когда все полюсы имеют приблизительно одинаковую форму, плотность магнитного потока между полюсами становится нулевой.
Поэтому распределение плотности магнитного потока в периферическом направлении поверхности ротора мотора является распределением, которое делает 1 пару полюсов основной волной и включает в себя ее нечетные гармоники. Например, при разложение в ряд Фурье простой прямоугольной волны компоненты нечетного порядка, например третьего порядка, 5-го порядка, 7-го порядка и 9-го порядка, накладываются на основную волну, как показано на фиг.5. При этом силы добавления вибрации гармоник 3n-го порядка (где n - 1, 2, 3, 4,..), например силы добавления вибрации гармоник третьего порядка и 9-го порядка, находятся в синхронизме друг с другом, поэтому мода резонанса имеет номер, равный числу полюсов статора, например шестиугольная мода резонанса для статора, имеющего 6 полюсов. Мода резонанса более высокого порядка обычно сильно выходит за пределы слышимого диапазона, поэтому мода резонанса вряд ли станет шумом.
Кроме того, 5-й порядок и 7-й порядок имеют характеристики, которые больше по амплитуде, легче становятся звуком и труднее вырезаются вследствие низкой частоты по сравнению с одиннадцатым и более высокими порядками. Поэтому мы сосредоточимся на гармониках 5-го порядка и гармониках 7-го порядка.
При рассмотрении гармоник 5-го порядка и гармоник 7-го порядка можно исходить из двух постулатов:
1) компонент каждого порядка обнуляется вследствие симметрии формы волны плотности магнитного потока на поверхности ротора;
2) компонент гармоник высших порядков проходит через нуль в месте, где изменение магнитного потока начинается внезапно, например начинается магнитный полюс и т.п.
Первый вариант осуществления
Перейдем к описанию первого варианта осуществления со ссылкой на чертежи.
На фиг.6 показана схема, иллюстрирующая конфигурацию ротора мотора согласно первому варианту осуществления настоящего изобретения.
Этот ротор 1 содержит множественные постоянные магниты 3 (в этом варианте осуществления ротор имеет 4 полюса, следовательно, 4 постоянных магнита 3), которые внедрены внутрь сердечника 2 ротора.
Кроме того, немагнитные слои 4 (ниже именуемые "первый немагнитный слой"), каждый из которых продолжается до краевой секции периферийного направления каждого постоянного магнита 3, каждый проходит в окрестности между полюсами к окрестности поверхности ротора. Второй немагнитный слой 5 обеспечен в месте, которое является боковым местом центра полюса первого немагнитного слоя 4 и которое находится в окрестности поверхности ротора. При этом немагнитный слой является сквозным отверстием или воздушным слоем. Первый немагнитный слой 4 и второй немагнитный слой 5 независимы друг от друга. Вспомогательное ребро жесткости 2a, образованное сердечником ротора, размещено между обоими немагнитными слоями.
Угол θ1 между краевой секцией стороны центра полюса примыкающей секции поверхности ротора и между полюсами первого немагнитного слоя 4 и угол θ2 между краевой секцией стороны центра полюса примыкающей секции поверхности ротора и между полюсами второго немагнитного слоя 5 определены как
0 < θ1 < 180/(5·Pn)
и
180/(5·Pn) ≤ θ2 ≤ 180×2/(5·Pn)
или
0 < θ1 < 180/(7·Pn)
и
180/(7·Pn) ≤ θ2 ≤ 180×2/(7·Pn),
где количество пар полюсов равно Pn. Вышеприведенные формулы соответствуют ослаблению гармоник 5-го порядка и ослаблению гармоник 7-го порядка. При осуществлении ослабления гармоник n-го порядка (n - нечетное число, большее или равное 3) вместо 5-го и 7-го используется n. Подобная операция должна осуществляться для нижеследующих формул.
В этом варианте осуществления количество пар полюсов Pn=2. Формулы двух верхних строк используются для ослабления гармоник 5-го порядка. В частности, лучше, когда θ1=9°, θ2=18°.
