Изобретение относится к области разработки систем управления вращающимися по крену беспилотными летательными аппаратами и может быть использовано в комплексах управляемого артиллерийского вооружения и других комплексах вооружения, в которых применяется комбинированное наведение снаряда на цель: баллистический полет после выстрела, затем инерциальное наведение с постоянным углом наклона траектории и точное наведение на цель (например, самонаведение) на конечном участке траектории.
Известен способ стабилизации углового положения [«152-мм выстрел 3ВОФ64 (3ВОФ93) с осколочно-фугасным управляемым снарядом 3ОФ39 с полным переменным (уменьшенным переменным) зарядом. Техническое описание и инструкция по эксплуатации» М.: Военное издательство, 1990, пункт 7.2.2] вращающегося по крену управляемого артиллерийского снаряда, включающий измерение одноканальным релейным датчиком угла между осью гироскопа инерциального и осью снаряда во вращающейся по крену системе координат, реализуемой гироскопом инерциальным после разарретирования, и формирование сигналов управления одноканальным релейным рулевым приводом на время превышения углом величин контактных секторов датчика. Разарретирование гироскопа инерциального осуществляется в определенный момент времени, отсчитываемый от момента старта. Токосъемник датчика связан с наружной рамкой гироскопа инерциального, а контактные сектора датчика - с корпусом снаряда.
Формирование сигналов управления одноканальным рулевым приводом производится при превышении угла между осью гироскопа инерциального и осью снаряда пороговых значений в соответствии с зависимостью:

где b1, b2 - контактные сектора датчика гироскопа инерциального, b1>0, b2<0;
αГИ - угол между осью гироскопа инерциального и осью снаряда во вращающейся по крену системе координат, определяемый в соответствии с зависимостью:

где
γ - угол крена снаряда, отсчитываемый от вертикальной плоскости;
ϑГИ, ΨГИ - углы наклона и поворота гироскопа инерциального в невращающейся по крену системе координат;
ϑ, Ψ - углы наклона и поворота оси снаряда в невращающейся по крену системе координат;

где
Δ - модуль угла пеленга, т.е. модуль угла между продольной осью снаряда и осью ротора гироскопа в невращающейся по крену системе координат;
Известен способ стабилизации углового положения снаряда, принятый за прототип [патент РФ 2401981, F42B 15/01], в котором формирование сигналов управления на участке инерциального наведения производится в два канала управления UY, UZ, при этом сигналы управления формируются в первую очередь в канале Y, при недостаточной для компенсации веса команде канала Y формируется команда компенсации веса в канале Z. При этом система инерциального наведения включает в себя гироскоп инерциальный на кардановом подвесе, датчик, контактные сектора которого жестко связаны с корпусом снаряда, а токоподвод - с осью наружной рамки карданного подвеса, и формирователь сигналов управления, определяющий алгоритм формирования сигналов управления.
В формирователе сигналов управления, на вход которого подаются сигналы с контактных секторов датчика гироскопа инерциального Ub1, Ub2, Ub3, определяемые в соответствии с зависимостями:

где
b1, b2 и b3, - величины контактных секторов датчика гироскопа инерциального, причем b1>0 и b2<0 близки по модулю, величина b3 близка к 0,
формируются сигналы управления на вход рулевого привода UY, UZ в соответствии со следующим алгоритмом:
если в течение последнего периода вращения снаряда по крену сигнал Ub1 был равен 0, осуществляют операции

где L, M - целочисленные величины с начальными значениями L=0, M=0, соответствующие количеству отсутствующих или присутствующих импульсов с ламели b1;
если в течение последнего периода вращения снаряда по крену сигнал Ub1 принимал ненулевое значение, осуществляют операции

если величина M достигает заданного значения N, определяющего временной интервал, то осуществляют операции:

где R=1, 2, …, 5 - номер режима, начальное значение R=1;
если величина L достигает значения N,

сигналы на входе рулевого привода UY, UZ формируют в соответствии с зависимостями:






сигнал 
где T - период следования импульсов сигнала Ub3.
