Настоящее изобретение относится к способу определения скорости вращения осесимметричного вибрационного датчика и соответствующему инерциальному устройству, содержащему осесимметричный вибрационный датчик. В частности, изобретение относится к датчикам с уходом углового положения колебаний, гармонично зависящим от указанного положения колебаний относительно корпуса прибора.
Уровень техники
Известно, что для определения направления носителя, в частности для обеспечения навигации самолета, можно использовать инерциальное устройство, содержащее один или несколько осесимметричных вибрационных датчиков, использующих резонатор, имеющий симметрию четвертого порядка и более и реализующий две вырожденные моды колебаний, идентичные и ортогональные, дающие искажение, которое имеет периодичность порядка n по отношению к оси симметрии, то есть искажение имеет n раз одну и ту же картину колебаний за один оборот вокруг оси симметрии. В частности, известно использование датчиков второго порядка, таких как вибрационные датчики с полусферическим колпаком, содержащие соответствующее число электродов, или «quapasons», в которых направления колебаний двух мод не являются геометрически ортогональными, но являются модально ортогональными, то есть модально смещенными на π.
Известно также, что осесимметричный вибрационный датчик предназначен для работы в режиме гироскопа или в режиме гирометра. В режиме гироскопа поддерживают колебания, но их положение оставляют свободным; когда направление носителя меняется, положение колебаний относительно основания характеризует угол, на который повернулся носитель.
В режиме гирометра поддерживают колебания, и их положение относительно основания сохраняют неподвижным путем подачи соответствующих команд на электронную схему; величина команды в этом случае характеризует скорость вращения носителя в инерциальном пространстве.
Известно также, что вибрационные гироскопы имеют погрешность ухода, которая при работе гироскопа в режиме гироскопа выражается в изменении положения колебаний, даже когда носитель не совершает никакого поворота. Этот уход содержит две составляющие: постоянную составляющую, которая в случае полусферического резонансного гироскопа составляет порядка нескольких сотых градуса в час, и составляющую, называемую «альтернативным» уходом, которая состоит из гармоник, в основном из гармоники того же порядка n, что и вибрационный датчик, и из гармоники порядка, в два раза превышающего порядок вибрационного датчика, зависящей от положения колебаний. В случае полусферического резонансного гироскопа гармоника порядка n вызывает погрешность ухода порядка одного градуса в час, а гармоника порядка 2n вызывает погрешность ухода порядка одной десятой градуса в час.
Как известно, калибровку гироскопов осуществляют в заводских условиях и составляют таблицы поправок, которые можно применять во время использования гироскопа. Однако погрешность ухода зависит не только от положения колебаний, но также от окружающей температуры и от степени износа гироскопа. Таким образом, на практике возможность внесения поправок является весьма ограниченной.
Цель изобретения
Задачей изобретения является определение скорости вращения осесимметричного вибрационного датчика и сведение к минимуму погрешности ухода.
Сущность изобретения
Чтобы выполнить эту задачу, согласно изобретению предлагается способ определения скорости вращения осесимметричного вибрационного датчика, содержащего колебательный элемент, связанный с электродами управления и детекторными электродами, для создания колебаний, искажение которых имеет периодичность порядка n и положение которых меняется в зависимости от вращения датчика. Способ содержит следующие этапы:
- производят оценку скорости вращения последовательно для числа N положений колебаний по отношению к электродам, при этом положение геометрически смещают на заранее определенный угол и колебания перемещают от одного положения к другому путем подачи команды прецессии с использованием заранее установленного масштабного множителя,
- определяют среднее значение из оценок скорости вращения в N положениях,
при этом число N положений и угол, разделяющий положения, определяют таким образом, чтобы среднее значение оценок позволяло устранить, по меньшей мере, одну из гармоник ухода колебаний.
Вытекающая из гармоник погрешность связана с их амплитудой, а фаза гармоник зависит от положения колебаний. Таким образом, путем усреднения оценки скорости для нескольких положений можно устранить влияние гармоник, используя положения, при которых сумма амплитуд будет нулевой с учетом фазы гармоник в этих положениях, например в положениях, в которых гармоники имеют одинаковую амплитуду по абсолютной величине, но смещены по фазе на 180°. Таким образом, погрешность ухода сводится к минимуму при любой температуре и при любой степени износа датчика.
Предпочтительно оценку скорости производят для N положений колебаний, при этом угловые смещения между положениями связаны с числом N положений и с порядком n искажения моды колебаний следующим соотношением: угловое смещение между положениями =2π/Nn.
Таким образом, угловое смещение между двумя последовательными положениями из N положений составляет:
- π/n при N=2
- 2π/3n при N=3
- π/2n при N=4
- и т.д.
Согласно частному варианту выполнения оценку скорости производят для двух положений колебаний, а именно для первого положения и для второго положения, смещенного на угол π/n относительно первого положения.
