Изобретение относится к области систем ориентации летательных аппаратов (ЛА), преимущественно беспилотных самолетного типа и управляемых снарядов.
Для малогабаритных объектов с невысокой стоимостью требуется компактная дешевая навигационная система работоспособная в ночное время и в условиях плохой видимости, в том числе и в режиме чисто инерциального наведения.
Известен способ определения ориентации подвижного объекта, использующий аппаратуру спутниковой навигации [1] - Патент РФ №2273826, МПК G01С 21/24, G01S 5/02, 2004 г. «Способ определения углов ориентации подвижного объекта и устройство для его осуществления». Этот способ характеризуется тем, что аппаратура спутниковой навигации содержит одно антенное устройство, используются три гироинтегратора, размещенных на осях связанной с объектом системы координат, используется бортовой вычислитель, в котором реализован алгоритм определения ориентации подвижного объекта, основанный на определении элементов матрицы перехода между начальной стартовой (земной нормальной - ЗНСК) и связанной (ССК) с объектом системами координат (определение систем координат в соответствии с [2] – «Динамика летательных аппаратов в атмосфере. Термины, определения и обозначения», ГОСТ 20058-80). Используется следующий порядок действий: аппаратура спутниковой навигации (АСН) и три гироинтегратора одновременно определяют значения проекций вектора скорости: АСН - в стартовой, а гироинтеграторы - в связанной с объектом системах координат соответственно. Определенные значения проекций скорости передаются в вычислитель, который, используя полученную информацию, определяет значения углов ориентации объекта в пространстве по алгоритму определения ориентации подвижного объекта. Этот алгоритм основан на уравнениях связи между ЗНСК и ССК.
Данный способ обладает следующими недостатками:
- из-за наличия ненулей в гироинтеграторах накапливаются ошибки, соответственно, в правых частях предложенной к решению системы уравнений параметры со временем все более отличаются от истинных значений, соответствующих текущему моменту;
- предложенный алгоритм представляет собой подход к решению обратной задачи кинематики [3, стр. 14, 15, 54-85], по своей сути неоднозначной, поэтому при перерыве в получении координат от аппаратуры спутниковой навигации, восстановление правильного решения задачи не всегда обеспечивается.
Альтернативного способа формирования углов ориентации в указанном техническом решении не приводится.
Известен также способ [4] - Патент РФ №2258907, МПК G01С 19/44, 2002 г. «Способ и устройство построения невозмущаемой безгироскопной вертикали». Этот способ включает в себя измерения текущих углов отклонения осей связанной системы координат от плоскости местного горизонта (вертикали) - тангажа и крена с помощью физического маятника, выполненного в виде двухосного подвеса. Указанные углы отклонения маятника имеют возмущения, вызванные линейными ускорениями объекта. Формирование оценок вышеупомянутых возмущающих линейных ускорений (их северной и восточной составляющих соответственно) осуществляют по данным спутникового навигационного приемника путем численного дифференцирования соответствующих скоростей или способом наименьших квадратов. Пересчитывают эти составляющие ускорений в проекции на продольную и вертикальную оси связанной системы координат с использованием курса от системы курсоуказания объекта и вводят непрерывно или дискретно коррекцию в возмущенные этими ускорениями измерения физического маятника. Этим достигают построения невозмущенной вертикали (углов тангажа и крена). При этом используют для тангажа и крена расчетные зависимости (обозначения даны в соответствии с [4]):
для тангажа
для крена.
В качестве курсоуказателя (п. 3 формулы изобретения [4]) предлагается использовать трехосный магнитометр (феррозонд).
Недостатком этого способа является недостаточная точность определения углов ориентации в процессе выполнения маневра по направлению и/или скорости из-за неучета вертикальной составляющей ускорения и тем более в случае прекращения выдачи информации от спутниковой (радионавигационной) подсистемы.
Известно применение для определения углов ориентации бесплатформенных навигационных систем [5, стр. 20-24, рис. 2.1, 2.3] - Антонец Е.В., Кочергин В.И., Федосеева Г.А. «Приборное оборудование воздушных судов и его летная эксплуатация». Учебное пособие, г. Ульяновск, УВАУ ГА, 2014 г.
В этом способе для формирования углов ориентации измеряют угловые
скорости в ССК объекта и пересчитывают их по уравнениям Эйлера-Крылова в угловые скорости изменения углов ориентации [5, стр. 10, формула (1.2)], интегрируют их. При этом используют полученные углы тангажа и крена при расчетах угловых скоростей изменения курса, тангажа и крена. Для периодической корректировки каналов тангажа и крена переводят летательный аппарат в горизонтальный полет с постоянной скоростью, измеряют показания акселерометров, установленных на ЛА, и определяют по ним углы тангажа и крена. Разность между углами, определенными с помощью акселерометров, и углами, определенными интегрированием, используют как поправку к сигналам соответствующих углов ориентации, полученных интегрированием, на очередном периоде работы. Недостатком данного способа является то, что поправку по курсу так получить нельзя. Кроме того, для беспилотного ЛА в процессе вывода в режим тестового движения нельзя только по показаниям акселерометров определить, является ли полет горизонтальным без ускорения, или имеют место и наклон, и ускорение.
Известен также способ определения угловой ориентации объекта [6] - Патент РФ №2276384, МПК G01S 5/00, 2004 г. «Способ определения угловой ориентации объекта». Он основан на приеме сигналов от космических аппаратов глобальных навигационных спутниковых систем на разнесенные антенны количеством не менее трех, расположенные на объекте так, чтобы они не лежали на одной прямой. При этом антенны принимают сигналы от спутников, на основе которых определяются координаты спутников и разности фаз несущей частоты сигналов, принимаемых от спутников на разнесенные антенны. В разностях фаз содержится информация об углах между направлениями на спутники и векторами, образованными антеннами. На основе знания разностей фаз с привлечением информации о расположении антенн относительно объекта, о координатах объекта и о координатах спутников решается задача ориентации. При этом антенны принимают сигналы только от двух спутников (а не от трех и более), а информацию о координатах объекта получают от инерциальной навигационной системы или используют информацию о координатах точки старта. Навигационная система, реализующая такой способ, не может быть размещена на малогабаритном объекте (расстояние между антеннами должно превышать длину волны, на которой ведется передача сигналов со спутников), а необходимость обработки сигналов одновременно с нескольких антенн существенно увеличивает стоимость системы.
