Изобретение относится к области радиолокации и может быть использовано в обзорных радиолокационных станциях (РЛС) с фазированной антенной решеткой (ФАР) при обнаружении воздушных целей.
Известен способ радиолокационного обнаружения цели в направлении зоны обзора, при котором в это направлении излучают зондирующий сигнал, принятый затем из того же направления, отраженный сигнал в каждой дискрете по дальности сравнивают с порогом обнаружения, при превышении которого принимают решение об обнаружении цели (Справочник по радиолокации. Под ред. М.Сколника. Пер. с англ. Под ред. К.Н.Трофимова. Том 1. Основы радиолокации. Под ред. Я.С.Ицхоки. М., Сов. радио, 1976, с.180, Обнаружитель с фиксированным объемом выборки).
В известном способе решение об обнаружении цели принимается по результатам одного зондирования, поэтому любой сигнал, близкий по структуре к излученному сигналу, превысивший порог обнаружения, считается целью. К таким сигналам, в частности, относятся несинхронные импульсные помехи, специально создаваемые противником для подавления РЛС. Таким образом, известный способ оказывается незащищенным от несинхронных импульсных помех. Это является недостатком известного способа.
Наиболее близким к заявляемому способу является способ радиолокационного обнаружения целей в направлении зоны обзора, при котором в это направлении излучают два зондирующих сигнала - сигнал первого этапа обнаружения и сигнал второго этапа обнаружения, при этом после излучения зондирующего сигнала первого этапа обнаружения принимают отраженный сигнал, сравнивают его с порогом первого этапа обнаружения во всех дискретах по дальности, после чего для сигналов, превысивших порог первого этапа обнаружения, вычисляют границы стробов обнаружения цели для второго этапа обнаружения, излучают зондирующий сигнал второго этапа обнаружения, принимают отраженный сигнал, сравнивают его с порогом второго этапа обнаружения в дискретах по дальности, попадающих в стробы обнаружения, принимают решение об обнаружении цели, если принятый сигнал превысил порог второго этапа обнаружения (Справочник по радиолокации. Под ред. М.Сколника. Пер. с англ. Под ред. К.Н.Трофимова. Том 1. Основы радиолокации. Под ред. Я.С.Ицхоки. М., Сов. радио, 1976, с.200, Двухэтапный обнаружитель).
В наиболее близком способе уровни порогов обнаружения оптимизированы для достижения максимальной вероятности обнаружения цели при допустимом числе ложных тревог и минимальных затратах времени (энергии) в каждом направлении зоны обзора при использовании известных зондирующих сигналов на этапах обнаружения.
В наиболее близком способе за цель принимается сигнал, обнаруженный на первом этапе обнаружения при подтверждении его обнаружения в стробе по дальности на втором этапе обнаружения. Дальняя (RД) и ближняя (RБ) границы строба вычисляются в соответствии с формулой:

где RС - дальность обнаружения принятого сигнала на первом этапе обнаружения;
vR max - максимальная вероятная радиальная составляющая скорости цели;
Δt - интервал времени между обращениями к цели на первом и втором этапах обнаружения;
σR - среднеквадратическая ошибка измерения радиальной дальности;
ΔRдопл - доплеровский сдвиг радиальной скорости цели.
Двухэтапный способ обнаружения имеет значительно лучшую защищенность от несинхронных импульсных помех. Это объясняется тем, что флюктуации по дальности отраженного сигнала от цели от зондирования к зондированию значительно меньше флюктуаций несинхронной импульсной помехи и вероятность обнаружения цели на двух этапах значительно выше, чем несинхронной импульсной помехи.
В наиболее близком способе в случае, когда все цели, обнаруженные в направлении зоны обзора на первом этапе, расположены на дальностях, значительно меньших, чем инструментальная дальность РЛС (инструментальная дальность РЛС - максимальная дальность обнаружения цели при зондирующем сигнале с заданной частотой повторения), а на втором этапе применяется сигнал с той же частотой повторения, что и на первом этапе, дальность обнаружения цели на втором этапе значительно превышает необходимую дальность, так как при этом осматривается и наиболее удаленная область (область по дальности от наиболее удаленной цели до инструментальной дальности), где нет обнаруженных на первом этапе целей. В результате затраты времени на осмотр зоны и обнаружение целей также превышают необходимые, и, поскольку общее время на обзор зоны ограничено, осматриваемая зона обзора по угловым координатам сокращается. Это является недостатком наиболее близкого способа.
Заявляемое изобретение направлено на устранение указанного недостатка.
Решаемой задачей (техническим результатом), таким образом, является уменьшение затрат времени на осмотр зоны и обнаружение целей.
