где V - скорость контурного движения ГС; I - пропускаемый по ней электрич. ток: (о орбитальная угловая скорость ЦМ космич. конструкции; Вх. Ву, Вг - компоненты вектора индукции магнитного поля соответственно вдоль скорости, местной вертикали и бинормали орбиты ЦМ конструкции; в - заданный угол между нормалью плоскости максимальной проекции контура и плоскостью местного горизонта; t - заданный угол между проекцией данной нормали на плоскость местного горизонта и орбитальной скоростью ЦМ конструкции; г- средний
радиус максимальной проекции контура: ц - погонная масса ГС. Стабилизируют контур, определяя текущее отклонение плоскости его максимальной проекции от заданной ориентации, и изменяя в соответствии с этим скорость контурного движения и электрический ток в окрестности их равновесных знамений. Причем направление скорости (V) и тока (I) выбирают взаимопротивоположными при разных знаках этих величин и одинаковыми в противном случае.7 ил.






Использование: управление и стабилизация элементов космич. объектов при создании на орбите вокруг небесного тела крупногабаритных конструкций на базе ди- намич. ГС. Сущность изобретения: на орбите вокруг небесного тела, обладающего магнитным полем, осуществляют развертывание ГС в форме околокругового замкнутого контура путем сообщения ГС контурного движения и пропускания электрич. тока вдоль связи. При формировании контура оп- ре дел я ют орбитальную угловую скорость центра масс (ЦМ) космич. конструкции и компоненты вектора индукции магнитного поли, в соответствии с которыми скорость контурного движения и электрич. ток находят из условий равновесия V- 0,5 т г Cos 0{382 Cos (4BX + + Bycta 0Cos#)sln j} I « гД 1 Cos 0cos V . (.A 8X .4- By ctg 0Cos ) . 00 Ю 00 Ю Ю
Изобретение относится к средствам управления и стабилизации конструктивных элементов космических объектов и может быть использовано при создании на орбите вокруг небесного тела крупногабаритных конструкций на базе динамической гибкой связи (ГС).
Цель изобретения - расширение множества создаваемых КК за счет ослабления ограничений на. пространственную ориентацию ПМП контура ГС.
Указанная цель достигается тем, что наряду с общими операциями способа-прототипа (3) при формировании контура определят угловую скорость ( й) движения ц м. КК по орбите вокруг небесного тела и компоненты вектора индукции магнитного поля, в соответствии с которыми скорость (V) сообщаемого ГС контурного движения и пропускаемый по ней ток (I) находят из условий равновесия
.5 т г A 1cos0 3ezcosy + + (4 Вх+ By ctg 0cos p) sfn VI:0)
I-3 ро r (ДгВх -4- By ctg 0cos p) ,
где Вх, By, B2 - компоненты вектора индукции магнитного поля соответственно вдоль скорости, местной вертикали и бинормали орбиты ц. м. КК вокруг небесного тела;
О - заданный угол между нормалью ПМП контура и плоскостью местного горизонта;
ty - заданный угол между проекцией нормали на плоскость местного горизонта и орбитальной скоростью ц. м. КК;
г - средний радиус максимальной проекции контура;
fi - погонная масса ГС, стабилизируют контур, определяя текущее отклонение ПМП от заданной ориентации и изменяя в соответствии с этим скорость контурного движения и электрический ток в окрестности указанных выше равновесных значений, причем направления
скорости (V) и тока (I) выбирают взаимопротивоположными при разных знаках этих величин и одинаковыми в противном случае.
На фиг. 1 представлены геометрические параметры, характеризующие положение
контура ГС в орбитальной системе координат; на фиг. 2 показаны силы, действующие на элементы ГС при движении по орбите вокруг небесного тела; на фиг. 3 - функциональная схема технологических средств для
реализации предлагаемого способа; на фиг 4 - пример КК, построенный на базе динамической ГС; на фиг. б - пример конструктивной схемы устройства для сообщения ГС контурного движения и пропускания по ней
электрического тока; на фиг. 6 - одна из возможных схем устройства для индикации формы и пространственного положения контура ГС; на фиг. 7 - проиллюстрирован возможный метод определения пространственного положения МПМ контура.
