Изобретение относится к области радиоинерциальных систем навигации (РИСН) и/или ориентации мобильных устройств (МУ), преимущественно беспилотных надводных, наземных и летательных аппаратов, а также устройств, размещенных на качающемся (вращающемся) основании.
Из-за дрейфа сигналов датчиков инерциальной части системы навигации (ИСН) нужно осуществлять компенсацию их ухода. Это, в свою очередь, кроме некоторых частных случаев, требует пересчета корректирующих сигналов в систему координат (СК), в которой установлены датчики, либо показаний датчиков (или параметров, рассчитанных на их основании) в СК, в которой были рассчитаны корректируемые невязки. Для пересчета из одной СК в другую требуется знать либо углы ориентации МУ относительно СК, в которой рассчитывается его перемещение, либо взаимнооднозначно связанные с углами ориентации параметры Родрига-Гамильтона, либо значения направляющих косинусов (девять косинусов рассчитываются по тригонометрическим функциям углов ориентации либо путем решения дифференциального уравнения Пуассона). Предпочтительно иметь возможность получать исходные данные для вычисления этих величин от радионавигационной части (РСН) интегрированной системы. Это позволит минимизировать состав системы и выполнить ее более компактной.
Подходы к проведению коррекции акселерометров достаточно известны, так как основной задачей навигационных систем является определение координат и линейных скоростей МУ ([1, стр. 248-251] - Матвеев В.В., Распопов В.Я. «Основы построения бесплатформенных инерциальных навигационных систем» - СПб, ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009 г.). Коррекция акселерометров, в общем случае, сводится к приведению измеренных ускорений (с поправкой на ускорение свободного падения) и рассчитанных РСН координат и/или линейных скоростей в одну систему координат, расчет невязок в этой СК, пересчет полученных невязок в поправки к коэффициентам модели акселерометров в той СК, в которой он проводит измерения, или в СК, в которой РИСН выдает информацию потребителю. Однако, даже в этом случае для преобразования координат требуется знать углы ориентации или связанные с ними параметры. При этом значения углов ориентации (параметров) не должны иметь нарастающих ошибок. Как производить коррекцию ИСН, используя полученные углы ориентации, описано, например, в [2] - Патент РФ №2776856, МПК G01C 21/20, 2020 г., «Способы определения значений углов ориентации в процессе движения летательного аппарата и коррекции значений углов ориентации».
Известен способ определения ориентации подвижного объекта, использующий аппаратуру спутниковой навигации [3] - Патент РФ №2273826, МПК G01C 21/24, G01S 5/02, 2004 г., «Способ определения углов ориентации подвижного объекта и устройство для его осуществления». Этот способ характеризуется тем, что аппаратура спутниковой навигации (радионавигационная) содержит одно антенное устройство, используются три гироинтегратора, размещенных на осях связанной с объектом системы координат, используется бортовой вычислитель, в котором реализован алгоритм определения ориентации подвижного объекта, основанный на определении элементов матрицы перехода между начальной стартовой (земной нормальной - ЗНСК) и связанной (ССК) с объектом (определение систем координат в соответствии с [4] - «Динамика летательных аппаратов в атмосфере. Термины, определения и обозначения», ГОСТ 20058-80). Используется следующий порядок действий: аппаратура спутниковой навигации (РСН) и три гироинтегратора одновременно определяют значения проекций вектора скорости: РСН - в стартовой, а гироинтеграторы - в связанной с объектом системах координат соответственно. Определенные значения проекций скорости передаются в вычислитель, который, используя полученную информацию, определяет значения углов ориентации объекта в пространстве по алгоритму определения ориентации подвижного объекта. Этот алгоритм основан на уравнениях связи между ЗНСК и ССК.
Данный способ обладает следующими недостатками:
- из-за наличия ненулей в гироинтеграторах накапливаются ошибки, соответственно, в правых частях предложенной к решению системы уравнений параметры со временем все более отличаются от истинных значений, соответствующих текущему моменту;
- предложенный алгоритм представляет собой подход к решению обратной задачи кинематики [5, стр. 14, 15, 54-85], по своей сути неоднозначной, поэтому при перерыве в получении координат от аппаратуры спутниковой навигации, восстановление правильного решения задачи не всегда обеспечивается.
Альтернативного способа формирования углов ориентации в указанном техническом решении не приводится.
Известно применение для определения углов ориентации бесплатформенных навигационных систем [6, стр. 20-24, рис. 2.1, 2.3] - Антонец Е.В., Кочергин В.И., Федосеева Г.А. «Приборное оборудование воздушных судов и его летная эксплуатация». Учебное пособие, г. Ульяновск, УВАУ ГА, 2014 г.
В этом устройстве для формирования углов ориентации измеряют угловые скорости в ССК объекта и пересчитывают их по уравнениям Эйлера-Крылова в угловые скорости изменения углов ориентации [6, стр. 10, формула (1.2)], интегрируют их. При этом используют полученные углы тангажа и крена при расчетах угловых скоростей изменения курса, тангажа и крена. Для периодической корректировки каналов тангажа и крена переводят летательный аппарат (ЛА) в горизонтальный полет с постоянной скоростью, измеряют показания акселерометров, установленных на ЛА, и определяют по ним углы тангажа и крена. Разность между углами, определенными с помощью акселерометров, и углами, определенными интегрированием, используют как поправку к сигналам соответствующих углов ориентации, полученных интегрированием, на очередном периоде работы. Недостатком данного способа является то, что поправку по курсу так получить нельзя. То есть полная триада углов ориентации не может быть получена. Кроме того, для беспилотного ЛА (БПЛА) в процессе вывода в режим тестового движения нельзя только по показаниям акселерометров определить, является ли полет горизонтальным без ускорения, или имеют место и наклон и ускорение. Поэтому для БПЛА невозможно точно определить и тангаж с креном. Соответственно без знания всех трех углов ориентации корректировка ИСН не может быть проведена.
Известен также способ определения угловой ориентации объекта [7] - Патент РФ №2276384, МПК G01S 5/00, 2004 г., «Способ определения угловой ориентации объекта». Он основан на приеме сигналов от космических аппаратов глобальных навигационных спутниковых систем на разнесенные антенны количеством не менее трех, расположенные на объекте так, чтобы они не лежали на одной прямой. При этом антенны принимают сигналы от спутников, на основе которых определяются координаты спутников и разности фаз несущей частоты сигналов, принимаемых от спутников на разнесенные антенны. В разностях фаз содержится информация об углах между направлениями на спутники и векторами, образованными антеннами. На основе знания разностей фаз с привлечением информации о расположении антенн относительно объекта, о координатах объекта и о координатах спутников решается задача ориентации. При этом антенны принимают сигналы только от двух спутников (а не от трех и более), а информацию о координатах объекта получают от инерциальной навигационной системы или используют информацию о координатах точки старта. Навигационная система, реализующая такой способ, не может быть размещена на малогабаритном объекте (расстояние между антеннами должно превышать длину волны (дециметровый диапазон), на которой ведется передача сигналов со спутников).
В книге [8, стр. 77,78] - «ГЛОНАСС. Принципы построения и функционирования». Справочное пособие. Изд. 4-е, перераб. и доп., под ред. Перова А.И. и Харисова В.Н., М., «Радиотехника», 2010 г. описано решение с двумя разнесенными на расстояние d друг от друга антеннами РСН. Ориентация линии d относительно связанной СК (ССК) МУ, на котором установлены антенны, априори известна. РСН измеряет псевдодальности от каждой из антенн до трех излучателей с известными на момент излучения сигналов координатами. По полученным псевдодальностям и длине линии d рассчитываются косинусы углов между линиями визирования одной и той же антенны в момент приема соответствующего сигнала на положение излучателя сигнала в момент его передачи. Значения тех же косинусов углов могут быть выражены через три неизвестных направляющих косинуса cosψx, cosψy, cosψz, определяющих положение линии d относительно геоцентрической СК, и направляющие косинусы векторов указанных выше линий визирования, которые могут быть определены в приемнике сигналов антенны. Таким образом, формируется система из трех линейных уравнений с тремя неизвестными. Необходимое количество наблюдаемых излучателей может быть уменьшено до двух, если одно из уравнений заменить уравнением связи:
cos2ψх+cos2ψy+ cos2ψz=1
Недостатком этой системы является то, что получаемые углы не являются углами ориентации МУ в том смысле, как они определены в [2], поскольку получаются относительно геоцентрической СК, а не ЗНСК. Возможность коррекции ИСН также не предусмотрена.
Там же ([8, стр. 79]) указано, что вместо cosψх+cosψy+ cosψz в систему уравнений можно подставить члены вида Δϕiλ/(2πd, где Δϕi - разности фаз несущей принимаемых антеннами радиосигналов, λ - длина волны, соответствующая несущей частоте передаваемого излучателем сигнала. Помимо указанных выше недостатков в данном случае необходимо решать проблему неоднозначности фазовых измерений.
Известен способ [9] - Егорушкин А.Ю., Мкртчян В.И. «Коррекция углов ориентации в бесплатформенных инерциальных навигационных системах». Инженерный журнал: наука и инновации, 2017 г., вып.8. http://dx.doi.org/10.18698/2308-6033-2017-8-1664. В этом способе (метод 1) для первоначальной оценки углов ориентации рассматривают движение объекта над эллипсоидом Земли, и измеряют в ССК кажущиеся линейные ускорения и угловые скорости. Используя измеренные значения, формируют матрицу направляющих косинусов, связывающую ССК и ЗНСК. Так как значения направляющих косинусов выражаются через тригонометрические функции углов ориентации [1, стр. 126, формула (3.26)], имеется возможность путем решения соответствующих тригонометрических уравнений определить углы. При этом требуется исключить неоднозначность решений, т.к. в девяти возможных уравнениях имеется только три неизвестных. Для исключения неоднозначности по углу курса полагается, что угол поворота траектории, формируемый на основании измерений линейных скоростей с помощью спутниковой (радионавигационной) системы, соответствует углу курса. По рассогласованиям в ЗНСК между показаниями линейной скорости от радионавигационной системы и линейными скоростями, полученными интегрированием сигналов акселерометров, для повышения точности счисления углов тангажа и крена находят дрейфы датчиков угловой скорости (ДУС) в проекциях на оси ЗНСК. Пересчитывают их в ССК, используя транспонированную матрицу направляющих косинусов, и используют полученные значения для коррекции текущих показаний ДУС. Процесс требует обязательного измерения линейных ускорений. В процессе получения линейных скоростей интегрированием показаний акселерометров имеют место нарастающие со временем (по модулю) ошибки. Поэтому проблема полной компенсации дрейфов ДУС не решена. Порядок компенсации погрешностей акселерометров не предложен. Таким образом задача коррекции ИСН в полном объеме не решена.