Известен способ [13] - Егорушкин А.Ю., Мкртчян В.И. «Коррекция углов ориентации в бесплатформенных инерциальных навигационных системах». Инженерный журнал: наука и инновации, 2017 г., вып. 8. http://dx.doi.org/10.18698/2308-6033-2017-8-1664. В этом способе (метод 1) для первоначальной оценки углов ориентации рассматривают движение объекта над эллипсоидом Земли и измеряют в ССК кажущиеся линейные ускорения и угловые скорости. Используя измеренные значения, формируют матрицу направляющих косинусов, связывающую ССК и ЗНСК. Так как значения направляющих косинусов выражаются через тригонометрические функции углов ориентации [7, стр. 126, формула 3.26], имеется возможность путем решения соответствующих тригонометрических уравнений определить углы. При этом требуется исключить неоднозначность решений, т.к. в девяти возможных уравнениях имеется только три неизвестных. Для исключения неоднозначности по углу курса полагается, что угол поворота траектории, формируемый на основании измерений линейных скоростей с помощью спутниковой (радионавигационной) системы, соответствует углу курса. По рассогласованиям в ЗНСК между показаниями линейной скорости от радионавигационной системы и линейными скоростями, полученными интегрированием сигналов акселерометров, для повышения точности счисления углов тангажа и крена находят дрейфы ДУС в проекциях на оси ЗНСК. Пересчитывают их в ССК, используя транспонированную матрицу направляющих косинусов, и используют полученные значения для коррекции текущих показаний ДУС. Процесс требует обязательного измерения линейных ускорений, имеет длительный итерационный характер, проблема полной компенсации дрейфов ДУС не решена.
По мнению заявителя, в качестве прототипа заявляемых способов определения значений углов ориентации (курса, тангажа, крена) в процессе движения летательного аппарата на базе информации, формируемой радионавигационной частью его интегрированной навигационной системы может рассматриваться способ, описанный в [7, стр. 248, рис. 5.30] - Матвеев В.В., Распопов В.Я. «Основы построения бесплатформенных инерциальных навигационных систем» - СПб, ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009 г.
Данный способ характеризуется тем, что радионавигационная (спутниковая) система формирует в ЗНСК координаты объекта, на котором она расположена, и проекции его линейной скорости на оси ЗНСК. Определения углов ориентации объекта данный способ не предусматривает.
Задача заключается в автоматизации обеспечения устойчивого полета летательного аппарата.
Эта комплексная задача распадается на несколько подзадач, связанных общим замыслом:
- автоматическое (при необходимости автоматизированное) нахождение оценок углов курса, тангажа, крена, не имеющих неограниченно нарастающей со временем погрешности (по модулю), не превышающей 5-10° (2×СКО), без привлечения в состав бортовой интегрированной навигационной системы дополнительных измерительных устройств (помимо радионавигационной подсистемы, гиродатчиков угловой скорости (ДУС) и вычислителя);
- автоматическое (при необходимости автоматизированное) определение необходимых поправок ко всем трем углам ориентации, рассчитываемым на основании измерений показаний (в ССК ЛА) гиродатчиков угловых скоростей, и их использование.
Техническими результатами являются:
- возможность формирования соответственно углов курса, тангажа и крена в радионавигационном режиме работы интегрированной навигационной системы с погрешностями (не более 2-3° по модулю), обеспечивающими устойчивый полет ЛА;
- повышение точности задания начальных условий при перезапуске расчета углов курса, тангажа и крена в инерциальном режиме работы навигационной системы (НС) за счет проведения коррекции и, как следствие, повышение длительности нахождения ЛА в этом режиме (до достижения погрешностей счисления углов ориентации 10° по модулю) без снижения вероятности выполнения полетного задания.
Предлагаемые способы определения значений углов ориентации в процессе движения летательного аппарата на базе информации, формируемой радионавигационной частью его навигационной системы, позволяют получить новое качественное отличие, отсутствующее в прототипе - определение не только координат и линейных скоростей, но и углов ориентации с точностью достаточной для проведения корректировки инерциальной компоненты интегрированной навигационной системы. При этом не требуется расширения аппаратурного состава навигационной системы.
Технический результат в виде возможности определения угла курса достигается за счет того, что в способе определения значения угла курса в процессе движения летательного аппарата на базе информации, формируемой радионавигационной частью его навигационной системы, формируют значения высоты и проекций скорости объекта на три оси земной нормальной системы координат (в соответствии с [2] ось O0Yg ЗНСК направлена вверх по местной вертикали, поэтому в дальнейшем именуем её вертикальной), в которой счисляется траектория летательного аппарата. Определяют угол поворота траектории исходя из значений продольной и поперечной проекций линейных скоростей. Находят абсолютное значение линейной скорости. По высоте, абсолютной скорости, а также углам отклонения соответствующих управляющих поверхностей, с учетом соответствующих аэродинамических характеристик объекта, формируют угол скольжения. Угол курса объекта вычисляют, прибавляя к полученному значению угла поворота траектории угол скольжения.
Технический результат в виде возможности определения угла тангажа достигается за счет того, что в способе определения значения угла тангажа в процессе движения летательного аппарата на базе информации, формируемой радионавигационной частью его навигационной системы, формируют значения высоты и проекций скорости объекта на вертикальную, продольную и поперечную оси земной нормальной системы координат, в которой счисляется траектория летательного аппарата. Определяют по значениям проекций скорости объекта на продольную и поперечную оси ЗНСК модуль горизонтальной составляющей скорости. Находят значение угла наклона траектории. Определяют абсолютную величину линейной скорости. По высоте, абсолютной величине скорости, а также углам отклонения соответствующих управляющих поверхностей, с учетом соответствующих аэродинамических характеристик объекта, формируют его угол атаки. Получают угол тангажа объекта, прибавляя к полученному значению угла наклона траектории значение угла атаки.
Технический результат в виде возможности определения угла крена
достигается, когда в способе определения значения угла крена в процессе движения летательного аппарата на базе информации, формируемой радионавигационной частью его навигационной системы, формируют значения проекций скорости объекта на вертикальную, продольную и поперечную оси земной нормальной системы координат, в которой счисляется траектория летательного аппарата. Периодически формируют импульсное управляющее воздействие для перемещения ЛА в направлении «вертикальной» или поперечной осей связанной системы координат ЛА (термин «вертикальная» взят в кавычки, т.к. эта ось ССК является истинно вертикальной, лишь когда находится в положении параллельном (антипараллельном) оси O0Yg ЗНСК, т.е. когда продольная и поперечная оси ССК ЛА одновременно лежат в горизонтальной плоскости, в [2] она именуется нормальной и определяется как направленная к верхней части ЛА). На интервалах движения ЛА под воздействием управляющего воздействия определяют значения производных от проекций скоростей объекта на оси ЗНСК и сглаживают их. Используя углы курса и тангажа, находят проекции ускорений на «вертикальную» и поперечную оси полусвязанной СК ЛА. А угол крена определяют исходя из того, что проекция ускорения объекта на ось полусвязанной системы координат (ПССК), в направлении одноименной оси, с которой прикладывалось управляющее воздействие, является по отношению к углу крена прилежащим, а другая из указанных проекций ускорения в ПССК объекта - противолежащим катетом прямоугольного треугольника.