Ориентация контура 1 в орбитальной
системе координат (ось Y направлена по
местной вертикали из ц. м, КК; ось X - по
скорости орбитального движения ц. м. КК:
ось Z - по бинормали) задается углами в и if) (фиг. 1), характеризующими пространственное положение вектора нормали п ПМП контура. ПМП совпадает с плоскостью контура, когда последний образован ГС в виде
плоской кривой (с нулепым кручением); если
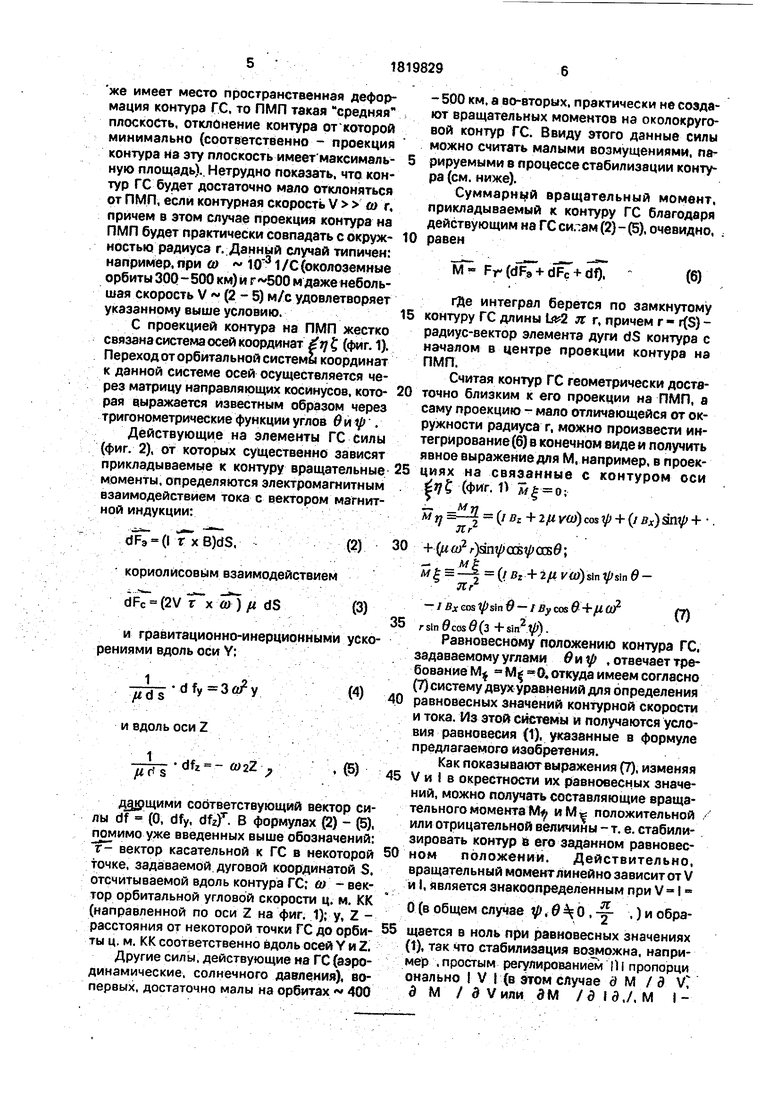
же имеет место пространственная деформация контура ГС. то ПМП такая средняя плоскость, отклонение контура от которой минимально (соответственно - проекция контура на эту плоскость имеет максималь- ную площадь).. Нетрудно показать, что контур ГС будет достаточно мало отклоняться от ПМП. если контурная скорость V to г, причем в этом случае проекция контура на ПМП будет практически совпадать с окруж- ностью радиуса г. Данный случай типичен: на пример, при со (околоземные орбиты 300 - 500 км) и г 500 м даже небол ь- шая скорость V (2 - 5) м/с удовлетворяет указанному выше условию.
С проекцией контура на ПМП жестко связана система осей координат Јrj Ј (фиг. 1). Переход от орбитальной системы координат к данной системе осей осуществляется через матрицу направляющих косинусов, кото- рая выражается известным образом через тригонометрические функции углов вичр .
Действующие на элементы ГС силы (фиг. 2), от которых существенно зависят прикладываемые к контуру вращательные моменты, определяются электромагнитным взаимодействием тока с вектором магнитной индукции:
dF3 (l т xB)dS.