Таким образом, устраняют влияние гармоники порядка n. Для двух положений колебаний, смещенных на π/n, гармоника порядка n имеет амплитуду одинакового значения по абсолютной величине, но с противоположными знаками, поэтому при усреднении оценок для двух положений, геометрически смещенных на π/n, модальное смещение равно π, и поэтому амплитуды погрешности, вытекающей из гармоники порядка n, взаимно уничтожаются.
Согласно предпочтительному признаку этого варианта выполнения изобретения оценку скорости осуществляют для двух дополнительных положений колебаний, а именно для положений, геометрически смещенных на π/2n и на 3π/2n относительно первого положения.
Таким образом устраняют не только влияние гармоники, в частности порядка n, но также влияние гармоники порядка 2n. Действительно, между положением, геометрически смещенным на π/2n, и положением, геометрически смещенным на 3π/2n, модальное смещение равно π, поэтому гармоника порядка n оказывается устраненной так же, как и в предыдущем случае. Кроме того, для первоначального положения и положения, геометрически смещенного на π/n, гармоника порядка 2n вызывает погрешность ухода одинаковой амплитуды и одного и того же знака, а для положений, геометрически смещенных на π/2n и на 3π/2n, гармоника порядка 2n вызывает погрешность ухода одинаковой амплитуды и со знаком, противоположным знаку погрешности ухода в первоначальном положении. Таким образом, определив среднее значение для четырех оценок, устраняется погрешность, вытекающая из гармоники порядка 2n.
Согласно второму варианту выполнения оценку скорости производят для трех положений колебаний, а именно для первого положения, второго положения, смещенного на угол 2π/3n относительно первого положения, и для третьего положения, смещенного на 4π/3n относительно первого положения.
Использование трех положений позволяет на основе того же принципа, что и в предыдущем случае, устранить, в частности, гармоники порядка n и 2n.
Благодаря изобретению остаточная погрешность ухода является незначительной и связана с постоянной составляющей, а также с гармониками более высокого порядка, имеющими относительно небольшую амплитуду. В этом случае данную погрешность можно компенсировать во время первоначальной калибровки устройства, и на искажение измерения скорости вращения устройства будут влиять только изменения, изначально малые и компенсированные.
Поскольку погрешности вследствие нелинейности, вызываемые электронными кодирующими устройствами, используемыми для измерения углового положения колебаний, являются максимальными для нулевых входных значений, можно выбрать углы для измерения скорости вращения, избегая нулевых значений на выходе детекторных электродов (входные сигналы угловых кодирующих устройств).
Как правило, усреднение по N положениям позволяет устранить все гармоники, кроме гармоник порядка 2kN, где k является любым целым числом.
В частном случае полусферического вибрационного гироскопа, используемого с искажением второго порядка, то есть n=2:
- выбор двух угловых положений Θ0 и Θ2=Θ0+90° позволяет устранить гармоники порядка 2, 6, 10, 14, 18, 20,
- выбор трех угловых положений Θ0, Θ4=Θ0+60° и Θ5=Θ0+120° позволяет устранить гармоники порядка 2, 4, 8, 10, 14, 16, 20,
- выбор четырех угловых положений Θ0, Θ1=Θ0+45°, Θ2=Θ0+90° и Θ3=Θ0+135° позволяет устранить гармоники порядка 2, 4, 6, 10, 12, 14, 18, 20.
Следует отметить, что выбор трех положений является наиболее предпочтительным, так как при небольшом числе положений он позволяет устранить гармоники 2 и 4, которые являются превалирующими при «альтернативном» уходе, и большее число гармоник второстепенного значения.
Следует также отметить, что описанное изобретение принципиально связывает отклонение измерения скорости вращения между двумя разными положениями колебаний с гармоническим уходом резонатора, следовательно, необходимо, чтобы скорость вращения, сообщаемая датчику, была постоянной в течение всех измерений, без чего нельзя добиться устранения гармонических составляющих ухода. По сути, реальным условием является знание отклонения скорости вращения между периодами времени, соответствующими измерениям, при этом постоянная скорость является только частным случаем, когда это отклонение равно нулю.
Объектом настоящего изобретения является также инерциальное устройство для осуществления способа в соответствии с настоящим изобретением. Это инерциальное устройство содержит осесимметричный вибрационный датчик, содержащий колебательный элемент, связанный с электродами управления и детекторными электродами, средства для возбуждения датчика с целью создания колебаний, средства для оценки скорости вращения датчика для каждого из N положений колебаний относительно электродов, средства для управления прецессией с использованием заранее установленного масштабного коэффициента и средства для определения среднего значения из оценок скорости вращения датчика в N положениях колебаний.