Способ угловой стабилизации вращающегося по крену снаряда, описанный в прототипе, осуществляет угловую стабилизацию снаряда. Стабилизация по угловой скорости снаряда не осуществляется. Но при управлении слабодемпфированными снарядами отсутствие стабилизации по угловой скорости может привести к возникновению колебаний оси снаряда с недопустимо большой амплитудой, что приведет к ошибке в удержании пеленга снаряда. Кроме того, на участке баллистического полета до начала угловой стабилизации также могут возникать колебания, приводящие к недопустимому отклонению оси гироскопа инерциального в момент разарретирования гироскопа и вследствие этого к невстреливанию снаряда в зону захвата гироскопической головкой самонаведения цели.
Задачей предлагаемого изобретения является обеспечение стабилизации снаряда по угловой скорости на участках баллистического полета и угловой стабилизации при минимальных доработках аппаратуры управления.
Поставленная задача достигается тем, что в способе инерциального наведения вращающегося по крену снаряда, включающем измерение датчиком угла инерциального гироскопа рассогласования между положением продольной оси снаряда и положением оси гироскопа инерциального, формирование сигналов управления при превышении указанного рассогласования пороговых значений, измеряют угловые скорости снаряда в связанной со снарядом вращающейся по крену системе координат относительно двух взаимно ортогональных поперечных осей снаряда и формируют дополнительные сигналы управления при превышении угловой скорости снаряда пороговых значений. Величина пороговых значений по угловой скорости определяется из условия обеспечения требуемой амплитуды колебаний снаряда по углам атаки и скольжения. Дополнительные сигналы управления с датчиков угловых скоростей формируют также на баллистическом участке траектории до начала инерциального наведения.
В предлагаемом способе инерциального наведения, включающем формирование сигналов управления UY, UZ, измеряют угловые скорости снаряда относительно двух взаимно ортогональных поперечных осей ωy и ωz и формируют дополнительные сигналы управления в соответствии с зависимостями:
где а 1, …, a 4 - пороговые значения угловых скоростей, a 1>0, a 2<0; а 3>0, а 4<0, суммируют сигналы каналов Y и Z в соответствии с зависимостями:

и отклоняют аэродинамические рули в соответствии с зависимостями:

где δmax - максимальный по модулю угол отклонения рулей.
Сущность предлагаемого способа поясняет структурная схема, представленная фиг. 1.
На фиг. 1 обозначено:
1 - гироскоп инерциальный (ГИ);
2 - датчик ламельный (Д);
3 - формирователь сигналов угловой стабилизации снаряда (ФС);
4 - датчик угловых скоростей канала Z (ДУСZ);
5 - формирователь сигналов управления в канале Y (ФY);
6 - датчик угловых скоростей канала Y (ДУСY);
7 - формирователь сигналов управления в канале Z (ФZ);
8 - первый сумматор (Сум1);
9 - второй сумматор (Сум2);
10 - привод рулевой (РП).
Система функционирует следующим образом. Сигналы с датчика (2) гироскопа инерциального (1) поступают в формирователь команд управления (3), формирующий на участке инерциального наведения сигналы UY, UZ. Датчик ДУCZ (4) измеряет угловую скорость колебаний снаряда ωz. Датчик ДУСY (6) измеряет угловую скорость снаряда ωy. Формирователь ФY (5) формирует сигнал UY1 с ДУСZ; ФZ (7) - сигнал с ДУСY UZ1 при превышении угловых скоростей пороговых значений. Сумматор Сум1 (8) суммирует сигнал компенсации веса UY, поступающий на первый вход сумматора 8, и сигнал ДУСz, поступающий с формирователя ФY на второй вход сумматора Сум1, полученный сигнал UY2 с выхода Сум1 подается на вход Y рулевого привода (10). Сигнал UZ1 формирователя команд компенсации веса (3) подается на первый вход сумматора Сум2 (9), на второй вход Сум2 подается сигнал UZ1 с выхода формирователя ФZ (7) сигналов ДУСY (6). Сигнал с выхода Сум2 UZ2 поступает на вход Z РП (10).