Принцип ослабления звука мотора, имеющего вышеописанную конфигурацию, описан ниже.
Например, поскольку гармоники 5-го порядка подлежат ослаблению и количество пар полюсов равно 2, когда θ1=0° и θ2=18°, фазы сдвигаются на 180°, чтобы подавлять друг друга. Однако θ1=0° трудно осуществить для конфигурации, в которой постоянные магниты внедрены внутрь сердечника ротора. Поэтому вследствие симметрии трудно осуществить θ1 < 18°. Когда подлежат ослаблению гармоники 7-го порядка, используются формулы двух нижних строк, и лучше, когда θ1 < 12,9°, 12,9° ≤ θ2 ≤ 25,7°. Для максимизации момента θ2 увеличивают насколько возможно, чтобы увеличить магнитный поток, взаимосвязанный с постоянным магнитом.
На фиг.7 показано соотношение между распределением плотности магнитного потока на поверхности ротора и немагнитных слоев 4 и 5 согласно этому варианту осуществления. На некотором участке немагнитных слоев 4 и 5 плотность магнитного потока увеличивается или уменьшается, а на остальном участке немагнитных слоев 4 и 5 плотность магнитного потока приблизительно постоянна. Поэтому изменение магнитного потока становится резким от краевой секции стороны центра полюса примыкающей части поверхности ротора соответствующих немагнитных слоев 4 и 5. В результате для соответствующих точек появляются точки прохождения через нуль компонентов высших гармоник. Для второго немагнитного слоя 5 это соответствует 1 длине волны гармоники 5/7 порядка между полюсами и считается, что точка прохождения через нуль оказывается между полюсами вследствие симметрии. Для первого немагнитного слоя 4 это соответствует половине длины волны гармоники 5/7 порядка между полюсами и считается, что точка прохождения через нуль оказывается между полюсами вследствие симметрии. Поэтому гармоники 5/7 порядка вследствие соответствующих немагнитных слоев 4 и 5 сдвинуты на половину длины волны относительно друг друга, в результате чего гасят друг друга.
На фиг.8 показаны характеристики гармоник 5-го порядка и гармоник 7-го порядка относительно θ1, когда θ2=23°, а на фиг.9 показаны характеристики гармоник 5-го порядка и гармоник 7-го порядка относительно θ2, когда θ1=6°.
Из фиг.8 и 9 следует, что более сильный эффект ослабления гармоник 5-го порядка и гармоник 7-го порядка можно реализовать, определяя углы θ1 и θ2 так, чтобы они удовлетворяли вышеприведенным формулам.
При этом ширина сердечника ротора, прослоенная немагнитным слоем 4, вторым немагнитным слоем 5 и поверхностью ротора (ниже именуемые как "первый мост 2b1" и "второй мост 2b2"), постоянна. Желательно, чтобы ширина была как можно меньше во избежание утечки магнитного потока.
Кроме того, существует также ребро ротора (вспомогательное ребро жесткости) 2a, играющее роль магнитного пути между первым немагнитным слоем 4 и вторым немагнитным слоем 5. Достаточный эффект нельзя получить, пропуская магнитный поток постоянного магнита через вспомогательное ребро жесткости 2a.
Постоянный магнит и немагнитный слой не обязаны быть продолжением друг друга. Они могут находиться рядом друг с другом на коротком расстоянии.
Статор мотора согласно настоящему изобретению может иметь распределенную обмотку, как показано на фиг.10, или может иметь сосредоточенную обмотку, как показано на фиг.11. В частности, гармоники 5-го порядка и гармоники 7-го порядка сильно возрастают для сосредоточенной обмотки, поэтому применение настоящего изобретения эффективно.
На фиг.12 и 13 показана схема, иллюстрирующая модифицированные примеры фиг.6.