Указанный технический результат достигается тем, что в способе радиолокационного обнаружения целей, включающем излучение в каждом направлении зоны обзора радиолокационной станции зондирующего сигнала первого этапа обнаружения, излучение зондирующего сигнала второго этапа обнаружения, если на первом этапе произошло обнаружение, с соответствующими частотами повторения, сравнение принятого на каждом этапе сигнала с порогами соответственно первого и второго этапов обнаружения, принятие решения об обнаружении цели, согласно изобретению излучаемый зондирующий сигнал второго этапа обнаружения выбирают исходя из дальности наиболее удаленной цели, обнаруженной на первом этапе обнаружения, следующим образом:
дополнительно к зондирующему сигналу второго этапа обнаружения предварительно вводят n-1 зондирующих сигналов второго этапа обнаружения с более высокими частотами повторения и n-1 соответствующих порогов обнаружения, где n - общее количество зондирующих сигналов второго этапа с номерами i=1, …, n, при этом уровни дополнительных n-1 порогов обнаружения выбирают исходя из максимальной вероятности обнаружения цели при допустимом числе ложных тревог и минимальных затратах времени (энергии) в направлении зоны обзора;
предварительно вводят n порогов анализа, при этом номер каждого из них (i) совпадает с номером зондирующего сигнала второго этапа обнаружения; уровни порогов анализа устанавливают такими, чтобы расчетная дальность обнаружения цели при зондирующем сигнале первого этапа и пороге анализа с номером i была равна расчетной дальности обнаружения цели при зондирующем сигнале второго этапа с номером i и пороге обнаружения с тем же номером;
предварительно формируют n интервалов анализа по дальности с номерами k=1, …, n, при этом первый интервал анализа (k=1) находится в пределах от нуля до инструментальной дальности РЛС при зондирующем сигнале второго этапа обнаружения с наибольшей частотой повторения, второй интервал анализа (k=2) - от конца первого интервала анализа до инструментальной дальности РЛС при зондирующем сигнале второго этапа со следующей по убыванию частотой повторения и так далее - до n-го (k=n) интервала;
принимаемый отраженный сигнал первого этапа обнаружения дополнительно сравнивают с n порогами анализа в n интервалах анализа и подсчитывают количество превышений каждого (i-го) порога анализа в каждом (k-м) интервале анализа, то есть определяют величины Nik;
в качестве зондирующего сигнала второго этапа обнаружения выбирают зондирующий сигнал с номером, равным наименьшему номеру порога анализа i, для которого величина Nik в каждом интервале анализа k больше нуля и совпадает с количеством превышений этим сигналом порога с номером i=n;
в качестве порога второго этапа обнаружения выбирают порог обнаружения с номером, соответствующим номеру выбранного зондирующего сигнала.
Суть заявляемого технического решения заключается в следующем.
В заявляемом способе перед каждым излучением зондирующего сигнала второго этапа обнаружения проводят выбор зондирующего сигнала второго этапа из имеющегося предварительно введенного (до начала работы РЛС) набора зондирующих сигналов с различными частотами повторения.
Для осуществления указанного выбора также предварительно (до начала работы РЛС) вводят n порогов анализа с номерами (i), совпадающими с номерами зондирующих сигналов второго этапа обнаружения, и формируют n интервалов анализа по дальности с номерами k=1, …, n.
При выборе зондирующего сигнала второго этапа обнаружения используют отраженный сигнал первого этапа. Для получения количества и дальностей обнаруженных целей при этом зондирующем сигнале таких же, как и при введенных зондирующих сигналах второго этапа обнаружения, уровни порогов анализа устанавливают исходя из равенства соответствующих расчетных дальностей обнаружения цели.
В процессе выбора зондирующего сигнала второго этапа обнаружения принимаемый отраженный сигнал первого этапа обнаружения сравнивают с порогами анализа в интервалах анализа и подсчитывают количество превышений каждого (i-го) порога анализа в каждом (k-м) интервале анализа, то есть определяют величины Nik.
Номер зондирующего сигнала второго этапа обнаружения выбирают равным наименьшему номеру порога анализа i, количество превышений Nik которого принятым сигналом первого этапа обнаружения в каждом интервале анализа k больше нуля и совпадает с количеством превышений этим сигналом порога с номером i=n.
Выбранный таким образом зондирующий сигнал второго этапа обнаружения имеет наибольшую частоту повторения импульсов, при которой обнаруживаются все цели, обнаруживаемые зондирующим сигналом с наименьшей частотой повторения.