кориолисовым взаимодействием отТ (2V uT) ft dS(3)
и гравитационно-инерционными ускорениями вдоль оси Y:
... и вдоль оси Z
dfz - Q)22
дающими соответствующий вектор силы df (0, dfy, dfz)T- В формулах jf2) - (5), помимо уже введенных выше обозначении: г вектор касательной к ГС в некоторой точке, задаваемой дуговой координатой S. отсчитываемой вдоль контура ГС: (о - вектор орбитальной угловой скорости ц. м. КК (направленной по оси Z на фиг. 1); у, Z - расстояния от некоторой точки ГС до орби- ты ц. м. КК соответственно вдоль осей Y и Z.
Другие силы, действующие на ГС {аэродинамические, солнечного давления), во- первых, достаточно малы на орбитах 400
- 500 км, а во-вторых, практически не создают вращательных моментов на околокруговой контур ГС. Ввиду этого данные силы можно считать малыми возмущениями, парируемыми в процессе стабилизации контура (см. ниже).
Суммарный вращательный момент, прикладываемый к контуру ГС благодаря действующим на ГС си.ам (2) - (5), очевидно, равен
М- FT-(dF8 + dFc + df),
(6)
5 10 15
20
Считая контур ГС геометрически достаточно близким к его проекции на ПМП, а саму проекцию - мало отличающейся от окружности радиуса г, можно произвести интегрирование (6) в конечном виде и получить явное выражение для М, например, в проекциях на связанные с контуром оси
ЈГ}Ј(фИГ. t Mg-O;
(}B.+2flVCO)coslp + (lBx)snij} + . ..2
30 +()sin cxs ccs5;
М Ј -| (/ Вг + 2ft V(O)sin в -
35
CO
40
45
50 55
Яг
- 1Вхса 11)п$ - 1Вуса&в+Ца г sin в cos в (3 +sin2V)Равновесному положению контура ГС. задаваемому углами Owip , отвечает требование М Mj| Q, откуда имеем согласно (7) систему двух уравнений для определения равновесных значений контурной скорости и тока. Из этой системы и получаются условия равновесия (1), указанные в формуле предлагаемого изобретения.
Как показывают выражения (7), изменяя V и I в окрестности их равновесных значений, можно получать составляющие вращательного моментам иМ« положительной или отрицательной величины -т. е. стабилизировать контур в его заданном равновесном положении. Действительно, вращательный момент линейно зависит от V и I, является знакоопределенным при V I °°
О (в общем случае ip, 0%Q , -5- ,) и обращается в ноль при равновесных значениях (1), так что стабилизация возможна, например .простым регулированием 111 пропорци онально I V I (в этом случае д М / д С дМ /ЭУили ам /5I5./.M Iтличны от нуля в равновесном состоянии истемы).
Особые случаи ориентации контура и оотношения компонент вектора магнитной ндукции также не вызывают принципйапь- 5 ых затруднений. Например, при в V ) и By 0 малые изменения моментов (7) в крестности равновесия таковы
дМ(2 /гш) 5 V + (IBX + ) 2г)д ty ; 10 д Ме-(3 ,uft)2r-mx)5 в ,d il.«l)}
- . /
(8) 15
(равновесный ток I - 2 fict) V/Bz не варьируется).
При отрицательном коэффициенте во втором равенстве (8) обеспечена стабилизация по оси Ј . Стабилизация по оси г) не- 20 зависимо достигается за счет выбора необходимой вариации скорости 5 V. В частности, если Т ( 1/ЗВ2 - для орбит высотой 300 - 500км), то для типичных параметров контура ГС: (л 10Г3кг/м;г 500м- требу- 25 емые значения тока и скорости достаточно выбрать такими: 0,15 А; V 2,3 м/с, причем I 5 V d-ty I max. Такой режим стабилизации, очевидно, не представляет какой- либо сложности,зо
Похожая картина будет в случае
О -у- ( $ - любой) и Вх. 0 и т. д. Вообще
же, углы в и ориентации ПМП контура следует задавать с условием обеспечения 35 эффективной стабилизации последнего вдоль всей орбиты - в соответствий с изменением вектора магнитной индукции на (Этой орбите (т. е. в зависимости от формы и наклонения орбиты к магнитному экватору 40 небесного тела).
