Изобретение относиться к области космической техники и может быть использовано для ориентации орбитального околоземного космического аппарата (КА) относительно орбитальной системы координат (ОСК) с использованием магнитного поля Земли (МПЗ) без применения специальных внешних датчиков ориентации (датчика Солнца, астродатчика, прибора ориентации по Земле и других).
В качестве датчика трехосной ориентации применяются магнитометры (МГМ), установленные по связанным осям КА.
Известны способы ориентации КА [1-5, 7-15], согласно которым магнитное поле Земли используется как в качестве ориентира, так и в качестве силового поля для создания механических моментов, стабилизирующих положение КА относительно ОСК.
Различают пассивные и активные способы ориентации КА. Пассивные способы основаны на применении постоянных магнитов или электростатических зарядов распределенных по корпусу спутника [9, 13], взаимодействующих с магнитным полем Земли, и дополнительных гравитационных штанг, что позволяет приводить спутник в некоторое устойчивое положение.
В активных способах ориентации механический момент на корпус КА создают за счет применения управляемых электромагнитных катушек (ЭМК), взаимодействующих с МПЗ или управляющих двигателей маховиков (УДМ) [7]. Известен так же способ стабилизации КА по магнитному полю путем применения двигателя маховика [8], кинетический момент которого расположен вдоль оси тангажа КА (по бинормали к плоскости орбиты), благодаря чему создают гироскопические моменты, действующие непосредственно на корпус спутника (подобно гироорбитанту), и удерживают, таким образом, КА в плоскости орбиты.
Указанные способы пассивного и активного типов применяются для ориентации микро- и наноспутников, т.к. величины создаваемых магнитных моментов малы, запаса устойчивой ориентации хватает только для небольших полезных нагрузок. Кроме того, алгоритмы ориентации требуют дифференцирования разности измеренных и расчетных данных о векторе магнитной индукции Земли, что ухудшает точность и качество ориентации КА.
Известен способ ориентации ИСЗ в ОСК [8, стр. 156], включающий измерение вектора магнитной индукции  магнитного поля Земли (МПЗ), магнитометрами (МГМ), установленными по осям связанной системы координат (ССК) и вычисление соответствующего этому положению вектора магнитной индукции
магнитного поля Земли (МПЗ), магнитометрами (МГМ), установленными по осям связанной системы координат (ССК) и вычисление соответствующего этому положению вектора магнитной индукции  МПЗ в проекциях на оси ОСК по Международному аналитическому геомагнитному полю Земли.
МПЗ в проекциях на оси ОСК по Международному аналитическому геомагнитному полю Земли.
Данный способ принят в качестве наиболее близкого аналога.
К недостатку следует отнести отсутствие возможности ориентирования КА относительно ОСК, используя показания одних магнитометров, не применяя дополнительных данных от сторонних датчиков внешней информации, таких как датчики Солнца, датчики звезд и неприменимость способа для габаритных и тяжелых КА.
Технической задачей предлагаемого технического решения является создание способа управления КА, способного восстанавливать ориентацию КА относительно ОСК из произвольного неориентированного положения, используя измерения одних магнитометров - по принципу «слепой спутник» и независимо от его массы и габаритов.
Этот способ ориентации КА в магнитном поле Земли позволяет полностью освободиться от датчиков внешней информации и выполнять восстановление орбитальной ориентации КА в любой момент времени и на любом участке орбиты.