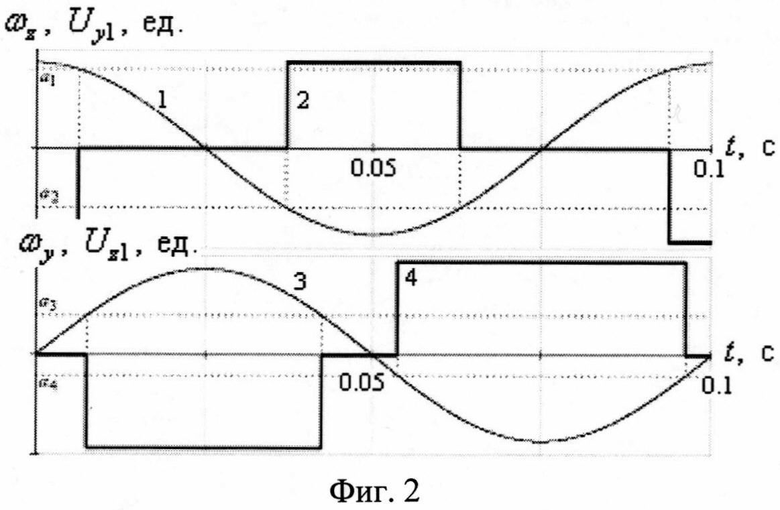
Формирование сигналов угловой скорости поясняет фиг. 2, где приведены сигналы с датчиков угловой скорости ωz (1) ДУСZ и ωy (3) ДУСY и формирование управляющих сигналов UZ1 (4) и UY1 (2) в соответствии с зависимостями (15, 16).
Величина пороговых значений по угловой скорости колебаний определяется исходя из необходимой степени демпфирования колебаний снаряда. Для стабилизации по угловой скорости (искусственного демпфирования колебаний) необходимы отрицательные обратные связи по угловой скорости ωz в канале Y и по угловой скорости ωy в канале Z, что и реализуется в способе.
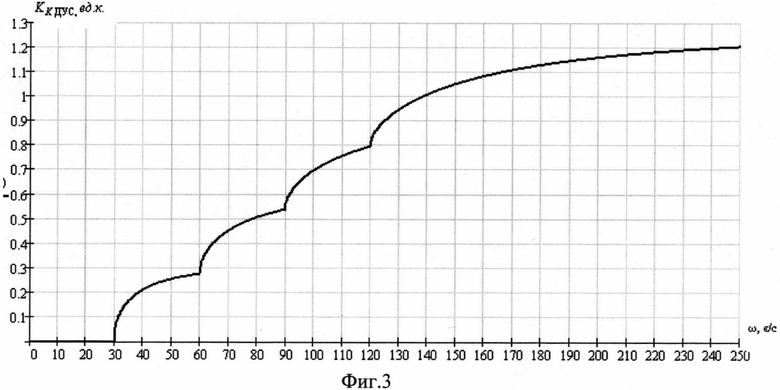
Команда демпфирования по угловой скорости в невращающейся по крену системе координат определяется в соответствии с зависимостью:
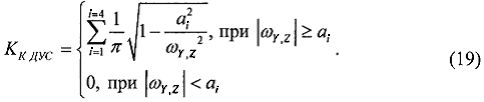
Таким образом, на величину демпфирующего сигнала влияют модули пороговых значений a i, независимо от их распределения по каналам. Однако с учетом того, что канал Y в большей степени используется для угловой стабилизации, целесообразно по мере увеличения величины ω подключать сначала канал Z, а затем канал Y. Например, если с точки зрения динамики системы оптимально, чтобы пороговые значения по модулю составляли 30, 60, 90 и 120°/с, то распределяют их следующим образом: а 1=120°/с, а 2=-90°/c; а 3=60°/c, a 4=-30°/c, тогда демпфирующий сигнал в канале Y (и, соответственно, необходимость его сложения с управляющим сигналом) будет возникать только при увеличении угловой скорости продольной оси снаряда до 90°/c.