Предлагаемый способ может быть реализован с помощью устройства (фиг; 3), содержащего механизм 2 для запуска и управления движением ГС, приспособле- 45 ние 3 для пропускания тока вдоль ГС, блок 4 регулирования силы тока и скорости контурного движения ГС, программно-стабили зирующий блок (процессор) 5, бортовую навигационную систему (или радиокомп- 50 лекс связи с наземными средствами определения орбиты КК) б, блок 7 вычисления угловой скорости а) , систему 8 для определения проекций вектора индукции: Вх, By, Bz на орбитальные оси координат (трехос- §5 ный магнитометр). С этой системой могут быть объединены средства для построения на борту КК орбитальных осей (автономные например с датчиком ЙК-вертикали и ионным датчиком орбитальной скорости ц. м. КК. либо на базе внешнетраекторных измерений).
Кроме того, в состав описываемого устройства предусмотрены средства контроля формы и положения ПМП контура ГС, которые могут быть выполнены в виде (широкоугольных) телекамер 9, связанных с анализатором 10 изображений. Телекамеры могут быть установлены непосредственно на корпусе (платформе) механизма 2. Этот корпус (платформа) связан с некоторым базовым элементом КК посредством шарнирного узла 11, снабженного приводом ориентации корпуса в орбитальных осях (не показан), управляемым по сигналам блока 5.
Пример одной из многих возможных КК, построенных на базе динамических ГС, дан на фиг. 4: контур 12 расположен вдоль орбиты 13 ц. м. КК, в плоскости местного горизонта, а контур 14- перпендикулярно орбите 13 (вектору скорости ц. м. КК). Указанные контуры ГС выполняют здесь функции конструктивных связей между некоторыми модулями 15 и 16, расположенными вдоль орбиты 13, а также между модулями 17 и 18, образующими гравитационно-стабилизированную связку с модулем 15. Для дополнительной стабилизации КК с модулем 16 могут быть соединены привязные платформы 19 и 20, выпущенные вдоль местной вертикали. Связки 15 - 17 -18 и 16 - 19 -.20 выполнены, преимущественно по схеме космического лифта (с регулированием расстояний между связанными телами).
Кроме функций конструктивных элементов, динамические контуры ГС 12 и 14 могут использоваться как антенны с соответствующими диаграммами направленности, причем контур 12 может согласно предлагаемому способу разворачиваться вокруг оси 15-16 (сканирование в нормальной плоскости), а контур 14 -. вокруг оси 17 - 18 (сканирование по курсу).
Очевидно, что описанная КК может быть упрощена : комбинации элементов 14-15 - 17 - 18 и 16 - 12 (например, без 19 и 20) реализуемы в виде самостоятельных КК и т. д. Важно, однако, заметить, что ни одна из подобных конструкций не осуществима на базе обычных контуров, т. е. либо при наличии лишь скорости (V) контурного движения ГС, либо только тока (I) вдоль контура, так как в обоих случаях показанные на фиг, 4 положения ПМП контуров не являются равновесными.
В возможном варианте конструктивного выполнения механизм 2 для запуска и управления движением ГС (фиг. 5) содержит
размещенный в корпусе 21 (на платформе) привод 22 с ведущим 23 и направляющими 24 и 25 шкивами, которые охвачены бесконечной лентой 26, соприкасающиеся с опор- ным роликом 27. Последний может быть 5 кинематически синхронизирован с лентой 26 (шкивом 23), чтобы избежать взаимного проскальзывания ГС 1, ленты 26 и ролика
Шкивы 24 и 25 установлены на рычагах
Механизм 2 снабжен группами направ- . ляющих роликов 29 и 30, в которых пропущена ГС. Каждая группа может быть связана с соответствующим рычагом 28 посредством контактного узла 31 (подпружи- 25 ненного штока), снабженного датчиком нагрузки на роликовую группу со стороны ГС (например, концевыми выключателями, пьезоэлементом и т. д. условно не обозначены). Датчики связаны по логической схеме 30 И через какую-либо известную цепь регулирования - с приводом отклонения рычагов 28, что обеспечивает автоматическое отслеживание лентой 26 требуемой дуги охвата ролика 27 (кривизны контура ГС 1, з.а- 35 висящей от скорости контурного движения и пропускаемого по ГС тока).
. Приспособление 3 для пропускания тока может быть объединено с группами роликов 29 и 30 путем выполнения этих роликов 40 (или части из них) электропроводными и соединения роликов (через их электропроводные опоры) проводниками 32 с элементами 33 для подвода питающего напряжения к ГС от бортового источника через блок регули- 45 рования 4. Данные элементы реализуемы, наприме ), в виде .электроразъемов, соединенных олоком 4 и бортовым источником питания кабелями 34 (фиг. 6).