Известны интегрированные навигационные системы [8, стр. 643-649] - «ГЛОНАСС. Принципы построения и функционирования». Справочное пособие. Изд. 4-е, перераб. и доп., под ред. Перова А.И. и Харисова В.Н., М., «Радиотехника», 2010 г. В этих навигационных системах имеется радионавигационная часть и инерциальнонавигационная часть. Инерциальная часть содержит акселерометры и гироскопы (датчики угловой скорости). Счисление углов ориентации объекта, где установлена навигационная система, осуществляется интегрированием угловых скоростей, полученных путем пересчета значений, измеренных ДУС, в систему координат, в которой определяются углы ориентации. При таком способе определения углов ориентации ошибки непрерывно увеличиваются из-за наличия в сигналах ДУС неучтенных значений ненолей. Корректировка в процессе движения не выполняется (предусмотрена только компенсация инструментальных ошибок, измеряемых в заводских или предполетных условиях).
По мнению заявителя, наиболее близкой к заявляемому техническому решению является РИСН, описанная в [8, стр. 663-664, рис. 17.10] - «ГЛОНАСС. Принципы построения и функционирования». Справочное пособие. Изд. 4-е, перераб. и доп., под ред. Перова А.И. и Харисова В.Н., М, «Радиотехника», 2010 г. Она состоит из радионавигационной части, инерциальной навигационной части, фильтра Калмана вторичной обработки, блока пересчета и сумматора. Так как сумматор используется только для коррекции выходных сигналов гироскопов, он может рассматриваться как часть ИСН. Блок пересчета и фильтр Калмана вторичной обработки могут рассматриваться как блок совместной обработки (БСО) сигналов инерциальной и радионавигационной частей. В РСН имеется несколько приемных каналов. На выходах каждого из них формируются оценки псевдодальностей и псевдоскоростей по отношению к соответствующему излучателю. Количество необходимых приемных антенн не оговорено. В ИСН входят акселерометры и гироскопы. По результатам совместной обработки сигналов ИСН и РСН производится корректировка параметров приемных каналов РСН и выходных сигналов гироскопов ИСН. При этом выходные сигналы гироскопов рассматриваются как углы ориентации и их используют для пересчета сигналов акселерометров в систему координат, используемую потребителем.
Недостатками этой РИСН являются определение углов ориентации с нарастающими по модулю с течением времени погрешностями, корректировка ИНС производится не в полном объеме, а только в части гиродатчиков.
Задачей предлагаемой группы технических решений является повышение уровня автоматизации работы.
Достигается это за счет определения углов ориентации в радионавигационном и интегрированном режимах без нарастающих со временем ошибок и проведения корректировок ИСН как в части угловых, так и линейных величин.
Техническим результатом предлагаемой группы технических решений является повышение точности работы РИСН как в инерциальном, так и в интегрированном (комплексированном) режимах; увеличение длительности возможного нахождения в инерциальном режиме до достижения предельных по модулю величин ошибок ИСН.
Технический результат достигается за счет того, что РИСН, установленная на МУ, содержит последовательно соединенные РСН, БСО и ИСН, и при этом выход ИСН соединен со вторым входом БСО. Радионавигационная часть системы выполняется с возможностью выполнения функций фазового пеленгатора и определения углов ориентации (или других однозначно связанных с ними параметров) МУ. В состав РИСН введен многоэлементный антенный блок, выход которого соединен с первым входом РСН, второй вход которой соединен со вторым выходом БСО. При этом третий выход БСО служит выходом РИСН.
Технический результат достигается и тогда, когда отсутствует передача данных из БСО в РСН или из ИСН в БСО, или в обоих этих направлениях.
Для пояснения предлагаемых технических решений используются следующие иллюстрации:
- фиг. 1 - обобщенная функциональная схема радиоинерциальной навигационной системы;
- фиг. 2 - правая земная нормальная система координат;
- фиг. 3 - один из возможных вариантов функциональной схемы ИСН;
- фиг. 4 - один из возможных вариантов функциональной схемы РСН;
- фиг. 5 - один из возможных вариантов функциональной схемы БСО.
На фиг. 1 изображены последовательно соединенные антенный блок(1), РСН (2), БСО (3) и ИСН (4), при этом выход ИСН соединен со вторым входом БСО, а второй выход БСО - со вторым входом РСН. Прямые и обратные связи между блоками условно изображены дуплексными каналами. Связь может осуществляться и в других вариантах, в том числе симплексном и по общей шине передачи данных (см., например, [10, стр. 96-113, рис. 4.5] - Кучерявый А.А. «Бортовые информационные системы»: Курс лекций под. ред. В.А. Мишина и Г.И. Клюева. - 2-е изд., перераб. и доп.- Ульяновск: УлГТУ, 2004 г.). Выбор типа интерфейса, параллельных или последовательных каналов передачи, кодовое или частотное разделение сигналов (мультиплексирование) также не является существенным для предлагаемых технических решений.
На фиг. 2 приведена ЗНСК с примером раскладки по ее осям вектора линейной скорости V МУ (фиг. 2а). Показанные на фиг. 2б угол поворота траектории и на фиг. 2в угол наклона траектории при отсутствии углов скольжения и атаки совпадают соответственно с углами курса и тангажа МУ. Угол крена (на иллюстрации не показан) определяется поворотом вокруг оси X полусвязанной СК, получаемой после двух последовательных поворотов ЗНСК сначала на угол курса, а затем на угол тангажа.
На фиг. 3 схематически изображена инерциальная часть (4) РИСН, в которой показаны блоки (5), (6) акселерометров и гироскопов (потенциально могут использоваться и другие датчики, например, магнитного поля, давления, скорости воздуха (воды) и т.д.). Их выходы соединены с соответствующими интеграторами (7). Результаты интегрирования передаются на вход (входы) преобразователя (8) координат ПК 1, выход которого рассматривается как выход ИСН (4). Дополнительный многоканальный вход интеграторов (7) предназначен для приема от БСО (2) сигналов, содержащих поправки, или на базе которых могут быть вычислены поправки к показаниям датчиков. Последовательность установки интеграторов (7) и ПК1 (8) может быть изменена. Некоторые другие возможные вариации исполнения будут даны в описании работы.
На фиг. 4 схематически изображена радионавигационная часть (2) РИСН, содержащая последовательно соединенные радиочастотные каналы и корреляторы (9) (РЧКК), схемы (10) слежения (за фазой, частотой, временной задержкой и т.п.) и блок (11) вычисления координат и углов ориентации (БВКУО). На вход (входы) РЧКК (9) подаются радиочастотные (РЧ) сигналы от АБ(1). Выход схем (10) слежения может быть также соединен с дополнительным входом РЧКК (9), который может использоваться для подстройки по соответствующим параметрам. Также у схем (10) слежения может быть дополнительный вход (входы) для приема сигналов, например, от БСО (3) или от ИСН (4) через БСО (3) для улучшения условий работы (в частности, знание дальности до излучателей уменьшает ширину окна захвата по временной задержке в приеме сигнала от соответствующего излучателя, а знание проекций линейных скоростей по направлениям излучатель-антенна помогает оценить доплеровские смещения частот несущих).
Па фиг. 5 приведен пример одного из возможных схематических исполнений блока (3) совместной обработки. В этом варианте БСО (3) состоит из последовательно соединенных блока (12) сравнения (БС) и второго преобразователя (13) координат (ГГК2), последовательно соединенных фильтра (14) совместной обработки сигналов (ФСОС) и третьего преобразователя (15) координат (ПКЗ). На первые входы БС (12) и ФСОС (14) поступают сигналы с выхода РСН (2), а на их вторые входы - с выхода ИСН(З). Выход ФСОС (14) используется также как выход БСО (3), предназначенный для потребителя, а выходы ПК2(13) и ПКЗ (15)- как выходы БСО (3), предназначенные для выдачи сигналов соответственно в ИСН (4) (первый) и РСН (2) (второй). Все выходы и входы могут быть многоканальными.
Все используемые блоки являются известными или могут быть получены путем соединения известных блоков известными методами. РСН (2), ИСН (4) могут быть взяты аналогичными прототипу. Антенный блок(1) может быть исполнен как в [7], [8, стр. 77-79], [11, стр. 141-145]. Варианты построения составных частей блока (3) совместной обработки будут описаны ниже.
Работа предлагаемой РИСН может осуществляться в следующих режимах:
а) чисто инерциальном;
б) чисто радионавигационном;
в) комплексированном.
Формирование логики переключения режимов не является существенным для предлагаемых технических решений. В частности, потребитель может сам выбрать, какие сигналы он будет использовать, руководствуясь соответствующим признаком режима работы РИСН. На фиг.1 выдача выходных данных в чисто инерциальном и чисто радионавигационном режимах условно изображена отдельными стрелками на линиях связи ИСН-БСО и РСН-БСО соответственно. Вместе с тем можно отметить, что работа в комплексированном (совмещенном, интегрированном) режиме является предпочтительной, так как обеспечивает более высокую точность и темп выдачи информации сравнимый с темпом ее выдачи в инерциальном режиме. Отказ от использования инерциальной части РИСН может быть вызван, например, неисправностью ее датчиков, а отказ от использования радионавигационной части - высоким уровнем естественных или искусственных радиопомех. Для целей описываемой группы изобретений считается, что РСН (2), по крайней мере, способна измерять в ЗНСК линейные координаты МУ (переход от геоцентрической СК, привязанной к вращающейся Земле, к ЗНСК известен и для референц-эллипсоида представлен в [12] - ГОСТ 32453-2013 «Глобальная навигационная спутниковая система. Системы координат. Методы преобразований координат определяемых точек») и выполнять функции фазового пеленгатора, то есть вырабатывать углы относительно своих осей ориентации в направлении на радиоизлучатель. Без потери общности также можно полагать, что ССК антенного блока (1) совпадает с ССК МУ (пересчет координат, при необходимости, может быть произведен по результатам проведения котировочных работ на МУ, см., например, [16, стр. 11, 12] - Драницына Е.В. «Калибровка измерительного модуля прецизионной БИНС на волоконно-оптических гироскопах». Диссертация на соискание ученой степени кандидата технических наук, - СПб., Санкт-Петербургский национальный исследовательский университет информационных технологий, механики и оптики, 2016 г.). Так как в антенном блоке (АБ) может быть более одного антенного элемента, а с другой стороны радиоизлучатели работают на разных частотах, могут быть необходимы смесители и разветвители сигналов. Поскольку их наличие (отсутствие) несущественно для описываемых технических решений, при дальнейшем описании считается, что в необходимых местах они установлены.
Рассмотрим сначала работу в инерциальном режиме. Полагаем, что оси акселерометров направлены параллельно осям ССК МУ (в противном случае по результатам юстировки с МУ может быть произведен пересчет сигналов акселерометров в ССКМУ (см. [16, стр. 11, 12]). Акселерометры, как правило, измеряют кажущиеся ускорения, то есть смещенные относительно истинных на величину проекции ускорения силы тяжести на соответствующую ось ССК. Поэтому, чтобы перейти к истинным ускорениям, нужно учесть модель погрешностей акселерометров (неноль, уход ноля, масштабный коэффициент и его изменение и т.д.) и ввести поправки на ускорение силы тяжести. Для расчета скоростей и координат МУ полученные ускорения дважды интегрируют. После чего пересчитывают в ЗНСК. Возможны и другие последовательности вычислений, например после получения откорректированных сигналов кажущихся ускорений пересчитать их в ЗНСК, уменьшить вертикальную составляющую на величину ускорения силы тяжести и дважды проинтегрировать полученную величину и горизонтальные проекции ускорения.