Зависимость команды демпфирования, формируемой с ДУС в невращающейся по крену системе координат от величины угловой скорости снаряда ω при выбранных пороговых значениях угловой скорости колебаний, приведена на фиг. 3.
При необходимости уменьшения амплитуды колебаний уровень первого порогового значения сигнала ДУС может быть уменьшен (например, до 9°/c при допустимой амплитуде колебаний равной 1,0-1,5°). Преимуществом способа является относительная простота операций над сигналами (отсутствует сложение непрерывных величин).
Предложенный способ демпфирования колебаний позволяет обеспечить инерциальное наведение слабодемпфированного снаряда и, кроме того, может быть применен на баллистическом участке полета снаряда перед началом инерциального наведения.
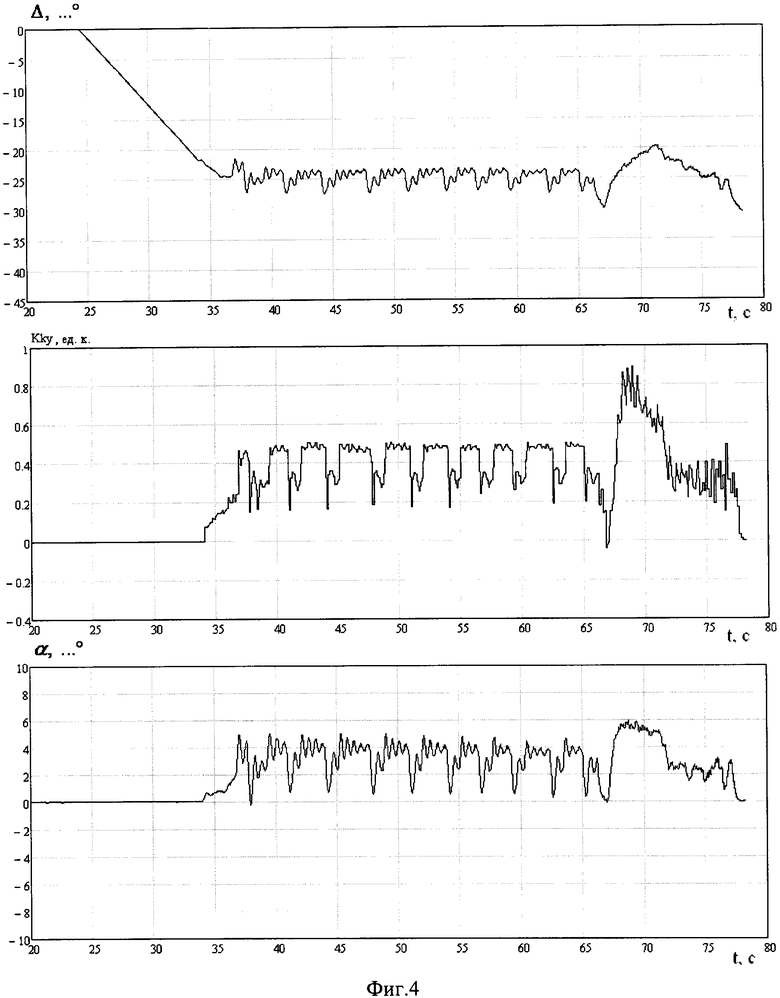
Процессы угловой стабилизации и демпфирования колебаний снаряда на участках инерциального наведения и баллистического полета перед началом инерциального наведения приведены на фиг. 4-6. На фиг. 4-6 обозначено:
Δ - пеленг ГК;
Кку - коэффициент команды в вертикальной плоскости;
α - угол атаки снаряда;
Кку дус - коэффициент команды в вертикальной плоскости, формируемый с ДУС на участках баллистического полета и инерциального наведения.