В отличие от близкого аналога, который включает измерения текущих проекций вектора магнитной индукции Вс (bxc, byc, bzc) магнитного поля
Земли (МПЗ) магнитометрами (МГМ), установленными по осям связанной системы координат (ССК), и одновременное вычисление вектора магнитной индукции Bo (bxo, byo, bzo) МПЗ в проекциях на оси орбитальной системы координат (ОСК) с использованием аналитической модели геомагнитного поля Земли (МГП), в предлагаемом способе ориентации приравнивают поворот КА относительно ОСК обратному повороту измеренного вектора относительно ОСК, при этом повернутому вектору A (Ax, Ay, Az) присваивают координаты вектора B в ССК по правилу Ах≡Вх, Ау≡Ву, Az≡Bz, по которым вычисляют кватернион q=q0+iq1+jq2+kq3 взаимной ориентации векторов  и
и  в ОСК, измеряют с помощью гироскопических датчиков угловых скоростей проекции абсолютной угловой скорости КА на оси ССК ω (ωx, ωy, ωz), принимают в те же моменты времени от навигационно-баллистического обеспечения данные о параметрах угловой скорости ОСК относительно ИСК ωo (ωхо, ωyo, ωzo), определяют угловую скорость КА относительно ОСК ωс (ωxc, ωyc, ωzc) = ω-CωoCT, где С - матрица, составленная из элементов кватерниона q, т - знак транспонирования, вычисляют скорость
в ОСК, измеряют с помощью гироскопических датчиков угловых скоростей проекции абсолютной угловой скорости КА на оси ССК ω (ωx, ωy, ωz), принимают в те же моменты времени от навигационно-баллистического обеспечения данные о параметрах угловой скорости ОСК относительно ИСК ωo (ωхо, ωyo, ωzo), определяют угловую скорость КА относительно ОСК ωс (ωxc, ωyc, ωzc) = ω-CωoCT, где С - матрица, составленная из элементов кватерниона q, т - знак транспонирования, вычисляют скорость  подают сигналы управления на активные исполнительные органы КА пропорционально
подают сигналы управления на активные исполнительные органы КА пропорционально  где n=1, 2, 3 и поворачивают КА до совмещения показаний МГМ с расчетными значениями магнитной индукции МПЗ по соответствующим осям ОСК, завершая тем самым процесс восстановления ориентации КА.
где n=1, 2, 3 и поворачивают КА до совмещения показаний МГМ с расчетными значениями магнитной индукции МПЗ по соответствующим осям ОСК, завершая тем самым процесс восстановления ориентации КА.
Ниже приведен практический пример реализации предложенного способа.
Физический смысл способа ВО КА относительно ОСК основан на свойстве обратимого отображения - изоморфизме линейного преобразования координат вектора при ортогональном повороте 3-х мерного базиса:
а=М⋅b
В соответствии с этим свойством [6] преобразование координат вектора вследствие вращения базовой системы координат равносильно повороту самого вектора в исходной системе координат (ИСК). Другими словами, мы не знаем, что преобразовано - координаты вектора в повернутой системе координат или координаты повернутого вектора в исходной системе координат относительно собственного начального положения. При этом обе матрицы преобразования одинаковы. Отличием является то, что в результате поворота вектора в исходной системе координат, его преобразованные координаты будут находиться так же в исходной (а не в повернутой) системе координат и будут в точности соответствовать его же координатам в повернутой системе координат.
Указанное свойство легло в основу разработки способа восстановления ориентации КА с помощью данных от трех ортогонально расположенных магнитометров.
Восстановление ориентации идет до совмещения расчетного и измеренного векторов магнитной индукции поля Земли.
Кватернион взаимной ориентации векторов Bo(BoxBoyBoz) и Bc(BcxBcyBcz), после их нормирования, удобно рассчитывать по формуле:

Рассчитываем угловые скорости КА относительно ОСК
ωс=ω-СωoCT,
где

С - матрица, составленная из элементов кватерниона q (матрица Родрига-Гамильтона), ω - кососимметричная матрица, составленная из показаний БИУС, ωo - кососимметричная матрица угловых скоростей ОСК относительно ИСК (из данных баллистики).
Рассчитываем угловые скорости кватернионов по формуле:




Формируем сигналы управления на исполнительные органы пропорционально  где n=1, 2, 3:
где n=1, 2, 3: 


Подаем сигналы управления на исполнительные органы (ИО), поворачиваем КА до совмещения Ao и Bo (cosϕ = 1), завершая процесс восстановления ориентации КА.
Заметим, что в качестве ИО могут быть выбраны любые ИО, например УДМ или реактивные двигатели.