Краткое описание чертежей
Другие признаки и преимущества настоящего изобретения будут более очевидны из нижеследующего описания частного и неограничительного варианта выполнения изобретения со ссылками на прилагаемые чертежи, на которых:
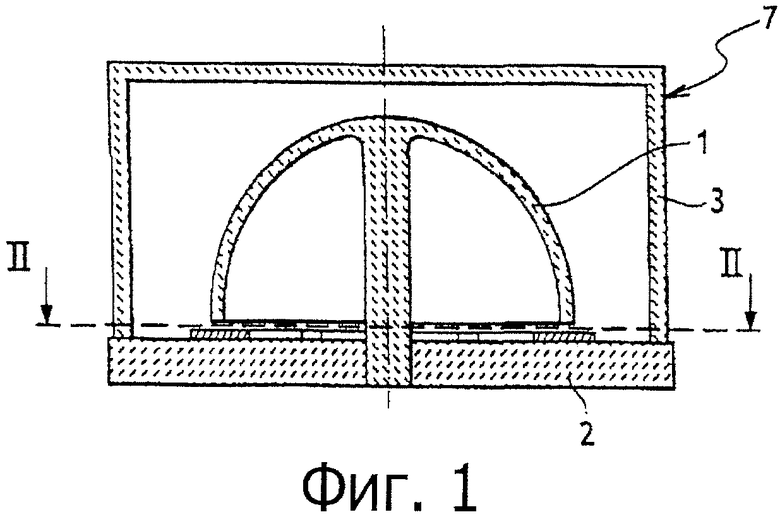
фиг.1 - схематичный вид в осевом разрезе по линии I-I фиг.2 вибрационного датчика с полусферическим колпачком;
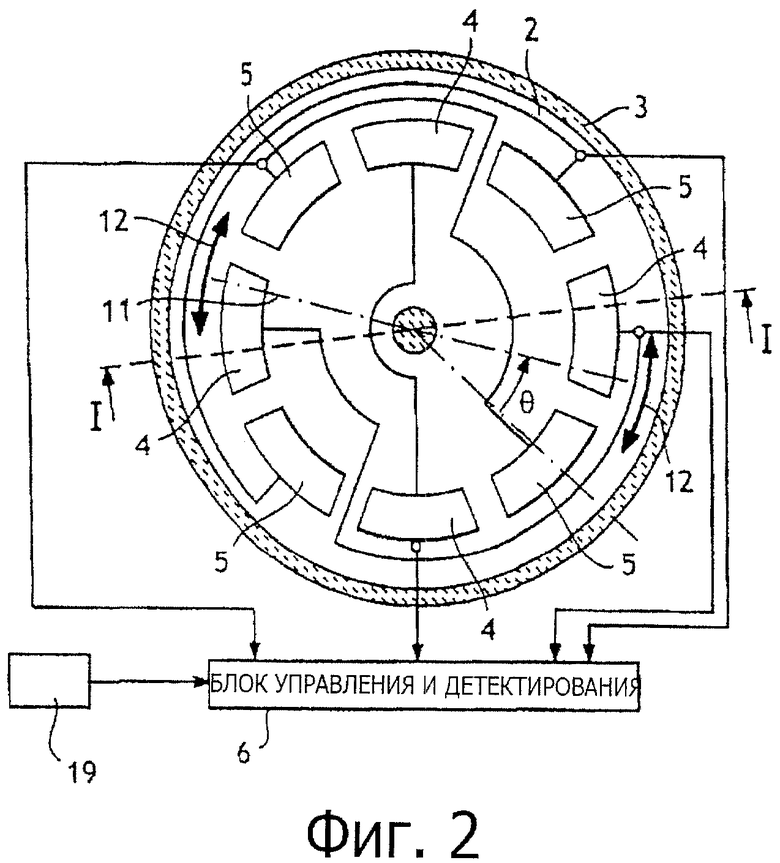
фиг.2 - вид в разрезе по линии II-II фиг.1;
фиг.3 - блок-схема примера осуществления способа в соответствии с настоящим изобретением в различных вариантах применения;
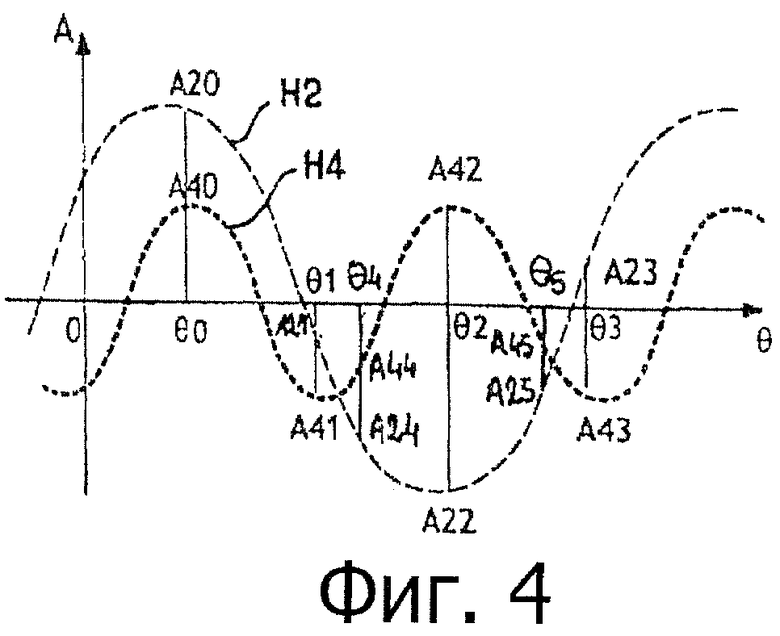
фиг.4 - схема, иллюстрирующая амплитуду гармоники второго порядка и гармоники четвертого порядка в зависимости от положения колебаний относительно контрольного электрода;
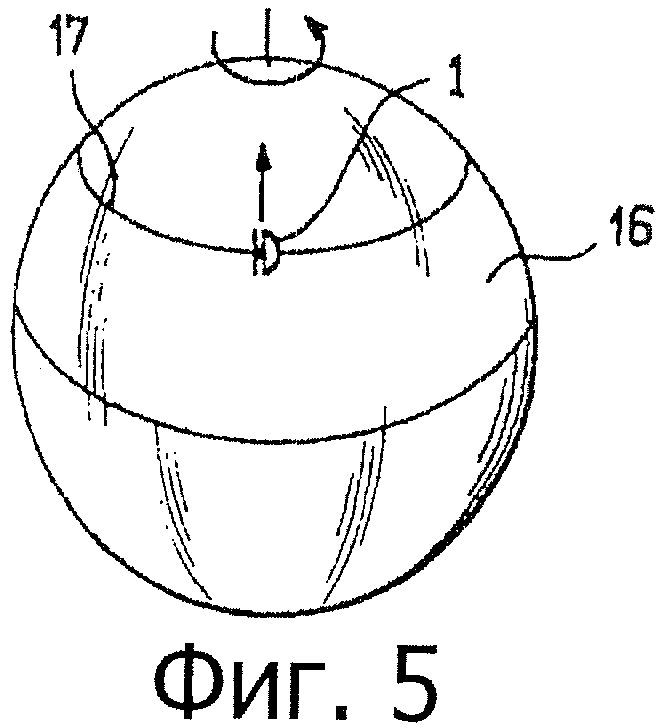
фиг.5 - схематичный вид земного шара и вибрационного датчика с применением изобретения для определения Севера.
Подробное описание изобретения
На фиг.1 и 2 показано инерциальное устройство в соответствии с настоящим изобретением с вибрационным датчиком, имеющим искажение второго порядка. Устройство содержит вибрационный датчик 7 с полусферическим колпаком, содержащий, как известно, колпак 1 из кварца, установленный на основании 2 тоже из кварца, при этом колпак 1 окружен герметичным корпусом 3, позволяющим создавать вокруг датчика вакуум.
Как известно, на внутреннюю поверхность колпака 1 наносят металлическое покрытие, так же как и на его нижний край, который находится напротив двух пар электродов 4 управления и двух пар детекторных электродов 5, соединенных соответствующим образом с блоком 