Изобретение относится к высокоточному артиллерийскому вооружению, в частности к корректируемым артиллерийским снарядам (КАС).
Известен (1) способ наведения КАС, вращающегося на участке коррекции со скоростью 4-10 об/с и наводящегося на цель по отраженному от цели лазерному лучу с использованием импульсной коррекции траектории, заключающийся в том, что на участке коррекции по показаниям неподвижно закрепленной в КАС оптико-электронной головки вычисляют углы пеленга цели, а частоту вращения снаряда (Wx) определяют по приращению фазового угла пеленга цели за несколько периодов подсвета цели, затем по показаниям флюгерных датчиков (ФД) вычисляют углы атаки и скольжения, по показаниям датчика температуры из таблицы определяют время формирования равнодействующей тяги импульсных двигателей коррекции (ИДК) и вычисляют моменты их включения.
Недостатком этого способа, принятого за прототип, является наличие подвижных частей, невысокая точность определения углов атаки α и скольжения β при использовании ФД из-за наличия неучитываемых нелинейностей при взаимодействии набегающего потока и элементов снаряда, механических и электрических погрешностей при съеме информации о положении флюгеров через датчики углов.
Задачей предлагаемого изобретения является повышение точности определения α и β при одновременном упрощении конструкторских решений при реализации предлагаемого способа формирования сигнала наведения КАС на цель при каждой коррекции и проведение контроля за результатом каждой коррекции.
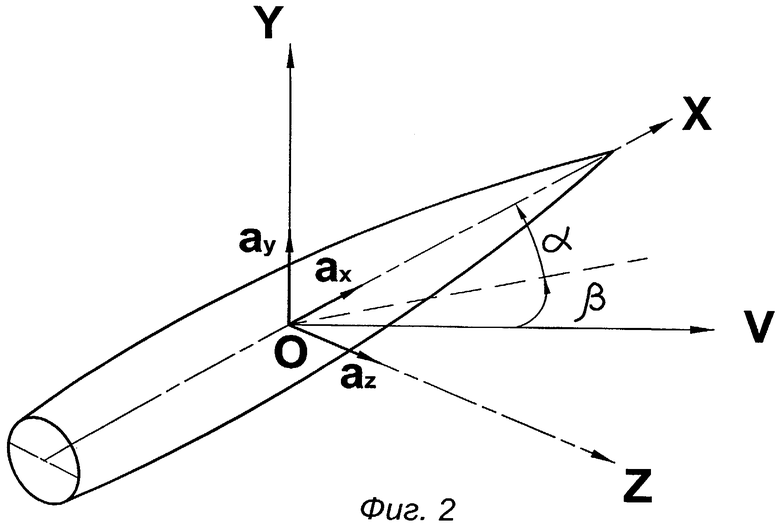
Технический результат достигается за счет того, что при способе формирования сигнала наведения КАС (пункт 1 формулы изобретения), заключающемся в том, что в КАС (фиг.1), содержащем лазерный индикатор-координатор цели (ЛИК), бортовой вычислитель (БВ), устройство коррекции траектории (УК), сигналы с ЛИК обрабатывают в БВ, получают углы пеленга в связанной с КАС системе координат, а с помощью блока датчиков линейных ускорений (ДЛУ), расположенного на продольной оси КАС, измеряют проекции кажущегося ускорения снаряда (КУ), обрабатывают полученные сигналы в БВ и получают величины углов атаки αсв и скольжения βсв в связанной системе координат (ССК), затем суммируют их значения с углами пеленга в соответствующих плоскостях ССК, рассчитывают угол упреждения цели и формируют сигнал наведения, причем при коррекции траектории регистрируют превышение заданного значения измеренными значениями проекций кажущегося ускорения ау по оси у и аz по оси z.