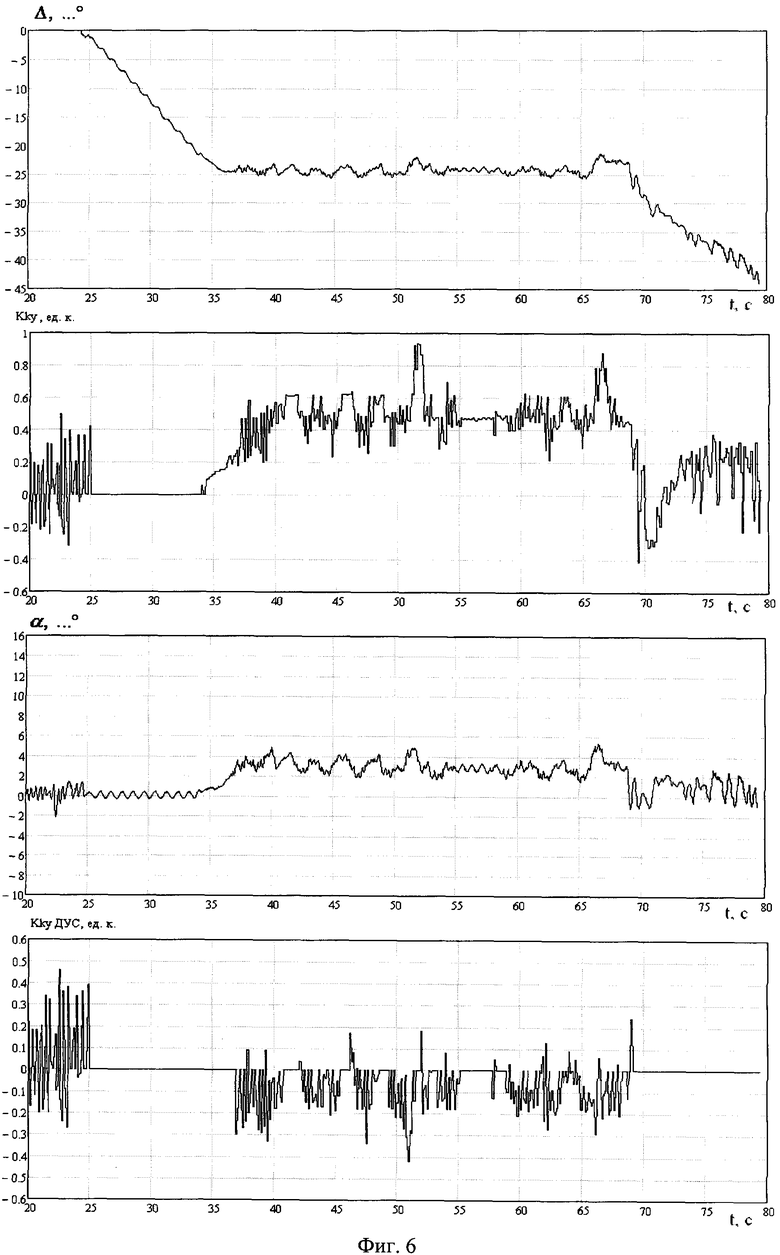
На фиг. 4 представлены процессы при отсутствии колебаний снаряда, сигналы демпфирования при этом не формируются. На фиг. 5 - процессы при возникновении колебаний снаряда по углам атаки и скольжения и отсутствии демпфирования колебаний снаряда. На фиг. 6 приведены процессы при демпфировании колебаний, приведенных на фиг. 5, сигналами ДУС в соответствии с предлагаемым алгоритмом. Разарретирование ГК на фиг. 4-6 производится на 24 с. С этого момента до достижения пеленга ГК порогового значения (36 с при отсутствии колебаний снаряда) происходит баллистический разворот снаряда, затем инерциальное наведение, при котором пеленг ГК должен стабилизоваться (фиг. 4) на пороговом уровне (24°), с 77 с начинается процесс самонаведения снаряда на цель. Однако при наличии колебаний снаряда на баллистическом участке в момент разарретирования ГК положение ГК может отличаться от расчетного на амплитуду колебаний снаряда, что приведет к изменению угла наклона траектории снаряда на участке инерциального наведения и невстреливанию снаряда в зону захвата гироскопической головкой самонаведения цели. Кроме того, на участке инерциального наведения отсутствие стабилизации снаряда по угловой скорости приводит (фиг. 5) к изменению с 50 с пеленга снаряда относительно расчетного значения. На фиг. 6 представлены процессы при введении в соответствии с предлагаемым алгоритмом сигналов демпфирования с ДУС, которое начинается после взведения рулей на 22 с. В результате функционирования системы демпфирования амплитуда колебаний снаряда на участке баллистического полета до начала инерциального наведения уменьшается с 4-6° до 1°, на участке инерциального наведения с 3° до 0,5°. На участке инерциального наведения происходит удержание пеленга снаряда на необходимом уровне при требуемом положении ГК в момент разарретирования и требуемом угле стабилизации снаряда. Коэффициент команды демпфирования в вертикальной плоскости Кку дус, формируемый с ДУС в соответствии с предлагаемым алгоритмом, приведен на фиг. 6.