На фиг.12 показан модифицированный пример, в котором сердечник 2c ротора находится в окрестности обеих сторон постоянного магнита ротора, показанного на фиг.6. Когда первый и второй немагнитные слои 6 и 7 размещены для подавления высших гармоник магнитного потока, текущего от поверхности, можно получить достаточный эффект.
На фиг.13 показан модифицированный пример, в котором слой постоянного магнита находится в области, примыкающей к поверхности ротора. Когда второй немагнитный слой 8 размещен для подавления высших гармоник магнитного потока, текущего от поверхности, также можно получить достаточный эффект. В этом случае необходимо намагничивать постоянный магнит, чтобы магнитный поток на краевой секции постоянного магнита не вытекал в нормальном направлении ротора.
Второй вариант осуществления
На фиг.14 показана схема, иллюстрирующая ротор мотора согласно второму варианту осуществления настоящего изобретения.
В роторе 11 постоянные магниты внедрены внутрь сердечника 12 ротора. Постоянные магниты для каждого полюса разделены на 2 слоя в радиальном направлении (13 - постоянный магнит на внутренней стороне ротора, и 14 - постоянный магнит на внешней стороне ротора). Кроме того, краевые секции периферийного направления 13a и 14a каждого из постоянных магнитов 13 и 14 проходят в окрестности между полюсами к окрестности поверхности ротора.
Краевые секции периферийного направления 13a и 14a постоянного магнита 13 на внутренней стороне ротора и постоянного магнита 14 на внешней стороне ротора независимы друг от друга. Так называемый путь 12а магнитного потока по оси q, образованный сердечником ротора, находится между ними.
Вследствие существования пути 12a магнитного потока по оси q индуктивность Lg по оси q можно увеличить, чтобы можно было в большей степени использовать реактивный момент и чтобы магнитный поток постоянного магнита можно было увеличить без увеличения размера ротора.
Угол θ3 между краевой секцией стороны центра полюса краевой секции 13a периферийного направления постоянного магнита 13 на внутренней стороне ротора и между полюсами и угол θ4 между краевой секцией стороны центра полюса краевой секции периферийного направления 14a постоянного магнита 14 на внутренней стороне ротора и между полюсами определяются как
0 < θ3 < 180/(5·Pn)
и
180/(5·Pn) ≤ θ4 ≤ 180×2/(5·Pn)
или
0 < θ3 < 180/(7·Pn)
и
180/(7·Pn) ≤ θ4 ≤ 180×2/(7·Pn),
где количество пар полюсов равно Pn.
В этом варианте осуществления количество пар полюсов Pn=2. Формулы двух верхних строк используются для ослабления гармоник 5-го порядка. В частности, лучше, когда θ1=9°, θ2=18°. Конечно, формулы двух нижних строк используются для ослабления гармоник 7-го порядка.
Принцип ослабления звука для мотора, имеющего вышеописанную конфигурацию, аналогичен принципу согласно первому варианту осуществления. Таким образом, описание будет опущено.
На фиг.15 показана схема, иллюстрирующая модифицированный пример этого варианта осуществления.
В этом модифицированном примере используются плоские постоянные магниты.
Поэтому звук можно ослаблять, используя этот модифицированный пример.
Третий вариант осуществления
На фиг.16 показана схема, иллюстрирующая конфигурацию мотора согласно третьему варианту осуществления настоящего изобретения.
В роторе 31 множественные постоянные магниты 33 (в этом варианте осуществления ротор имеет 4 полюса, следовательно, 4 постоянных магнита) внедрены внутрь сердечника ротора 32.
Немагнитный слой 34 (ниже именуемый "первый немагнитный слой") проходит в окрестности между полюсами к окрестности поверхности ротора, причем немагнитный слой 34 продолжается до краевой секции периферийного направления каждого постоянного магнита 33. Кроме того, второй немагнитный слой 35 обеспечен на стороне центра полюса первого немагнитного слоя 34 и в окрестности поверхности ротора. При этом немагнитный слой является сквозным отверстием или воздушным слоем.