Сущность изобретения по пункту 2 формулы заключается в измерении кажущегося ускорения с помощью 3-х ДЛУ, установленных в центре масс КАС с измерительными осями, совпадающими с осями ССК, что упрощает расчет αсв и βсв, в частности, для углов α и β<15° при известных значениях аэродинамических характеристик Сх и  после измерения проекций кажущегося ускорения ax, ау и аz, αсв и βсв определяют по формулам:
после измерения проекций кажущегося ускорения ax, ау и аz, αсв и βсв определяют по формулам:
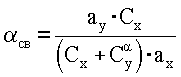
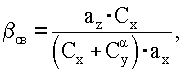
где ax, ay, az - измеренные значения проекций кажущегося ускорения КАС на оси ССК,
Сх - коэффициент лобового сопротивления КАС,
- производная коэффициента подъемной силы КАС по углу атаки α.
Полученные выражения обеспечивают для дозвуковых скоростей полета на участке коррекции вычисление αсв и βсв с более высокой точностью, чем у прототипа.
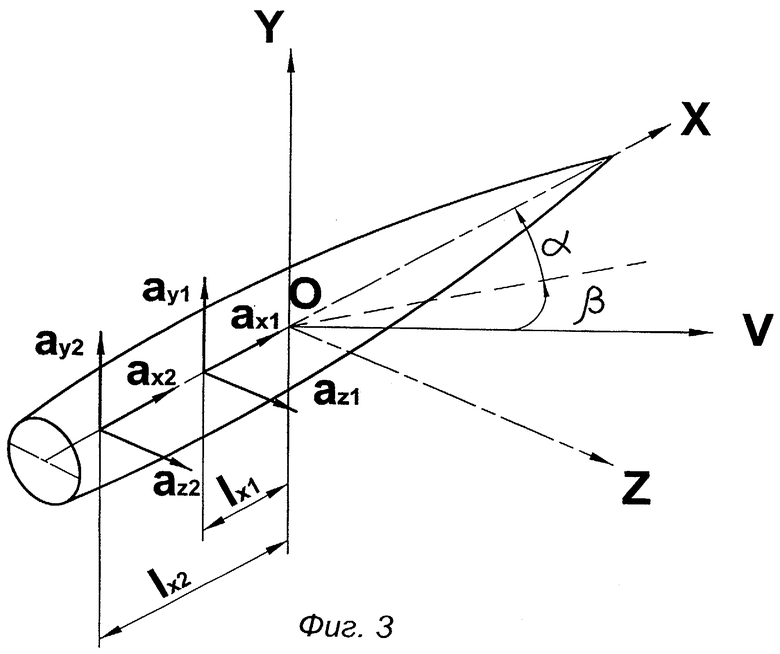
Сущность предлагаемого изобретения по пункту 3 формулы заключается в том, что, если конструкция КАС не позволяет размещать блок из 3-х ДЛУ в центре масс снаряда, тогда для сохранения высокой точности определения углов атаки и скольжения КАС снабжают дополнительным блоком из 2-х ДЛУ с измерительными осями, перпендикулярными друг другу и продольной оси КАС, при этом первый и дополнительный блоки ДЛУ устанавливают на разных расстояниях от центра масс КАС, а сигналы от ДЛУ обрабатывают в бортовом вычислителе и получают значения углов атаки и скольжения.
Смещение датчиков от центра масс приводит к воздействию на датчики переносных угловых ускорений, обусловленных колебаниями КАС относительно экваториальных осей OY, OZ. В снимаемых с ДЛУ сигналах содержится информация как об угле атаки, так и угловой скорости колебаний КАС относительно экваториальной оси.
Используя сигналы, поступающие с этих датчиков, определяют значения углов атаки и скольжения в БВ по формулам:
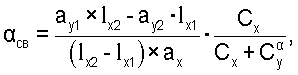
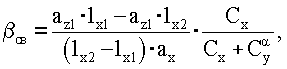
где lx1, lх2 - расстояния от центра масс КАС до первого и второго блоков ДЛУ по продольной оси КАС соответственно;
ay1, az1, аy2, az2 - проекции КУ на оси У и Z первого и второго блоков ДЛУ.