Пересчет из ССК в ЗНСК может осуществляться с использованием матрицы С (см. [1, стр. 126, формула (3.26)]):
где ψ - угол курса;
θ - угол тангажа;
γ - угол крена;
Т - символ транспонирования матрицы.
Обратный переход производится с помощью матрицы А (см. там же, формула (3.24)). Из(1) видно, что для осуществления преобразований необходимо знать значения углов ориентации (их синусы и косинусы). Как указывалось ранее, матрица С может быть получена в результате решения уравнения Пуассона [1, стр. 131, формула (3.49)]  проекции относительной угловой скорости на соответствующие оси ССК, которые могут быть получены на основании показаний гиродатчиков):
проекции относительной угловой скорости на соответствующие оси ССК, которые могут быть получены на основании показаний гиродатчиков):

а матрица А определена через параметры Родрига-Гамильтона [1, стр. 141, формула (3.96)]:

то есть параметры Родрига-Гамильтона, направляющие косинусы и углы ориентации являются взаимосвязанными.
В частности, параметры Родрига-Гамильтона могут быть определены через углы ориентации как [1, стр. 149, формула (3.126)]:
В свою очередь, в инерциальном режиме углы ориентации рассчитываются путем интегрирования угловых скоростей или производных от других параметров, зависящих от значений углов ориентации. Например, с использованием кинематических уравнений в углах Эйлера-Крылова [1, стр. 127, формула (3.30)]:
где ψ, θ, γ - производные от углов курса, тангажа и крена.
Для определения углов ориентации полученные производные ψ, θ, γ интегрируются.
Или после получения из (2) значений для направляющих косинусов приравнивают их стоящим на соответствующих позициях в (1) тригонометрическим выражениям.
Или рассчитывают производные от параметров кватерниона (Родрига-Гамильтона) в соответствии с [1, стр. 155, формула (3.151)]:
где  - скорости изменения соответствующих параметров кватерниона (Родрига-Гамильтона).
- скорости изменения соответствующих параметров кватерниона (Родрига-Гамильтона).
Интегрируют полученные производные  для получения параметров кватерниона (начальные условия могут быть рассчитаны, например, по (4)). Проводят их нормировку, если
для получения параметров кватерниона (начальные условия могут быть рассчитаны, например, по (4)). Проводят их нормировку, если  делением каждого из первоначально рассчитанных параметров на значение радикала. Рассчитывают значения элементов для матрицы (3), транспонируют ее (можно транспонировать и матрицу (1)). Приравнивают соответствующие выражения матрицы (1) численным значениям матрицы (3) после транспонирования. В матрицах А и С только три элемента являются независимыми. Для частного случая использования только пяти элементов из матрицы А в [1, стр. 156, формула (3.155)] предложены следующие решения:
делением каждого из первоначально рассчитанных параметров на значение радикала. Рассчитывают значения элементов для матрицы (3), транспонируют ее (можно транспонировать и матрицу (1)). Приравнивают соответствующие выражения матрицы (1) численным значениям матрицы (3) после транспонирования. В матрицах А и С только три элемента являются независимыми. Для частного случая использования только пяти элементов из матрицы А в [1, стр. 156, формула (3.155)] предложены следующие решения:

где а11, а12, а13, а22, а32 - значения членов матрицы А.
Учитывая, что сигналы, на основании которых рассчитываются значения элементов, содержат случайные погрешности, более точным, хотя и более вычислительно затратным, является применение метода наименьших квадратов ко всей системе из девяти уравнений. При этом можно, например, минимизировать сумму квадратов разностей правых и левых частей уравнений. С другой стороны, шесть нормировочных уравнений матриц А, С также дополняют систему уравнений до девяти (в [13, стр. 78, формула (2.38)] - Матвеев В.В. «Инерциальные навигационные системы», учебное пособие, г. Тула, издательство ТулГУ, 2012 г. в качестве нормировочного предложено использовать матричное уравнение ATA=CCT=Е, где Е - единичная матрица).
Так как углы курса и крена должны быть определены в диапазоне ±π, целесообразно (см. [8, стр. 705, формула (П17.40)] - «ГЛОНАСС. Принципы построения и функционирования». Справочное пособие. Изд. 4-е, перераб. и доп., под ред. Перова А.И. и Харисова В.Н., М., «Радиотехника», 2010 г.) вместо функции arctg использовать в (7) функцию atan2 ([14] - Функция ATAN2 http://old.exponenta.ru/soft/MATLAB/potemkin/book2/ chapter6/contens.asp).
Если  можно рассчитать угол тангажа θ как:
можно рассчитать угол тангажа θ как:
при cosψ≠0
Выбор зависимости в последовательности (7а)-(7г) можно проводить по максимуму модуля тригонометрической функции в знаменателе.
В предложенных вариантах определения углов ориентации используются угловые скорости, измеренные гироскопическим прибором блока (6) гироскопов (гиротахометром, динамически настраиваемым гироскопом, волоконным или лазерным гироскопом и т.п.). Соответственно, при наличии неполностью скомпенсированных ненолей датчиков, ошибка интегрирования будет неограниченно возрастать. Поэтому периодически следует производить коррекцию ИСН, причем не только в части углов ориентации, но и рассчитанных на их базе линейных скоростей и координат МУ в ЗНСК (и/или ССК в зависимости о того, какой вариант принят для корректировки). Следует также отметить, что, даже если углы ориентации измеряются расположенным на МУ прибором типа свободного гироскопа, определяющим непосредственно углы в инерциальной СК, все равно будет иметь место накапливание ошибки из-за наличия нескомпенсированных уходов ([13, стр. 46] - Матвеев В.В. «Инерциальные навигационные системы», учебное пособие, г. Тула, издательство ТулГУ, 2012 г.).
В чисто радионавигационном режиме относительно положения каждой из антенн (антенных элементов) определяются по выбранным излучателям псевдодальности (временные задержки), псевдоскорости (доплеровские смещения частоты) и фазовые сдвиги несущей между антеннами (антенными элементами). Сам принцип фазовой пеленгации известен достаточно давно ([15]- Кинкулькин И.Е., Рубцов В.Д., Фабрик М.А. «Фазовый метод определения координат». - М.: «Сов. Радио», 1979 г.). В разностях фаз, как указано в [7] (Патент РФ №2276384, МПК GO IS 5/00, 2004 г.), содержится информация об углах между направлениями на радиоизлучатели и векторами, образованными антеннами. В [11, стр. 666, 667] (Банков СВ. «Антенны спутниковых навигаторов», М., Издательство «Перо», 2014 г.) показано, что углы падения плоской волны на группу АЭ антенной решетки (АР) могут быть достаточно просто определены по смещению фаз несущей сигнала, приходящей на три АЭ (рисунок 7.4.1, формула (7.4.4)). В этой же книге (стр. 668-684) приведены и другие варианты реализации фазовых пеленгаторов. Варианты построения фазовых координаторов (с использованием двух АЭ) и обоснование принципа их действия приведены также в книге [8, стр. 77-79, формулы (4.26) и (4.28)] («ГЛОНАСС. Принципы построения и функционирования». Справочное пособие. Изд. 4-е, перераб. и доп., под ред. Перова А.И. и Харисова В.Н., М., «Радиотехника», 2010 г.).
На основании полученных данных РСН 2 определяет координаты и линейные скорости МУ в ЗНСК (фактически координаты приемных антенн). Координаты излучателей являются априори известными или могут быть определены по информации, содержащейся в сигналах, ими передаваемых. С другой стороны, используя матрицу А, координаты МУ и излучателей, на которые получены пеленги, могут быть пересчитаны в ССК МУ:

В (1 а) индекс i показывает принадлежность координат одному и тому же объекту.
Тогда расчетные пеленги в ССК от антенны с индексом j в направлении излучателя с индексом i могут быть рассчитаны, например, как:


где  - расчетная зависимость для пеленга в плоскости XZ ССК;
- расчетная зависимость для пеленга в плоскости XZ ССК;
 - расчетная зависимость для пеленга в плоскости
- расчетная зависимость для пеленга в плоскости  Y ССК;
Y ССК;
 - проекция дальности от антенны с индексом j до излучателя с индексом i на плоскость XZ ССК.
- проекция дальности от антенны с индексом j до излучателя с индексом i на плоскость XZ ССК.
Формула из (9) выбирается так, чтобы знаменатель не был близок к нолю. В формуле (10):

ближайший предшествующий момент времени, когда,  была неравна нолю.
была неравна нолю.
Могут применяться и другие тригонометрические формулы, связывающие стороны и углы треугольников, а также матрица (3), дополненная уравнением связи  Таким образом, приравнивая функции (8) и (10) измеренным РСН (2) значениям пеленгов на излучатели, получаем математические выражения, связывающие углы ориентации с углами пеленгов и координатами МУ и излучателей в ЗНСК, определенными РСН (2). Для двух приемных антенн на МУ и одного внешнего излучателя получается четыре уравнения связи. При этом для определения координат объекта по временным задержкам получения сигналов от излучателей и синхронизации его шкалы времени (ШВ) со шкалами времени излучателей обычно требуется не менее четырех излучателей. С другой стороны, для получения пеленгов на излучатели на объекте обычно нужно иметь не менее трех АЭ, не лежащих на одной прямой. Имеет место информационная избыточность. Это позволяет не только повысить точность определения углов ориентации (например, используя методы наименьших квадратов или наибольшего правдоподобия), но и практически исключить возможную фазовую неопределенность ([8, стр. 580] - «ГЛОНАСС. Принципы построения и функционирования». Справочное пособие. Изд. 4-е, перераб. и доп., под ред. Перова А.И. и Харисова В.Н., М., «Радиотехника», 2010 г.). Если расстояния между антеннами меньше половины длины волны несущей, фазовая неопределенность отсутствует.
Таким образом, приравнивая функции (8) и (10) измеренным РСН (2) значениям пеленгов на излучатели, получаем математические выражения, связывающие углы ориентации с углами пеленгов и координатами МУ и излучателей в ЗНСК, определенными РСН (2). Для двух приемных антенн на МУ и одного внешнего излучателя получается четыре уравнения связи. При этом для определения координат объекта по временным задержкам получения сигналов от излучателей и синхронизации его шкалы времени (ШВ) со шкалами времени излучателей обычно требуется не менее четырех излучателей. С другой стороны, для получения пеленгов на излучатели на объекте обычно нужно иметь не менее трех АЭ, не лежащих на одной прямой. Имеет место информационная избыточность. Это позволяет не только повысить точность определения углов ориентации (например, используя методы наименьших квадратов или наибольшего правдоподобия), но и практически исключить возможную фазовую неопределенность ([8, стр. 580] - «ГЛОНАСС. Принципы построения и функционирования». Справочное пособие. Изд. 4-е, перераб. и доп., под ред. Перова А.И. и Харисова В.Н., М., «Радиотехника», 2010 г.). Если расстояния между антеннами меньше половины длины волны несущей, фазовая неопределенность отсутствует.