Угол между краевой секцией стороны центра полюса примыкающей секции к поверхности ротора первого немагнитного слоя 34 и между полюсами выражается как θ5, а угол между краевой секцией стороны центра полюса примыкающей секции к поверхности ротора второго немагнитного слоя 35 и между полюсами выражается как θ6.
Первый немагнитный слой 34 и второй немагнитный слой 35 независимы друг от друга. Вспомогательное ребро жесткости 32a, образованное сердечником ротора, помещено между ними.
Кроме того, ширина секции сердечника ротора (ниже именуемая "первый мост 32b1" и "второй мост 32b2") имеет точки перегиба 36a и 36b, причем секция сердечника ротора прослоена первым немагнитным слоем 34, вторым немагнитным слоем 35 и поверхностью ротора. Углы между соответствующей точкой перегиба 36a, 36b и между полюсами выражаются как θ7 и θ8. Углы θ5, θ6, θ7 и θ8 определяются как
0 < θ5 < 180/(5·Pn)
и
180/(5·Pn) ≤ θ6 ≤ 180×2/(5·Pn)
и
0 < θ7 < 180/(7·Pn)
и
180/(7·Pn) ≤ θ8 ≤ 180×2/(7·Pn)
и
θ7 < θ5 < θ8 < θ6.
В этом варианте осуществления количество пар полюсов Pn равно 2, поэтому углы определяются как θ6=18°, θ8=12,9°, θ5=9°, θ7=6,4°.
При этом точки перегиба 36a и 36b являются точками пересечения пространств, где ширины первого моста 32b1 и второго моста 32b2 постоянны, и пространств, где ширины первого моста 32b1 и второго моста 32b2 постепенно возрастают. Изменение распределения плотности магнитного потока на поверхности ротора становится резким в этих точках. Распределение плотности магнитного потока на поверхности ротора этого варианта осуществления показано на фиг.17.
Как явствует из фиг.17 и описания первого варианта осуществления, гармоники 7-го порядка подавляются точками перегиба 36a и 36b, а гармоники 5-го порядка подавляются краевой секцией стороны центра полюса секции, примыкающей к поверхности ротора, и краевой секцией стороны центра полюса секции, примыкающей к поверхности ротора второго немагнитного слоя 35.
На фиг.18 показано сравнение форм волны напряжения индукции, одна из которых соответствует случаю, когда второй немагнитный слой 35 отсутствует, а другая - этому варианту осуществления. В таблице показано сравнение амплитуды компонентов высших гармоник. Кроме того, на фиг.19 показан компонент высших гармоник шума, когда мотор работает как мотор для компрессора.
Кроме того, формы немагнитных слоев 34 и 35 не ограничиваются формами этого варианта осуществления. Например, может быть полезно, как показано на фиг.20, чтобы ширины мостов 37b1 и 37b2 были разделены на малые секции ширины 37b11, 37b21 и большие секции ширины 37b12, 37b22 и чтобы изменяющиеся точки малых секций ширины 37b11, 37b21 и больших секций ширины 37b12, 37b22 рассматривались как точки перегиба 38a, 38b.
Четвертый вариант осуществления
На фиг.21 показана схема, иллюстрирующая конфигурацию ротора мотора согласно четвертому варианту осуществления настоящего изобретения.
В роторе 41 постоянные магниты внедрены внутрь сердечника 42 ротора. Постоянные магниты разделены на два слоя в радиальном направлении для каждого полюса (43 - постоянный магнит на внутренней стороне ротора и 44 - постоянный магнит на внешней стороне ротора). Кроме того, краевая секция периферийного направления 43a, 44a каждого постоянного магнита 43, 44 проходит в окрестности между полюсами к окрестности поверхности ротора.
Краевые секции периферийного направления 43a, 44a постоянного магнита 43 на внутренней стороне ротора и постоянного магнита 44 на внешней стороне ротора независимы друг от друга. Так называемый путь 42a магнитного потока по оси q, образованный сердечником ротора, помещен между ними.