В полученных выражениях не используются инерционные характеристики и моментные характеристики, что упрощает способ и уменьшает ошибку при вычислении αсв и βсв, так как ошибка измерения обусловлена только точностью установки ДЛУ относительно центра масс КАС. Вычисленные в БВ значения αсв и βсв затем суммируют с углами пеленга, измеряемыми с помощью ЛИК, и формируют сигнал наведения КАС.
Предлагаемый в пункте 2 формулы способ может быть реализован по схеме, показанной на фиг.2, с помощью устройства наведения КАС (фиг.1), содержащего:
- лазерный индикатор-координатор (ЛИК) цели для определения пеленга цели в связанной системе координат;
- датчики линейных ускорений (ДЛУ), расположенные вблизи центра масс КАС, измерительные оси которых направлены по осям X, У, Z связанной системы координат;
- устройство коррекции с импульсными двигателями коррекции (УК);
- бортовой вычислитель (БВ) для обработки сигналов, поступающих с ЛИК и ДЛУ и формирования сигналов наведения для УК.
Устройство наведения КАС работает следующим образом.
После начала движения КАС активизируют ЛИК и ДЛУ, обрабатывают в БВ сигналы, поступающие от них, получают значения α и β, затем на участке коррекции вырабатывают сигналы наведения для запуска УК, причем при работе УК производят регистрацию факта коррекции по превышению величиной кажущегося ускорения заданного уровня.
В случае невозможности реализации изобретения по пункту 2 формулы способа реализуют КАС согласно пункту 3 формулы изобретения с использованием дополнительного блока из двух ДЛУ по схеме, показанной на фиг.3, причем блоки ДЛУ можно располагать по одну сторону или по разные стороны от центра масс КАС.
Изобретение реализовано с использованием акселерометров, выдерживающих перегрузки при производстве артиллерийского выстрела и измеряющих на траектории полета КАС проекции кажущегося ускорения величиной до 6g.
Предлагаемое изобретение позволяет упростить конструкцию КАС и повысить точность определения α и β.
Источники информации
1. RU 2231735 C1, 27.06.2004, F41G 7/22.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способы определения значений углов ориентации в процессе движения летательного аппарата и коррекции значений углов ориентации | 2020 |