6 управления и детектирования, для создания колебаний 11, которые показаны на фиг.2 пунктирной линией и положение которых обозначено углом Θ по отношению к контрольному электроду 5. Положением колебаний 11 управляет блок 6 управления путем подачи команды прецессии на электроды 4 управления.
Как показано на фиг.3, предпочтительный вариант осуществления способа в соответствии с настоящим изобретением содержит первый этап 8 позиционирования колебаний в первом положении Θ0.
Для первого положения Θ0 колебаний способ содержит этап 9 оценки скорости вращения датчика. Эту оценку скорости вращения, как известно, производят, используя гироскоп в режиме гироскопа или в режиме гирометра.
В случае режима гироскопа производят ряд измерений положения колебаний за короткое время, в течение которого перемещение колебаний является незначительным по сравнению с периодом гармоник второго порядка и четвертого порядка. В частности, в варианте применения способа для определения Севера гироскоп предпочтительно остается неподвижным по отношению к земной поверхности, чтобы максимальная скорость вращения гироскопа соответствовала скорости вращения Земли, то есть скорости вращения 15°/ч. Таким образом, при измерении скорости вращения датчика, производимом в режиме гироскопа в течение десяти секунд, изменением положения колебаний можно пренебречь.
Чтобы избежать любого изменения положения колебаний и избежать погрешностей, связанных с ошибками кодирования положения колебаний, для небольших скоростей вращения предпочтительно оценку производят в режиме гирометра, хотя масштабный коэффициент в этом случае является менее точным, чем в режиме гироскопа.