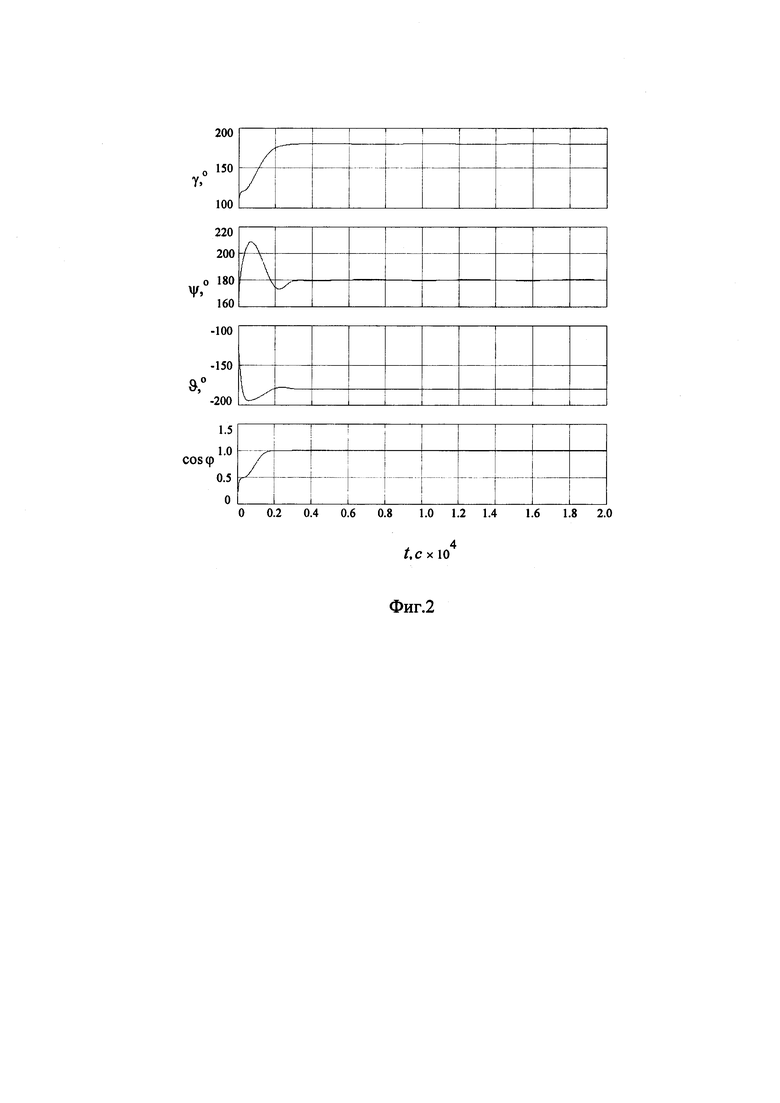
На фигурах 1 и 2 показаны графики ориентации КА в процессе восстановления ориентации КА из неориентированных положений в ОСК.
На фиг. 1 показаны небольшие начальные отклонения КА от ОСК.
На фиг. 2 показано произвольное положение КА относительно ОСК с очень большими начальными угловыми отклонениями КА от ОСК.
Из представленных графиков видно, что процессы восстановления ориентации КА из неориентированного положения проходят достаточно быстро и с хорошим качеством. Точность ориентации составила ~0,3° по углу и ~0,001°/c по угловой скорости.
МГСО позволяет выполнять программные повороты КА на произвольные углы относительно ОСК.