Что касается самой ГС, то она может 50 быть выполнена в виде синтетической нити или ленты (из материалов: кевлар, СВМ, Spectra - 1000,2000 и др.) с электропрово- дящим покрытием (10- 100 мкм).например, алюминия, меди, золота, серебра и др. (с 55 хромовой подложкой). С целью ограничения встречных токов по короткому участку ГС (проходящему через ролик 27 - между группами роликов 29 и 30) может быть предусмотрено специальное исполнение покрьпчи ;
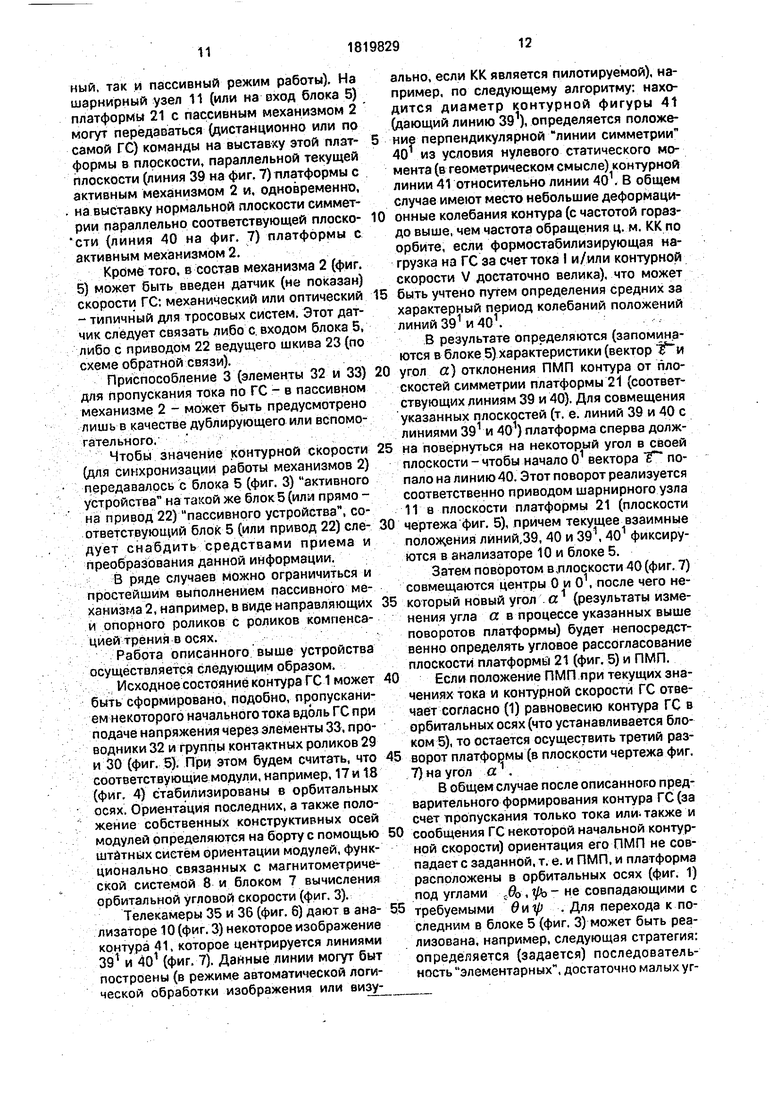
ГС: между электропроводными участками ГС помещают короткие полупроводниковые вставки (в виде тонкопленочных элементов покрытия) с шагом, несколько меньшим минимального расстояния вдоль дуги ГС от одной роликовой группы (29) до другой (30). Ориентация (р - п) переходов во вставках должна быть согласована со штатным направлением тока вдоль основной (внешней) части дуги контура ГС - тогда встречный ток будет либо исключен вовсе, либо снижен до малых величин, благодаря вентильному эффекту хотя-бы одной полупроводниковой вставки, которая гарантированно будет присутствовать на коротком участке дуги ГС в любой момент времени. Если потребуется изменить направление тока (при перестроении КК или изменении ее орбиты), то ПМП контура, т. е. платформу 21 (фиг. 5) следует перевернуть на 180° (с помощью шарнирного узла 11). -На корпусе (платформе) 21 могут быть установлены телекамеры 35 и 36 (фиг. 6). связанные электрически и информационно с бортовыми средствами (анализатором 10 изображения, фиг. 3) через кабель 34 и разъем 37 на корпусе 38 одного из модулей КК (16,17 и т. д., фиг. 4). Поля обзора телекамер могут быть координированы линиями 39 и 40 (фиг. 7), соответствующими идеальному пространственному положению ПМП контура ГС в орбитальной системе координат, так что линия 39 отвечает ПМП, лежащей в плоскости платформы 21, а линия 40 - нормальной плоскости симметрии проекции контура ГС на ПМП. Указанное координирование может строиться в анализаторе изображения 10 (фиг, 3) по информации о текущем угловом положении платформы 21. В этом случае шарнирный узел 11 следует снабдить датчиками углового положения платформы (не показаны) и связать их информационно с соответствующими входами анализатора 10.