Таким образом, по информации, сформированной на основании измерений радионавигационной части навигационной системы, определяются все три угла ориентации. При расчете этих углов используют только тригонометрические соотношения между расстояниями и углами, с конечной точностью измеренными РСН (2), поэтому систематическое нарастание (по модулю) ошибки определения углов ориентации отсутствует. Одновременно были определены линейные скорости и координаты МУ. При этом, как отмечено в [15, стр. 6] (Кинкулькин И.Е., Рубцов В.Д., Фабрик М.А. «Фазовый метод определения координат». - М.: «Сов. Радио», 1979 г.), в фазовых системах при точном измерении разности фаз существует возможность измерения расстояний с точностью до малых долей длины волны.
В интегрированном радиоинерциальном режиме работают одновременно как РСН (2), так и ИСН (4). Предполагается, что выходная информация из БСО (3) выдается вовне в земной нормальной СК. Использование иной СК потребителем (СКП) не меняет принципиально картины, а требует только использования других, но также широко известных зависимостей (см., например, [1], [4], [8], [13], [16]).
Порядок проведения коррекции углов ориентации ИСН достаточно подробно описан в, [2, стр. 14] - Патент РФ №2776856, МПК G01C 21/20, 2020 г. «Способы определения значений углов ориентации в процессе движения летательного аппарата и коррекции значений углов ориентации» и может быть распространен на акселерометры, магнитометры и другие типы датчиков, предназначенных для измерения прямо или опосредованно угловых или линейных координат (их производных). Он основан на том, что, поскольку известны значения углов ориентации, линейных скоростей и координат, полученные по результатам измерений как инерциальной, так и радионавигационной частей навигационной системы, их одноименные разности, приведенные в одну и ту же СК, могут (в простейшем случае) быть использованы для коррекции на очередном временном интервале измерений результатов определения углов ориентации (линейных координат) инерциальной частью навигационной системы. Также сами значения, полученные с использованием информации от РСН, могут применяться в качестве начальных значений при интегрировании или экстраполяции.
Процесс коррекции может периодически повторяться, причем для каждого канала темп может быть индивидуальным.
Как уже отмечалось, могут быть определены не только поправки к самим углам ориентации (линейным координатам), но и к их производным. По известным значениям углов ориентации (параметров с ними связанных) поправки к скоростям изменения углов ориентации могут быть однозначно пересчитаны в значения ненолей гиродатчиков [1, стр. 127, формула (3.29)] и/или ненолей акселерометров, используя при необходимости матрицу А, что в ряде случаев удобнее для построения решаемой системы уравнений.
Если углы ориентации (линейные координаты) в инерциальной части навигационной системы получают путем интегрирования производных их изменения, их коррекция может быть осуществлена изменением начальных условий в соответствующем интеграторе на момент ее проведения. При этом определенные РСН значения углов курса, тангажа, крена, а также линейных скоростей и координат устанавливаются как начальные условия соответственно в интеграторах углов курса, тангажа и крена, а также линейных ускорений и скоростей инерциальной части (возможно и добавление поправок на выходах интеграторов).
Возможны и другие комбинации описанных приемов.
Сравнение и совместная обработка параметров осуществляется в БСО (3). Один из возможных вариантов его построения приведен на фиг. 5. На фиг. 5 подразумевается, что координаты выдаются потребителю в ЗНСК. В БС (12) в многоканальном сумматоре (сумматорах) попарно сравниваются одноименные координаты, полученные из РСН (2) и ИСН (4). Так как предполагается получить медленно меняющиеся поправки, вычисленные разности пропускаются через фильтры низких частот. Также в необходимых случаях могут быть рассчитаны скорости изменения параметров за межкоррекционный период в соответствующих блоках деления или масштабирующих усилителях (если период постоянен). Как уже указывалось, сигналы из ИСН (4) в БСО (3) могут не выдаваться. В этом случае корректировка показаний ИСН (4) может осуществляться по данным РСН (2) после проведения необходимого пересчета координат. Нужно отметить, что и сами блоки БС (12) и ПК2(13) могут являться частью ИСН (4).
Поскольку на фиг. 3 интегрирование показано осуществляющимся в ССК, а поправки - вводимыми именно на интеграторы (7), то сигналы с выхода БС(12) поступают на вход ПК2(13). В преобразователе (13) координат осуществляется пересчет полученных поправок в СК, в которой они будут вноситься (для описываемого варианта - из ЗНСК в ССК). Например, если бы поправки добавлялись после ПК 1(8) с последующей экстраполяцией, то ПК2(13) был бы ненужен. В ФСОС (14) проводится совместная фильтрация сигналов, сформированных в РСН (2) и ИСН (4). Так как обе группы сигналов уже приведены к общей системе координат, фильтрация может быть проведена с помощью фильтра Калмана или фильтров аналогичных по структуре ([1, стр. 221, рис. 5.19] - Матвеев В.В., Распопов В.Я. «Основы построения бесплатформенных инерциальных навигационных систем» - СПб, ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009 г., [17, стр. 11, 12, 15 фиг.1] - Патент РФ №2745083, МПК GO 1С 23/00, 2020 г. «Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации»). При этом погрешность определения координат уменьшается до 3-5 раз и более. Следует отметить, что и в чисто инерциальном или радионавигационном режимах на выходе ФСОС (14) погрешность выходного сигнала после прохождения входных сигналов через структуру типа приведенной в [1, стр. 221, рис. 5.19] также уменьшается, хотя и не столь значительно. Это относится и к вариантам построения навигационной системы, когда сигналы ИСН (4) не выдаются в БСО (3).
Ввиду того, что информация о координатах на выходе ФСОС (14) уже приведена к СК потребителя, она может рассматриваться как выходной сигнал РИСН. По той же причине может потребоваться пересчет координат в ПКЗ (15) в СК, используемую в схемах (10) слежения РСН (2). Соответственно в этом случае выход преобразователя (15) координат может рассматриваться как выход БСО (3), предназначенный для передачи информации в РСН (2). Как уже отмечалось, эта связь не является обязательной, но ее наличие позволяет повысить точность и стабильность работы РИСН.
Следует также отметить, что в некоторых частных случаях [17, стр. 11, формула (13), фиг.1] на выходе ФСОС (14) могут быть получены все или некоторые осредненные значения рассогласований для одноименных сигналов РСН (2) и ИСН (4). В этом случае блок (12) сравнения может оказаться не нужен, но потребоваться связь между ФСОС (14) и ПК2 (13).
Как видно из описания работы РИСН (ее вариантов), при выполнении ее радионавигационной части способной выполнять фазовую пеленгацию создается предпосылка для определения всех трех углов ориентации без использования информации от ИСН. Таким образом, исключается возможность неограниченного нарастания (по модулю) ошибок определения углов ориентации. РСН при этом оказывается способной определять как линейные координаты (скорости, ускорения), так и углы ориентации МУ. Это позволяет произвести коррекцию показаний инерциальной части РИСН не только по углам ориентации как в прототипе, но и по линейным координатам, скорости, ускорению.
Вышеизложенное подтверждает решение задачи, заключающейся в повышении уровня автоматизации работы РИСН за счет определения углов ориентации в радионавигационном и интегрированном режимах без нарастающих со временем ошибок и проведения корректировок ИСН как в части угловых, так и линейных величин.
Как видно из приведенного выше, все необходимые измерения, расчеты и внесение поправок могут осуществляться автоматически без вмешательства человека, по крайней мере, до тех пор, пока в режиме ИСН ошибки не превысят допустимых значений. То есть допустимое время нахождения в инерциальном режиме работы может быть увеличено во столько же раз во сколько (по модулю) уменьшились наихудшие значения ошибок. Тем самым повышена автономность работы МУ, т.к. в меньшей степени требуется вмешательство оператора.
Дополнительными эффектами являются:
- снижение ошибок определения линейных координат РСН за счет применения фазовой пеленгации в идеале до единиц сантиметров по сравнению с единицами метров в прототипе;
- в среднем более точное определение углов ориентации, в том числе за счет исключения неограниченного нарастания ошибок при интегрировании ненолей гиродатчиков, и за счет этого более точный пересчет значений из СК ИСН в СК РСН и обратно;
- более точное определение рассогласования данных, получаемых от РСН и ИСН, как за счет более точного определения данных собственно РСН, так и за счет более точного пересчета координат из одной СК в другую и обратно;
- повышение точности коррекции ИСН за счет более точного определения рассогласования данных в СК, в которой осуществляется коррекция;
- при числе АЭ больше трех появляется возможность повышения помехозащищенности на 30 дБ и более за счет подавления сигнала АЭ, диаграмма направленности которого обеспечивает лучший прием сигнала помехи.
Рассмотрим более подробно способы коррекции инерциальной части РИСН. Как видно из описания работы устройства, эти способы разделяются на ряд подзадач:
а) определение углов пеленга на излучатели средствами РСН;
б) определение углов ориентации МУ средствами РСН;
в) коррекция углов ориентации (угловых скоростей, ускорений), выдаваемых ИСН, по результатам определения углов ориентации с помощью РСН;
г) приведение линейных координат (их производных), вырабатываемых ИСН и РСН, к единой СК;
д) расчет рассогласований между координатами ИСН и РСН, приведенными к единой СК;
е) пересчет рассогласований из единой СК в СК, в которой будут вводиться поправки в линейные координаты (их производные), рассчитанные на основании измерений, выполненных датчиками ИСН;
ж) коррекция линейных координат (их производных) рассчитанных на основании измерений датчиков ИСН.
Как говорилось выше, для определения углов ориентации предложено руководствоваться знанием углов пеленга от АЭ на излучатель, линейных координат излучателя и МУ. В качестве прототипа рассмотрен способ определения ориентации с помощью РСН ([8, стр. 77-79, рис. 4.4] - «ГЛОНАСС. Принципы построения и функционирования». Справочное пособие. Изд. 4-е, перераб. и доп., под ред. Перова А.И. и Харисова В.Н., М., «Радиотехника», 2010 г.). При реализации этого способа на известном расстоянии друг от друга на МУ устанавливают по крайней мере две приемных антенны РСН. Радиопередатчики (излучатели) спутников выдают свои координаты в геоцентрической СК. Поэтому формируется система уравнений, связывающая расстояние между антеннами и их координатами в геоцентрической СК со значениями направляющих косинусов в этой же СК для прямых, связывающих положения антенн. Определяют дальности (например по временным задержкам) от антенн до излучателя с известными координатами в геоцентрической СК, находят разности фаз несущей на антеннах. Формируют уравнение связи угла пеленга с одной из антенн на излучатель с разностью фаз несущей этого излучателя на приемных антеннах и расстоянием между этими антеннами. Определяют в приемнике сигнала антенны значения направляющих косинусов на излучатель. Проводят эту процедуру еще для двух излучателей при тех же приемных антеннах. Формируют систему из трех линейных уравнений с тремя неизвестными направляющими косинусами и решают ее.
Недостатками описанного способа является то, что в явном виде углы ориентации не формируются. Требуется решать проблему фазовой неопределенности. Принцип определения в приемнике значений направляющих косинусов в пеленге на излучатель не раскрыт.О возможности одновременно с углами ориентации определять линейные координаты и скорости МУ не указано, также как и о способе коррекции инерциальной части.