Технический результат в виде возможности определения угла крена достигается и тогда, когда (вариант 2) необходимые для пересчета проекций ускорений из ЗНСК в ПССК углы курса и тангажа вычисляют по высоте и проекциям линейной скорости объекта в ЗНСК с учетом положения управляющих поверхностей ЛА.
В необходимых случаях сигналы до или после обработки, а также на промежуточных этапах вычислений могут сглаживаться. Для заявляемых способов место, занимаемое в цепи операций и алгоритмы, реализуемые при осуществлении сглаживания, не имеют существенного значения. Поэтому в дальнейшем при описании (кроме особых случаев) о такого рода действиях не упоминается.
Заявляемые способы определения значений углов курса и тангажа основываются на том, что устойчивый летательный аппарат в процессе движения стремится занять такое положение, чтобы его продольная ось в имеющих место условиях полета, по возможности, приблизилась к направлению вектора скорости движения ЛА [8, стр. 124-126]. Направление вектора скорости ЛА в ЗНСК, в свою очередь, определяется углом поворота траектории (отворот в горизонтальной плоскости от продольной оси ЗНСК) и углом наклона траектории (отворот от горизонтальной плоскости после поворота системы координат на угол поворота траектории) [9, стр. 97, рис. 2.9]. Таким образом, для определения угла поворота траектории достаточно знать проекции скорости ЛА на продольную и поперечную оси ЗНСК. Так как оси ЗНСК ортогональны, проекции скорости на продольную и поперечную оси ЗНСК можно рассматривать как катеты прямоугольного треугольника. Причем, для угла поворота траектории проекцию скорости ЛА на продольную ось ЗНСК можно рассматривать как прилежащий катет.
Также по этим двум проекциям (например, по теореме Пифагора) может быть определена горизонтальная составляющая вектора скорости. В свою очередь, по горизонтальной и вертикальной составляющим вектора скорости в ЗНСК определяют значение угла наклона траектории. Причем, по отношению к углу наклона траектории в качестве противолежащего катета, можно рассматривать проекцию скорости ЛА на вертикальную ось ЗНСК.
В процессе движения ЛА, когда скорость не равна нулю, измерение всех трех проекций скорости ЛА на оси ЗНСК обеспечивает радионавигационная часть интегрированной навигационной системы (радионавигационная система - РНС). Таким образом, исходя из тригонометрических соотношений, углы поворота и наклона траектории движения ЛА могут быть определены по информации, поступающей от радионавигационной части навигационной системы.
Как уже отмечалось, отклонение продольной оси ЛА от направления вектора скорости мало (обычно в среднем не больше 5° по модулю). Углы курса и тангажа отсчитываются от продольной оси летательного аппарата. С приемлемой для обеспечения устойчивого полета точностью можно принять, что угол курса равен углу поворота траектории [13], а угол тангажа - углу наклона траектории. Более точно их значения можно определить, если учесть, что угол курса равен сумме угла поворота траектории и угла скольжения [9, стр. 439, формула (10.36д)], а угол тангажа равен сумме угла наклона траектории и угла атаки [9, стр. 431, формула(10.6)]. На летательном аппарате углы скольжения и атаки могут определяться различными способами, в том числе и без привлечения навигационных данных, например по показаниям датчиков воздушной скорости [10].
Радионавигационная система измеряет не только скорости, но и координаты объекта, в частности его высоту (вертикальная ось ЗНСК). Высота определяет плотность воздуха, в котором движется летательный аппарат и изменение температуры относительно точки старта (см., например, [17]- ГОСТ 4401-81. Атмосфера стандартная. Параметры). В [9, стр. 141-144, формула (2.124в), стр. 358, формулы (8.51)-(8.54)] показано, что при известных аэродинамических характеристиках объекта по высоте, скорости и значениях углов отклонения рулевых поверхностей может быть осуществлена оценка значений углов скольжения и атаки. Знаки углов скольжения и атаки определяются в соответствии с траекторией полета [9, стр. 51, рис. 1.20, стр. 42, рис. 1.16]. Таким образом, по информации от радионавигационной системы и вычислителя ЛА (в части положения его органов управления) могут быть определены углы поворота траектории и скольжения, углы наклона траектории и атаки, а, следовательно, углы курса и тангажа.
Для определения угла крена движение летательного аппарата подвергается тестовому возмущению за счет имеющихся на ЛА органов управления (аэродинамических рулей, отстреливаемых масс, газоструйных рулей и т.п.). Воздействие направлено перпендикулярно продольной оси (по возможности) и носит кратковременный (импульсный) характер (по истечении заданного времени снимается). На время подачи тестового возмущения управление полетом прерывается. В направлении перпендикулярном как продольной оси, так и направлению воздействия движение ЛА будет минимальным.
При малых углах крена предпочтительно задавать возмущение вдоль «вертикальной» оси ССК объекта, чтобы тестовое движение не приближало ЛА к поверхности Земли. В процессе тестового перемещения радионавигационная система продолжает определять скорости перемещения ЛА в проекциях на оси ЗНСК. Значения этих скоростей определяются ускорениями на соответствующем интервале времени. Ускорения определяют следующим образом. Берут проекции скоростей на оси ЗНСК, сформированные радионавигационной системой, и находят их производные. Полученное значение производной, соответствующее вертикальному направлению ЗНСК, корректируют на величину ускорения силы тяжести. Полученные для трех осей ЗНСК скорректированные проекции значений ускорения сглаживают, чтобы убрать шумы, в том числе и вызванные дифференцированием. Так получают оценки для ускорений в ЗНСК, которые имели бы место при отсутствии силы тяжести.
Полученные оценки пересчитывают в полусвязанную СК (ПССК), повернутую относительно ЗНСК последовательно на углы курса и тангажа, используя, например, матрицу перехода (она может быть, в частности, получена из [7, стр. 126, формула (3.26)] приравниванием третьего угла нулю):

где Т - символ транспонирования;
ψ - угол курса;
ϑ - угол тангажа.