Для визуализации ГС могут быть применены различные известные средства: подсветка ГС, покрытие ее (полностью или дискретно) светящимся составом; могут быть использованы и специальные камеры ИК-диапазона (на освещенной стороне орбиты видимости ГС возможна за счет отражения ею солнечного света) и т. д.
Наконец, если контур ГС взаимодействует более чем с одним модулем КК (как на фиг. 4), то механизмы, аналогичные показанному на фиг. 5, могут быть установлены на всех таких модулях, причем в каждой паре один из механизмов целесообразно сделать активным, а другой - пассивным (либр же оба механизма 2 имеют как активый, так и пассивный режим работы). На арнирный узел 11 (или на вход блока 5) латформы 21 с пассивным механизмом 2 огут передаваться (дистанционно или по амой ГС) команды на выставку этой платормы в плоскости, параллельной текущей лоскости (линия 39 на фиг. 7) платформы с ктивным механизмом 2 и, одновременно, а выставку нормальной плоскости симметии параллельно соответствующей плоско- ти (линия 40 на фиг. 7) платформы с активным механизмом 2.
Кроме того, в состав механизма 2 (фиг. 5) может быть введен датчик (не показан) скорости ГС: механический или оптический - типичный для тросовых систем, Этот датчик следует связать либо с. входом блока 5, либо с приводом 22 ведущего шкива 23 (по схеме обратной связи).
Приспособление 3 (элементы 32 и 33) для пропускания тока по ГС - в пассивном механизме 2 - может быть предусмотрено лишь в качестве дублирующего или вспомогательного. -:Чтобы значение контурной скорости (для синхронизации работы механизмов 2) передавалось с блока 5 (фиг. 3) активного устройства на такой же блок 5 (или прямо - на привод 22) пассивного устройства, соответствующий блок 5 (или привод 22) следует снабдить средствами приема и преобразования данной информации.
В ряде случаев можно ограничиться и простейшим выполнением пассивного механизма 2, например, в виде направляющих и опорного роликов с роликов компенсацией трения в осях.
Работа описанного выше устройства осуществляется следующим образом.
Исходное состояние контура ГС 1 может быть сформировано, подобно, пропусканием некоторого начального тока вдоль ГС при подаче напряжения через элементы 33, проводники 32 и труппы контактных роликов 29 и 30 (фиг. 5). При этом будем считать, что соответствующие модули, например, 17 и 18 (фиг. 4) стабилизированы в орбитальных осях. Ориентация последних, а также положение собственных конструктивных осей модулей определяются на борту с помощью штатных систем ориентации модулей, функционально связанных с магнитометрической системой 8 и блоком 7 вычисления орбитальной угловой скорости (фиг. 3).
Телекамеры 35 и 36 (фиг. 6) дают в анализаторе 10 (фиг. 3) некоторое изображение контура 41, которое центрируется линиями 391 и 401 (фиг. 7). Данные линии могут быт построены (в режиме автоматической логической обработки изображения или визуально, если КК является пилотируемой), например, по следующему алгоритму: находится диаметр контурной фигуры 41 (дающий линию 391), определяется положение перпендикулярной линии симметрии 40 из условия нулевого статического момента (в геометрическом смысле) контурной линии 41 относительно линии 401. В общем случае имеют место небольшие деформационные колебания контура (с частотой гораздо выше, чем частота обращения ц. м. КК по орбите, если формостабилизирующая нагрузка на ГС за счет тока I и/или контурной скорости V достаточно велика), что может
быть учтено путем определения средних за характерный период колебаний положений линий 391 и401.