Наличие пути 42a магнитного потока по оси q позволяет увеличить индуктивность Lg по оси q. Поэтому можно использовать реактивный момент большей части и можно увеличить магнитный поток постоянного магнита без увеличения размера ротора.
Кроме того, краевая секция периферийного направления 43a постоянного магнита 43 на внутренней стороне ротора проходит в окрестности между полюсами к окрестности поверхности ротора, и краевая секция периферийного направления 44a постоянного магнита 44 на внешней стороне ротора также проходит в окрестности между полюсами к окрестности поверхности ротора. При этом на краевых секциях периферийного направления 43a, 44a постоянных магнитов 43, 44 могут существовать воздушные слои и т.п. Угол между краевой секцией стороны центра полюса краевой секции периферийного направления 43a постоянного магнита 43 на внутренней стороне ротора и между полюсами выражается как θ9, и угол между краевой секцией стороны центра полюса краевой секции периферийного направления 44a постоянного магнита 44 на внешней стороне ротора и между полюсами выражается как θ10. Кроме того, ширина секции сердечника ротора (ниже именуемая "первый мост 42b1" и "второй мост 42b2") имеет точки перегиба 46a и 46b, причем секция сердечника ротора прослоена краевой секцией периферийного направления 43a постоянного магнита 43 на внутренней стороне ротора, краевой секцией периферийного направления 44a постоянного магнита 44 на внешней стороне ротора и поверхностью ротора. Углы между соответствующей точкой перегиба 46a, 46b и между полюсами выражаются как θ11 и θ12. Углы θ9, θ10, θ11 и θ12 определяются как
0 < θ9 < 180/(5·Pn)
и
180/(5·Pn) ≤ θ10 ≤ 180×2/(5·Pn)
и
0 < θ11 < 180/(7·Pn)
и
180/(7·Pn) ≤ θ12 ≤ 180×2/(7·Pn)
и
θ11 < θ9 < θ12 < θ10.
В этом варианте осуществления количество пар полюсов Pn равно 2, поэтому углы определяются как θ10=18°, θ12=12,9°, θ9=9°, θ11=6,4°.
Операция и эффект ослабления звука в этом варианте осуществления подобны третьему варианту осуществления, поэтому описание опущено.
Изобретение согласно первому аспекту имеет отличительный эффект в том, что гармоники нечетного порядка, причем нечетное число больше или равно 3, формы волны распределения магнитного потока (формы волны напряжения индукции) можно ослаблять и можно предотвращать возникновение ненужных радиальной силы и осевой силы, в то же время можно поддерживать достаточный магнитный поток.
Изобретение согласно второму аспекту имеет отличительный эффект в том, что гармоники нечетного порядка, причем нечетное число больше или равно 3 и отличается от кратных 3, можно ослаблять и что можно реализовать эффект, аналогичный первому аспекту.
Изобретение согласно третьему аспекту имеет отличительный эффект в том, что гармоники нечетного порядка, причем нечетное число больше или равно 13 и отличается от кратных 3, можно ослаблять и что можно реализовать эффект, аналогичный первому аспекту.
Изобретение согласно четвертому аспекту имеет отличительный эффект в том, что гармоники 5-го порядка или гармоники 7-го порядка можно ослаблять и что можно реализовать эффект, аналогичный второму аспекту.
Изобретение согласно пятому аспекту имеет отличительный эффект в том, что можно повышать механическую прочность и что можно реализовать эффект, аналогичный четвертому аспекту.
Изобретение согласно шестому аспекту имеет отличительный эффект в том, что эффекты, аналогичные четвертому аспекту или пятому аспекту, можно реализовать с учетом симметрии.
Изобретение согласно седьмому аспекту имеет отличительный эффект в том, что можно реализовать устранение шума, и в том, что можно реализовать эффекты, аналогичные четвертому аспекту или пятому аспекту.