Полагая, что полученные поперечные ускорения 
 в ПССК обусловлены только тестовым воздействием, вызвавшим смещение ЛА, которое было направлено, например, вдоль оси Y ССК, и учитывая, что ПССК отличается от ССК только поворотом на угол крена, можно записать:
в ПССК обусловлены только тестовым воздействием, вызвавшим смещение ЛА, которое было направлено, например, вдоль оси Y ССК, и учитывая, что ПССК отличается от ССК только поворотом на угол крена, можно записать:


где  - ускорение вдоль оси Y ССК, вызванное тестовым воздействием в направлении этой оси;
- ускорение вдоль оси Y ССК, вызванное тестовым воздействием в направлении этой оси;
γРНС - угол крена, рассчитываемый по информации, получаемой от радионавигационной части навигационной системы.
При известном направлении (знаке) тестового воздействия угол γРНС может быть однозначно определен в диапазоне от 0 до 360°. При этом само
значение ускорения  знать не нужно [14].
знать не нужно [14].
По аналогии можно утверждать, что угол крена может быть рассчитан и при тестовом воздействии с ускорением  вдоль оси Z ССК, а также в общем случае тестового воздействия в плоскости XY ССК при известной ориентации направления этого воздействия.
вдоль оси Z ССК, а также в общем случае тестового воздействия в плоскости XY ССК при известной ориентации направления этого воздействия.
Таким образом, по информации, сформированной на основании измерений радионавигационной части навигационной системы, определяются все три угла ориентации. При расчете этих углов используют только тригонометрические соотношения, поэтому систематическое нарастание (по модулю) ошибки определения углов ориентации отсутствует.
Тем самым подтверждается достижение технического результата - возможности формирования соответственно углов курса, тангажа и крена в радионавигационном режиме работы навигационной системы движущегося летательного аппарата. Как видно из приведенного выше, все необходимые расчеты и измерения могут быть осуществлены автоматически без вмешательства человека.
Известны интегрированные навигационные системы [11, стр. 643-649] - «ГЛОНАСС. Принципы построения и функционирования». Справочное пособие. Изд. 4-е, перераб. и доп., под ред. Перова А.И. и Харисова В.Н., М., «Радиотехника», 2010 г. В этих навигационных системах имеется радионавигационная часть и инерциально-навигационная часть. Инерциальная часть содержит акселерометры и гироскопы (датчики угловой скорости). Счисление углов ориентации объекта, где установлена навигационная система, осуществляется интегрированием угловых скоростей, полученных путем пересчета значений, измеренных ДУС, в систему координат, в которой определяются углы ориентации. Как уже отмечалось, при таком способе определения углов ориентации ошибки непрерывно увеличиваются из-за наличия в сигналах ДУС неучтенных значений ненулей. Корректировка в процессе движения не выполняется (предусмотрена только компенсация инструментальных ошибок, измеряемых в заводских или предполетных условиях).
Известна также интегрированная навигационная система [12, стр. 122-126, рис. 4.11]-«Управление и наведение беспилотных маневренных летательных аппаратов на основе современных информационных технологий», под ред. Красилыцикова М.Н. и Себрякова Г.Г., М., ФИЗМАТЛИТ, 2003 г. Эта система содержит радионавигационную (предусилитель и подканалы сопровождения кода и несущей частоты) и инерциальную (датчики угловой скорости и линейных ускорений) составные части. Определение положения, скорости и угловой ориентации осуществляется путем совместной обработки сигналов от обеих частей в расширенном фильтре Калмана. Фильтр Калмана имеет высокий (больше 17-го) порядок (требуется мощный вычислитель). В его основе лежит линеаризованная модель ошибок. Непосредственное определение углов ориентации по результатам обработки измерений только радионавигационной части невозможно. Для получения ошибок ориентации необходимо использовать не только измерения ДУС, но и акселерометров, т.е. аппаратурный состав не минимизирован.
Известна интегрированная система ориентации и навигации [15, стр. 15-16, рис. 1.1.1] - Емельянцев Г.И., Степанов А.П. «Интегрированные инерциально-спутниковые системы ориентации и навигации» под общ. ред. Пошехонова В.Г., СПб, ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2016 г. В этой системе возможны три режима работы:
- чисто радионавигационный (спутниковый), когда вырабатываются только координаты местоположения и проекции линейной скорости;
- чисто инерциальный, когда вырабатываются углы ориентации
(прямым замером с помощью позиционных гироскопов или интегрированием угловых скоростей, перепроецированных в СК, в которой счисляются координаты местоположения) и навигационные координаты и линейные скорости путем интегрирования показаний акселерометров с учетом углов ориентации;
- интегрированный, когда координаты местоположения, линейные скорости и углы ориентации рассчитываются с учетом информационной избыточности.
В интегрированном режиме работы можно скомпенсировать ненули акселерометров и посредством этого уточнить корректирующие поправки для углов ориентации.
По мнению заявителя наиболее близким к способу коррекции в процессе движения летательного аппарата углов ориентации, формируемых инерциальной частью навигационной системы, на базе информации, формируемой радионавигационной частью его навигационной системы, является описанный в [16, стр. 45, 48-49, рис. 1.12] - Анучин О.Н., Емельянцев Г.И. «Интегрированные системы ориентации и навигации для морских подвижных объектов» под общ. ред. Пошехонова В.Г., СПб, ГНЦ РФ ЦНИИ «Электроприбор», 1999 г. Этот способ характеризуется тем, что на объекте устанавливают не менее трех гиродатчиков угловых скоростей и аппаратуру потребителя спутниковой радионавигационной системы. С помощью радионавигационной части навигационной системы определяют местоположение и проекции линейной скорости на оси СК, в которой счисляется местоположение объекта. Показания ДУС пересчитывают в углы ориентации. В результате интегрированная навигационная система имеет на выходе значения координат, линейных скоростей и углов ориентации объекта. Из-за наличия нескомпенсированных ненулей в процессе движения, погрешность определения углов ориентации накапливается. Если в качестве объекта установки навигационной системы рассматривать летательный аппарат, он со временем (при средней величине ненулей порядка 0,01% - за 15-20 мин) потеряет устойчивость.
Задача заключается в автоматизации обеспечения устойчивого полета летательного аппарата.
Техническим результатом является обеспечение возможности сохранять точность определения углов ориентации не хуже 5-10° (по модулю) независимо от времени нахождения в полете без расширения аппаратурного состава навигационной системы.
Указанный технический результат достигается в предлагаемом способе коррекции значений углов ориентации за счет того, что:
- с помощью инерциальной части навигационной системы определяют угловые скорости объекта в связанной СК;
- с помощью ее радионавигационной части находят его высоту и проекции линейной скорости на оси ЗНСК, в которой счисляется движение ЛА;
- рассчитывают, исходя из проекций угловых скоростей объекта на оси ССК, углы его ориентации;
- определяют углы курса и тангажа на основе знания проекций линейных скоростей на оси ЗНСК, высоты объекта и положения управляющих поверхностей ЛА, а с привлечением информации об ускорениях в процессе выполнения тестового маневра при импульсном воздействии - также и угол крена;
- используют полученные на базе информации от радионавигационной части навигационной системы углы ориентации в качестве опорных значений для расчета корректирующих величин углов ориентации, рассчитываемых на основании угловых скоростей, измеренных в ССК.