|
RU2776856C2 |
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕГОСЯ СНАРЯДА ПО ОТРАЖЕННОМУ ОТ ЦЕЛИ ЧАСТОТНОМУ ЛАЗЕРНОМУ ИЗЛУЧЕНИЮ | 2003 |
|
RU2231735C1 |
| СПОСОБ ВЫВОДА РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2013 |
|
RU2542691C1 |
| МАЛОГАБАРИТНАЯ УПРАВЛЯЕМАЯ ВРАЩАЮЩАЯСЯ РАКЕТА | 2014 |
|
RU2561319C1 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
| Способы коррекции показаний инерциальной части радиоинерциальной системы навигации | 2023 |
|
RU2840478C2 |
| СПОСОБ ИНЕРЦИАЛЬНОГО НАВЕДЕНИЯ ВРАЩАЮЩЕГОСЯ ПО КРЕНУ СНАРЯДА | 2015 |
|
RU2584403C1 |
| СПОСОБ СТРЕЛЬБЫ ПО МАЛОРАЗМЕРНЫМ ЦЕЛЯМ ВРАЩАЮЩИМСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ САМОНАВОДЯЩИМСЯ НА КОНЕЧНОМ УЧАСТКЕ ПОЛЕТА ПО БАЛЛИСТИЧЕСКОЙ ТРАЕКТОРИИ КОРРЕКТИРУЕМЫМ АРТИЛЛЕРИЙСКИМ СНАРЯДОМ | 2009 |
|
RU2426970C2 |
| СПОСОБ ПРИЦЕЛИВАНИЯ ПРИ АТАКЕ СКОРОСТНЫХ ЦЕЛЕЙ ИСТРЕБИТЕЛЕМ ПО СПРЯМЛЕННОЙ ТРАЕКТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2000 |
|
RU2170907C1 |
| АРТИЛЛЕРИЙСКАЯ УСТАНОВКА И АРТИЛЛЕРИЙСКИЙ ВЫСТРЕЛ К НЕЙ | 1993 |
|
RU2082939C1 |
Изобретение относится к области артиллерийского вооружения и может быть использовано при создании корректируемых артиллерийских снарядов (КАС). Технический результат - повышение точности при одновременном упрощении. Согласно изобретению устанавливают на продольной оси КАС датчики линейного ускорения (ДЛУ), с помощью которых измеряют кажущиеся ускорения снаряда по осям X, Y, Z в связанной системе координат, затем в бортовом вычислителе определяют углы атаки и скольжения. Формируют сигнал наведения КАС, а при проведении коррекции траектории с помощью ДЛУ контролируют наличие воздействия перегрузок на КАС, превышающих заданный уровень кажущихся ускорений. 2 з.п. ф-лы, 3 ил.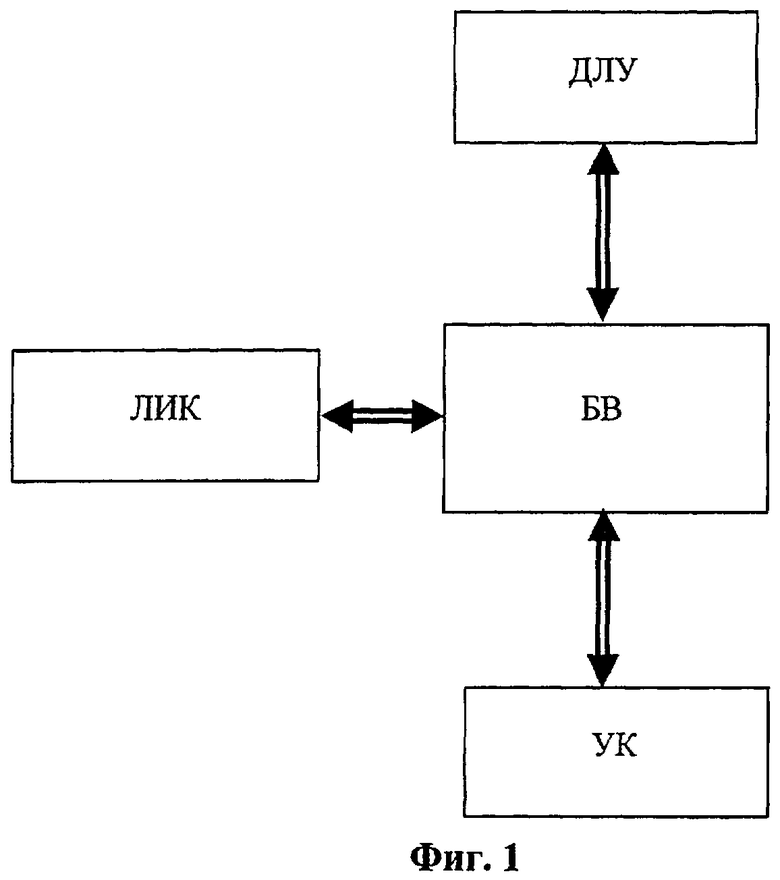
| СПОСОБ И СИСТЕМА НАВЕДЕНИЯ ВРАЩАЮЩЕГОСЯ СНАРЯДА ПО ОТРАЖЕННОМУ ОТ ЦЕЛИ ЧАСТОТНОМУ ЛАЗЕРНОМУ ИЗЛУЧЕНИЮ | 2003 |
|
RU2231735C1 |
| СПОСОБ УПРАВЛЕНИЯ СНАРЯДОМ | 1992 |
|
RU2021577C1 |
| СИСТЕМА УПРАВЛЕНИЯ САМОНАВОДЯЩИМСЯ ВРАЩАЮЩИМСЯ СНАРЯДОМ | 2001 |
|
RU2210717C2 |
| US 4589610 A, 20.05.1986 | |||
| US 4542870 A, 24.09.1985. | |||