После этого переходят к этапу изменения 10 положения колебаний путем подачи команды прецессии на электроды 4 управления, затем к оценке 13 скорости вращения датчика в измененном положении. В первом предпочтительном варианте осуществления колебания возбуждают в трех положениях 14 Θ1, Θ2 и Θ3, соответственно смещенных геометрически от первоначального положения Θ, при углах Θi=Θ0+iπ/2n, где i является целым числом от 1 до 3, то есть для n=2 смещений на 45°, 90° и 135°.
После этого вычисляют среднее значение 15 из различных оценок скорости вращения датчика. Как показано на фиг.4, амплитуда А22 гармоники порядка 2 для положения Θ2, смещенного на 90° по отношению к первоначальному положению Θ0, равна по абсолютной величине с противоположным знаком амплитуде А20 гармоники порядка 2 в положении Θ0.
Точно так же, амплитуда А23 гармоники второго порядка для положения Θ4 колебаний имеет такое же значение, но знак, противоположный амплитуде А21 гармоники второго порядка для положения Θ1. Таким образом, во время усреднения погрешности ухода, связанные с гармоникой 2, взаимно уничтожаются парами.
Что касается гармоники четвертого порядка, то амплитуды А41 и А43 для положений с углами Θ1 и Θ3 имеют одинаковое значение, но знак, противоположный амплитудам А40 и А42, для положений колебаний с углами Θ0 и Θ2. Во время определения среднего значения эти четыре значения взаимно компенсируются.
Во втором предпочтительном варианте осуществления колебания возбуждают в двух измененных положениях Θ4, Θ5, соответственно смещенных геометрически от первоначального положения Θ0, при этом Θ4=Θ0+π/3 и Θ5=Θ0+2π/3, то есть со смещением на 60° и на 120°.
Как и в предыдущем случае, производят оценку скорости вращения датчика для каждого из положений Θ0, Θ4, Θ5, после чего осуществляют усреднение различных оценок скорости вращения датчика. Как показано на фиг.4, гармоника второго порядка в положениях Θ4, Θ5 имеет противоположный знак по отношению к положению Θ0, и сумма амплитуд А24 и А25 гармоники второго порядка для положений Θ4 и Θ5 равна по абсолютной величине амплитуде А20 гармоники второго порядка в положении Θ0. Следовательно, сумма амплитуд А20, А24, А25 равна нулю. Точно так же гармоника четвертого порядка в положениях Θ4, Θ5 имеет противоположный знак по отношению к положению Θ0, и сумма амплитуд А44 и А45 гармоники четвертого порядка для положений Θ4 и Θ5 равна по абсолютной величине амплитуде А40 гармоники четвертого порядка в положении Θ0. Следовательно, сумма амплитуд А40, А44, А45 равна нулю.
Во время усреднения погрешности ухода, связанные с гармониками второго и четвертого порядка, взаимно уничтожаются.
По сути дела, в этих двух вариантах выполнения гармоники более высокого порядка уничтожаются так же, как и гармоники второго и четвертого порядка.
Таким образом:
- выбор двух угловых положений Θ0 и Θ2=Θ0+90° позволяет устранить гармоники порядка 2, 6, 10, 14, 18, 20,
- выбор трех угловых положений Θ0, Θ4=Θ0+60° и Θ5=Θ0+120° позволяет устранить гармоники порядка 2, 4, 8, 10, 14, 16, 20,
- выбор четырех угловых положений Θ0, Θ1=Θ0+45°, Θ2=Θ0+90° и Θ3=Θ0+135° позволяет устранить гармоники порядка 2, 4, 6, 10, 12, 14, 18, 20.
В обоих вариантах выполнения первоначальное положение можно выбирать с учетом смещенных положений, чтобы каждое из положений соответствующего сигнала обнаружения имело не равное нулю значение из соображений обеспечения качества преобразования аналогового сигнала, выдаваемого детекторными электродами 5, в цифровой сигнал.
Например, при динамике прецессии в 5°/c необходимо отсчитать примерно десять секунд для изменения положения колебаний на 45°. Кроме того, необходимо отсчитать около пятнадцати секунд, чтобы произвести оценку скорости вращения для данного положения. В случае оценки в четырех положениях следует таким образом считать полное время оценки порядка ста секунд. Это время можно сократить за счет небольшой потери точности, производя оценку только для двух положений, при этом первая оценка соответствует первому положению Θ0, а вторая оценка соответствует второму положению Θ2, смещенному на 90° относительно первого положения. В этом случае погрешность, вытекающая из гармоники второго порядка, устраняется, тогда как погрешность, связанная с гармоникой четвертого порядка, сохраняется. Вместе с тем, в этой связи следует отметить, что в отличие от картины, показанной на фиг.4, где гармоника четвертого порядка сознательно преувеличена для лучшего понимания, на самом деле гармоника четвертого порядка имеет намного меньшую амплитуду, чем гармоника второго порядка. Для полусферического резонансного гироскопа гармоника второго порядка может привести к появлению ухода примерно в один градус в час, тогда как гармоника четвертого порядка может вызывать уход примерно в одну десятую градуса в час.