В результате определяются (запоминаются в блоке 5) характеристики (вектор
угол #) отклонения ПМП контура от плоскостей симметрии платформы 21 (соответствующих линиям 39 и 40). Для совмещения указанных плоскостей (т, е. линий 39 и 40 с линиями 391 и 401) платформа сперва должна повернуться на некоторый угол в своей плоскости -чтобы начало О1 вектора 1Г попало на линию 40. Этот поворот реализуется соответственно приводом шарнирного узла 11 в плоскости платформы 21 (плоскости
чертежа фиг. 5), причем текущее взаимные положения лйний,39,40 и 39 ,401 фиксируются в анализаторе 10 и блоке 5.
Затем поворотом вллоскости 40 (фиг. 7) совмещаются центры 0 и О1, после чего некоторый новый угол .а1 (результаты изменения угла а в процессе указанных выше поворотов платформы) будет непосредственно определять угловое рассогласование плоскости платформы 21 (фиг. 5) и ПМП.
Если положение ПМП при текущих значениях тока и контурной скорости ГС отвечает согласно (1) равновесию контура ГС в орбитальных осях (что устанавливается блоком 5), то остается осуществить третий разворот платформы (в плоскости чертежа фиг. 7) на угол а1.
В общем случае после описанного предварительного формирования контура ГС (за счет пропускания только тока или; также и
сообщения ГС некоторой начальной контурной скорости) ориентация его ПМП не совпадает с заданной, т. е. и ПМП, и платформа расположены в орбитальных осях (фиг. 1) под углами Д,, tya- не совпадающими с
требуемыми 0и .Для перехода к последним в блоке 5 (фиг. 3) может быть реализована, например, следующая стратегия: определяется (задается) последовательность элементарных, достаточно малых угловых переориентации ( Д0 Aip ), г 1,2.... ,п.
где i
ЛЯ fl-#,-,: М- #- i-i: VHsVft
(9)
(заметим, что в случае контуров на фиг. 4 осуществляются развороты ПМП лишь по одному из углов: по углу iff для контура 14 и по углу в для контура 12). Далее по информации с блоков 7 и 8 (фиг. 3) о векторе индукции В. угловой скорости (О , положению орбитальных осей X, Y, Z и связанных с ПМП осей l-ijЈ (фиг. 1)-блок 5 вычисляет значение тока I и контурной скорости V , соответствующие конечным значениям углов 0р и V t в каждой г-и переориентации платформы, и формирует через блок 4 соответствующие команды на токоподводя- щие элементы 33 приспособления 3 и привод 22 механизма 2 (фиг. 3 и 5).
В результате контур ГС развернется на требуемые углы бЈи ify, отвечающие току I и скорости V согласно (1), что контролируется тем же блоком 5 через анализатор изображения 10 и, возможно, по другим каналам обратной связи; линии 391 и 40i изображения ГС вновь отклоняется от линий 39 и 40 (фиг. 7) - совмещение тех и других осуществляется так же, как это описано выше. Т. о. контур ГС, в месте с ним и платформа 21, могут быть последовательно переведены в требуемую ориентацию, зада- ваемую углами 0 и iff. .
При стабилизации ПМП равновесного контура ГС определяются в анализаторе изображения 10 угловые отклонения ПМП д д в : например, по вектору Т, углу а (фиг. 7) и известному среднему радиусу г ПМП, после чего с помощью блоков 4 и 5 вырабатываются стабилизирующие воздействия в виде вариаций контурной скорости 6 V и/ил и тока д (согласно зависимости типа (8)). В процессе стабилизации плоскости платформы 21 (фиг. 5) менять нецелесообразно; ата платформа должна лишь
совершать определенные развороты в своей плоскости для попадания точки 0 на линию.40. (фиг, 7), так это было описано выше.
Разумеется, плоскость платформы, вообще говоря, может отклоняться от ПМП контура и вследствие угловых колебаний некоторого модуля КК, механически связанного с платформой. Однако благодаря наличию на борту КК упомянутых ранее систем определения ориентации модулей в
0 5 0
5 5
0
0
0
5
орбитальных осях и платформ - от носитель- но модулей (включая датчики в осях шарнирных узлов 11), отмеченные угловые отклонения могут компенсироваться либо путем их вычитания из полных отклонений, фиксируемых анализатором 10, либо путем постоянной коррекции положения платформы относительно корпуса соответствующего модуля приводами узла 11 (угловая развязка модуля и платформы).
