Изобретение относится к области радиолокации и может быть использовано при обзоре пространства в радиолокационных станциях (РЛС) с последовательным дискретным перемещением луча.
Известен способ обзора пространства радиолокационной станцией с последовательным дискретным перемещением луча, при котором в каждом направлении осматриваемого пространства излучают зондирующий сигнал, принятый затем из того же направления отраженный сигнал в каждой дискрете по дальности сравнивают с порогом обнаружения, при превышении которого принимают решение об обнаружении объекта (Справочник по радиолокации. Под ред. М.Сколника. Пер. с англ. Под ред. К.Н.Трофимова. Том 1. Основы радиолокации. Под ред. Я.С.Ицхоки. М., «Сов. радио», 1976, с.180, 1-й абзац).
Определим следующие понятия.
Пространство, осматриваемое РЛС, - зона регулярного обзора и/или стробы захвата траектории объекта и/или стробы сопровождения траектории объекта.
Направление осматриваемого РЛС пространства - область пространства, охватываемая лучом антенны РЛС; положение направления, как и положение луча, описывается координатами β и ε по азимуту и углу места, соответственно, измеряемыми в сферической системе координат с началом координат в точке стояния РЛС (фиг.1).
Активная несинхронная импульсная помеха - активная помеха, период излучения которой не совпадает с периодом следования зондирующих импульсов данной РЛС.
Недостатком известного способа обзора пространства является отсутствие защищенности РЛС от активных несинхронных импульсных помех. Это объясняется следующим. Так как решение об обнаружении объекта принимается по результатам сравнения с порогом сигнала, принятого после излучения одного зондирующего сигнала, то любое импульсное излучение, поступающее на вход РЛС, в том числе и излучение активной несинхронной импульсной помехи, идентифицируется как сигнал, отраженный от объекта. Если в осматриваемом пространстве создается большое количество несинхронных импульсных помех, то в РЛС обнаруживается большое количество ложных объектов. Это приводит к снижению достоверности выдаваемой РЛС информации, а при достаточно большом количестве несинхронных импульсных помех - к перегрузке канала обработки радиолокационной информации и снижению пропускной способности РЛС.
Наиболее близким к заявляемому является способ обзора пространства РЛС с последовательным дискретным перемещением луча и двухэтапным обнаружением объекта. Способ заключается в следующем.
В осматриваемом в данный момент времени направлении излучают зондирующий сигнал (первого этапа обнаружения), принимают из этого же направления отраженный сигнал и во всех дискретах по дальности принятый сигнал сравнивают с порогом первого этапа обнаружения. Если хотя бы в одной дискрете по дальности на первом этапе обнаружения произошло превышение порога первого этапа обнаружения, то в этом же направлении излучают второй зондирующий сигнал (второго этапа обнаружения), принимают отраженный сигнал и в дискретах по дальности, в которых произошло превышение порога первого этапа обнаружения, принятый сигнал сравнивают с порогом второго этапа обнаружения. Если порог второго этапа обнаружения превышен, то в этих дискретах принимают решение об обнаружении объекта (Справочник по радиолокации. Под ред. М.Сколника. Пер. с англ. Под ред. К.Н.Трофимова. Том 1. Основы радиолокации. Под ред. Я.С.Ицхоки. М., «Сов. радио», 1976, с.200).
Таким образом, в наиболее близком техническом решении в направлении объекта необходимо излучить два зондирующих сигнала: один зондирующий сигнал излучается во всех направлениях осматриваемого пространства на первом этапе обнаружения, второй зондирующий сигнал (на втором этапе обнаружения) излучается в направлениях, в которых принятым на первом этапе сигналом превышен порог первого этапа обнаружения.
Принятие решения об обнаружении объекта по двум принятым сигналам позволяет обеспечить защиту РЛС от активных несинхронных импульсных помех. Защита достигается за счет того, что период поступления излучений активной несинхронной импульсной помехи отличается от периода следования зондирующих сигналов РЛС, а значит и от периода приема сигналов РЛС. Вследствие этого вероятность попадания излучения от помехи в два последовательных временных интервала приема сигналов РЛС мала, следовательно, мала и вероятность обнаружения помехи.
Во всех современных РЛС существует жесткий дефицит временных и энергетических ресурсов, выражающийся в том, что обзор пространства в РЛС может быть осуществлен ограниченным количеством зондирующих сигналов. В связи с этим увеличение в некоторых направлениях количества излучаемых зондирующих сигналов может быть обеспечено только за счет соответствующего сокращения величины осматриваемой зоны.
При обзоре пространства радиолокационной станцией с применением наиболее близкого способа количество зондирующих сигналов, излучаемых на втором этапе обнаружения, равно количеству направлений, в которых произошло превышение порога первого этапа обнаружения. В результате, при большом количестве объектов в пространстве общее количество зондирующих сигналов, которое необходимо излучить для того, чтобы обнаружить все объекты, может превысить допустимый предел и привести к снижению пропускной способности РЛС.
Таким образом, недостатком наиболее близкого способа является значительные временные и энергетические затраты при обзоре пространства.
Заявляемое изобретение направлено на устранение указанного недостатка.
Решаемой задачей (техническим результатом), таким образом, является уменьшение временных и энергетических затрат при обзоре пространства радиолокационной станцией с обеспечением защиты от активных несинхронных импульсных помех.
Указанный технический результат достигается тем, что в способе обзора пространства радиолокационной станцией с последовательным дискретным перемещением луча и двухэтапным обнаружением объекта, включающем излучение в осматриваемом в данный момент времени направлении зондирующего сигнала, прием из этого направления отраженного сигнала, сравнение его во всех дискретах по дальности с порогом первого этапа обнаружения, а также сравнение принятого сигнала с порогом второго этапа обнаружения и принятие решения об обнаружении объекта, согласно изобретению сравнение сигнала, принятого из осматриваемого в данный момент времени направления, с порогом второго этапа обнаружения осуществляют в дискретах по дальности, в которых в соседних направлениях, осмотренных в предыдущие моменты времени, произошло превышение порога первого этапа обнаружения, при этом решение об обнаружении объекта в указанных дискретах принимают при превышении порога второго этапа обнаружения.
Суть заявляемого технического решения заключается в следующем.
Как уже отмечалось, в наиболее близком способе в направлении на объект излучается два зондирующих сигнала: один зондирующий сигнал излучается во всех направлениях осматриваемого пространства на первом этапе обнаружения, второй зондирующий сигнал (на втором этапе обнаружения) излучается в направлениях, в которых принятым на первом этапе сигналом превышен порог первого этапа обнаружения.
В заявляемом изобретении в каждом направлении осматриваемого пространства всегда излучается один зондирующий сигнал.
Возможность использования при двухэтапном обнаружении объекта в каждом направлении осматриваемого пространства одного зондирующего сигнала вместо двух основана на следующих двух предпосылках.
Во-первых, известно, что ближе некоторой дальности сигналы, отраженные от объекта, вследствие перекрытия диаграммы направленности антенны при последовательном перемещении луча, обнаруживаются в нескольких соседних направлениях осматриваемого пространства, то есть по объекту формируется угловой пакет (пачка) обнаруженных сигналов (Кузьмин С.З. Основы теории цифровой обработки радиолокационной информации. М., «Сов. радио», 1974, с.43-45). Наличие углового пакета сигналов, отраженных от объекта, позволяет два этапа обнаружения объекта разнести в пространстве. При этом на первом этапе объект обнаруживают в одних направлениях осматриваемого пространства, а на втором этапе - в соседних к ним направлениям.
Во-вторых, известно, что количество импульсов, излучаемых при зондировании на первом и втором этапах обнаружения без существенного ущерба для оптимальности двухэтапного обнаружения, может быть принято одинаковым (Справочник по радиолокации. Под ред. М.Сколника. Пер. с англ. Под ред. К.Н.Трофимова. Том 1. Основы радиолокации. Под ред. Я.С.Ицхоки. М., «Сов. радио», 1976, с.201). Это позволяет на первом и втором этапах обнаружения использовать одинаковые зондирующие сигналы.
Двухэтапное обнаружение объекта в процессе обзора пространства в заявляемом способе реализуется следующим образом (фиг.2).
По мере перемещения луча от направления к направлению осматриваемого пространства, в каждом направлении излучается зондирующий сигнал, принимается отраженный от объекта сигнал, который во всех дискретах по дальности сравнивается с порогом первого этапа обнаружения. Координаты направлений и дискреты по дальности (номера дискрет), в которых произошло превышение порога первого этапа обнаружения, запоминаются.
Для осматриваемого в данный момент времени направления определяется, произошло ли обнаружение принятого сигнала в соседних осмотренных в предыдущие моменты времени направлениях (то есть на первом этапе обнаружения). Для этого анализируется запомненная информация. Если обнаружение принятого сигнала на первом этапе обнаружения в соседних осмотренных в предыдущие моменты времени направлениях произошло, то в направлении, осматриваемом в данный момент времени, в тех же дискретах по дальности принятый сигнал сравнивают еще и с порогом второго этапа обнаружения, при превышении которого принимается решение об обнаружении объекта (то есть реализуется второй этап обнаружения). Описанные операции повторяются для всех осматриваемых направлений.
Объем запоминаемой информации зависит от технических возможностей при реализации заявляемого способа. В простейшем случае достаточно запоминать координаты только одного направления (М=1) и соответствующие этому направлению дискреты (номера дискрет) по дальности, в которых принятый сигнал превысил порог первого этапа обнаружения. При осмотре следующего направления запомненное направление (став уже предыдущим) будет являться единственным соседним направлением (направлением первого этапа), учитываемым при принятии решения об обнаружении объекта (на втором этапе).
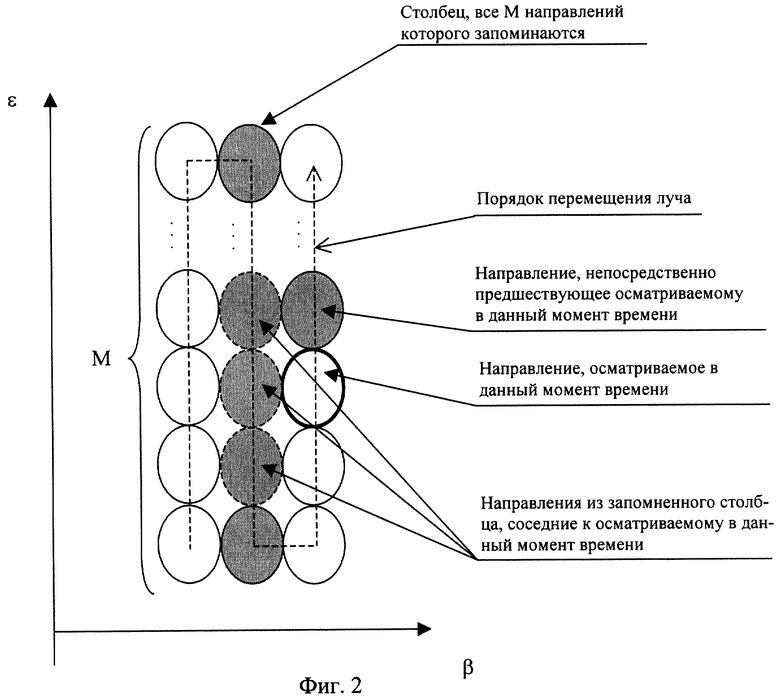
В предпочтительном случае требуется запоминать все направления, которые в процессе обзора пространства в последующие моменты времени будут соседними к осматриваемым. Так, например, при столбцевом обзоре пространства, как показано на фиг.2, должны запоминаться все направления одного столбца (М направлений, обозначенных серой заливкой) и одно направление из осматриваемого столбца, непосредственно предшествующее направлению, осматриваемому в данный момент времени (на фиг.2 - направление, обозначенное сплошным контуром с серой заливкой), то есть всего М+1 направлений. При этом в процессе осмотра направлений текущего столбца (на фиг.2 - столбец, расположенный правее запомненного) соседними к осматриваемому в данный момент времени направлению (на фиг.2 - направление, обозначенное сплошным жирным контуром без заливки) каждый раз будут несколько направлений из запомненного (предыдущего) столбца (на фиг.2 - три направления, обозначенные пунктирным контуром с серой заливкой) и одно направление из осматриваемого столбца, непосредственно предшествующее направлению, осматриваемому в данный момент времени (на фиг.2 - направление, обозначенное сплошным контуром с серой заливкой). Поскольку количество направлений первого этапа обнаружения, учитываемых в предпочтительном случае, больше, чем в простейшем, вероятность обнаружения объекта в нем выше.
Таким образом, в каждом направлении осматриваемого пространства реализуется двухэтапное обнаружение объекта, и при этом в каждом направлении излучается один зондирующий сигнал. То есть достигается уменьшение общего количества излучений зондирующего сигнала, необходимого для обзора пространства.
Заявляемый способ обеспечивает и защиту от активных несинхронных импульсных помех. Защита достигается за счет того, что решение об обнаружении объекта принимается по результатам приема сигналов, разнесенных во времени. А поскольку период поступления излучений активной несинхронной импульсной помехи отличается от периода следования зондирующих сигналов РЛС, а значит и от периода приема сигналов РЛС, то вероятность попадания излучения от помехи в два последовательных временных интервала приема сигналов РЛС мала, следовательно, мала и вероятность обнаружения помехи.
Таким образом достигается заявляемый технический результат.
Дополнительным техническим результатом заявляемого технического решения является увеличение защищенности от пассивных помех, в частности от метеообразований. Поскольку сигналы принимаются из двух пространственно разнесенных направлений, то возникает дополнительная (к существующей временной) пространственная раскорреляция отражений от указанных помех, в результате которой вероятность обнаружения отражений от таких помех уменьшается.
Изобретение иллюстрируется следующими чертежами.
Фиг.1 - фрагмент осматриваемого пространства для одной дискреты по дальности в наиболее близком способе; показаны осматриваемые направления при обзоре пространства (в виде овалов).
Фиг.2 - фрагмент осматриваемого пространства для одной дискреты по дальности в заявляемом способе; пунктирными стрелками обозначен порядок осмотра пространства (приведенный порядок приведен в качестве примера, так как последовательность осмотра пространства может быть любой); серой заливкой обозначены запоминаемые направления; жирным сплошным контуром без заливки обозначено направление, осматриваемое в данный момент времени.
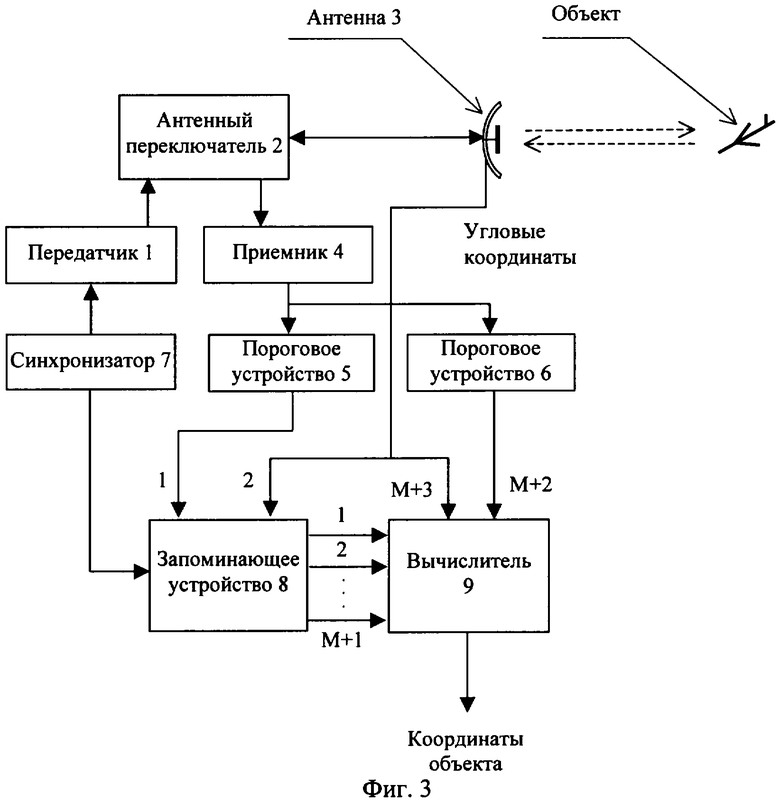
Заявляемый способ может быть реализован в РЛС (фиг.3), содержащей передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, пороговое устройство 6, синхронизатор 7, запоминающее устройство 8, вычислитель 9, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход которого соединен со входом порогового устройства 5 и со входом порогового устройства 6, выходы порогового устройства 5 и координатный выход антенны 3 соединены соответственно с первым и вторым входами запоминающего устройства 8, М+1 выходов которого соединены с соответствующим количеством входов вычислителя 9, выход порогового устройства 6 и координатный выход антенны 3 соединены соответственно с М+2-м и М+3-м входами вычислителя 9, первый и второй выходы синхронизатора 7 соединены с синхровходами передатчика 1 и запоминающего устройства 8 соответственно, выход вычислителя 9 является выходом РЛС.
Работа РЛС происходит следующим образом. В передатчике 1 по командам синхронизатора 7 (импульсам синхронизации) формируются зондирующие сигналы, которые посредством антенного переключателя 2 подаются в антенну 3, с помощью которой последовательно излучаются в каждое направление осматриваемого пространства. Отраженный от объекта сигнал принимается антенной 3 и поступает в приемник 4.
С выхода приемника 4 сигнал поступает на входы первого порогового устройства 5 и второго порогового устройства 6, в которых сравнивается с порогами первого и второго этапов обнаружения соответственно. Сигналы, уровень которых превышает пороговый, проходят на выходы пороговых устройств. Сигналы с выходов порогового устройства 5 и сигналы, пропорциональные координатам луча антенны 3, поступают соответственно на первый и второй входы запоминающего устройства 8, где в ходе обзора пространства последовательно запоминаются.
Сигнал с выхода порогового устройства 6 и сигналы, пропорциональные угловым координатам луча антенны 3, подаются соответственно на М+2-й и М+3-й входы вычислителя 9.
По командам с синхронизатора 7 из запоминающего устройства 8 извлекаются записанные в них данные (угловых координаты М+1 запомненных направлений и соответствующие им дискреты (номера дискрет) по дальности, в которых превышен порог первого этапа обнаружения) и посредством М+1 выходов подаются в вычислитель 9. В вычислителе 9 осуществляется сравнение угловых координат направления, осматриваемого в данный момент времени, и направлений, информация по которым хранится в запоминающем устройстве 8. В результате, определяются направления, являющиеся соседними к осматриваемому в данный момент времени, в которых существуют дискреты по дальности, в которых произошло превышение порога первого этапа обнаружения. Для этих дискрет принятый сигнал осматриваемого в данный момент времени направления сравнивается с порогом второго этапа обнаружения, и принимается решение об обнаружении объекта, если произошло превышение указанного порога. Координаты обнаруженного объекта выдаются с выхода вычислителя 9.
Таким образом реализуется заявляемый способ обзора пространства.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБЗОРА ПРОСТРАНСТВА РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2012 |
|
RU2508559C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ЦЕЛЕЙ | 2010 |
|
RU2420756C1 |
| СПОСОБ ОБЗОРА ЗОНЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2009 |
|
RU2408028C1 |
| СПОСОБ ЗАЩИТЫ ОТ ПАССИВНЫХ ПОМЕХ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2584696C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА (ВАРИАНТЫ) | 2015 |
|
RU2596851C1 |
| СПОСОБ ЗАЩИТЫ ОБЗОРНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПАССИВНЫХ ПОМЕХ В ВИДЕ ОТРАЖЕНИЙ ОТ ЗЕМНОЙ ПОВЕРХНОСТИ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2403589C1 |
| Способ двухэтапного радиолокационного обзора пространства (варианты) | 2016 |
|
RU2637784C1 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2007 |
|
RU2362182C1 |
| СПОСОБ ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ С ФАЗИРОВАННОЙ АНТЕННОЙ РЕШЕТКОЙ ОТ ПАССИВНЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1990 |
|
RU2237906C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА | 2011 |
|
RU2478981C2 |
Изобретение может быть использовано при обзоре пространства в радиолокационных станциях (РЛС) с последовательным дискретным перемещением луча. Достигаемым техническим результатом является уменьшение временных и энергетических затрат при обзоре пространства с обеспечением защиты от активных несинхронных импульсных помех. Указанный результат достигается за счет того, что в заявленном способе осуществляют излучение в осматриваемом в данный момент времени направлении зондирующего сигнала, прием из этого же направления отраженного сигнала, сравнение его во всех дискретах по дальности с порогом первого этапа обнаружения, сравнение принятого сигнала с порогом второго этапа обнаружения и принятие решения об обнаружении объекта, при этом сравнение сигнала, принятого из осматриваемого в данный момент времени направления, с порогом второго этапа обнаружения осуществляют в дискретах по дальности, в которых в соседних направлениях, осмотренных в предыдущие моменты времени, произошло превышение порога первого этапа обнаружения, решение об обнаружении объекта в указанных дискретах принимают при превышении порога второго этапа обнаружения. 3 ил.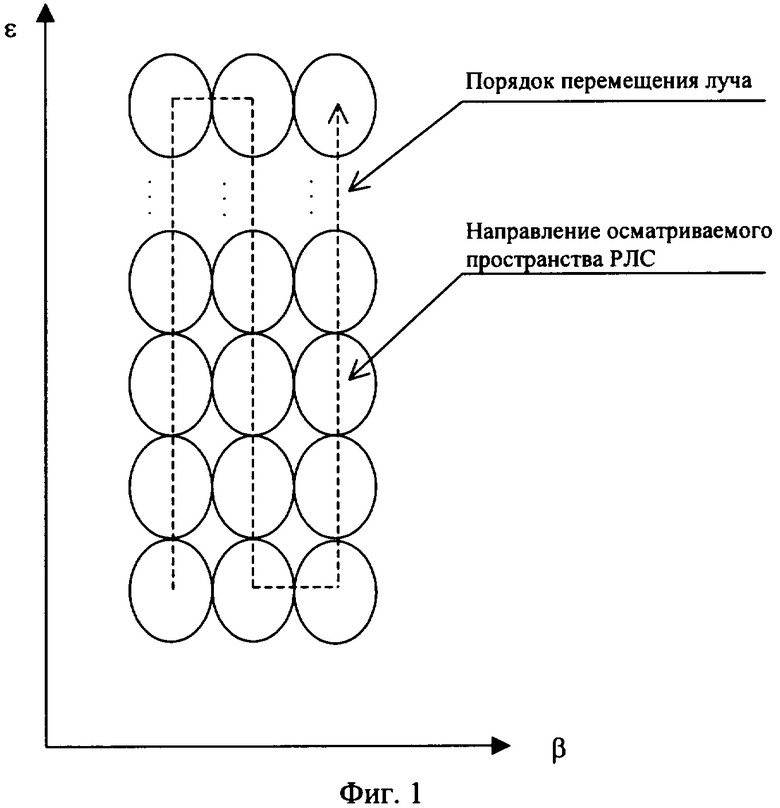
Способ обзора пространства радиолокационной станцией с последовательным дискретным перемещением луча и двухэтапным обнаружением объекта, включающий излучение в осматриваемом в данный момент времени направлении зондирующего сигнала, прием из этого направления отраженного сигнала, сравнение его во всех дискретах по дальности с порогом первого этапа обнаружения, а также сравнение принятого сигнала с порогом второго этапа обнаружения и принятие решения об обнаружении объекта, отличающийся тем, что координаты направлений и дискреты по дальности, в которых произошло превышение порога первого этапа обнаружения, запоминают, а сравнение сигнала, принятого из осматриваемого в данный момент времени направления, с порогом второго этапа обнаружения осуществляют при одном и том же зондирующем сигнале в каждом направлении в дискретах по дальности, в которых в соседних направлениях, осмотренных и запомненных в предыдущие моменты времени, произошло превышение порога первого этапа обнаружения, при этом решение об обнаружении объекта в указанных дискретах принимают при превышении порога второго этапа обнаружения.
| Справочник по радиолокации | |||
| / Под ред | |||
| СКОЛНИКА | |||
| - М.: Сов | |||
| радио, 1976, с.200-205 | |||
| СПОСОБ СЕЛЕКЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 1995 |
|
RU2083996C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 2002 |
|
RU2240576C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И СОПРОВОЖДЕНИЯ ОБЪЕКТА | 2002 |
|
RU2218581C2 |
| WO 2004074866 A1, 02.09.2004 | |||
| US 20050128124 A1, 16.05.2006. | |||