В этой связи следует отметить, что гармоники второго порядка и четвертого порядка компенсируют друг друга только при условии, если скорость вращения гироскопа остается постоянной в течение всего времени измерений, предназначенных для оценки скорости вращения.
Если даже скорость вращения не является постоянной, все равно изобретение остается в силе. В этом случае достаточно располагать средствами для осуществления измерения 18 изменений скорости вращения и для выполнения алгебраической дедукции исходя из таких изменений скорости вращения, которая оценивается в каждом положении. Эти этапы осуществляют, например, при помощи удаленного гироскопа 19, соединенного с блоком 6 управления и детектирования параллельно с вибрационным датчиком 7. Удаленный гироскоп 19 обладает плохой точностью для абсолютного измерения скорости, но хорошей точностью для измерения отклонений, происходящих за очень короткое время.
Предпочтительно удаленный гироскоп 19 применяют с осуществлением интегрирования измеренных изменений по тем же периодам времени, что и при интегрировании скорости вращения, измеренной вибрационным датчиком. Среднее значение, представляющее собой конечную оценку скорости вращения, в этом случае получают очень просто путем сложения интегралов и деления на общее время, в течение которого проводились измерения скорости вращения.
Способ в соответствии с настоящим изобретением позволяет, в частности, улучшить варианты применения, в которых используется оценка постоянной скорости вращения, в частности определение Севера или выравнивание относительно контрольного элемента.
На фиг.3 и 5 показан вариант применения определения Севера, когда инерциальное устройство, содержащее вибрационный датчик 1, является неподвижным по отношению к земному шару 16. С учетом вращения земли вокруг оси Север-Юг вибрационный датчик 1, ось симметрии которого расположена параллельно касательной к параллели 17, проходящей через датчик, то есть в направлении Восток-Запад, не подвергается никакому вращению. Начиная с направления, при котором датчику сообщается скорость вращения, не равная нулю, способ для такого варианта применения содержит, как известно, этап сравнения 20 скорости вращения датчика со скоростью вращения контрольного элемента, то есть со скоростью вращения земного шара в случае носителя, находящегося на земле, и этап 21 определения направления датчика путем применения тригонометрических формул, дающих составляющую вращения вибрационного датчика в зависимости от его направления. Точность оценки скорости вращения, достигаемая при помощи заявленного способа, позволяет осуществлять этот вариант применения с повышенной точностью для определения Севера. Чтобы получить более высокую точность определения Севера, предпочтительно ось симметрии гироскопа располагают приблизительно вдоль направления Восток-Запад.
В случае выравнивания инерциального устройства перед полетом предпочтительно инерциальное устройство содержит три вибрационных датчика, оси которых расположены в ортогональных направлениях.
Согласно еще одному признаку настоящего изобретения изменение положения колебаний для оценки скорости вращения позволяет осуществить сравнение 22 между командой прецессии и изменением положения колебаний и произвести вычисление 23 обновленного масштабного коэффициента, который можно сразу использовать для оценки скорости вибрационного датчика.
Предпочтительно различные этапы способа в соответствии с настоящим изобретением осуществляют при помощи прикладных программ, установленных в блоке 6 управления, который вместе с вибрационным датчиком образует инерциальное устройство.
Разумеется, изобретение не ограничивается описанными вариантами выполнения и может включать варианты реализации, которые может осуществить специалист, не выходя за рамки изобретения, определенные формулой изобретения.
В частности, несмотря на то, что варианты применения были описаны для вибрационного датчика, неподвижного по отношению к земле, способ в соответствии с настоящим изобретением можно также применять, когда инерциальное устройство установлено в носителе, подвижном относительно земли.