Описанный пример реализации способа не является исключительным, для этого могут быть применены любые известные средства автоматического (или комбинированного, с участием операторов) управления сложными системами, включая средства на базе искусственного интеллекта: для анализа изображений, выработки оптимальных стратегий согласованного регулирования рабочих параметров системы и т. д.
Технико-экономическая эффективность предлагаемого изобретения состоит, во- первых, в снижении затрат материальных ресурсов (массы конструкции 2 цп г, энергетики для управления ею) на построение и эксплуатацию КК, в частности, крупногабаритных переориентируемых антенн высокой излучатель ной мощности ( я г2), во-вторых, в существенном расширении функциональных возможностей формируемых КК путем синергического сочетания в них принципов механического и электродинамического формообразования и стабилизации в пространстве с принципами накопления и излучения энергии (в замкнутых динамических токопроводящих петлях за счет модуляций тока); в-третьих, в применимости известных и относительно простых технологий для изготовления элементов КК, а также в использовании устройств и систем, широко распространенных как в наземной, так и космической технике.
Формула изобретения
Способ создания космических конструкций на базе динамической гибкой связи, включающий развертывание гибкой связи на орбите вокруг небесного тела, обладающего магнитным полем, формирование околокругового замкнутого контура гибкой связи в равновесном положении относительно фиксированной плоскости максимальной проекции контура путем сообщения гибкой связи контурного движения и пропускание электрического тока вдоль связи, отличающийся тем, что, с целью расширения множества создаваемых космических конструкций за счет уменьшения ограничений на пространственную ориентацию плоскости максимальной проекции контура гибкой связи при деформировании контура, определяют угловую Скорость движения центра масс
космической конструкции по орбите вокруг небесного тела и компоненты вектора индукции магнитного поля, в соответствии с которыми скорость V сообщаемого гибкой
связи контурного движения и пропускаемый по ней электрический ток I находят из условий равновесия
V- rr Cos#t3ezeos + #Вх+ By ct$ 0cos V) s|n #И
i - i . - . . . .. . : : ;- :- :
/t-j-CQsflcosp ,
( Д2ВХ + Byctg в cos V j,
где й угловая скорость движения центра масс космической конструкции по орбите вокруг небесного тела;
Вх, Ву, Вг - компоненты вектора индукции магнитного поля соответственно вдоль скорости местной вертикали и бинормали орбиты центра масс конструкции вокруг небесноготела;
в - заданный угол между нормалью плоскости максимальной проекции контура и плоскостью местного горизонта;
V заданный угол между проекцией
нормали на плоскость местного горизонта и орбитальной скоростью центра масс космической конструкции:
г - средний радиус максимальной проекции контура;
ft - погонная масса гибкой связи,
стабилизируют контур, определяя текущее отклонение его максимальной проекции от заданной ориентации и изменяя в соответствии с этим оУклонением скорость
контурного движения и электрический ток в окрестности найденных выше равновесных значений, причем направление скорости и тока выбирают взаимопротивоположными при разных знаках этих величин и одинаковыми в противном случае.
tPiizt
фиг
ЗОЛ
20
Щиг.4
25 26
яи
35 М3738
fit/
| Ад рее в А | |||
| В., Куркин В | |||
| И | |||
| Орбитальные сооружения на базе гибких динамических контуров в орбитальной плоскости | |||
| - В сб | |||
| Крупногабаритные космические конструкции | |||
| Тезисы докладов н-т конференции | |||
| Севастополь, 1990, с | |||
| Машина для добывания торфа и т.п. | 1922 |
|
SU22A1 |
| Паровоз для отопления неспекающейся каменноугольной мелочью | 1916 |
|
SU14A1 |
| Приспособление для автоматической односторонней разгрузки железнодорожных платформ | 1921 |
|
SU48A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Куркин В | |||
| И., Рулев В | |||
| А | |||
| Динамика космической замкнутой троссовой системы в режиме контурного движения | |||
| Сб | |||
| Крупногабаритные космические конструкции, Тезисы докладов н-Т конференции | |||
| Севастополь | |||
| Способ приготовления консистентных мазей | 1919 |
|
SU1990A1 |
| Способ крашения тканей | 1922 |
|
SU62A1 |