При выбранном таким образом зондирующем сигнале второго этапа обнаружения наиболее удаленная область в направлении зоны обзора, где целей на первом этапе не было обнаружено, на втором этапе обнаружения не осматривается. За счет этого время, затрачиваемое на осмотр зоны и обнаружение целей, сокращается, то есть достигается заявляемый технический результат.
Изобретение иллюстрируется следующими чертежами.
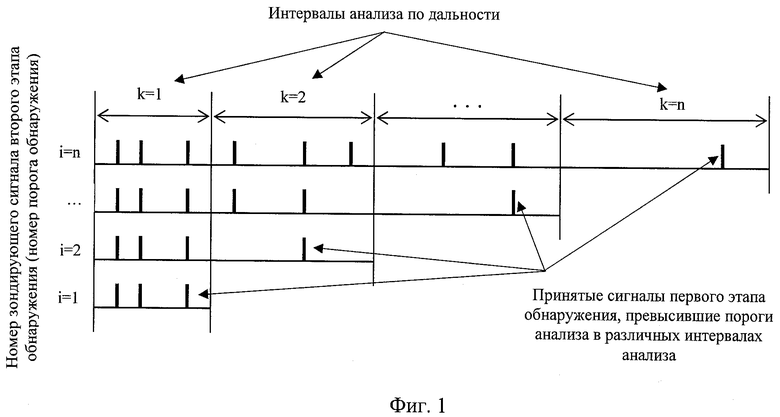
Фиг.1 - иллюстрация расположения принятых сигналов первого этапа обнаружения в интервалах анализа.
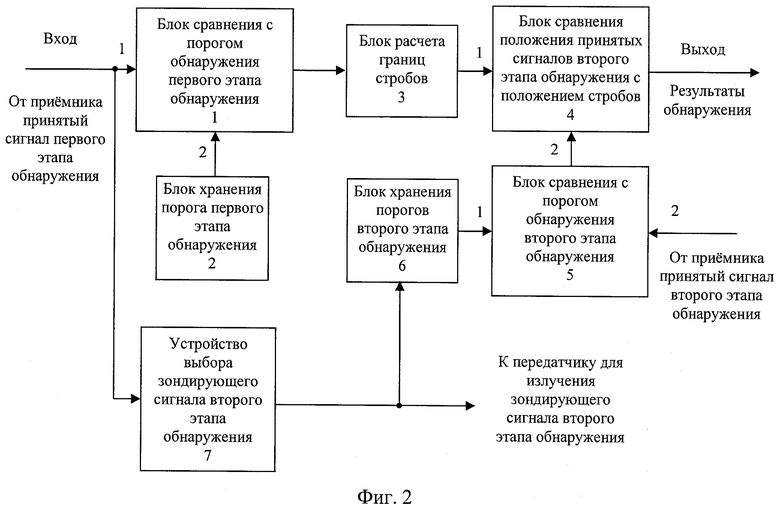
Фиг.2 - функциональная схема устройства обнаружения целей, реализующая заявляемый способ.
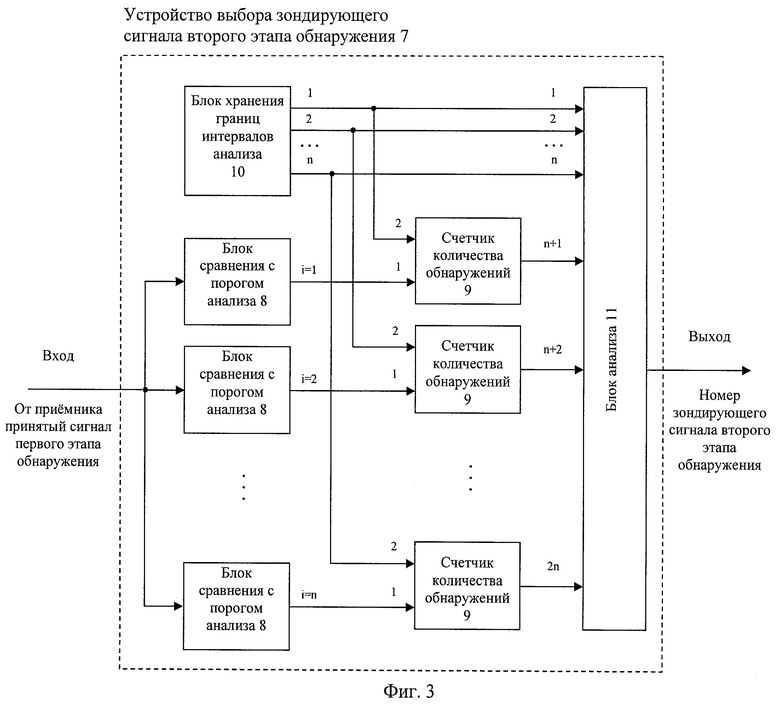
Фиг.3 - функциональная схема устройства выбора зондирующего сигнала второго этапа обнаружения.
