Изобретение относится к области измерительной техники и навигации по геофизическим полям и может быть использовано при навигации подводных аппаратов (ПА).
Системы навигации являются неотъемлемой частью большинства подвижных объектов. Точность и полнота навигационной информации во многом определяют эффективность их функционирования. На практике используются различные методы навигации, отличающиеся применяемыми техническими средствами и природой используемых физических величин (полей).
Предлагаемый способ магнитной навигации ПА основан на определении (уточнении) географических координат его местоположения путем нахождения координат точки на актуальной цифровой магнитной карте (ЦМК) района Мирового океана, в которой имеет место минимальное расхождение между значениями соответствующих компонент индукции магнитного поля Земли (МПЗ), считанными с ЦМК и определенными по результатам измерений внешним относительно ПА магнитометром.
В сравнении с навигацией с применением ГЛОНАСС или GPS, магнитная навигационная система имеет такие ощутимые преимущества, как практическая независимость силы информационного сигнала от характеристик среды распространения, а также малая стоимость применяемых технических средств.
Известен способ магнитной навигации [1. Патент РФ №2530778. Способ магнитной навигации по геомагнитным разрезам. Публ. 2014.10.10], суть которого заключается в том, что по модулям индукции магнитного поля (МП), снятым с эталонной карты МПЗ исследуемого района и измеренным магнитометром, установленным на аэроносителе, строят геомагнитные разрезы. Далее, по выбранным параметрам разреза (координаты объектов, магнитные массы) сопоставляют полученные по измеренному МП и эталонному МПЗ разрезы посредством вычисления некоторого функционала типа корреляционной функции и поиска экстремума этой функции, и определяют координаты носителя. При этом в качестве исходного математического аппарата решения полевой задачи выбрано решение обратной полевой задачи (определение характеристик аномально намагниченного объекта по измеренным значениям модуля индукции его МП).
Недостатками этого способа являются измерение модуля индукции МП (а не вектора), а также, в связи с этим, достаточно сложные методика построения геомагнитных разрезов и математический аппарат.
Известно устройство [2. Патент РФ №2789733. Устройство магнитометрической локальной навигации. Публ. 2023.02.07], применяемое для магнитной навигации летательных аппаратов (при посадке). Это устройство содержит стационарный источник переменного вращающегося магнитного поля, состоящий из двух ортогонально размещенных катушек индуктивности (электромагнитный маяк), и мобильную часть в составе датчика магнитного поля, блока аналого-цифрового преобразования сигналов и блока вычисления координат.
Сложные блок-схема и математический аппарат вычисления координат являются основными недостатками устройства.
Наиболее близким по сущности к заявляемому изобретению является способ [1], который принимается в качестве способа-прототипа.
Задачей, на решение которой направлено заявляемое изобретение, является определение (уточнение) координат местоположения ПА в отсутствие сигналов ГЛОНАСС или GPS с минимальными затратами на привлечение дополнительных технических средств, а также на выполнение необходимых измерительных и вычислительных операций.
Сущность заявляемого изобретения заключается в измерении значений составляющих вектора индукции МП в точке расположения внешнего относительно ПА датчика магнитометра, исключении влияния на результаты измерений собственного МП ПА с помощью текущих значений составляющих магнитного момента (ММ) ПА и определении (уточнении) координат местоположения ПА путем сопоставления компонент МПЗ, полученных по результатам измерений и считанных с актуальной ЦМК.
Технический результат, получаемый при осуществлении заявляемого изобретения, заключается в определении (уточнении) координат ПА при достаточно простых методике реализации способа и его математического аппарата, основанных на стандартных измерительных процедурах и использовании решений прямой полевой задачи (определение параметров МП по значению ММ источника МП).
Указанный технический результат в заявляемом способе магнитной навигации подводных аппаратов, в отличие от способа-прототипа, достигается тем, что одновременно измеряют три составляющие вектора индукции магнитного поля с помощью внешнего относительно ПА трехкомпонентного магнитометра, установленного на координатно стабилизированном носителе, и дистанцию от ПА до датчика магнитометра, рассчитывают, исходя из измеренной дистанции и текущих значений компонент вектора магнитного момента ПА, составляющие вектора индукции магнитного поля ПА в точке нахождения датчика магнитометра и вычитают их из результатов измерений магнитометром соответствующих составляющих индукции, выделяя, тем самым, расчетные значения составляющих индукции МПЗ в системе координат ПА, пересчитывают их в горизонтальную и вертикальную компоненты вектора индукции МПЗ, по которым входят в актуальную цифровую магнитную карту компонент МПЗ данного района Мирового океана и определяют географические координаты местоположения датчика магнитометра, а затем, с учетом измеренной дистанции до него, - географические координаты местоположения ПА.