Указанный технический результат достигается и в том случае, когда
для получения углов ориентации инерциальной частью навигационной системы используют интегрирование перепроецированных угловых скоростей из ССК в ЗНСК, например, по формулам Эйлера-Крылова (см. [7, стр. 128, формула (3.30)]). При этом для коррекции углов ориентации могут быть заменены начальные условия на соответствующие текущим значениям углов ориентации, полученным на основе данных от радионавигационной части.
Указанный технический результат достигается и тогда, когда по накопившейся на известном интервале времени разности в соответствующих углах ориентации для осуществления коррекции углов ориентации определяют поправки к скоростям изменения углов ориентации как частное от деления разности углов на продолжительность соответствующего интервала.
На фиг. 1 схематично, в качестве примера для варианта коррекции, когда углы ориентации по данным инерциальной части навигационной системы получают интегрированием скоростей их изменения, приведена соответствующая последовательность проводимых операций. Операции 1-4 отражают вычисление углов ориентации радионавигационной частью навигационной системы. Операции 5-7 показывают как определяются углы ориентации по угловым скоростям, измеренным ДУС. Обратная связь между этапами 7 и 6 показывает, что при преобразованиях угловых скоростей из ССК в ЗНСК учитываются углы тангажа и крена. Связи от этапов 3 и 4 к этапу 7 указывают на введение новых начальных условий для интегрирования при проведении коррекции по соответствующему углу ориентации. Операции расчета углов поворота и наклона траектории на фиг. 1 не отражены в связи с их очевидностью.
Работа предлагаемого способа осуществляется следующим порядком.
При предполетной подготовке измеряют углы ориентации объекта и
используют их в качестве начальных условий для расчета углов ориентации по показаниям ДУС. На начальном участке полета на входы обратной связи контуров стабилизации углов ориентации ЛА подаются нулевые или сформированные на основе измерений ДУС сигналы (например, на фиг. 1 полученные в результате операций 5-7). Как только переменная составляющая линейной скорости полета, определяемая по информации от радионавигационной части навигационной системы, станет меньше 15% (по модулю) от ее осредненной абсолютной величины на интервале времени 2-3 с, по определенным ею проекциям линейной скорости (операция 1 на фиг. 1) на оси ЗНСК находятся углы поворота и наклона траектории. В первом приближении они равны соответственно углам курса и тангажа. По достижении безопасной высоты на органы управления ЛА подается импульсный тестовый сигнал для определения угла крена (операция 4 на фиг. 1). По завершении тестового маневра ЛА, в соответствии с полетным заданием, возвращается на заданную траекторию или направление полета (к назначенной точке). Для уточнения расчетов углы курса и тангажа могут быть сформированы соответственно как суммы углов поворота траектории и скольжения и углов наклона траектории и атаки (операция 3 на фиг. 1). При этом в частности, значения углов скольжения и атаки (операция 2 на фиг. 1) могут быть сформированы на основе измеренной радионавигационной частью навигационной системы высоты (операция 1 на фиг. 1) и абсолютного значения скорости, получаемого из известных ее проекций на оси ЗНСК.
Так как известны значения углов ориентации, полученные по результатам измерений как инерциальной, так и радионавигационной частей навигационной системы, их одноименные разности могут (в простейшем случае) быть использованы для коррекции на очередном временном интервале измерений результатов определения углов ориентации
инерциальной частью навигационной системы. Процесс коррекции может периодически повторяться, причем для каждого канала темп может быть индивидуальным.
Как уже отмечалось, могут быть определены не только поправки к самим углам ориентации, но и к скоростям их изменения. По известным углам ориентации поправки к скоростям изменения углов ориентации могут быть однозначно пересчитаны в значения ненулей ДУС [7, стр. 127, формула (3.29)], что в ряде случаев удобнее для построения решаемой системы уравнений.
Если углы ориентации в инерциальной части навигационной системы получают путем интегрирования скоростей их изменения, их коррекция может быть осуществлена (фиг. 1) изменением начальных условий в соответствующем интеграторе на момент ее проведения. При этом определенные РНС значения углов курса и тангажа (операция 3), а также угла крена (операция 4) устанавливаются как начальные условия (операция 7) соответственно в интеграторах углов курса, тангажа и крена инерциальной части.
Возможны и другие комбинации описанных приемов.
Из описанного следует, что коррекция углов ориентации, сформированных по данным инерциальной части навигационной системы движущегося летательного аппарата, может быть автоматически осуществлена на основании информации, получаемой ее радионавигационной частью. То есть решение задачи обеспечивается. Также очевидно, что на момент вычисления корректирующих поправок ошибки расчета углов ориентации инерциальной частью становятся практически равными ошибкам расчета углов ориентации радионавигационной частью. После этого время накопления ошибок инерциальной частью, по крайней мере, не быстрее, чем было бы без коррекции (ошибка определения угла
ориентации по данным радионавигационной части может не совпадать по знаку с ошибкой определения скорости соответствующего угла ориентации). Следовательно, при постоянной длительности интервала между проведением коррекций в канале к моменту очередной коррекции ошибка расчета углов ориентации инерциальной частью будет (по модулю) не больше суммы модуля ошибки в начале интервала и интеграла модуля соответствующей скоростной ошибки за тот же период времени. Поэтому в среднем модуль ошибки будет меньше. Если же коррекция проводится по достижению порогового рассогласования между соответствующими углами, сформированными инерциальной и радионавигационной частями, то удлиняется межкоррекционный интервал, т.е. продолжительность нахождения навигационной системы в инерциальном режиме.
Из описанного также следует, что состав навигационной системы минимален по разнообразию. В нее входят лишь радионавигационная часть и ДУС. Учитывая погрешности измерения радионавигационной частью линейных скоростей (не хуже 0,5 м/с), высоты (5-10 м) для скоростей движения выше 50 м/с, ошибки расчета углов ориентации по ее данным не превысят 2-3° (по модулю). Поэтому после корректировки углов ориентации остается запас времени, в течение которого инерциальная часть может накапливать допустимую ошибку (7-8°).