Для реализации способа по п. 2 вначале задают программное положение КА относительно ОСК и пересчитывают проекции вычисленного ранее вектора Bo на оси программного базиса Bn(Bxn, Byn, Bzn)=P⋅Bo (Bxo, Byo, Bzo), где P - матрица требуемой ориентации программной системы координат (ПСК) относительно ОСК, поворот КА теперь уже относительно ПСК приравнивают обратному повороту измеренного вектора В→An относительно ПСК, при этом повернутому вектору An (Axp, Аур, Azp) присваивают измеренные координаты вектора В по правилу Axp≡Вхс, Аур≡Byc, Azp≡Bzc, вычисляют кватернион взаимной ориентации λ=λ0+i'λ1+j'λ2+k'λ3 векторов  вычисляют угловую скорость КА (ССК) относительно ПСК по формуле ωcn=ω-SωoST-SPωn(SP)T, где S -матрица, составленная из элементов кватерниона λ, ωn - кососимметричная матрица программных скоростей КА, Т - знак транспонирования, после чего вычисляют скорости
вычисляют угловую скорость КА (ССК) относительно ПСК по формуле ωcn=ω-SωoST-SPωn(SP)T, где S -матрица, составленная из элементов кватерниона λ, ωn - кососимметричная матрица программных скоростей КА, Т - знак транспонирования, после чего вычисляют скорости  подают сигналы управления на активные исполнительные органы КА пропорционально
подают сигналы управления на активные исполнительные органы КА пропорционально  где m=1, 2, 3 и поворачивают КА до совмещения показаний МГМ с расчетными значениями магнитной индукции МПЗ по соответствующим осям ПСК, завершая тем самым процесс программного поворота КА относительно ОСК.
где m=1, 2, 3 и поворачивают КА до совмещения показаний МГМ с расчетными значениями магнитной индукции МПЗ по соответствующим осям ПСК, завершая тем самым процесс программного поворота КА относительно ОСК.
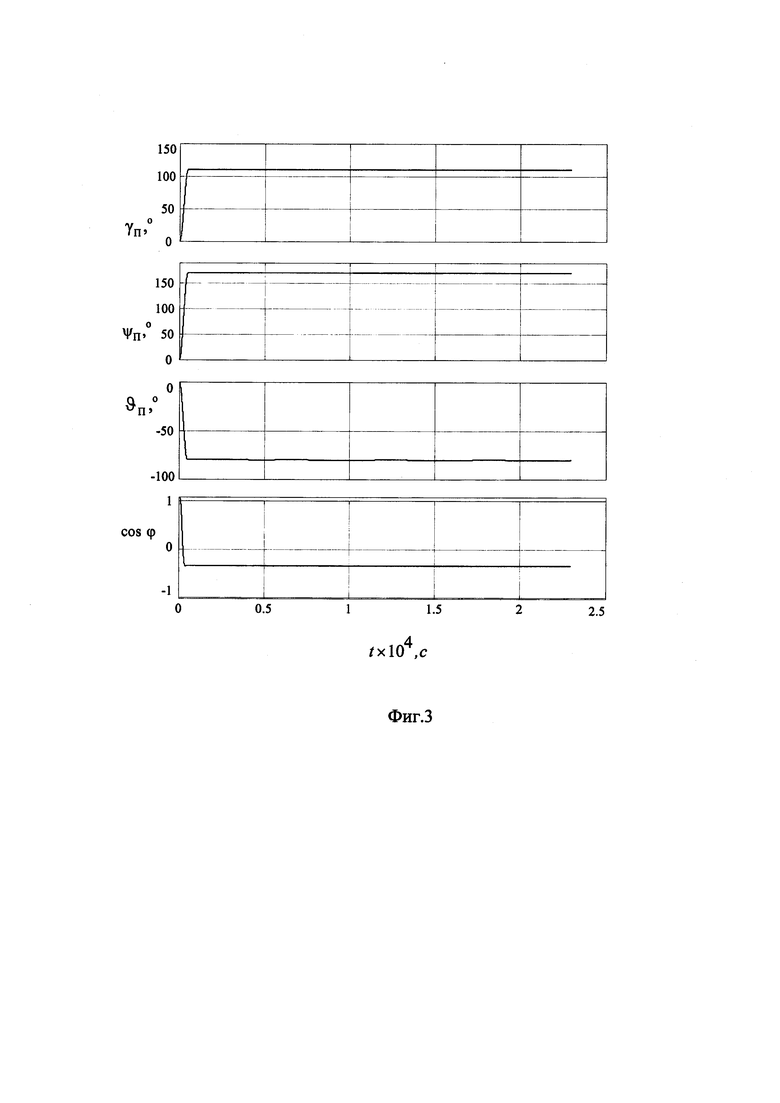
Иллюстрация программного поворота КА показана на фигурах 3 и 4. КА выполняет устойчивые и качественные программные повороты одновременно на углы ориентации относительно ОСК ψп = 180°, ϑп = -75°, γп=120°. В процессе поворота происходит совмещение векторов магнитной индукции в системах ПСК и ССК (фиг. 4).