Задачей предлагаемого технического решения в части способа определения углов ориентации является повышение уровня автоматизации работы РИСН.
Достигается это за счет определения углов ориентации в радионавигационном и интегрированном режимах без нарастающих со временем ошибок и использования при этом одновременно определяемых РСН линейных координат и, при необходимости, скоростей.
Данная задача решается за счет того, что в способ определения углов ориентации, заключающийся в том, что используют не менее трех радиоизлучателей, координаты которых известны или могут быть определены, исходя из сигнала, ими излучаемого, а на мобильном устройстве с РСН устанавливают не менее двух приемных антенн, координаты которых в ССК относительно МУ известны, и при этом определяются дальности (псевдодальности) от антенн до излучателей и углы пеленга со стороны антенн на излучатели, дополнен операциями определения координат приемных антенн в системе координат потребителя, исходя из полученных дальностей (псевдодальностей), формирования зависимостей пересчета этих координат и координат излучателей в ССК МУ через углы ориентации (параметры от них зависящие), формирования зависимостей углов пеленга со стороны антенн на излучатели, исходя из их координат в ССК МУ и определения углов ориентации путем решения системы уравнений, связывающих расчетные углы пеленгов с аналогичными углами, определенными непосредственно, при этом, используя информационную избыточность, решение осуществляют, применяя, например, метод наименьших квадратов или максимального правдоподобия или оптимизацию с использованием иных критериев.
Применение предлагаемого способа определения углов ориентации осуществляется в следующем порядке. Радионавигационная часть РИСН находит сигналы излучателей, формируя «созвездие» из четырех и более из них, находящихся в зоне уверенного приема, по крайней мере, двух антенн. Схемы слежения РСН обеспечивают подстройку каналов на частоты излучения с учетом доплеровского смещения и временных задержек. По временным и фазовым задержкам рассчитываются линейные координаты антенн МУ в системе координат потребителя (обычно ЗНСК). Также в СК потребителя пересчитываются координаты излучателей, (для данного решения в явном виде не используются параллельно получаемые значения линейных скоростей по доплеровским смещениям частоты, но их использование при совместной фильтрации с координатами излучателей и МУ помогает уменьшить погрешность определения координат в РСН, а знание частотных смещений - уточнить фазовые).
Поскольку на момент взятия пеленгов на излучатели взаимная привязка антенн (антенных элементов) была выполнена в ССК, в ту же СК следовало бы для осуществления сравнения перевести и линейные координаты излучателей. Но в уравнения преобразователя координат из ЗНСК в ССК (см. матрицу А) входят еще неопределенные углы ориентации МУ (параметры с ними связанные). Поэтому можно сформировать систему уравнений, выражающую пеленги от АЭ в направлении излучателей через их координаты в ССК и углы ориентации (параметры с ними связанные). Эти выражения приравниваются измеренным значениям пеленгов. Для решения системы уравнений необходимо иметь три независимых уравнения, но от одной антенны в сторону одного излучателя можно определить только два пеленга, а добавление еще хотя бы одной антенны уже делает систему уравнений избыточной. С другой стороны, как уже отмечалось, для определения линейных координат и привязки ШВ необходимо иметь не менее четырех излучателей или дополнительную информацию о положении МУ. Выбор из общего количества возможных уравнений тех независимых трех, решение которых даст наименьшие ошибки определения углов ориентации возможно, например, методом перебора с последующей оценкой полученных результатов внутри области Парето. Применение вариационных методов, например, минимальных квадратов или наибольшего правдоподобия позволяет решить задачу с меньшими вычислительными затратами, так как не требуется решать все возможные сочетания троек уравнений. В литературе ([18, стр. 287] - «Глобальная спутниковая радионавигационная система ГЛОНАСС». Справочное пособие, под ред. В.Н. Харисова, А.И.Перова, В.А. Болдина, М., ИПРЖР, 1998 г.) указывается, что избыточные измерения расширяют окрестность вокруг искомого решения, в которой отсутствуют другие возможные решения. Т.е. область фазовой неопределенности сужается. Кроме того, в соответствии с известной зависимостью для оценки матожидания случайной величины погрешность уменьшается пропорционально корню квадратному от числа первичных (сырых) оценок. Например, если рассмотреть случай с четырьмя излучателями и двумя антеннами, то можно получить восемь оценочных уравнений при том, что достаточно трех. Число возможных неповторяющихся сочетаний  равно 56. Ожидаемое повышение точности определения углов ориентации за счет избыточности информации - 7,4 раза. В той же пропорции после обратного пересчета вырастет точность оценки пеленгов от антенн в направлении излучателей. Одновременно растет точность измерения дальностей до излучателей (фазовая неопределенность в 360° соответствует погрешности в измерении дальности на единицу длины волны несущей излучателя). Если фазовая неопределенность становится меньше половины длины волны можно считать, что она исключена. Например, при длине волны несущей 0,2 м и погрешности определения координат без применения фазового метода в 5 м уже введение в «созвездие» пятого излучателя при применении фазовой пеленгации погрешность измерения дальности становится меньше 0,1 м. При этом все операции осуществляются автоматически, а для восстановления радионавигационного режима в случае его перерыва вмешательство человек-оператора не требуется.
равно 56. Ожидаемое повышение точности определения углов ориентации за счет избыточности информации - 7,4 раза. В той же пропорции после обратного пересчета вырастет точность оценки пеленгов от антенн в направлении излучателей. Одновременно растет точность измерения дальностей до излучателей (фазовая неопределенность в 360° соответствует погрешности в измерении дальности на единицу длины волны несущей излучателя). Если фазовая неопределенность становится меньше половины длины волны можно считать, что она исключена. Например, при длине волны несущей 0,2 м и погрешности определения координат без применения фазового метода в 5 м уже введение в «созвездие» пятого излучателя при применении фазовой пеленгации погрешность измерения дальности становится меньше 0,1 м. При этом все операции осуществляются автоматически, а для восстановления радионавигационного режима в случае его перерыва вмешательство человек-оператора не требуется.
Вышеописанное показывает, что для способа определения углов ориентации (параметров с ними связанных) заявленная задача, заключающаяся в повышении уровня автоматизации работы РИСН за счет определения углов ориентации в радионавигационном и интегрированном режимах без нарастающих со временем ошибок и использования при этом одновременно определяемых РСН линейных координат и, при необходимости, скоростей решена.
Углы ориентации МУ (курс, тангаж, крен) получаются в явном виде относительно осей ЗНСК. Зависимости, используемые при определении углов ориентации, не содержат членов, погрешности которых нарастают (по модулю) со временем. Соответственно и определение углов ориентации производится с ограниченными ошибками. При этом влияние фазовой неопределенности при решении задачи уменьшается и повышаются в семь и более раз точности вычисления углов ориентации за счет использования информационной избыточности. Одновременно улучшается точность определения линейных координат.
Получение решений для углов ориентации, погрешность которых не возрастает неограниченно со временем, уже само по себе дает возможность осуществления коррекции измерений, произведенных гироскопическими датчиками ИСН. По мнению заявителя, во многом аналогичные технические решения описаны в [2, пп. 5 и 6 формулы изобретения] - Патент РФ №2776856, МПК G01C 21/20, 2020 г. «Способы определения значений углов ориентации в процессе движения летательного аппарата и коррекции значений углов ориентации», которые рассматриваются как прототипы для способов коррекции параметров состояния, формируемых на базе измерений, производимых гироскопическими датчиками ИСН. Эти способы характеризуются следующим.
В обоих пунктах формулы изобретения [2, пп. 5 и 6] углы ориентации определяются с использованием линейных скоростей движения в ЗНСК, текущей высоты, а для угла крена и с применением тестового маневра. Линейные скорости определяются по показаниям радионавигационной части РИСН. Для определения углов курса и тангажа также требуется получение углов скольжения и атаки.
В п. 5 формулы изобретения [2] предлагается коррекцию в процессе движения летательного аппарата (мобильного устройства) значений углов ориентации, формируемых инерциальной частью его навигационной системы периодически сравнивать со значениями углов ориентации, полученных на базе информации, формируемой радионавигационной частью его навигационной системы, а полученные разности использовать для формирования на очередном интервале времени корректирующих воздействий на углы ориентации, формируемые инерциальной частью навигационной системы.
В п. 6 формулы изобретения [2] в отличие от п. 5 первоначально угловые скорости, измеренные в ССК инерциальной частью РИСН, пересчитывают в скорости изменения углов ориентации, используя углы курса и тангажа, например, по методу Эйлера-Крылова, при этом скорости изменения углов ориентации интегрируют, и используют альтернативные значения углов ориентации ЛА, полученные с использованием информации от радионавигационной части РИСН, для изменения начальных условий интегрирования на очередном интервале времени, в течение которого корректирующие поправки сохраняются.
Недостатками этих способов является ограниченная применимость (только на движущихся ЛА (гидропланах, судах на подводных крыльях)), необходимость осуществления тестового маневра для определения угла крена, необходимость определения значений углов скольжения и атаки для определения углов курса и тангажа. Темп обновления углов ориентации, рассчитываемых с использованием информации от РСН, невысокий (особенно по углу крена). Соответственно, имеют место достаточно высокие погрешности определения углов ориентации (до нескольких угловых градусов).
Задачей, решаемой предлагаемой группой технических решений, является повышение возможного темпа (частоты повторения) коррекции углов ориентации, формируемых на базе информации ИСН, и, как следствие, линейных координат в чисто инерциальном и интегрированном режимах работы РИСН.
Достигается это за счет повышения в среднем точности определения углов ориентации в чисто радионавигационном и интегрированном режимах работы РИСН.
Решение задачи достигается за счет того, что способ коррекции показаний ИСН в части углов ориентации, заключающийся в том, что инерциальная часть навигационной системы измеряет угловые скорости в связанной системе координат МУ, на их основе формируют углы ориентации (параметры с ними связанные), с помощью радионавигационной части навигационной системы определяют в СКП высоты антенн МУ, с учетом этих значений и плоскостных координат антенн МУ определяют альтернативные углы ориентации (параметры с ними связанные), периодически сравнивают значения углов ориентации (параметров с ними связанных), полученных на базе информации от ИСН и РСН, а вычисленные разности используют для формирования на очередном интервале времени корректирующих воздействий для углов ориентации (параметров с ними связанных), формируемых инерциальной частью навигационной системы, изменен таким образом, что с помощью РСН определяют в СКП также плоскостные координаты антенн МУ и пеленги относительно антенн МУ на радиоизлучатели, а альтернативные углы ориентации МУ (параметры с ними связанные) рассчитывают по полученным от РСН координатам антенн и пеленгам относительно них на излучатели.