Поскольку при нормально работающей радионавигационной части (с возможными кратковременными сбоями в несколько секунд) корректировка может быть проведена в удобный момент времени, практически предельные ошибки определения углов ориентации не превысят в течение полета (независимо от его продолжительности) допустимого предела в 5-10° (по модулю). При этом на интервалах перерывов в работе радионавигационной части, инерциальная часть не успеет накопить ошибки, превышающие указанный предел.
Таким образом, поставленная задача автоматизации обеспечения устойчивого полета летательного аппарата выполнена.
Заявленный технический результат достигается.
При этом не требуется расширения аппаратурного состава навигационной системы.
В качестве дополнительного технического результата достигается повышение автономности работы навигационной системы (она допускает периодическую, при необходимости, возможность работы без поступления информации от внешних источников искусственной природы) и пассивный (полуактивный при приеме информации радионавигационной частью) режим ее работы.
Каждое из представляемых технических решений по совокупности существенных признаков являются новым и технически реализуемым.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Патент РФ №2273826, МПК G01С 21/24, G01S 5/02, 2004 г.
2. ГОСТ 20058-80. Динамика летательных аппаратов в атмосфере. Термины, определения и обозначения.
3. «Разработка управляющих программ промышленных роботов». Курс лекций, - Минск, Белорусский государственный университет информатики и радиоэлектроники, 2008 г. - 131 с. https://www.bsuir.bv/rn/12 113415 1 70397.pdf.
4. Патент РФ №2258907, МПК G01C 19/44, 2002 г.
5. Антонец Е.В., Кочергин В.И., Федосеева Г.А. «Приборное оборудование воздушных судов и его летная эксплуатация». Учебное пособие, г. Ульяновск, УВАУ ГА, 2014 г. - 62 с. http://venec.ulstu.ru/lib/disk/2015/Antonets 2.pdf 3.
6. Патент РФ №2276384, МПК G01S 5/00, 2004 г.
7. Матвеев В.В., Распопов В.Я. «Основы построения бесплатформенных инерциальных навигационных систем» - СПб, ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009 г. - 280 с.
8. АЭРОДИНАМИКАСАМОЛЕТА http://aviaclub.ru/uploads/media/Aerodynamics.pdf
9. Лебедев А.А., Чернобровкин Л.С. «Динамика полета беспилотных летательных аппаратов», 2-е изд., М, «Машиностроение», 1973 г. - 616 с.
10. Датчики авионики / ТЕМА 10, https://studfile.net/preview/942822/Уфимский_Государственный_Авиационный_Технический Университет, 2014 г.
11. «ГЛОНАСС. Принципы построения и функционирования». Справочное пособие. Изд. 4-е, перераб. и доп., под ред. Перова А.И. и Харисова В.Н., М., «Радиотехника», 2010 г. - 800 с.
12. «Управление и наведение беспилотных маневренных летательных аппаратов на основе современных информационных технологий», под ред. Красилыцикова М.Н. и Себрякова Г.Г., М., ФИЗМАТЛИТ, 2003 г. - 280 с.
13. Егорушкин А.Ю., Мкртчян В.И. «Коррекция углов ориентации в бесплатформенных инерциальных навигационных системах». Инженерный журнал: наука и инновации, 2017 г., вып. 8. http://dx.doi.org/10.18698/2308-6033-2017-8-1664.
14. Функция ATAN2 http://old.exponenta.m/soft/MATLAB/potemkin/book2/chapter6/contens.asp.
15. Емельянцев Г.И., Степанов А.П. «Интегрированные инерциально-спутниковые системы ориентации и навигации» под общ. ред. Пошехонова В.Г., СПб, ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2016 г. - 394 с.
16. Анучин О.Н., Емельянцев Г.И. «Интегрированные системы ориентации и навигации для морских подвижных объектов» под общ. ред. Пошехонова В.Г., СПб, ГНЦ РФ ЦНИИ «Электроприбор», 1999 г. - 357 с.
17. ГОСТ 4401-81. Атмосфера стандартная. Параметры.
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный способ коррекции углов ориентации БИНС | 2020 |
|
RU2754396C1 |
| Способ коррекции углов ориентации БИНС | 2022 |
|
RU2796328C1 |
| Способ коррекции углов ориентации ЛА по сигналам от одноантенной СНС | 2022 |
|
RU2790081C1 |
| Способы коррекции показаний инерциальной части радиоинерциальной системы навигации | 2023 |
|
RU2840478C2 |
| Способ коррекции углов ориентации БИНС на скользящем интервале | 2022 |
|
RU2790076C1 |
| Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации | 2020 |
|
RU2745083C1 |
| Способ определения углов пространственной ориентации | 2016 |
|
RU2713078C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2594631C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2589495C1 |

Изобретение относится к области систем ориентации летательных аппаратов (ЛА), преимущественно беспилотных самолетного типа и управляемых снарядов. Заявляемые способы определения значений углов ориентации в процессе движения летательного аппарата и коррекции значений углов ориентации заключаются в том, что для определения в радионавигационном режиме работы углов курса и тангажа используются высота и линейные скорости, найденные радионавигационной частью (РНС) навигационной системы, и углы отклонения управляющих аэродинамических поверхностей ЛА. Для определения угла крена в этом режиме периодически ЛА подвергается тестовому перемещению в плоскости перпендикулярной его продольной оси. На интервалах времени, соответствующих тестовым перемещениям, находятся производные линейных скоростей, которые после учета ускорения силы тяжести пересчитываются в полусвязанную систему координат (ПССК). Соотношение между значениями проекций ускорения на вертикальную и поперечную оси ПССК служит для определения угла крена. Получаемые на основании данных РНС углы курса, тангажа и крена применяют для коррекции результатов расчетов этих же углов с помощью инерциальной части (ИНС) навигационной системы. Технический результат – повышение точности задания начальных условий при перезапуске расчета углов курса, тангажа и крена в инерциальном режиме работы навигационной системы за счет проведения коррекции и, как следствие, повышение длительности нахождения ЛА в этом режиме без снижения вероятности выполнения полетного задания. 6 н. и 6 з.п. ф-лы, 1 ил.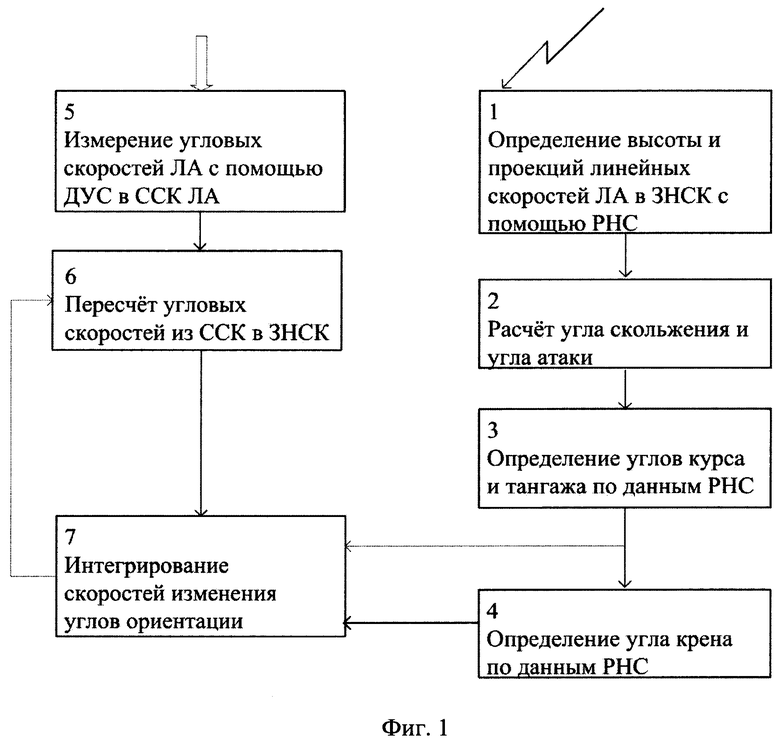