Изобретение согласно восьмому аспекту имеет отличительный эффект в том, что эффекты, аналогичные четвертому аспекту или пятому аспекту, можно реализовать с учетом симметрии.
Изобретение согласно девятому аспекту имеет отличительный эффект в том, что можно реализовать устранение шума, и в том, что можно реализовать эффекты, аналогичные четвертому аспекту или пятому аспекту.
Изобретение согласно десятому аспекту имеет отличительный эффект в том, что эффекты, аналогичные аспектам с первого по четвертый, можно реализовать даже если постоянный магнит разделен на множество частей, причем некоторые части соответствуют внутренней стороне ротора, а другие части соответствуют внешней стороне ротора.
Изобретение согласно одиннадцатому аспекту имеет отличительный эффект в том, что эффекты, аналогичные десятому аспекту, можно реализовать с учетом симметрии.
Изобретение согласно двенадцатому аспекту имеет отличительный эффект в том, что можно реализовать устранение шума и что можно реализовать эффекты, аналогичные десятому аспекту.
Изобретение согласно тринадцатому аспекту имеет отличительный эффект в том, что эффекты, аналогичные десятому аспекту, можно реализовать с учетом симметрии.
Изобретение согласно четырнадцатому аспекту имеет отличительный эффект в том, что можно реализовать устранение шума и что можно реализовать эффекты, аналогичные десятому аспекту.
Изобретение относится к области электротехники, а именно к моторам, предназначенным для использования в условиях, требующих устранения шума. Сущность изобретения состоит в том, что в моторе, содержащем сердечник ротора, в который встроено множество постоянных магнитов, краевая секция периферийного направления каждого постоянного магнита или немагнитного слоя, продолжающая или примыкающая к краевой секции периферийного направления каждого постоянного магнита, проходит в окрестности между полюсами к окрестности поверхности ротора, и второй немагнитный слой, который обеспечен в окрестности поверхности ротора в боковой позиции центра полюса относительно краевой секции периферийного направления каждого постоянного магнита или немагнитного слоя, продолжающей или примыкающей к краевой секции периферийного направления каждого постоянного магнита, и в котором немагнитный слой, продолжающий или примыкающий к краевой секции периферийного направления каждого постоянного магнита, и второй немагнитный слой размещены так, чтобы подавлять гармоники n-го порядка напряжения индукции, где n - нечетное число, большее или равное 3. Технический результат - ослабление компонента гармоник нечетного n-го порядка формы волны распределения магнитного потока (формы волны напряжения индукции), например 5-го или 7-го порядка, что ведет к предотвращению возникновения ненужных радиальной и осевой силы, следовательно, к уменьшению шума и повышению точности определения положения ротора мотора при одновременном поддержании достаточной величины магнитного потока. 13 з.п. ф-лы, 21 ил., 1 табл.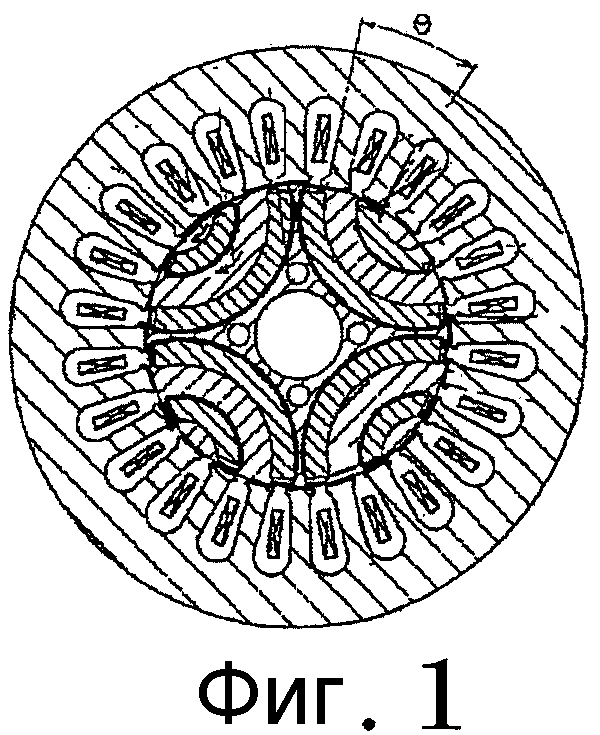
0<θ1<180/(5·Pn)
и
180/(5·Pn)≤θ2≤180×2/(5·Pn)
или
0<θ1<180/(7·Pn)
и
180/(7·Pn)≤θ2≤180×2/(7·Pn),
где количество пар полюсов равно Pn.