Рассмотрим пример реализации заявляемого способа.
Пусть в РЛС для выбора на втором этапе обнаружения имеется четыре зондирующих сигнала с различными частотами повторения (n=4).
При этом
На первом этапе обнаружения применяется зондирующий сигнал под номером i=4 с наименьшей частотой повторения.
Функциональная схема устройства обнаружения целей, реализующая заявляемый способ, представлена на фиг.2. Устройство включает в себя блок сравнения с порогом обнаружения первого этапа обнаружения 1, блок хранения порога первого этапа обнаружения 2, блок расчета границ стробов 3, блок сравнения положения принятых сигналов второго этапа обнаружения с положением стробов 4, блок сравнения с порогом обнаружения второго этапа обнаружения 5, блок хранения порогов второго этапа обнаружения 6, устройство выбора зондирующего сигнала второго этапа обнаружения 7. При этом соединенные между собой первый вход блока сравнения с порогом обнаружения первого этапа обнаружения 1 и вход устройства выбора зондирующего сигнала второго этапа обнаружения 7 являются входом устройства обнаружения цели, выход блока хранения порога первого этапа обнаружения 2 соединен со вторым входом блока сравнения с порогом обнаружения первого этапа обнаружения 1, выход которого соединен со входом блока расчета границ стробов 3, выход которого соединен с первым входом блока сравнения положения принятых сигналов второго этапа обнаружения с положением стробов 4. Выход блока 4 является выходом устройства обнаружения цели. Выход устройства выбора зондирующего сигнала второго этапа обнаружения 7 соединен со входом блока хранения порогов второго этапа обнаружения 6, выход которого соединен с первым входом блока сравнения с порогом обнаружения второго этапа обнаружения 5, на второй вход которого подается принятый сигнал второго этапа обнаружения, а выход соединен со вторым входом блока сравнения положения принятых сигналов второго этапа обнаружения с положением стробов 4.
Устройство выбора зондирующего сигнала второго этапа обнаружения 7 (фиг.3) содержит четыре блока сравнения с порогом анализа 8, четыре счетчика количества обнаружений 9, блок хранения границ интервалов анализа 10, блок анализа 11. При этом входы блоков сравнения с порогом анализа 8 соединены между собой и являются входом устройства, каждый из выходов блоков сравнения с порогом анализа 8 соединен с первым входом соответствующего счетчика количества обнаружений 9, каждый из четырех выходов блока хранения границ интервалов анализа 10 соединен со вторым входом соответствующего счетчика количества обнаружений 9 и соответствующим входом блока анализа 11, выходы счетчиков количества обнаружений 9 соединены со следующими четырьмя входами устройства анализа 11, выход которого является выходом устройства.
Устройство обнаружения целей, реализующее заявляемый способ, может быть выполнено с использованием следующих функциональных элементов.
Блок сравнения с порогом обнаружения первого этапа обнаружения 1, блок хранения порога первого этапа обнаружения 2, блок сравнения принятых сигналов второго этапа обнаружения с положением стробов 4, блок сравнения с порогом обнаружения второго этапа обнаружения 5, блок хранения порогов второго этапа обнаружения 6, блок сравнения с порогом анализа 8, счетчик количества обнаружений 9, блок хранения границ интервалов анализа 10 выполнены с применением интегральных схем, описанных в источнике: Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина. - М.: «Радио и связь», 1984.
Блок расчета границ стробов 3 - вычислитель, реализующий операцию вычисления границ стробов для второго этапа обнаружения в соответствии с формулой (1).
Блок анализа 11 - вычислитель, реализующий операцию выбора номера зондирующего сигнала второго этапа, равного наименьшему номеру порога анализа i, количество превышений Nik которого принятым сигналом в каждом интервале анализа k больше нуля и совпадает с количеством превышений этим сигналом порога с номером i=l.
Обнаружение целей с помощью устройства обнаружения целей осуществляется следующим образом.
Предварительно, то есть до начала работы РЛС, вычисляются границы по дальности интервалов анализа, в которых по количеству превышения порогов анализа будет приниматься решение о выборе зондирующего сигнала для второго этапа обнаружения. При этом первый интервал анализа (k=1) находится в пределах от нуля до инструментальной дальности РЛС при зондирующем сигнале второго этапа обнаружения с наибольшей частотой повторения, второй интервал анализа (k=2) - от конца первого интервала анализа до инструментальной дальности РЛС при зондирующем сигнале второго этапа со следующей по убыванию частотой повторения и так далее - до n-го (k=n) интервала.