При этом обобщенное выражение для расчетных значений составляющих индукции МПЗ в системе координат ПА (ВХ, BY, BZ)РМПЗ имеет вид

где: (ВХ, BY, BZ)∑ - значения составляющих вектора индукции МП, измеряемые с помощью внешнего относительно ПА трехкомпонентного магнитометра.
(ВХ, BY, BZ)ПА - значения составляющих вектора индукции МП ПА в точке нахождения датчика магнитометра.
Подготовка процедур магнитной навигации ПА и их реализация выполняются в следующей последовательности:
1) Датчик трехкомпонентного магнитометра «выдвигается» во внешнюю относительно ПА область на немагнитном (или маломагнитном) координатно стабилизированном носителе на расстояние, минимизирующее методическую составляющую погрешности измерений от недипольности ПА как источника МП.
2) Определяются текущие значения компонент вектора магнитного момента ПА (МХ, MY, MZ,)ПА в соответствии с научно-техническими решениями, описанными в патенте РФ №2771186.
3) Периодически, для различных точек i пространства нахождения ПА на постоянном курсе (не менее трех точек) набирается база данных измерительной информации (БДИi,) с включением в нее результатов одновременных измерений трех составляющих вектора индукции МП в системе координат ПА (ВХ, BY, BZ)∑ и дистанции D от ПА до датчика магнитометра.
Примечание 1. - Учитывая, что на географических курсах О - W движения ПА (с учетом магнитного склонения) значения горизонтальной ВН компоненты вектора индукции МПЗ постоянны, для большей информативности измерения целесообразно проводить на географических курсах N - S движения ПА (с учетом магнитного склонения).
4) По текущим значениям компонент (МХ, MY, MZ,)ПА вектора магнитного момента ПА и измеренной дистанции D для каждой точки набора БДИi рассчитываются значения составляющих индукции МП ПА в точке нахождения датчика магнитометра (ВХ, BY, BZ)ПА, которые согласно (1) вычитают из результатов измерений магнитометром соответствующих составляющих индукции, выделяя, тем самым, значения составляющих вектора индукции МПЗ в системе координат ПА.
5) Пересчитывают значения составляющих вектора индукции МПЗ в системе координат ПА в значения горизонтальной ВРН и вертикальной BPZ компонент индукции МПЗ по формулам:

Примечание 2. - Процедуры п.п. 2-5 для каждого точки набора БДИi выполняются для единого момента времени.
6) По расчетным значениям горизонтальной ВРН и вертикальной BPZ компонент вектора индукции МПЗ точек набора БДИi входят в актуальную ЦМК данного района Мирового океана и методом сопоставления определяют географические координаты местоположения датчика магнитометра, а затем, с учетом измеренной дистанции D до него, определяют (уточняют) географические координаты местоположения ПА.