Таким образом, предлагаемый способ инерциального наведения обеспечивает удержание требуемого углового положения снаряда при требуемой амплитуде колебаний снаряда по углам атаки и скольжения на участках инерциального наведения и баллистического полета снаряда.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ПРОДОЛЬНОЙ ОСИ ВРАЩАЮЩЕГОСЯ ПО КРЕНУ АРТИЛЛЕРИЙСКОГО УПРАВЛЯЕМОГО СНАРЯДА | 2008 |
|
RU2401981C2 |
| Способ вывода вращающейся по углу крена ракеты с гироскопом направления в зону захвата цели головкой самонаведения и система для его осуществления | 2017 |
|
RU2659622C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛА КРЕНА БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ ВРАЩАЮЩЕГОСЯ ПО КРЕНУ АРТИЛЛЕРИЙСКОГО СНАРЯДА | 2015 |
|
RU2584400C1 |
| Двухосная стабилизация изображения на подвижном основании без ограничения углов прокачки | 2023 |
|
RU2833345C1 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
| ЭЛЕКТРОННЫЙ БЛОК ДВУХКАНАЛЬНОЙ ЛАЗЕРНОЙ ПОЛУАКТИВНОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ | 2011 |
|
RU2478909C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА | 2001 |
|
RU2217692C2 |
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМОГО СНАРЯДА И ГИРОСКОПИЧЕСКИЙ ПРИБОР | 2001 |
|
RU2210727C2 |
| СПОСОБ ВЫВОДА ДАЛЬНОБОЙНОЙ РАКЕТЫ В ЗОНУ ЗАХВАТА ЦЕЛИ ГОЛОВКОЙ САМОНАВЕДЕНИЯ И СИСТЕМА НАВЕДЕНИЯ ДАЛЬНОБОЙНОЙ РАКЕТЫ | 2015 |
|
RU2583347C1 |
| СПОСОБ ФОРМИРОВАНИЯ СИГНАЛОВ СТАБИЛИЗАЦИИ И САМОНАВЕДЕНИЯ ПОДВИЖНОГО НОСИТЕЛЯ И БОРТОВАЯ СИСТЕМА САМОНАВЕДЕНИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2303229C1 |

Изобретение относится к способам наведения вращающегося по крену снаряда. Для инерциального наведения вращающегося по крену снаряда измеряют рассогласование между положением продольной оси снаряда и положением оси инерциального гироскопа, измеряют угловые скорости снаряда в связанной со снарядом вращающейся по крену системе координат относительно двух взаимно ортогональных поперечных осей