Таким образом, предложенный способ ориентации околоземного орбитального космического аппарата позволяет выполнять две функции - восстанавливать ориентацию КА из произвольного неориентированного положения и управлять программным положением КА без ограничений на задаваемые программные углы.
Использованные источники
1. Барышев В.А., Крылов Г.Н. Контроль ориентации метеорологических спутников. Л., Гидрометеоиздат, 1968.
2. Белецкий В.В., Голубков В.В., Степанова Е.А., Хицкевич И.Г. Определение ориентации искусственных спутников по данным измерений. М., издание ИПМ АН СССР, 1967.
3. Белоконов И.В., Крамлих А.В. Методика восстановления ориентации космического аппарата при комплексировании магнитометрических и радионавигационных измерений. Вестник Самарского государственного аэрокосмического университета им. С.П. Королева, 2007.
4. Беляев М.Ю. Научные эксперименты на космических кораблях и орбитальных станциях. М., Машиностроение, 1984.
5. Воронцов А.В., Горбунов А.В., Карбасников Б.В., Козаков А.В. Приближенная модель работы магнитогироскопического орбитанта в составе системы ориентации ИСЗ типа «МЕТЕОР-М», М., Вопросы электромеханики Т. 106. 2008.
6. Голдстейн Г. Классическая механика. М., Наука, 1957.
7. Иванов Д.С., Ивлев Н.А., Карпенко С.О., Овчинников М.Ю., Ролдугин Д.С., Ткачев С.С. Результаты летных испытаний системы ориентации микроспутника Чибис-М, Космические исследования. 2014, том 52, №3, с. 218-228.
8. Казаков А.В. Магнитогироскопическя система - достойный соперник гравитационной системы ориентации на малых спутниках. [Электронный ресурс]/. Электронная версия печат. публ.// jumal.vniiem.ru/
9. Коваленко А.П. Магнитные системы управления космическими летательными аппаратами. М., Машиностроение, 1975.
10. Овчинников М.Ю., Пеньков В.И., Ролдугин Д.С.Магнитные системы малых спутников. М., издание ИПМ РАН, 2016, 366 с.
11. Способ определения трехосной ориентации орбитального космического аппарата. Патент RU 2691536 от 02.13.2018.
12. Способ определения трехосной ориентации орбитального космического аппарата. Патент RU 2408508.
13. Способ управления ориентацией искусственного спутника Земли. Патент RU 2159201.
14. Способ полупассивной трехосной стабилизации динамически симметричного искусственного спутника Земли. Патент RU 2332334.
15. Wiegand Matthias. Autonomous satellite navigation via Kalman filtering of magnetometer data. Acta astronautika. V. 38. №4-8. 1996.