Хотя изобретение было описано в связи с гироскопом второго порядка (n=2), его можно также применять для гироскопа более высокого порядка. В этом случае угловые отклонения между положениями, которые зависят от числа положений и от порядка n модального искажения колебаний, будут иметь значение 2π/Nn, то есть:
- π/n для N=2
- 2π/3n для N=3
- π/2n для N=4
- и т.д.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ПУТЕМ ПОВОРОТА ИНЕРЦИАЛЬНОГО УСТРОЙСТВА | 2010 |
|
RU2499225C1 |
| ВИБРАЦИОННЫЙ ГИРОСКОП | 2015 |
|
RU2577553C1 |
| ИНТЕГРИРУЮЩИЙ МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2005 |
|
RU2296300C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ГИРОСКОПИЧЕСКИХ ИЗМЕРЕНИЙ С ИСПОЛЬЗОВАНИЕМ ВИБРАЦИОННОГО ГИРОСКОПА | 2009 |
|
RU2528037C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КУРСА ПУТЕМ ПОВОРОТА ИНЕРЦИАЛЬНОГО УСТРОЙСТВА | 2010 |
|
RU2499223C1 |
| Способ непрерывного съёма навигационной информации с кориолисова вибрационного гироскопа | 2016 |
|
RU2662456C2 |
| СПОСОБ КАЛИБРОВКИ УГЛОВ РАССОГЛАСОВАНИЯ ОСИ ДАТЧИКА УГЛА НЕУПРАВЛЯЕМОГО ГИРОСКОПА ОТНОСИТЕЛЬНО ОСИ ВРАЩЕНИЯ ЕГО КОРПУСА | 2005 |
|
RU2308683C1 |
| СПОСОБ УСТРАНЕНИЯ ЗОНЫ НЕЧУВСТВИТЕЛЬНОСТИ В ВОЛОКОННО-ОПТИЧЕСКОМ ГИРОСКОПЕ | 2011 |
|
RU2472111C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛА КОМПЕНСАЦИИ ФАЗОВЫХ ИСКАЖЕНИЙ ПРИНИМАЕМЫХ СИГНАЛОВ, ОТРАЖЕННЫХ ОТ ОБЛУЧАЕМОГО ОБЪЕКТА ВИЗИРОВАНИЯ, С ОДНОВРЕМЕННЫМ ЕГО ИНЕРЦИАЛЬНЫМ ПЕЛЕНГОВАНИЕМ И ИНЕРЦИАЛЬНЫМ АВТОСОПРОВОЖДЕНИЕМ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2526790C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОГРЕШНОСТЕЙ ИНЕРЦИАЛЬНЫХ ИЗМЕРИТЕЛЬНЫХ ПРИБОРОВ ПРИ ИСПЫТАНИЯХ НА УДАРНЫЕ И ВИБРАЦИОННЫЕ ВОЗДЕЙСТВИЯ | 2013 |
|
RU2545489C1 |
Изобретение относится к определению скорости вращения осесимметричного вибрационного датчика, содержащего колебательный элемент, связанный с электродами управления и детекторными электродами. Способ включает оценку скорости вращения последовательно для числа N положений колебаний по отношению к электродам, при этом положение геометрически смещают на заранее определенный угол и колебания смещают от одного положения к другому путем подачи команды прецессии с использованием заранее установленного масштабного коэффициента. Определяют среднее значение из оценок скорости вращения для N положений, при этом число N положений и угол, разделяющий положения, определяют таким образом, чтобы среднее значение оценок позволяло устранить, по меньшей мере, одну компоненту гармонического ухода колебаний. Изобретение позволяет свести к минимуму погрешности ухода. 2 н. и 13 з.п. ф-лы, 5 ил.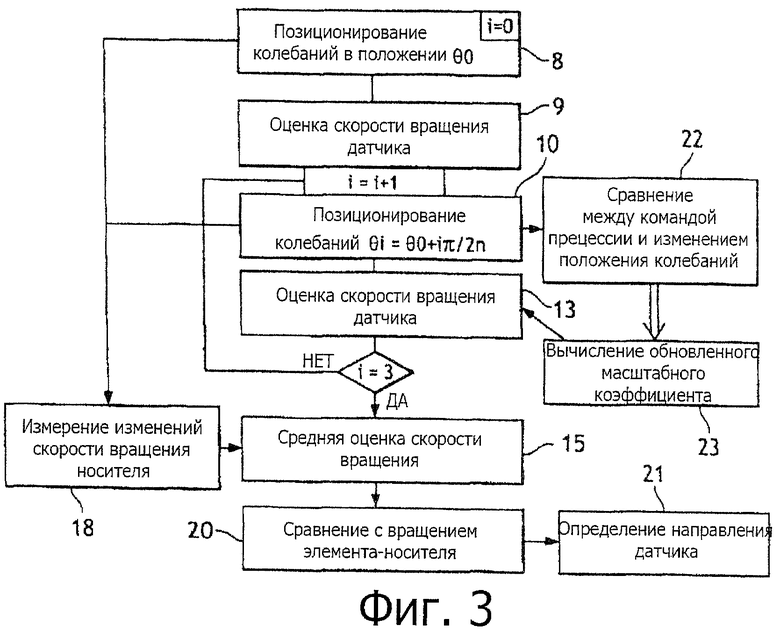
1. Способ определения скорости вращения осесимметричного вибрационного датчика (7), содержащего колебательный элемент (1), связанный с электродами (4) управления и детекторными электродами (5), для создания колебаний, искажение которых имеет периодичность порядка n, и положение (Θ) которых меняется в зависимости от вращения датчика, отличающийся тем, что содержит следующие этапы:
производят оценку скорости вращения последовательно для числа N положений колебаний по отношению к электродам, при этом положения геометрически смещают на заранее определенный угол и колебания смещают от одного положения к другому путем подачи команды прецессии с использованием заранее установленного масштабного коэффициента,
определяют среднее значение из оценок скорости вращения в N положениях, при этом число N положений и угол, разделяющий положения, определяют таким образом, чтобы среднее значение указанных оценок позволяло устранить, по меньшей мере, одну составляющую гармонического ухода колебаний.