1. Способ определения значения угла курса в процессе движения летательного аппарата, заключающийся в том, что на базе информации, формируемой радионавигационной частью его навигационной системы, формируют значения вертикальной координаты объекта (высоты) и проекций линейной скорости объекта на вертикальную, продольную и поперечную оси земной нормальной системы координат (ЗНСК), в которой счисляется траектория летательного аппарата, отличающийся тем, что определяют угол поворота траектории, исходя из того, что проекция скорости объекта на продольную ось ЗНСК является по отношению к углу поворота траектории прилежащим катетом, а проекция скорости объекта на поперечную ось ЗНСК - противолежащим катетом прямоугольного треугольника, рассчитывают по трем проекциям скорости значение ее модуля, определяют ожидаемый угол скольжения исходя из вектора скорости и высоты объекта, а также углов отклонения соответствующих управляющих поверхностей летательного аппарата (ЛА), и формируют угол курса объекта, добавляя угол скольжения к полученному значению угла поворота траектории.
2. Способ определения значения угла тангажа в процессе движения летательного аппарата, заключающийся в том, что на базе информации, формируемой радионавигационной частью его навигационной системы, формируют значения вертикальной координаты объекта (высоты) и проекций линейной скорости ЛА на вертикальную, продольную и поперечную оси земной нормальной системы координат, в которой счисляется траектория летательного аппарата, отличающийся тем, что определяют по значениям проекций скорости объекта на продольную и поперечную оси ЗНСК модуль горизонтальной составляющей скорости, находят значение угла наклона траектории, исходя из того, что проекция скорости объекта на вертикальную ось ЗНСК является по отношению к углу наклона траектории противолежащим катетом, а горизонтальная составляющая скорости объекта - прилежащим катетом прямоугольного треугольника, рассчитывают по трем проекциям скорости значение ее модуля, определяют ожидаемый угол атаки, исходя из модуля скорости и высоты объекта, а также углов отклонения соответствующих управляющих поверхностей ЛА, и формируют угол тангажа объекта, добавляя угол атаки к полученному значению угла наклона траектории.
3. Способ определения значения угла крена в процессе движения летательного аппарата, заключающийся в том, что на базе информации, формируемой радионавигационной частью его навигационной системы, формируют значения проекций линейной скорости объекта на вертикальную, продольную и поперечную оси земной нормальной системы координат, в которой счисляется траектория летательного аппарата, отличающийся тем, что периодически формируют импульсное управляющее воздействие для перемещения ЛА в направлении вертикальной или поперечной осей связанной системы координат ЛА, на интервалах движения ЛА в процессе применения управляющего воздействия определяют значения производных от проекций линейных скоростей объекта на оси ЗНСК, сглаживают их, корректируют вертикальную компоненту на величину ускорения силы тяжести, находят проекции ускорений на вертикальную и поперечную оси полусвязанной системы координат (ПССК) ЛА, используя углы курса и тангажа, при этом угол крена определяют исходя из того, что проекция ускорения объекта на ось ПССК, в направлении одноименной оси, с которой прикладывалось управляющее воздействие, является по отношению к углу крена прилежащим катетом, а другая из указанных проекций ускорения в ПССК ЛА - противолежащим катетом прямоугольного треугольника.
4. Способ определения значения угла крена в процессе движения летательного аппарата, заключающийся в том, что на базе информации, формируемой радионавигационной частью его навигационной системы формируют значения вертикальной координаты объекта (высоты) и проекций линейной скорости объекта на вертикальную, продольную и поперечную оси земной нормальной системы координат, в которой счисляется траектория летательного аппарата, отличающийся тем, что периодически формируют импульсное управляющее воздействие для перемещения ЛА в направлении вертикальной или поперечной осей связанной системы координат ЛА, на интервалах движения ЛА в процессе применения управляющего воздействия определяют значения производных от проекций скоростей объекта на оси ЗНСК, сглаживают их, корректируют вертикальную компоненту на величину ускорения силы тяжести, вычисляют углы курса и тангажа по высоте и проекциям линейной скорости объекта, а также углам отклонения соответствующих управляющих поверхностей ЛА, используя углы курса и тангажа, находят проекции ускорений на вертикальную и поперечную оси полусвязанной системы координат ЛА, угол крена определяют исходя из того, что проекция ускорения объекта на ось ПССК, в направлении одноименной оси, с которой прикладывалось управляющее воздействие, является по отношению к углу крена прилежащим катетом, а другая из указанных проекций ускорения в ПССК ЛА - противолежащим катетом прямоугольного треугольника.
5. Способ коррекции в процессе движения летательного аппарата значений углов ориентации, формируемых инерциальной частью его навигационной системы, с использованием углов ориентации по пп. 1 – 4, характеризующийся тем, что с помощью инерциальной части навигационной системы измеряют угловые скорости в связанной системе координат (ССК) ЛА, формируют на их основе углы ориентации, с помощью радионавигационной части навигационной системы определяют в ЗНСК высоту объекта и проекции его линейной скорости на три оси ЗНСК, отличающийся тем, что по высоте и линейным скоростям ЛА, определенным на базе информации, формируемой радионавигационной частью его навигационной системы, а также углам отклонения соответствующих управляющих поверхностей ЛА, определяют углы его ориентации, периодически сравнивают значения углов ориентации, полученных на базе информации, формируемой радионавигационной частью его навигационной системы, со значениями углов ориентации, формируемыми инерциальной частью его навигационной системы, а полученные разности используют для формирования на очередном интервале времени корректирующих воздействий на углы ориентации, формируемые инерциальной частью навигационной системы.