16. International Geomagnetic Reference Field (IGRF) - международное геомагнитное аналитической поле, 2020.
17. Поле геомагнитное. Модель поля внутри земных источников. ГОСТ25645.126-85. Издание официальное. Государственный стандарт СССР по управлению качеством продукции и стандартам. Москва, 1987.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2691536C1 |
| Способ астроориентации орбитального космического аппарата (варианты) | 2022 |
|
RU2793977C1 |
| Система астроориентации орбитального космического аппарата с обратными связями | 2023 |
|
RU2812876C1 |
| Способ восстановления орбитальной ориентации космического аппарата по показаниям датчика звезд | 2022 |
|
RU2790354C1 |
| СПОСОБ ПОДДЕРЖАНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА С СИЛОВЫМИ ГИРОСКОПАМИ И ЦЕЛЕВОЙ НАГРУЗКОЙ | 2006 |
|
RU2356802C2 |
| Способ восстановления ориентации орбитального космического аппарата | 2015 |
|
RU2610766C1 |
| Способ трехосной стабилизации экранированного космического аппарата с центрально-симметричным распределением заряда электростатической защиты и устройство для его реализации | 2024 |
|
RU2841573C1 |
| Способ ориентации орбитального космического аппарата с программно-управляемыми батареями солнечными | 2015 |
|
RU2613097C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНЕРЦИОННЫХ ХАРАКТЕРИСТИК КОСМИЧЕСКОГО АППАРАТА В ПРОЦЕССЕ УПРАВЛЕНИЯ С ПОМОЩЬЮ СИЛОВЫХ ГИРОСКОПОВ И РЕАКТИВНЫХ ДВИГАТЕЛЕЙ | 2001 |
|
RU2208559C1 |
| СПОСОБ ОРИЕНТАЦИИ И СИСТЕМА ОРИЕНТАЦИИ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1999 |
|
RU2150412C1 |


Изобретение относится к системам ориентации космических аппаратов (КА) в магнитном поле Земли (МПЗ). Согласно изобретению в качестве датчиков положения КА применяют только магнитометры, измеряющие вектор магнитной индукции (В) МПЗ в связанной системе координат (ССК) КА. По аналитической модели МПЗ вычисляют вектор магнитной индукции (В0) МПЗ в проекциях на оси орбитальной системы координат (ОСК). Приравнивают поворот КА относительно ОСК обратному повороту вектора: В→А относительно ОСК, при этом повернутому вектору A присваивают координаты вектора B в ССК, по которым вычисляют кватернион взаимной ориентации векторов А и В0 в ОСК. По измеренным проекциям абсолютной угловой скорости КА на оси ССК вычисляют соответствующий кватернион угловой скорости. Способ позволяет восстанавливать ориентацию КА в ОСК из произвольного положения, а также – производить без ограничений программную ориентацию КА в ОСК. Технический результат состоит в применимости способа практически к любым типам КА, наиболее же эффективно - к КА небольших размеров. 4 ил.
Способ ориентации околоземного орбитального космического аппарата (КА), включающий измерения текущих проекций вектора магнитной индукции B (Bx, By, Bz) магнитного поля Земли (МПЗ) магнитометрами (МГМ), установленными по осям связанной системы координат (ССК), и одновременное вычисление вектора магнитной индукции Во (Вxo, Вyo, Вzo) МПЗ в проекциях на оси орбитальной системы координат (ОСК) с использованием аналитической модели геомагнитного поля Земли (МГП), поворот КА, отличающийся тем, что приравнивают поворот КА относительно ОСК обратному повороту измеренного вектора В → А относительно ОСК, при этом повернутому вектору A (Ax, Ay, Az) присваивают координаты вектора В в ССК по правилу Ах=Вх, Ау=Ву, Az=Bz, по которым вычисляют кватернион q=q0+iq1+iq2+kq3 взаимной ориентации векторов  и
и  в ОСК, измеряют с помощью гироскопических датчиков угловых скоростей проекции абсолютной угловой скорости КА на оси ССК ω (ωx, ωy, ωz), принимают в те же моменты времени от навигационно-баллистического обеспечения данные о параметрах угловой скорости ОСК относительно исходной системы координат (ИСК) ωo (ωхо, ωyo, ωzo), определяют угловую скорость КА относительно ОСК ωс (ωxc, ωyc, ωzc)=ω-CωoCT, где С - матрица, составленная из элементов кватерниона q, T - знак транспонирования, вычисляют скорость