Примечание 3. - В связи с изменениями компонент МПЗ во времени следует использовать актуальную, т.е. соответствующую текущему моменту времени, ЦМК.
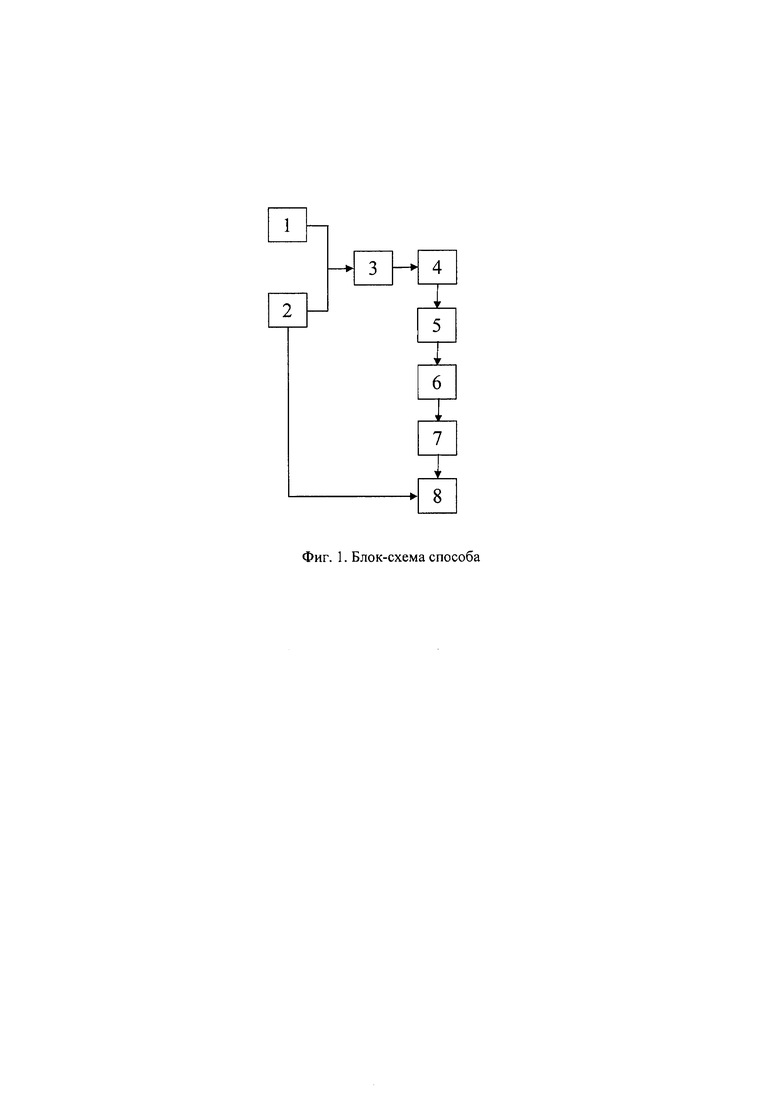
Все перечисленные процедуры способа магнитной навигации проводятся в автоматическом режиме, представляя собой последовательность измерительных и расчетных операций. Блок-схема способа приведена на чертеже (фиг. 1), на, котором показаны:
1 - Блок ввода текущих значений компонент (МХ, MY, MZ,)ПА.
2 - Блок измерения дистанции D от ПА до датчика магнитометра.
3 - Блок расчета значений составляющих индукции (ВХ, BY, BZ)ПА.
4 - Блок измерения значений составляющих индукции (ВХ, BY, BZ)∑.
5 - Блок расчета значений составляющих индукции (ВХ, BY, BZ)РМПЗ.
6 - Блок пересчета значений составляющих индукции (ВХ, BY, BZ)РМПЗ в значения компонент ВРН и BZP МПЗ.
7 - Блок ввода расчетных значений компонент ВРН и BPZ МПЗ в ЦМК, сопоставления значений ВРН и BPZ со значениями BH и BZ ЦМК и определения координат датчика магнитометра.
8 - Блок ввода измеренного значения дистанции D от ПА до датчика магнитометра и определения (уточнения) координат местоположения ПА.
При оценке точности способа необходимо учитывать следующие факторы, оказывающие влияние на точность определения координат местоположения ПА:
- погрешность оценки текущих значений компонент ((ВХ, BY, BZ)ПА, зависящая от погрешности измерения дистанции D от ПА до датчика магнитометра и погрешности оценки текущих значений компонент (МХ, MY, MZ,)ПА.
- погрешность измерения значений составляющих индукции (ВХ, BY, BZ)∑;
- дискретность значений географических координат и компонент ВН и BZ в базе данных ЦМК МПЗ.
Описанные научно-технические решения предлагаемого способа магнитной навигации подводного аппарата реализуются достаточно простым математическим аппаратом, стандартизованными измерительными операциями и автоматически выполняемыми процедурами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ВЕКТОРНЫХ МАГНИТНЫХ ИЗМЕРЕНИЙ | 1991 |
|
RU2069374C1 |
| СПОСОБ ПЕРСОНАЛЬНОЙ АВТОНОМНОЙ НАВИГАЦИИ | 2013 |
|
RU2523753C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МАГНИТНОЙ ДЕВИАЦИИ НА ПОДВИЖНОМ ОБЪЕКТЕ | 2008 |
|
RU2365877C1 |
| Способ ориентации околоземного орбитального космического аппарата | 2021 |
|
RU2779658C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛОКАЛЬНОЙ МАГНИТНОЙ АНОМАЛИИ | 2007 |
|
RU2411550C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТОВ ПУАССОНА ПОДВИЖНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2096818C1 |
| Способ автоматического размагничивания кораблей | 2018 |
|
RU2703765C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ХАРАКТЕРИСТИКИ ПРЕОБРАЗОВАНИЯ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2011 |
|
RU2481593C9 |
| СПОСОБ ОРИЕНТАЦИИ И СИСТЕМА ОРИЕНТАЦИИ ДЛЯ РЕАЛИЗАЦИИ СПОСОБА | 1999 |
|
RU2150412C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ ПОЛЕЙ | 2005 |
|
RU2302644C1 |
Использование: изобретение относится к области измерительной техники и навигации по геофизическим полям и может быть использовано при определении (уточнении) координат местоположения подводного аппарата (ПА). Сущность: измерение значений составляющих вектора индукции магнитного поля (МП) в точке расположения внешнего относительно ПА датчика магнитометра, исключение влияния на результаты измерений собственного МП ПА с помощью текущих значений составляющих магнитного момента (ММ) ПА и определение (уточнение) координат местоположения ПА путем сопоставления компонент магнитного поля Земли, полученных по результатам измерений и считанных с актуальной цифровой магнитной карты района Мирового океана. Технический результат: уточнение координат ПА при достаточно простых методике реализации способа и его математического аппарата, основанных на стандартных измерительных процедурах, и использование решений прямой полевой задачи - определения параметров МП по значению ММ источника МП. 1 ил.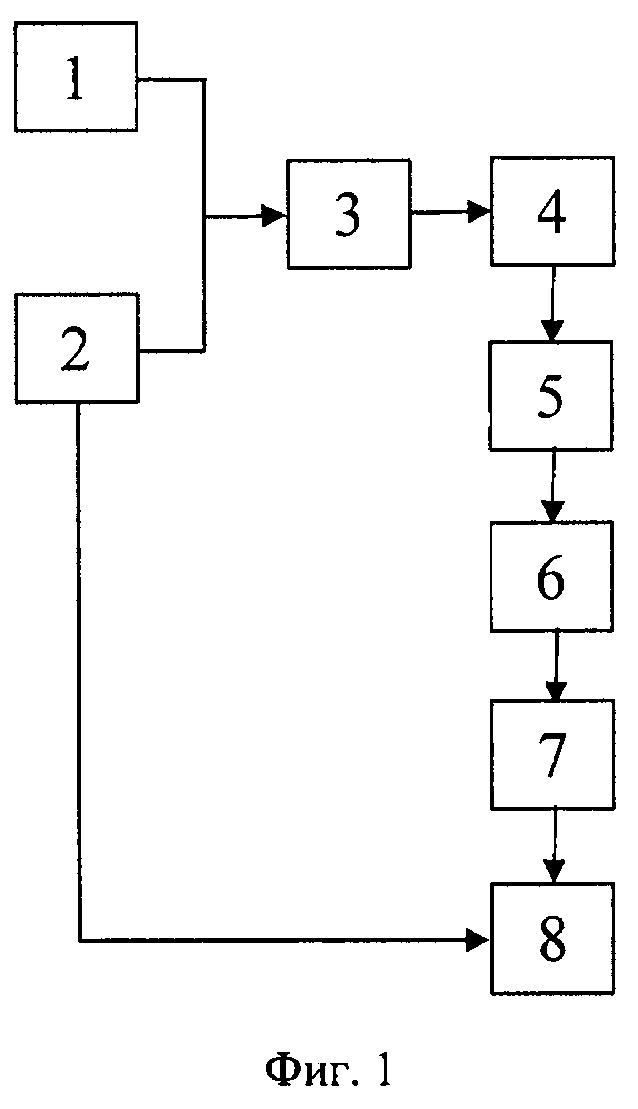
Способ магнитной навигации подводного аппарата (ПА), включающий использование эталонной карты магнитного поля Земли (МПЗ) в районе нахождения ПА, измерение параметров МПЗ с носителя, сопоставление измеренных и эталонных параметров МПЗ и определение координат носителя, отличающийся тем, что одновременно измеряют три составляющие вектора индукции магнитного поля с помощью внешнего относительно ПА трехкомпонентного магнитометра, установленного на координатно стабилизированном носителе, и дистанцию от ПА до датчика магнитометра, рассчитывают, исходя из измеренной дистанции и текущих значений компонент вектора магнитного момента ПА, составляющие вектора индукции магнитного поля ПА в точке нахождения датчика магнитометра и вычитают их из результатов измерений магнитометром соответствующих составляющих индукции, выделяя, тем самым, расчетные значения составляющих индукции МПЗ в системе координат ПА, пересчитывают их в горизонтальную и вертикальную компоненты вектора индукции МПЗ, по которым входят в актуальную цифровую магнитную карту компонент МПЗ данного района Мирового океана и определяют географические координаты местоположения датчика магнитометра, а затем, с учетом измеренной дистанции до него, - географические координаты местоположения ПА.
| НАВИГАЦИОННЫЙ МАГНИТОМЕТР (ВАРИАНТЫ) | 2020 |
|
RU2747015C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ МАГНИТНОГО ПОЛЮСА ЗЕМЛИ | 2020 |
|
RU2754520C1 |
| СПОСОБ МАГНИТНОЙ НАВИГАЦИИ ПО ГЕОМАГНИТНЫМ РАЗРЕЗАМ | 2010 |
|
RU2530778C2 |
| CN 101520328 A, 02.09.2009 | |||
| WO 2005124720 A1, 29.12.2005. | |||