2. Способ по п.1, в котором оценку скорости производят для N положений колебаний, при этом угловые смещения между положениями связаны с числом N положений и с порядком n модального искажения колебаний соотношением: угловое смещение между положениями =2π/Nn.
3. Способ по п.1, в котором оценку скорости производят для двух положений колебаний, а именно для первого положения (Θ0) и для второго положения, смещенного на угол π/n относительно первого положения.
4. Способ по п.2, в котором оценку скорости осуществляют для двух дополнительных положений колебаний, а именно для положений, геометрически смещенных на источник π/2n и на 3π/2n относительно первого положения.
5. Способ по п.1, в котором оценку скорости производят для трех положений колебаний, а именно для первого положения (Θ0), второго положения, смещенного на угол 2π/3n относительно первого положения, и для третьего положения, смещенного на 4π/3n относительно первого положения.
6. Способ по п.1, отличающийся тем, что содержит предварительный этап подачи команды на возбуждение колебаний в угловых положениях, выбираемых таким образом, чтобы соответствующий детектируемый сигнал имел значение, не равное нулю.
7. Способ по п.1, отличающийся тем, что содержит следующие этапы:
осуществляют сравнение (22) между командой прецессии и соответствующим изменением действительного угла, и
на его основании выводят обновленное значение (23) масштабного коэффициента.
8. Способ по п.1, отличающийся тем, что содержит следующие этапы:
измеряют (18) изменения скорости вращения датчика и осуществляют алгебраическую дедукцию, исходя из измеренных изменений при усреднении оценок скорости вращения.
9. Инерциальное устройство, содержащее осесимметричный вибрационный датчик (7), содержащий колебательный элемент (1), связанный с электродами (4) управления и детекторными электродами (5), средства (6) возбуждения датчика для генерирования колебаний, отличающееся тем, что содержит средства для оценки (9) скорости вращения датчика для каждого из N положений колебаний относительно электродов, средства для управления прецессией (10) с использованием заранее установленного масштабного коэффициента, пока колебания не дойдут до каждого из N положений, и средства для определения среднего значения (15) из оценок скорости вращения датчика в N положениях колебаний.
10. Устройство по п.9, в котором оценку скорости производят для N положений колебаний, при этом угловые смещения между положениями связаны с числом N положений и с порядком n модального искажения колебаний соотношением: угловое смещение между положениями =2π/Nn.
11. Устройство по п.10, в котором оценку производят для двух положений колебаний, а именно для первого положения (Θ0) и для второго положения, смещенного на угол π/n относительно первого положения.
12. Устройство по п.11, в котором оценку скорости осуществляют для двух дополнительных положений колебаний, геометрически смещенных на π/2n и на 3π/2n относительно первого положения.
13. Устройство по п.12, в котором оценку скорости производят для трех положений колебаний, а именно для первого положения (Θ0), второго положения, смещенного на угол 2π/3n относительно первого положения, и для третьего положения, смещенного на 4π/3n относительно первого положения.
14. Устройство по п.9, отличающееся тем, что содержит:
средства для сравнения (22) между каждой командой прецессии и соответствующим изменением действительного угла, и
средства для определения обновленного значения (23) масштабного коэффициента.
15. Устройство по п.9, отличающееся тем, что содержит:
средства (19) для измерения изменений скорости вращения датчика и средства для выполнения алгебраической дедукции, исходя из измеренных изменений во время усреднения оценок скорости вращения.
| Лесная сеялка | 1986 |
|
SU1445580A1 |
| US 5712427 A, 27.01.1998 | |||
| US 5616864 A, 01.04.1997 | |||
| СПОСОБ БАЛАНСИРОВКИ ПОЛУСФЕРИЧЕСКОГО РЕЗОНАТОРА ВОЛНОВОГО ТВЕРДОТЕЛЬНОГО ГИРОСКОПА | 1998 |
|
RU2147117C1 |
| СИСТЕМА ПОДАВЛЕНИЯ КВАДРАТУРНОЙ ВИБРАЦИИ ПОЛУСФЕРИЧЕСКОГО РЕЗОНАТОРА | 1991 |
|
RU2036476C1 |