Задача решается и в том случае, когда способ коррекции показаний ИСН в части углов ориентации, заключающийся в том, что инерциальная часть навигационной системы измеряет угловые скорости в ССК МУ, на их основе формируют углы ориентации (параметры с ними связанные) для чего угловые скорости, измеренные ИСН в ССК, пересчитывают в скорости изменения углов ориентации (параметры с ними связанные), скорости изменения углов ориентации (параметры с ними связанные) интегрируют, с помощью радионавигационной части навигационной системы определяют в СКП высоты антенн МУ, с учетом этих значений и плоскостных координат антенн МУ определяют альтернативные углы ориентации (параметры с ними связанные), альтернативные значения углов ориентации МУ (параметров с ними связанных), полученные по данным РСН, используют для изменения начальных условий интегрирования на очередном интервале времени, в течение которого корректирующие поправки сохраняются, изменен таким образом, что с помощью РСН определяют в СКП также плоскостные координаты антенн МУ и пеленги относительно антенн МУ на радиоизлучатели, а альтернативные углы ориентации МУ (параметры с ними связанные) рассчитывают по полученным от РСН координатам антенн и пеленгам относительно них на излучатели.
Работа РИСН при использовании предлагаемых способов коррекции углов ориентации, вырабатываемых ИСН, заключается в следующем. РСН определяет пеленги со стороны антенн на излучатели, линейные координаты антенн и излучателей в СКП и на основании этих данных рассчитывает углы ориентации МУ. ИСН определяет угловые скорости, например в ССК МУ. На основании этих скоростей (см., формулы (2), (5), (6)), могут быть определены связанные с угловыми скоростями параметры, на их базе рассчитаны углы ориентации. Вычитая из альтернативных углов ориентации (параметров с ними связанных) углы (параметры с ними связанные), полученные с использованием информации от ИСН, формируют корректирующие воздействия, которые добавляют к углам ориентации (параметрам с ними связанными), полученным на основании данных ИСН. Для проведения коррекции желательно, чтобы величины, сравниваемые друг с другом, различались более, чем на шумовую полосу. Соответственно, повышение точности определения углов ориентации за счет применения методов фазовой пеленгации с присущей ей, как было показано, информационной избыточностью сужает шумовые полосы определяемых с использованием данных РСН углов ориентации. Это позволяет проводить коррекцию углов ориентации, рассчитываемых по данным ИСН чаще, в результате в среднем в комплексированном режиме и в начале инерциального режима на выходе ИСН формируются более точные их значения.
Модифицированный способ, который может быть применен, когда угловые скорости (параметры с ними связанные), измеренные ИСН, интегрируются, отличается тем, что поправки не рассчитываются, а альтернативные углы (параметры с ими связанные) при проведении коррекции подставляются в интеграторы как обновленные начальные условия.
В том же источнике [2, стр. 14] - Патент РФ №2776856, МПК GO1С 21/20, 2020 г. «Способы определения значений углов ориентации в процессе движения летательного аппарата и коррекции значений углов ориентации», указано, что по известным углам ориентации поправки к скоростям изменения углов ориентации могут быть однозначно пересчитаны в значения ненулей гиродатчиков с учетом [1, стр. 127, формула (3.29)] (Матвеев В.В., Распопов В.Я. «Основы построения бесплатформенных инерциальных навигационных систем» - СПб, ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009 г.). В формуле изобретения [2] этот вариант коррекции не нашел отражения, так как потребовалось бы показать, каким образом формируются уточненные производные от углов ориентации в СКП. Недостатки этого способа такие же, как у приведенных в пп. 5, 6 формулы изобретения [2].
Задачей, решаемой предлагаемым способом, является повышение в среднем точности определения линейных координат в чисто инерциальном и интегрированном режимах работы РИСН.
Достигается это за счет повышения точности определения углов ориентации.
Это достигается за счет того, что в способ коррекции показаний ИСН в части углов ориентации, заключающийся в том, что по известным углам ориентации (параметрам от них зависящим) поправки к скоростям изменения углов ориентации пересчитывают из СКП в значения ненулей гиродатчиков в их измерительной системе координат, например ССК МУ или СК с повернутыми относительно нее на произвольные углы осями, добавляют операции формирования поправок и изменения выдаваемых гиродатчиками угловых скоростей в измерительной системе координат. При этом для определения углов ориентации используют РСН с фазовой пеленгацией.
Работа РИСН при реализации указанного способа осуществляется следующим образом. ИСН и РСН так же, как указывалось выше, формируют углы ориентации МУ. Производится совместная фильтрация параметров состояния (углов и их производных). При этом, как указано в [17, стр. 11, формула (13)] (Патент РФ №2745083, МПК G01C 23/00, 2020 г. «Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации»), в процессе совместной фильтрации формируются не только сами углы, но и их производные и неноли этих производных. Осуществляется пересчет поправок (значений ненолей, получаемых в процессе совместной фильтрации), в измерительные СК гиродатчиков (ИСКГ), например в последовательности СКП→ЗНСК→ССК→ИСКГ. Пересчитанные в измерительные СК гироскопов поправки в совместном (интегрированном) режиме работы добавляются к измеренным значениям угловых скоростей. Полученные откорректированные значения скоростей в соответствии с выбранным алгоритмом (последовательностью действий) пересчитывают в величины, необходимые потребителю. Перед переходом в чисто инерциальный режим работы поправки запоминаются. Запомненные значения поправок используются для корректировки измеряемых значений угловых скоростей до тех пор, пока не восстановится совмещенный режим работы или не будет запрещена работа инерциальной части, или не завершится рейс МУ. Такой способ коррекции может применяться как независимо, так и в совокупности с введением обновляемых начальных условий в интеграторы, на входы которых поступают угловые скорости (параметры от них зависящие).
Темп выдачи сигналов с датчиков ИСН обычно выше (200 Гц и более) чем получаемых от РСН (обычно не выше 10 Гц). В связи с тем, что в результате осуществления периодических (в пределе с частотой обновления информации РСН) корректировок ИСН точность выдаваемых ей углов ориентации улучшается, то, по крайней мере, на интервалах времени, в пределах которых информация от РСН не обновляется (или обновляется за счет экстраполяции), свежая информация на выходе РИСН фактически определяется углами ориентации, формируемыми на базе информации ИСН. При этом среднее значение ошибок на интервале уменьшается. Причем за счет совместной обработки сигналов ИСН и РСН погрешности становятся меньше, чем в чисто радионавигационном режиме. Кроме того, для пересчета данных используются углы ориентации, определенные с использованием фазовой пеленгации, вычисляемые с более высокой точностью, чем в прототипе. Поскольку в отличие от прототипа не требуется знать углы скольжения и атаки, выполнять тестовый маневр, потенциально темп проведения коррекции ИСН может быть повышен. Таким образом, обеспечивается решение поставленной задачи повышения в среднем точности определения линейных координат в чисто инерциальном и интегрированном режимах работы РИСН за счет повышения точности определения углов ориентации.
По аналогии с написанным про корректировку вырабатываемых ИСН углов ориентации может решаться и задача корректировки линейных ускорений, скоростей и координат, выдаваемых ИСН.
В [8, стр. 663, рис. 17.10] («ГЛОНАСС. Принципы построения и функционирования». Справочное пособие. Изд. 4-е, перераб. и доп., под ред. Перова А.И. и Харисова В.Н., М., «Радиотехника», 2010 г.) показана корректировка выходных сигналов гироскопов в СКП. Она осуществляется путем добавки поправок к выходным сигналам ИСН. По мнению заявителя, этот способ может рассматриваться как прототип одного из возможных вариантов осуществления коррекции линейной составляющей сигналов ИСН.
Задачей группы предлагаемых решений является повышение уровня автоматизации работы РИСН.
Достигается это за счет повышения точности выдаваемых ИСН координат.
Решение указанной задачи может быть получено, если способ коррекции показаний ИСН в части линейных координат, скоростей, ускорений, заключающийся в том, что из параметров вектора состояния (координат, скоростей, ускорений), выработанных на базе показаний акселерометров ИСН, в общей для групп сигналов СК вычитаются поправки, сформированные с учетом альтернативных значений одноименных параметров, выработанных с учетом результатов измерений РСН, добавляются операции пересчета показаний акселерометров из их измерительной СК (ИСКА), а также линейных скоростей и координат, сформированных на их основе, а также аналогичных параметров состояния, полученных на основании работы РСН, в одну и ту же СК, а для получения поправок вычитают из полученных после пересчета в общую СК параметров состояния на основе информации ИСН соответствующие параметры состояния на основе информации РСН.
Задача также может быть решена, если способ коррекции показаний ИСН в части линейных координат, скоростей, ускорений, заключающийся в том, что из параметров вектора состояния (координат, скоростей, ускорений), выработанных на базе показаний акселерометров ИСН, в общей для групп сигналов СК вычитаются поправки, сформированные с учетом альтернативных значений одноименных параметров, выработанных с учетом результатов измерений РСН, добавляются операции пересчета показаний акселерометров из их измерительной СК, а также линейных скоростей и координат, сформированных на их основе, а также аналогичных параметров состояния, полученных на основании работы РСН, в одну и ту же СК, проводят совместную фильтрацию двух вариантов параметров состояния, а для получения поправок вычитают из полученных после пересчета в общую СК параметров состояния на основе информации ИСН соответствующие параметры состояния, полученные по результатам совместной фильтрации.
По аналогии с [2, п. 6 формулы изобретения] (Патент РФ №2776856, МПК G01C 21/20, 2020 г. «Способы определения значений углов ориентации в процессе движения летательного аппарата и коррекции значений углов ориентации»), где для коррекции результатов определения параметров состояния, сформированных на базе информации от инерциальной части его навигационной системы, используется введение обновляемых начальных условий на интеграторы, можно организовать коррекцию линейных координат, скоростей, ускорений.
В данном случае решение задачи, указанный выше, достигается за счет того, что с помощью инерциальной части навигационной системы измеряют показания акселерометров в их ИСКА, двукратно интегрируя, формируют на их основе линейные скорости и координаты, для осуществления коррекции параметров состояния, определенных на базе информации, получаемой ИСН, применяют для изменения начальных условий интегрирования на очередном интервале времени, в течение которого корректирующие поправки сохраняются соответствующие линейные координаты и скорости, полученные с использованием информации, получаемой РСН, а перед проведением коррекции оба варианта параметров состояния пересчитывают в одну и ту же СК.
Технический результат достигается и в том случае, когда скорости и координаты, используемые для изменения начальных условий, формируют в процессе совместной фильтрации двух вариантов параметров состояния.
Как уже указывалось, в [17, стр. 11, формула (13)] (Патент РФ №2 745 083, МПК GO 1С 23/00, 2020 г. «Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации»), показано, что в процессе совместной фильтрации формируются не только сами координаты, но и их производные и неноли этих производных. Соответственно технический результат достигается и в том случае, когда поправки для младшей производной формируются в процессе совместной фильтрации параметров состояния.
В этом случае работа в РИСН способов коррекции линейных координат, скоростей, ускорений, вырабатываемых на основе информации ИСН, осуществляется следующим образом. В процессе изменения ориентации и/или координат МУ его эволюции для обеспечения автономного движения в соответствии с заданием должны отслеживаться и, по возможности, учитываться. Ранее указывалось, что РИСН реализует три режима работы: радионавигационный, инерциальный и комплексированный (интегрированный, совмещенный). Как было показано, в радионавигационном режиме можно определить как координаты и линейные скорости, так и углы ориентации. При этом погрешности их определения конечны. В инерциальном режиме при наличии в ИСН акселерометров и гироскопических датчиков также можно вычислять линейные и угловые величины, но погрешности и тех и других со временем будут возрастать (по модулю). Поэтому в совместном режиме работы необходимо вычислить поправки для коррекции ИСН и в случае перехода в инерциальный режим запоминать эти поправки использовать их во время его течения.
Работа при осуществлении способов корректировок углов ориентации, вырабатываемых с использованием информации, получаемой с помощью ИСН, была описана ранее. Описание работы при осуществлении способов корректировок линейных ускорений, скоростей, координат дается ниже.
Пусть акселерометры ИСН (три и более), установленные на МУ, вырабатывают сигналы псевдоускорений в направлениях непараллельных друг другу (в осях ИСКА). Ускорения, соответствующие каждому из сигналов, могут быть разложены на направления осей ССК МУ и просуммированы с соответствующими коэффициентами в каждом из ортогональных направлений осей ССК МУ. Таким образом, производится преобразование координат из ИСКА в ССК МУ для сигналов акселерометров ИСН. Дальнейшее интегрирование и учет ускорения силы тяжести могут производиться как в ССК МУ, так и в ЗНСК или другой СКП. Если РСН определяет одновременно (интегрированный режим работы) с ИСН линейные координаты и скорости (ускорения могут быть оценены по изменениям линейных скоростей на заданных интервалах времени), то, зная углы ориентации и другую необходимую информацию, имеется возможность пересчитать параметры состояния, полученные с использованием информации от РСН, в другие СК. Аналогично, для проведения сравнения в те же СК должны быть пересчитаны параметры состояния, полученные с использованием информации от ИСН. Чтобы уменьшить влияние перекрестных связей желательно, по крайней мере, поправки для акселерометров рассчитывать в ИСКА. Наиболее очевидным способом получения поправок является попарное вычитание друг из друга значений одноименных параметров состояния (например линейных скоростей в направлении оси X), полученных разными вариантами. Соответственно учет поправок производится их добавлением (вычитанием) к значениям параметров состояния, полученных с использованием информации от ИСН, пересчитанным в ту же СК, в которой были вычислены поправки.
При переходе в чисто инерциальный режим работы поправки запоминаются до конца действия этого режима. Поэтому в начале режима погрешности выдаваемых ИСН параметров состояния будут не хуже, чем были погрешности параметров состояния радионавигационной части РИСН при выходе из совмещенного режима. Это увеличивает допустимую продолжительность нахождения в инерциальном режиме и, как следствие, из-за того, что для достижения тех же предельных величин потребуется большее время, средняя величина погрешностей ИСН (по модулю) на интервале работы уменьшится.
Как уже говорилось, в интегрированном режиме работы проводится совместная обработка сигналов ИСН и РСН. Это позволяет повысить точность выдаваемых после фильтрации сигналов как по сравнению с ИСН, так и РСН. Поэтому, если использовать для расчета поправок сигналы, соответствующие параметрам состояния на выходе фильтра, точность их вычисления повысится. Поэтому после использования уточненных значений поправок имеет место дальнейшее увеличение допустимого времени работы ИСН.
Линейные скорости и координаты по информации ИСН получают интегрированием. Соответственно, выходной сигнал с интегратора становится точнее и тогда, когда начальные условия для интегрирования становятся точнее. В частности, когда при работающей РСН в качестве начальных условий в интеграторы ИСН устанавливаются соответствующие значения, полученные с учетом информации, вырабатываемой РСН. Необходимым условием такой подстановки является соответствие друг другу систем координат, в которых работают интеграторы и вычисляются начальные условия. При отключении РСН начальные условия на интеграторах ИСН сохраняются. Аналогично вышеописанному точность определения начальных условий может быть повышена, если провести совместную фильтрацию параметров состояния, полученных с использованием данных ИСН и РСН.
Выше по тексту уже указывалось, что при совместной фильтрации могут быть получены неноли младших производных параметров состояния. В рассматриваемом случае это линейные ускорения. Поправки к показаниям акселерометров лучше вводить в ИСКА, но поправки также могут вводиться и в других СК. Такой способ может использоваться как самостоятельно, так и дополнительно к способам, при которых изменяются начальные условия в интеграторах.
Как ясно из вышеизложенного, вмешательство человека-оператора в процесс работы становится необходимым только тогда, когда накапливающиеся в инерциальном режиме ошибки превысят предельные уровни. Но за счет предложенных методов коррекции остаточные значения ненулей акселерометров были уменьшены. Поэтому после перехода в инерциальный режим накопление ошибок в скоростях и координатах будет идти медленнее. Допустимое время нахождения в этом режиме увеличится. Таким образом, поставленная задача повышения уровня автоматизации работы РИСН за счет повышения точности выдаваемых ИСН координат решается во всех предложенных вариантах коррекции линейных ускорений, скоростей, координат, вырабатываемых с использованием информации ИСН.
Дополнительный выигрыш в точности получается в результате проведения параллельно коррекции и совместной обработки углов ориентации, так как в результате растет точность пересчета систем координат. С другой стороны, более точное знание координат положения антенн позволяет точнее определять углы ориентации средствами РСН.
Получение с помощью РИСН и линейных, и угловых параметров состояния обеспечивает автоматизацию работы РИСН, когда его радионавигационная часть работоспособна, и повышенную длительность работы его инерциальной части, когда по тем или иным причинам выдаваемая РСН информация недостоверна.
Таким образом, задача для группы предлагаемых технических решений выполнена.
Заявленные технические результаты достигаются.
При этом не требуется расширения аппаратурного состава навигационной системы.
В качестве дополнительного технического результата достигается пассивный (полуактивный при приеме информации радионавигационной частью) режим ее работы.
Единство творческого замысла подтверждается тем, что:
- в предложенных вариантах исполнения систем навигации для коррекции показаний ИСН используются вышеописанные способы коррекции линейных координат и их производных, а также углов ориентации (параметров с ними связанных) и их производных;
- при реализации предложенного способа определения углов ориентации используется метод фазовой пеленгации, как это указано при описании навигационных систем;
- при реализации предложенных способов коррекции показаний ИСН в части углов ориентации (параметров с ними связанных) и их производных могут применяться альтернативные значения углов, получаемые с использованием заявляемого способа;
- при реализации предложенных способов коррекции показаний ИСН в части линейных координат и их производных могут применяться значения углов ориентации (параметров с ними связанных), получаемые с использованием заявляемого способа;
- при реализации предложенных способов коррекции показаний ИСН в части линейных координат и их производных могут применяться значения углов ориентации (параметров с ними связанных), получаемые с использованием предлагаемого способа коррекции показаний ИСН в части углов ориентации;
- при реализации предложенных способов коррекции показаний ИСН в части углов ориентации (параметров с ними связанных) и их производных могут применяться показания ИСН в части линейных координат и их производных, получаемые по предлагаемому способу коррекции показаний инерциальной части РИСН.
Каждое из представляемых технических решений по совокупности существенных признаков является новым и технически реализуемым.
ИСТОЧНИКИ ИНФОРМАЦИИ
1. Матвеев В.В., Распопов В.Я. «Основы построения бесплатформенных инерциальных навигационных систем» - СПб, ГНЦ РФ ОАО «Концерн «ЦНИИ «Электроприбор», 2009 г. - 280 с.
2. Патент РФ №2776856, МПК G01C 21/20, 2020 г. «Способы определения значений углов ориентации в процессе движения летательного аппарата и коррекции значений углов ориентации».
3. Патент РФ №2273826, МПК G01C 21/24, GO IS 5/02, 2004 г.
4. ГОСТ 20058-80. Динамика летательных аппаратов в атмосфере. Термины, определения и обозначения.
5. «Разработка управляющих программ промышленных роботов». Курс лекций, - Минск, Белорусский государственный университет информатики и радиоэлектроники, 2008 г. - 131 с. https://www.bsuir.by/rn/12_113415_1_70397.pdf
6. Антонец Е.В., Кочергин В.И., Федосеева Г.А. «Приборное оборудование воздушных судов и его летная эксплуатация». Учебное пособие, г. Ульяновск, УВАУ ГА, 2014 г. - 62 с. http://venec.ulstu.ru/lib/disk72015/Antonets_2.pdf 3
7. Патент РФ №2276384, МПК G01S 5/00, 2004 г.
8. «ГЛОНАСС. Принципы построения и функционирования». Справочное пособие. Изд. 4-е, перераб. и доп., под ред. Перова А.И. и Харисова В.Н., М., «Радиотехника», 2010 г. - 800 с.
9. Егорушкин А.Ю., Мкртчян В.И. «Коррекция углов ориентации в бесплатформенных инерциальных навигационных системах». Инженерный журнал: наука и инновации, 2017 г., вып.8. http://dx.doi.org/10.18698/2308-6033-2017-8-1664
10. Кучерявый А.А. «Бортовые информационные системы»: Курс лекций под. ред. В.А. Мишина и Г.И. Клюева. - 2-е изд., перераб. и доп. - Ульяновск: УлГТУ, 2004 г. - 504 с.
11. Банков СЕ. «Антенны спутниковых навигаторов», М.: Издательство «Перо», 2014 г.
12. ГОСТ 32453-2013 «Глобальная навигационная спутниковая система. Системы координат. Методы преобразований координат определяемых точек».
13. Матвеев В.В. «Инерциальные навигационные системы», учебное пособие, г. Тула, издательство ТулГУ, 2012 г. - 199 с.
14. Функция ATAN2. http://old.exponenta.ru/soft/MATLAB/potemkiri/book2/chapter6/contens.asp.
15. Кинкулькин И.Е., Рубцов В.Д., Фабрик М.А. «Фазовый метод определения координат». - М.: «Сов. Радио», 1979 г. - 280 с.
16. Драницына Е.В. «Калибровка измерительного модуля прецизионной БИНС на волоконно-оптических гироскопах». Диссертация на соискание ученой степени кандидата технических наук, - СПб., Санкт-Петербургский национальный исследовательский университет информационных технологий, механики и оптики, 2016 г. - 89 с.
17. Патент РФ №2745083, МПК GO1C 23/00, 2020 г. «Способы формирования данных об ориентации объекта и навигационный комплекс летательного аппарата для их реализации».