в ОСК, измеряют с помощью гироскопических датчиков угловых скоростей проекции абсолютной угловой скорости КА на оси ССК ω (ωx, ωy, ωz), принимают в те же моменты времени от навигационно-баллистического обеспечения данные о параметрах угловой скорости ОСК относительно исходной системы координат (ИСК) ωo (ωхо, ωyo, ωzo), определяют угловую скорость КА относительно ОСК ωс (ωxc, ωyc, ωzc)=ω-CωoCT, где С - матрица, составленная из элементов кватерниона q, T - знак транспонирования, вычисляют скорость  подают сигналы управления на активные исполнительные органы КА пропорционально
подают сигналы управления на активные исполнительные органы КА пропорционально  где n=1, 2, 3, и поворачивают КА до совмещения показаний МГМ с расчетными значениями магнитной индукции МПЗ по соответствующим осям ОСК, завершая тем самым процесс восстановления ориентации КА, или задают программное положение КА относительно ОСК и пересчитывают проекции вычисленного ранее вектора Вo на оси программного базиса Bn (Bxn, Byn, Bzn)=Р⋅Вo (Bxo, Byo, Bzo), где Р - матрица требуемой ориентации программной системы координат (ПСК) относительно ОСК, поворот КА теперь уже относительно ПСК приравнивают обратному повороту измеренного вектора В → Аn относительно ПСК, при этом повернутому вектору Аn (Axp, Ayp, Azp) присваивают измеренные координаты вектора В по правилу Аxp≡Вхс, Аур=Вyc, Azp=Вzc, вычисляют кватернион взаимной ориентации λ=λ0+i'λ1+j'λ2+k'λ3 векторов
где n=1, 2, 3, и поворачивают КА до совмещения показаний МГМ с расчетными значениями магнитной индукции МПЗ по соответствующим осям ОСК, завершая тем самым процесс восстановления ориентации КА, или задают программное положение КА относительно ОСК и пересчитывают проекции вычисленного ранее вектора Вo на оси программного базиса Bn (Bxn, Byn, Bzn)=Р⋅Вo (Bxo, Byo, Bzo), где Р - матрица требуемой ориентации программной системы координат (ПСК) относительно ОСК, поворот КА теперь уже относительно ПСК приравнивают обратному повороту измеренного вектора В → Аn относительно ПСК, при этом повернутому вектору Аn (Axp, Ayp, Azp) присваивают измеренные координаты вектора В по правилу Аxp≡Вхс, Аур=Вyc, Azp=Вzc, вычисляют кватернион взаимной ориентации λ=λ0+i'λ1+j'λ2+k'λ3 векторов  и
и  вычисляют угловую скорость КА (ССК) относительно ПСК по формуле ωcn=ω-SωoST-SPωn(SP)T, где S - матрица, составленная из элементов кватерниона λ, ωn - кососимметричная матрица программных скоростей КА, Т - знак транспонирования, после чего вычисляют скорости
вычисляют угловую скорость КА (ССК) относительно ПСК по формуле ωcn=ω-SωoST-SPωn(SP)T, где S - матрица, составленная из элементов кватерниона λ, ωn - кососимметричная матрица программных скоростей КА, Т - знак транспонирования, после чего вычисляют скорости  подают сигналы управления на активные исполнительные органы КА пропорционально
подают сигналы управления на активные исполнительные органы КА пропорционально  где m=1, 2, 3, и поворачивают КА до совмещения показаний МГМ с расчетными значениями магнитной индукции МПЗ по соответствующим осям ПСК, завершая тем самым процесс программного поворота КА относительно ОСК.
где m=1, 2, 3, и поворачивают КА до совмещения показаний МГМ с расчетными значениями магнитной индукции МПЗ по соответствующим осям ПСК, завершая тем самым процесс программного поворота КА относительно ОСК.
| Канд | |||
| техн | |||
| наук А.В | |||
| Козаков | |||
| Магнитогироскопическая система - достойный соперник гравитационной системы ориентации на малых спутниках | |||
| Ж | |||
| "Вопросы электромеханики | |||
| Труды ВНИИЭМ" | |||
| Облицовка комнатных печей | 1918 |
|
SU100A1 |
| Способ гальванического снятия позолоты с серебряных изделий без заметного изменения их формы | 1923 |
|
SU12A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ТРЕХОСНОЙ ОРИЕНТАЦИИ КОСМИЧЕСКОГО АППАРАТА | 2018 |
|
RU2691536C1 |
| СПОСОБ ОРИЕНТАЦИИ И СИСТЕМА ОРИЕНТАЦИИ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1999 |
|
RU2150412C1 |