снаряда, формируют сигнал управления рулевым приводом при превышении порогового значения рассогласования. Формируют дополнительные сигналы управления по угловой скорости на баллистическом участке траектории до начала инерциального наведения при превышении угловой скорости снаряда пороговых значений, определенных из условия обеспечения требуемой амплитуды колебания снаряда по углам атаки и скольжения. Обеспечивается угловая стабилизация снаряда. 2 з.п. ф-лы, 6 ил.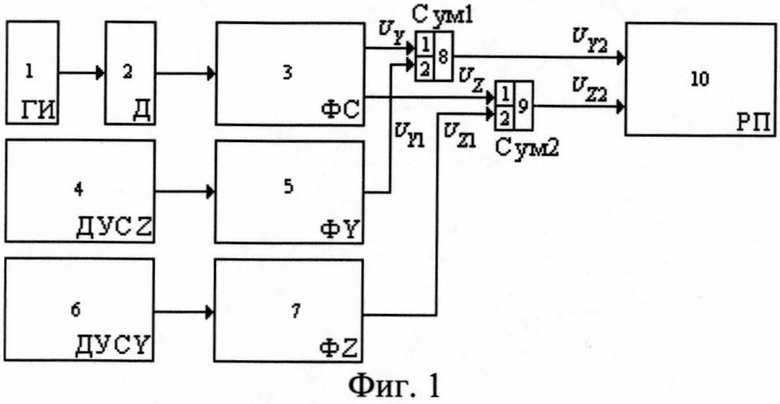
1. Способ инерциального наведения вращающегося по крену снаряда, включающий измерение датчиком угла инерциального гироскопа рассогласования между положением продольной оси снаряда и положением оси гироскопа инерциального, формирование сигналов управления рулевым приводом при превышении указанного рассогласования пороговых значений, отличающийся тем, что измеряют угловые скорости снаряда в связанной со снарядом вращающейся по крену системе координат относительно двух взаимно ортогональных поперечных осей снаряда и формируют дополнительные сигналы управления при превышении угловой скорости снаряда пороговых значений.
2. Способ по п. 1, отличающийся тем, что дополнительные сигналы управления с датчиков угловых скоростей формируют на баллистическом участке траектории до начала инерциального наведения.
3. Способ по п. 1, отличающийся тем, что величина пороговых значений по угловой скорости определяется из условия обеспечения требуемой амплитуды колебаний снаряда по углам атаки и скольжения.
| СПОСОБ СТАБИЛИЗАЦИИ УГЛОВОГО ПОЛОЖЕНИЯ ПРОДОЛЬНОЙ ОСИ ВРАЩАЮЩЕГОСЯ ПО КРЕНУ АРТИЛЛЕРИЙСКОГО УПРАВЛЯЕМОГО СНАРЯДА | 2008 |
|
RU2401981C2 |
| CN 103869097 A, 18.06.2014 | |||
| US 5375792 A1, 27.12.1994 | |||
| ГИРОСКОПИЧЕСКОЕ СЛЕДЯЩЕЕ ЗА ЦЕЛЬЮ УСТРОЙСТВО САМОНАВОДЯЩЕЙСЯ ВРАЩАЮЩЕЙСЯ ВОКРУГ ПРОДОЛЬНОЙ ОСИ РАКЕТЫ | 2009 |
|
RU2397435C1 |
| СПОСОБ СТАБИЛИЗАЦИИ ПО КРЕНУ ИНЕРЦИАЛЬНОЙ ПЛАТФОРМЫ ДЛЯ БЫСТРОВРАЩАЮЩИХСЯ ОБЪЕКТОВ И СТАБИЛИЗИРОВАННАЯ ПО КРЕНУ ИНЕРЦИАЛЬНАЯ ПЛАТФОРМА | 2003 |
|
RU2256882C2 |