18. «Глобальная спутниковая радионавигационная система ГЛОНАСС». Справочное пособие. Под ред. В.Н. Харисова, А.И. Перова, В.А. Болдина, М., ИПРЖР, 1998 г. - 400 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способы определения значений углов ориентации в процессе движения летательного аппарата и коррекции значений углов ориентации | 2020 |
|
RU2776856C2 |
| КОМПЛЕКС НАЧАЛЬНОЙ ВЫСТАВКИ ИНЕРЦИАЛЬНОЙ СИСТЕМЫ | 2003 |
|
RU2238522C1 |
| СПОСОБ ИНЕРЦИАЛЬНО-СПУТНИКОВОЙ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2536768C1 |
| КОМПЛЕКСНЫЙ СПОСОБ НАВИГАЦИИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2014 |
|
RU2558699C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОЙ ОРИЕНТАЦИИ РАКЕТЫ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ "СОЮЗ-2" | 2019 |
|
RU2732520C1 |
| ИНЕРЦИАЛЬНО-РАДИОНАВИГАЦИОННАЯ СИСТЕМА | 2013 |
|
RU2539846C1 |
| Астроинерциальная навигационная система с коррекцией по гравитационному полю Земли | 2023 |
|
RU2820600C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2015 |
|
RU2592715C1 |
| АСТРОНАВИГАЦИОННАЯ СИСТЕМА | 2014 |
|
RU2607197C2 |
| Способ высокоточного определения навигационных элементов движения судна | 2016 |
|
RU2643072C2 |
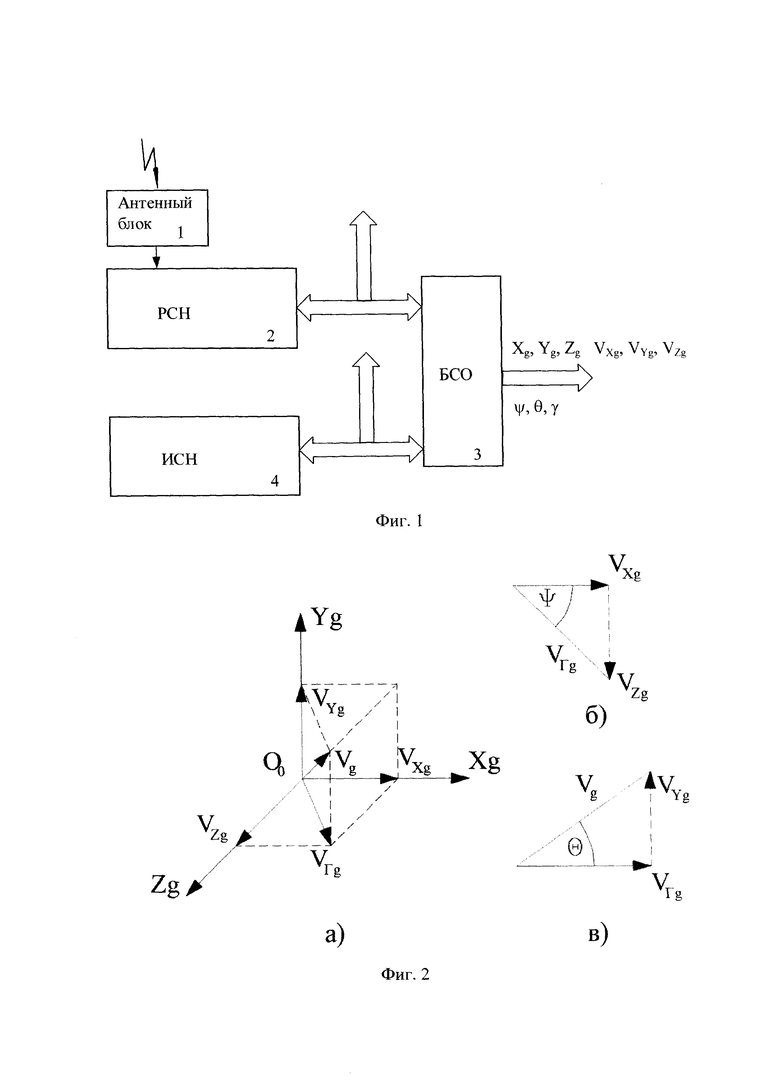
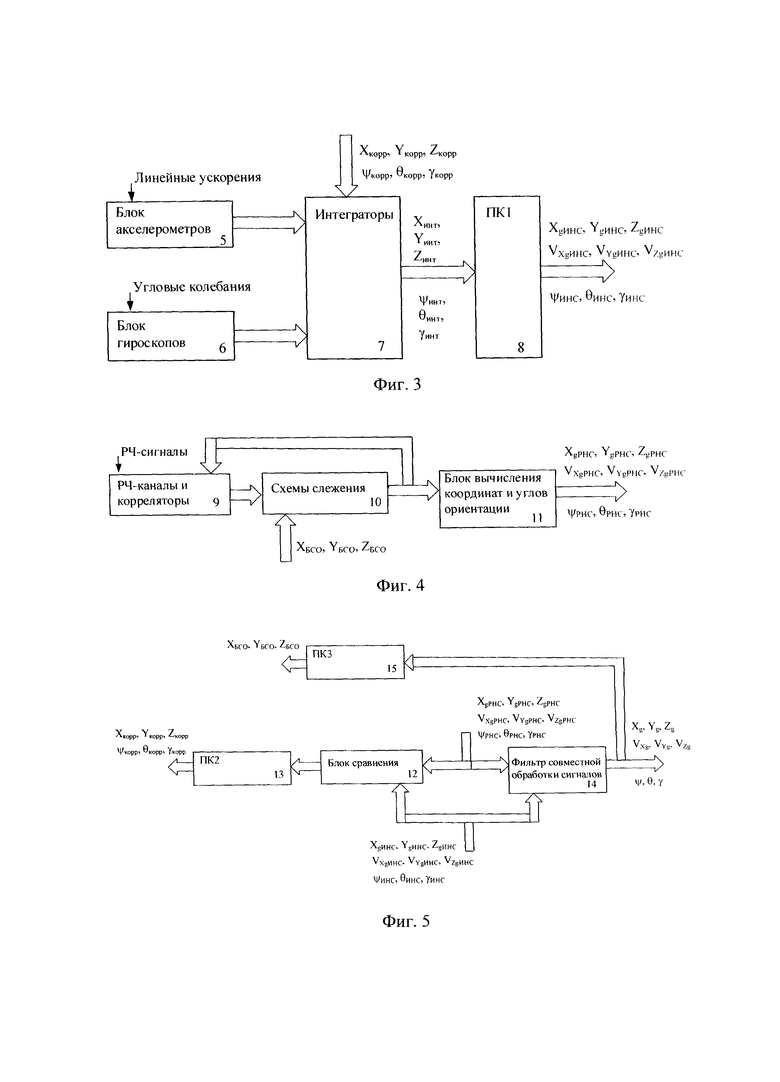
Предлагаемая группа изобретений относится к области радиоинерциальных систем навигации (РИСН). Сущность способов коррекции инерциальной части радиоинерциальной системы навигации заключается в следующем. Определяют линейные скорости и координаты по информации, полученной радионавигационной частью (РСН), а перед проведением коррекции оба варианта параметров состояния параметров навигации и ориентации пересчитывают в одну и ту же систему координат (СК), проводят совместную фильтрацию обоих вариантов полученных параметров состояния и применяют отфильтрованные значения линейных скоростей и координат для изменения начальных условий при интегрировании. Техническим результатом группы изобретений является повышение точности работы РИСН как в инерциальном, так и в интегрированном режимах. 3 н. и 1 з.п. ф-лы, 5 ил.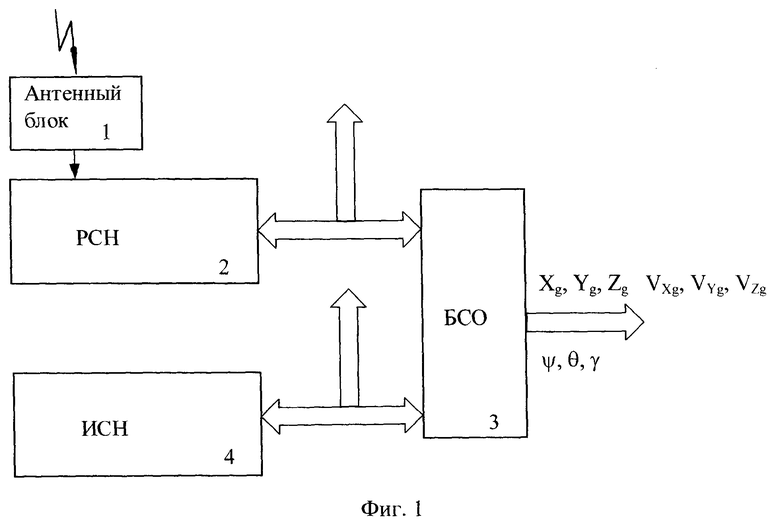
1. Способ коррекции показаний ИСН радиоинерциальной системы навигации в части линейных координат, скоростей, ускорений, заключающийся в том, что с помощью ИСН измеряют показания акселерометров в их измерительной системе координат (ИСКА), двукратно интегрируя, формируют на их основе линейные скорости и координаты, для осуществления коррекции параметров состояния, определенных на базе информации получаемой ИСН, применяют для изменения начальных условий интегрирования на очередном интервале времени, в течение которого корректирующие поправки сохраняются, соответствующие линейные координаты и скорости, полученные с использованием информации, получаемой РСН, отличающийся тем, что определяют линейные скорости и координаты по информации, полученной РСН, а перед проведением коррекции оба варианта параметров состояния пересчитывают в одну и ту же СК.
2. Способ коррекции показаний ИСН радиоинерциальной системы навигации в части линейных координат, скоростей, ускорений, заключающийся в том, что с помощью ИСН измеряют показания акселерометров в ИСКА, двукратно интегрируя, формируют на их основе линейные скорости и координаты, для осуществления коррекции параметров состояния, определенных на базе информации получаемой ИСН, применяют для изменения начальных условий интегрирования на очередном интервале времени, в течение которого корректирующие поправки сохраняются, соответствующие линейные координаты и скорости, полученные с использованием информации, получаемой РСН, отличающийся тем, что определяют линейные скорости и координаты по информации, полученной РСН, а перед проведением коррекции оба варианта параметров состояния пересчитывают в одну и ту же СК, проводят совместную фильтрацию обоих вариантов полученных параметров состояния и используют отфильтрованные значения линейных скоростей и координат для изменения начальных условий при интегрировании.
3. Способ коррекции показаний ИСН радиоинерциальной системы навигации в части линейных координат, скоростей, ускорений, заключающийся в том, что с помощью ИСН измеряют показания акселерометров в ИСКА, двукратно интегрируя, формируют на их основе линейные скорости и координаты, для осуществления коррекции параметров состояния, определенных на базе информации получаемой ИСН, добавляют соответствующие поправки к линейным ускорениям, получаемые с использованием информации от РСН при совместной фильтрации, отличающийся тем, что определяют линейные скорости и координаты по информации, полученной РСН, а перед проведением совместной фильтрации оба варианта параметров состояния пересчитывают в одну и ту же СК, предпочтительно ИСКА.
4. Способ коррекции показаний ИСН радиоинерциальной системы навигации в части линейных координат, скоростей, ускорений по п. 1, или 2, или 3, отличающийся тем, что альтернативные углы ориентации и параметры, с ними связанные, на основании которых прямо или опосредованно производится приведение данных от одной СК к другой, определяют путём системы уравнений, основанных на расчетных углах пеленгов.
| ГЛОНАСС | |||
| Принципы построения и функционирования | |||
| Справочное пособие | |||
| Изд | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Способы определения значений углов ориентации в процессе движения летательного аппарата и коррекции значений углов ориентации | 2020 |
|
RU2776856C2 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС, УСТРОЙСТВО ВЫЧИСЛЕНИЯ СКОРОСТИ И КООРДИНАТ, БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ, СПОСОБ КОРРЕКЦИИ ИНЕРЦИАЛЬНЫХ ДАТЧИКОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2373498C2 |
| US 0010845452 B2, 24.11.2020 | |||
| US 0011187813 B2, 30.11.2021. | |||