0<θ1<180/(5·Pn) и θ2=180/(5·Pn);
либо соотношениям 0<θ1<180/(7·Pn) и θ2=180/(7·Pn).
0<θ5<180/(5·Pn)
и
180/(5·Pn)≤θ6≤180×2/(5·Pn),
где количество пар полюсов равно Pn,
и ширина секции сердечника ротора имеет точки перегиба, причем ширина секции сердечника ротора прослоена краевой секцией периферийного направления каждого постоянного магнита (33) или немагнитного слоя (34), продолжающей или примыкающей к краевой секции периферийного направления каждого постоянного магнита (33), второго немагнитного слоя (35) и поверхности ротора,
углы θ7 и θ8 между соответствующей точкой перегиба и между полюсами определены как
0<θ7<180/(7·Pn)
и
180/(7·Pn)≤θ8<180×2/(7·Pn),
где количество пар полюсов равно Pn,
и соотношение углов θ5, θ6, θ7 и θ8 определено как θ7<θ5<θ8<θ6.
0<θ3<180/(5·Pn)
и
180/(5·Pn)≤θ4≤180×2/(5·Pn)
или
0<θ3<180/(7·Pn)
и
180/(7·Pn)≤θ4≤180×2/(7·Pn),
где количество пар полюсов равно Pn.
0<θ3<180/(5·Pn) и θ4=180/(5·Pn);
либо соотношениям
0<θ3<180/(7·Pn) и θ4=180/(7·Pn).
0<θ9<180/(5·Pn)
и
180/(5·Pn)≤θ10≤180×2/(5·Pn),
где количество пар полюсов равно Pn,
и ширина секции сердечника ротора имеет точки перегиба, причем ширина секции сердечника ротора прослоена краевой секцией периферийного направления постоянного магнита (43) на внутренней стороне ротора или немагнитного слоя, продолжающей или примыкающей к краевой секции периферийного направления постоянного магнита (43), и краевой секцией периферийного направления постоянного магнита (44) на внешней стороне ротора или немагнитного слоя, продолжающей или примыкающей к краевой секции периферийного направления постоянного магнита (44), и углы θ11 и θ12 между соответствующей точкой перегиба и между полюсами определены как
0<θ11<180/(7·Pn)
и
180/(7·Pn)≤θ12≤180×2/(7·Pn),
где количество пар полюсов равно Pn,
и соотношение углов θ9, θ10, θ11 и θ12 определено как θ11<θ9<θ12<θ10.
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Электрическая машина | 1985 |
|
SU1297183A1 |
| Вентильный электродвигатель | 1989 |
|
SU1644312A1 |
| ПАКЕТ ДЛЯ ФОРМИРОВАНИЯ МАГНИТНОЙ СИСТЕМЫ РОТОРА | 2003 |
|
RU2236739C1 |
| Вентильный электродвигатель | 1988 |
|
SU1541721A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| ЩИТОВОЙ ДЛЯ ВОДОЕМОВ ЗАТВОР | 1922 |
|
SU2000A1 |
| Печь-кухня, могущая работать, как самостоятельно, так и в комбинации с разного рода нагревательными приборами | 1921 |
|
SU10A1 |
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |

