Изобретения относятся к области радиолокации и могут использоваться в мобильных обзорных радиолокационных станциях (РЛС) для защиты от пассивных помех в процессе осмотра зоны обзора.
В зоне обзора РЛС, как правило, обнаруживается множество мешающих отражений (пассивных помех), которые, поступая в систему обработки радиолокационной информации, перегружают ее, уменьшая таким образом пропускную способность РЛС. Появление пассивных помех в зоне обзора РЛС объясняется как естественными факторами, например подстилающей поверхностью, неоднородностями атмосферы, птицами, так и искусственными, например дипольными отражателями, сбрасываемыми противником для маскировки своих средств нападения и перегрузки системы обработки информации РЛС.
Известен способ защиты от пассивных помех, основанный на череспериодной компенсации (ЧПК) принятых сигналов (Теоретические основы радиолокации. /Под ред. Я.Д. Ширмана. - М.: Сов. радио, 1970, с. 467). Уменьшение количества обнаружений пассивных помех достигается за счет излучения в направлении зоны обзора не менее двух импульсов и последующего вычитания отраженных сигналов.
Поскольку в мобильных обзорных РЛС всегда существует жесткий дефицит временных и энергетических ресурсов, то использование систем ЧПК возможно только в весьма ограниченной области пространства - как правило, только в нижних положениях луча РЛС и на ограниченных дальностях. Это является недостатком известных технических решений.
Наиболее близким способом защиты от пассивных помех является способ, включающий излучение зондирующего сигнала, прием отраженных сигналов, сравнение сигналов, принятых в каждой дискрете дальности, с порогом обнаружения, определение границ областей повышенной концентрации обнаруженных сигналов, исключение из обработки (бланкирование) сигналов в упомянутых областях (Ангельский Р.Д., Шестов И.В. Отечественные зенитные ракетные комплексы: Иллюстрированный справочник / Р.Д. Ангельский. - М.: ООО «Издательство Астрель»: ООО «Издательство АСТ», 2002. - 256 с.: ил. - (Военная техника)).
Недостатком наиболее близкого способа является высокая вероятность пропуска сигналов, отраженных от целей. Это объясняется тем, что в процессе бланкирования исключаются как пассивные помехи, так и сигналы от целей, оказавшиеся в пределах границ области бланкирования.
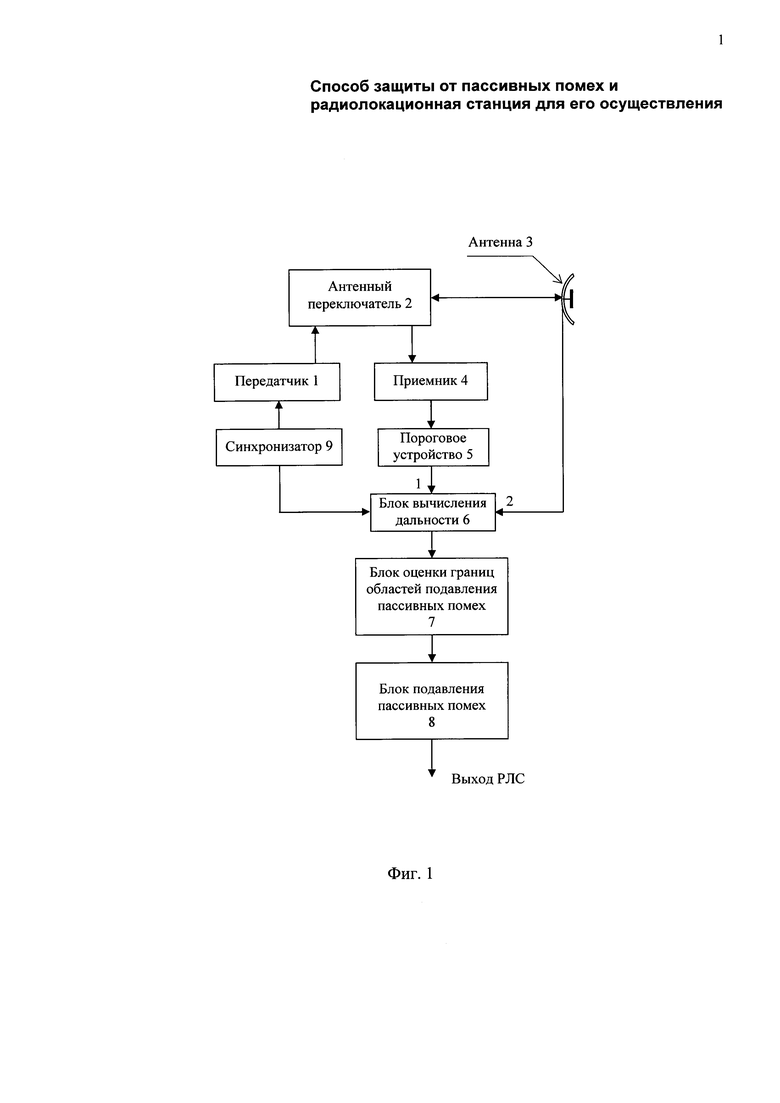
Наиболее близкой по технической сущности к заявляемой является РЛС (патент РФ №2291466), содержащая (фиг. 1) передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, блок вычисления дальности 6, блок оценки границ областей подавления пассивных помех 7, блок подавления пассивных помех 8, синхронизатор 9, при этом выход передатчика 1 соединен с входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен с входом приемника 4, выход которого соединен с входом порогового устройства 5, выход которого соединен с первым входом блока вычисления дальности 6, второй вход которого соединен с координатным выходом антенны 3, выход блока вычисления дальности 6 соединен с входом блока оценки границ областей подавления пассивных помех 7, выход которого соединен с входом блока подавления пассивных помех 8, первый и второй выходы синхронизатора 9 соединены с синхровходами передатчика 1 и блока вычисления дальности 6 соответственно, выход блока 8 является выходом РЛС.
Работа РЛС, наиболее близкой к заявляемой, происходит следующим образом. В передатчике 1 по командам синхронизатора 9 (импульсам синхронизации) формируются зондирующие сигналы, которые в процессе обзора пространства с помощью антенны 2 излучаются в пространство. Отраженные сигналы, принимаемые антенной 2, поступают в приемник 4, с выхода которого подаются на вход порогового устройства 5, где сравниваются с порогом обнаружения, который задается исходя из допустимой вероятности ложных тревог. Сигналы, уровень которых превышает пороговый, проходят на выход порогового устройства 5 и поступают на первый вход блока вычисления дальности 6, на второй вход которого с координатного выхода антенны 3 подаются угловые координаты положения луча - угол места и азимут. В блоке вычисления дальности 6 известным способом (Теоретические основы радиолокации. /Под ред. Я.Д. Ширмана. - М.: Сов. радио, 1970, с. 219) осуществляется вычисление дальности до источника отраженных сигналов, то есть определяются номера дискрет, в которых произошло превышение порога обнаружения. Дискретам дальности, в которых произошло обнаружение сигнала, ставятся в соответствие угловые координаты луча. Координаты дискрет (дальность, угол места, азимут), в которых амплитуда сигнала превысила порог обнаружения, с выхода блока вычисления дальности 6 поступают на вход блока оценки границ областей подавления пассивных помех 7, в котором оператором РЛС оцениваются границы областей скопления пассивных помех, которые требуется подавить. Координаты границ областей подавления пассивных помех подаются в блок подавления пассивных помех 8, в котором сигналы, попавшие в указанную область, исключаются из дальнейшей обработки.
В наиболее близкой РЛС цели, попавшие в область бланкирования, оказываются пропущенными. Это является недостатком устройства.
Решаемой задачей (техническим результатом) заявляемых способа и РЛС, таким образом, является увеличение защищенности мобильной обзорной РЛС от пассивных помех при достаточно малой допустимой вероятности пропуска целей.
Указанный результат достигается тем, что в способе защиты радиолокационной станции от пассивных помех, включающем излучение зондирующего сигнала, прием отраженных сигналов, сравнение сигналов, принятых в каждой дискрете дальности, с порогом обнаружения, согласно изобретению упомянутые сигналы, превысившие порог обнаружения в одиночных дискретах на дальностях, не превышающих пороговую, считают пассивными помехами, в качестве пороговой дальности устанавливают дальность, ближе которой сигнал от цели с минимальной заданной эффективной площадью рассеяния (ЭПР) превышает порог обнаружения в одиночной дискрете дальности с вероятностью, не более заданной достаточно малой величины.
Технический результат достигается также тем, что в радиолокационной станции, содержащей передатчик, антенный переключатель, антенну, приемник, пороговое устройство, блок вычисления дальности, блок подавления пассивных помех, синхронизатор, при этом выход передатчика соединен с входом антенного переключателя, вход/выход которого соединен с антенной, выход антенного переключателя соединен с входом приемника, выход которого соединен с входом порогового устройства, выход которого соединен с первым входом блока вычисления дальности, второй вход которого соединен с координатным выходом антенны, первый и второй выходы синхронизатора соединены с синхровходами передатчика и блока вычисления дальности соответственно, выход блока подавления помех является выходом РЛС, согласно изобретению введены блок оценки количества превышений порога обнаружения и запоминающее устройство пороговой дальности, причем первый вход блока оценки количества превышений порога обнаружения соединен с выходом блока вычисления дальности, второй его вход соединен с выходом запоминающего устройства пороговой дальности, а выход соединен с входом блока подавления пассивных помех.
Суть заявляемых технических решений заключается в следующем.
Известно, что с увеличением ЭПР отражателя или уменьшением дальности до него амплитуда отраженного и принятого радиолокационной станцией сигнала увеличивается. Поэтому при сравнении принятого сигнала с порогом обнаружения сигнал с большей амплитудой превышает порог обнаружения в большем количестве дискрет дальности подряд, чем сигнал с меньшей амплитудой.
Так, если при обращении к цели, находящейся на некоторой дальности от РЛС, отраженный сигнал имеет амплитуду, при которой порог обнаружения превышается в нескольких дискретах дальности подряд, то с увеличением дальности количество таких дискрет уменьшается, а начиная с некоторой дальности, сигнал от цели будет превышать порог обнаружения только в одной (далее по тексту - в одиночной) дискрете дальности (при дальнейшем увеличении дальности обнаружение прекратится). На этой зависимости основано изобретение.
Диапазон параметров целей, для обнаружения которых предназначена РЛС, как правило, задается. В изобретении по цели с минимальной заданной ЭПР определяется пороговая дальность, как дальность, ближе которой сигнал от цели с такой ЭПР превышает порог обнаружения в одиночной дискрете дальности с вероятностью, не более заданной достаточно малой величины (например, 0,01-0,05). Таким образом, на дальности ближе пороговой все заданные для РЛС цели с высокой вероятностью (соответственно не менее 0,99-0,95) будут обнаруживаться в двух и более дискретах дальности подряд. Сигналы, превышающие порог обнаружения на этом интервале дальностей только в одиночной дискрете дальности, считаются помехами и исключаются из дальнейшей обработки.
Преимуществом способа является то, что дополнительного времени (энергии) для защиты от пассивных помех не требуется, то есть защита от пассивных помех осуществляется в течение осмотра зоны обзора.
Таким образом достигается заявляемый технический результат.
Изобретение иллюстрируются следующими чертежами.
Фиг. 1 - радиолокационная станция, наиболее близкая к заявляемой.
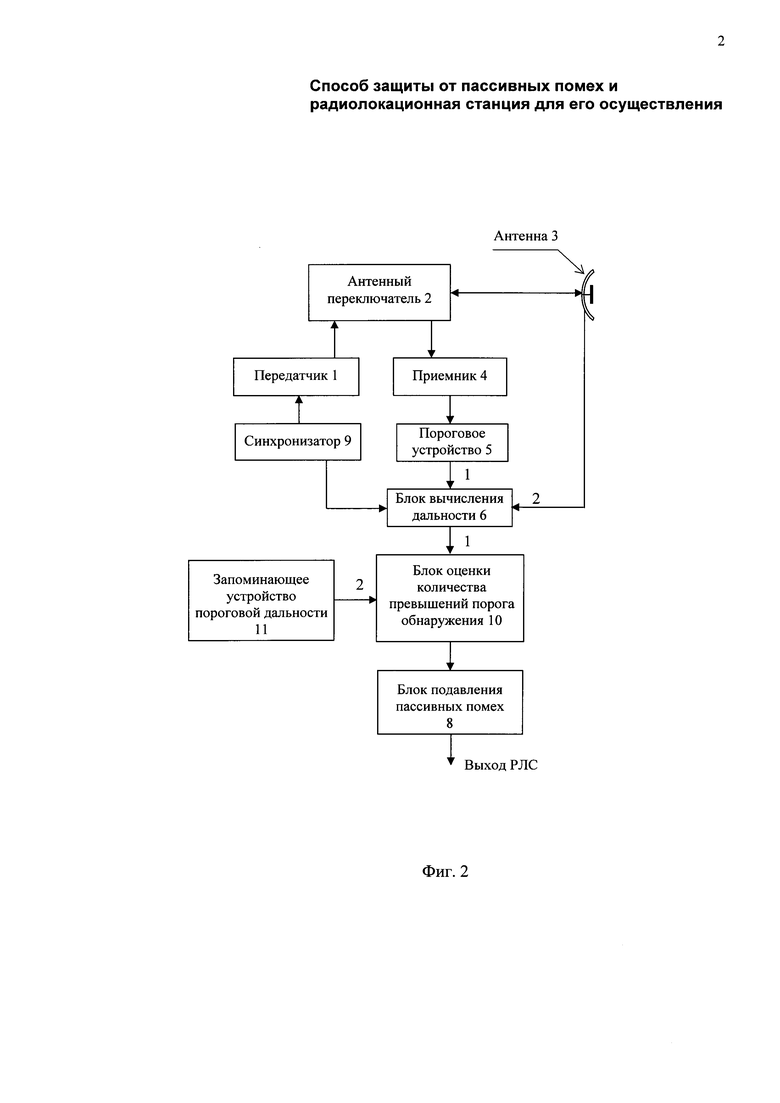
Фиг. 2 - заявляемая радиолокационная станция, осуществляющая заявляемый способ.
Заявляемый способ осуществляется с помощью заявляемой РЛС, которая содержит (фиг. 2) передатчик 1, антенный переключатель 2, антенну 3, приемник 4, пороговое устройство 5, блок вычисления дальности 6, блок подавления пассивных помех 8, синхронизатор 9, блок оценки количества превышений порога обнаружения 10, запоминающее устройство пороговой дальности 11, при этом выход передатчика 1 соединен с входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен с входом приемника 4, выход которого соединен с входом порогового устройства 5, выход которого соединен с первым входом блока вычисления дальности 6, второй вход которого соединен с координатным выходом антенны 3, выход блока вычисления дальности 6 соединен с первым входом блока оценки количества превышений порога обнаружения 10, второй вход которого соединен с выходом запоминающего устройства пороговой дальности 11, выход блока оценки количества превышений порога обнаружения 10 соединен с входом блока подавления пассивных помех 8, выход которого является выходом РЛС, первый и второй выходы синхронизатора 9 соединены с синхровходами передатчика 1 и блока вычисления дальности 5 соответственно.
Заявляемая РЛС, с помощью которой осуществляется заявляемый способ, может быть выполнена с использованием следующих функциональных элементов.
Передатчик 1 - импульсного типа (Педак A.M. и др. Справочник по основам радиолокационной техники. /Под ред. В.В. Дружинина. Военное издательство, 1967, с. 278).
Антенный переключатель 2 - выполнен на циркуляторе (Педак A.M. и др. Справочник по основам радиолокационной техники. /Под ред. В.В. Дружинина. Военное издательство, 1967, с. 146-147).
Антенна 3 - фазированная антенная решетка с электронным сканированием по одной или обеим угловым координатам и с круговым механическим вращением (Справочник по радиолокации. /Под ред. М. Сколника, т. 2. - М.: Сов. радио, 1977, с. 132-138).
Приемник 4 - супергетеродинного типа (Педак A.M. и др. Справочник по основам радиолокационной техники. /Под ред. В.В. Дружинина. Военное издательство, 1967, с. 343-344).
Блок вычисления дальности 6, блок подавления пассивных помех 8, блок оценки количества превышений порога обнаружения 10, запоминающее устройство пороговой дальности 11 - цифровые элементы, выполненные на стандартных микросхемах (Интегральные микросхемы. Справочник. /Под ред. Б.В. Тарабрина. - М.: Радио и связь, 1984).
Синхронизатор 9 - выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). /Под ред. В.В. Григорина-Рябова. - М.: Сов. радио, 1970, с. 602-603).
Радиолокационная станция, с помощью которой осуществляется заявляемый способ, работает следующим образом.
В передатчике 1 по командам синхронизатора 9 (импульсам синхронизации) формируются зондирующие сигналы, которые в процессе обзора пространства с помощью антенны 2 излучаются в пространство. Отраженные сигналы, принимаемые антенной 2, поступают в приемник 4, с выхода которого подаются на вход порогового устройства 5, где сравниваются с порогом обнаружения, который задается исходя из допустимой вероятности ложных тревог. Сигналы, уровень которых превышает пороговый, проходят на выход порогового устройства 5 и поступают на первый вход блока вычисления дальности 6, на второй вход которого с координатного выхода антенны 3 подаются угловые координаты положения луча. В блоке вычисления дальности 6 известным способом осуществляется вычисление дальности до источника отраженных сигналов (определение номеров дискрет, в которых произошло превышение порога обнаружения). Дискретам дальности, в которых произошло обнаружение сигнала, ставятся в соответствие угловые координаты луча - угол места и азимут. Координаты дискрет (дальность, угол места, азимут), в которых амплитуда сигнала превысила порог обнаружения, с выхода блока вычисления дальности 6 поступают на вход блока оценки количества превышений порога обнаружения 10. В блоке 10 в дискретах на дальности, не превышающей пороговую дальность, значение которой поступает из запоминающего устройства пороговой дальности 11, определяют дискреты дальности, являющиеся одиночными. По таким дискретам принимается решение о их принадлежности к пассивным помехам и им присваивается соответствующий признак. Координаты этих дискрет подаются в блок подавления пассивных помех, где они исключаются из дальнейшей обработки. Координаты остальных обнаруженных сигналов выдаются на выход РЛС в качестве координат целей.
Таким образом достигается заявляемый технический результат.
Изобретения относятся к области радиолокации и могут использоваться в мобильных обзорных радиолокационных станциях (РЛС) для защиты от пассивных помех в процессе осмотра зоны обзора. Достигаемый технический результат изобретения - увеличение защищенности мобильной обзорной РЛС от пассивных помех при достаточно малой допустимой вероятности пропуска целей. Технический результат достигается тем, что в способе защиты радиолокационной станции от пассивных помех отраженные сигналы, принятые в каждой дискрете дальности, превысившие порог обнаружения в одиночных дискретах на дальностях, не превышающих пороговую, считают пассивными помехами, в качестве пороговой дальности используют дальность, ближе которой сигнал от цели с минимальной заданной эффективной площадью рассеяния превышает порог обнаружения в одиночной дискрете дальности с вероятностью не более заданной достаточно малой величины. 2 н.п. ф-лы, 2 ил.
1. Способ защиты радиолокационной станции от пассивных помех, включающий излучение зондирующего сигнала, прием отраженных сигналов, сравнение сигналов, принятых в каждой дискрете дальности, с порогом обнаружения, отличающийся тем, что упомянутые сигналы, превысившие порог обнаружения в одиночных дискретах на дальностях, не превышающих пороговую, считают пассивными помехами, в качестве пороговой дальности устанавливают дальность, ближе которой сигнал от цели с минимальной заданной эффективной площадью рассеяния превышает порог обнаружения в одиночной дискрете дальности с вероятностью, не более заданной достаточно малой величины.
2. Радиолокационная станция, содержащая передатчик, антенный переключатель, антенну, приемник, пороговое устройство, блок вычисления дальности, блок подавления пассивных помех, синхронизатор, при этом выход передатчика соединен с входом антенного переключателя, вход/выход которого соединен с антенной, выход антенного переключателя соединен с входом приемника, выход которого соединен с входом порогового устройства, выход которого соединен с первым входом блока вычисления дальности, второй вход которого соединен с координатным выходом антенны, первый и второй выходы синхронизатора соединены с синхровходами передатчика и блока вычисления дальности соответственно, выход блока подавления помех является выходом РЛС, отличающаяся тем, что введены блок оценки количества превышений порога обнаружения и запоминающее устройство пороговой дальности, причем первый вход блока оценки количества превышений порога обнаружения соединен с выходом блока вычисления дальности, второй его вход соединен с выходом запоминающего устройства пороговой дальности, а выход соединен с входом блока подавления пассивных помех.
| СПОСОБ ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ ОБЪЕКТА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2291466C1 |
| АДАПТИВНОЕ УСТРОЙСТВО ЗАЩИТЫ РАДИОЛОКАЦИОННОЙ СТАНЦИИ ОТ ПАССИВНЫХ ПОМЕХ | 1994 |
|
RU2097781C1 |
| СПОСОБ ПОДАВЛЕНИЯ ПАССИВНЫХ ПОМЕХ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2002 |
|
RU2227308C2 |
| УСТРОЙСТВО ЗАЩИТЫ ОТ ПАССИВНЫХ ПОМЕХ РАДИОЛОКАЦИОННЫХ СТАНЦИЙ С СЕЛЕКЦИЕЙ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1963 |
|
SU1840386A1 |
| US 6867726 B1, 15.03.2005 | |||
| US 6268821 B1, 31.07.2001 | |||
| EP 1960807 B1, 03.06.2009 | |||
| WO 2003023437 A2, 20.03.2003. | |||