6. Способ коррекции в процессе движения летательного аппарата значений углов ориентации, формируемых инерциальной частью его навигационной системы, с использованием углов ориентации по пп. 1 – 4, характеризующийся тем, что с помощью инерциальной части навигационной системы измеряют угловые скорости в ССК ЛА, формируют на их основе углы ориентации, с помощью радионавигационной части навигационной системы определяют в ЗНСК высоту объекта и проекции его линейной скорости на три оси ЗНСК, отличающийся тем, что угловые скорости, измеренные в ССК, пересчитывают в скорости изменения углов ориентации, используя углы курса и тангажа, например, по методу Эйлера-Крылова, при этом скорости изменения углов ориентации интегрируют, определяют альтернативные значения углов ориентации ЛА по углам отклонения соответствующих управляющих поверхностей ЛА, а также по высоте и линейным скоростям ЛА, вычисленным на базе информации, формируемой радионавигационной частью его навигационной системы, и используют эти альтернативные значения углов ориентации ЛА для изменения начальных условий интегрирования на очередном интервале времени, в течение которого корректирующие поправки сохраняются.
7. Способ коррекции в процессе движения летательного аппарата значений углов ориентации, формируемых инерциальной частью его навигационной системы, по п. 5, отличающийся тем, что полученные разности соответствующих углов ориентации используют на очередном интервале времени для прибавления их к углам ориентации, формируемым инерциальной частью навигационной системы на указанном интервале времени.
8. Способ коррекции в процессе движения летательного аппарата значений углов ориентации, формируемых инерциальной частью его навигационной системы, по п. 5, отличающийся тем, что формируемые инерциальной частью навигационной системы углы ориентации получают, используя углы тангажа и крена для пересчета угловых скоростей, измеренных в ССК ЛА с помощью инерциальной части навигационной системы, в скорости изменения углов ориентации, которые затем интегрируют.
9. Способ коррекции в процессе движения летательного аппарата значений углов ориентации, формируемых инерциальной частью его навигационной системы, по п. 5, отличающийся тем, что формируемые инерциальной частью навигационной системы углы ориентации получают, используя углы тангажа и крена для пересчета угловых скоростей, измеренных в ССК ЛА с помощью инерциальной части навигационной системы, в скорости изменения углов ориентации, которые затем интегрируют, при этом разности углов ориентации делят на интервал времени, прошедший с момента предыдущей коррекции, и на очередном интервале времени прибавляют соответствующие величины к скоростям изменения углов ориентации, причем в качестве начальных условий на очередном временном интервале используют углы ориентации, сформированные на базе данных от радионавигационной части навигационной системы, на момент вычисления параметров коррекции.
10. Способ коррекции в процессе движения летательного аппарата значений углов ориентации, формируемых инерциальной частью его навигационной системы, по п. 5 или 6, отличающийся тем, что для определения значения угла курса на базе информации, формируемой радионавигационной частью навигационной системы летательного аппарата, определяют угол поворота траектории, исходя из того, что проекция линейной скорости ЛА на продольную ось ЗНСК является по отношению к углу поворота траектории прилежащим катетом, а проекция линейной скорости объекта на поперечную ось ЗНСК - противолежащим катетом прямоугольного треугольника, рассчитывают по трем проекциям линейной скорости значение ее модуля, определяют ожидаемый угол скольжения, исходя из вектора скорости и высоты объекта, а также углов отклонения соответствующих управляющих поверхностей ЛА, и формируют угол курса объекта, добавляя угол скольжения к полученному значению угла поворота траектории.
11. Способ коррекции в процессе движения летательного аппарата значений углов ориентации, формируемых инерциальной частью его навигационной системы, по п. 5 или 6, отличающийся тем, что для определения значения угла тангажа на базе информации, формируемой радионавигационной частью навигационной системы летательного аппарата, определяют по значениям проекций линейной скорости объекта на продольную и поперечную оси ЗНСК модуль горизонтальной составляющей линейной скорости, находят значение угла наклона траектории, исходя из того, что проекция линейной скорости объекта на вертикальную ось ЗНСК является по отношению к углу наклона траектории противолежащим катетом, а горизонтальная составляющая линейной скорости объекта – прилежащим катетом прямоугольного треугольника, рассчитывают по трем проекциям линейной скорости значение ее модуля, определяют ожидаемый угол атаки, исходя из модуля скорости и высоты объекта, а также углов отклонения соответствующих управляющих поверхностей ЛА и формируют угол тангажа объекта, добавляя угол атаки к полученному значению угла наклона траектории.
12. Способ коррекции в процессе движения летательного аппарата значений углов ориентации, формируемых инерциальной частью его навигационной системы, по п. 5 или 6, отличающийся тем, что для определения значения угла крена на базе информации, формируемой радионавигационной частью навигационной системы летательного аппарата, периодически формируют импульсное управляющее воздействие для перемещения ЛА в направлении вертикальной или поперечной осей связанной системы координат ЛА, на интервалах движения ЛА в процессе применения управляющего воздействия определяют значения производных от проекций скоростей объекта на оси ЗНСК, сглаживают их, вычисляют углы курса и тангажа по высоте и проекциям линейной скорости объекта, а также углам отклонения соответствующих управляющих поверхностей ЛА, используя углы курса и тангажа, находят проекции ускорений на вертикальную и поперечную оси полусвязанной СК ЛА, угол крена определяют, исходя из того, что проекция ускорения объекта на ось ПССК, в направлении одноименной оси, с которой прикладывалось управляющее воздействие, является по отношению к углу крена прилежащим катетом, а другая из указанных проекций ускорения в ПССК объекта - противолежащим катетом прямоугольного треугольника.
| НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТРОЙСТВО ВЫЧИСЛЕНИЯ СКОРОСТИ И КООРДИНАТ, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2373498C2 |
| КОМПЛЕКС БОРТОВЫХ ТРАЕКТОРНЫХ ИЗМЕРЕНИЙ | 1995 |
|
RU2116666C1 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА НА ЗАПРОГРАММИРОВАННЫЙ АЭРОДРОМ | 2013 |
|
RU2549145C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ САМОЛЕТА | 2003 |
|
RU2240507C1 |
| СПОСОБ КОРРЕКЦИИ БЕСПЛАТФОРМЕННОЙ ИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2014 |
|
RU2564380C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННЫХ КООРДИНАТ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2443978C1 |
| Автомобиль-сани, движущиеся на полозьях посредством устанавливающихся по высоте колес с шинами | 1924 |
|
SU2017A1 |