Для рассматриваемого примера интервалы анализа с номерами k=1, 2, 3, 4 имеют следующие границы (показаны также на фиг.1, n=4):
Значения границ интервалов анализа записываются в блок хранения границ интервалов анализа 10 (фиг.3) и постоянно хранятся там.
Также заранее определяются уровни порогов анализа и устанавливаются в блоках сравнения с порогом анализа 8.
Принятый отраженный сигнал первого этапа обнаружения (с выхода тракта приемника РЛС, соответствующего зондирующему сигналу) поступает на вход блока сравнения с порогом обнаружения первого этапа обнаружения 1 (фиг.2). При превышении в некоторой дискрете по дальности порога обнаружения первого этапа обнаружения, поступающего с выхода блока хранения порога первого этапа обнаружения 2, с выхода блока 1 выдается стандартный сигнал - признак обнаружения, который поступает на вход блока расчета границ стробов 3, где для каждого обнаруженного сигнала в соответствии с выражением (1) вычисляются границы строба обнаружения. Рассчитанные таким образом границы поступают на первый вход блока сравнения принятых сигналов второго этапа с положением стробов 4.
Принятый отраженный сигнал первого этапа обнаружения поступает также и на вход устройства выбора зондирующего сигнала второго этапа обнаружения 7.
Перед этим счетчики количества обнаружений 9 обнуляются.
Принимаемый отраженный сигнал первого этапа обнаружения подается одновременно на четыре блока сравнения с порогом анализа 8, уровни порогов в которых установлены таким образом, чтобы расчетные дальности обнаружения целей при каждом из них были равны расчетным дальностям обнаружения при использовании на втором этапе зондирующих сигналов с частотами повторения второго этапа обнаружения в соответствии с таблицей 1.
При каждом превышении принятым сигналом первого этапа i-го порога обнаружения на k-м интервале анализа содержимое соответствующего счетчика количества обнаружений 9 увеличивается на единицу, то есть определяются величины Nik.
По окончании приема сигнала первого этапа обнаружения границы интервалов анализа и соответствующие каждому сигналу (i) и интервалу (k) значения счетчиков количества обнаружений 9 (величины Nik) подаются в блок анализа 11, где определяется номер зондирующего сигнала второго этапа обнаружения. При этом номер зондирующего сигнала второго этапа обнаружения выбирают равным наименьшему номеру порога анализа i, количество превышений Nik которого принятым сигналом первого этапа обнаружения в каждом интервале анализа k больше нуля и совпадает с количеством превышений этим сигналом порога с номером i=n.
Возможные варианты значений величин Nik и соответствующие им зондирующие сигналы второго этапа обнаружения, выбор которых проводится в блоке анализа 11, для рассматриваемого примера следующие:
Номер зондирующего сигнала второго этапа обнаружения с выхода устройства выбора зондирующего сигнала второго этапа обнаружения 7 подается в передатчик РЛС, в котором (в соответствии с этим номером) формируется зондирующий сигнал второго этапа и затем излучается в пространство. Номер зондирующего сигнала второго этапа обнаружения с выхода устройства выбора зондирующего сигнала второго этапа обнаружения 7 подается также на вход блока хранения порогов второго этапа обнаружения 6, где выбирается уровень порога второго этапа обнаружения, соответствующий номеру зондирующего сигнала. Выбранный таким образом уровень порогового сигнала подается на первый вход блока сравнения с порогом обнаружения второго этапа обнаружения 5, на второй вход которого поступает принятый сигнал второго этапа обнаружения (с выхода тракта приемника РЛС, соответствующего зондирующему сигналу второго этапа). При превышении этим сигналом порога обнаружения дальность обнаруженного сигнала с выхода блока 5 подается на второй вход блока сравнения положений принятых сигналов второго этапа обнаружения с положением стробов 3. Если дальность сигнала, обнаруженного на втором этапе, находится в пределах границ строба, рассчитанных в блоке расчета границ стробов 3, то на выходе блока сравнения положений принятых сигналов второго этапа обнаружения с положением стробов 3 формируется сигнал - признак обнаружения цели, который выдается как результат обнаружения цели.
Таким образом, в устройстве обнаружения целей, реализующем заявляемый способ, на втором этапе обнаружения применяется зондирующий сигнал с частотой повторения, при которой наиболее удаленная область в направлении зоны обзора, где целей на первом этапе не было обнаружено, на втором этапе обнаружения не осматривается. За счет этого время, затрачиваемое на осмотр зоны обзора и обнаружение целей, сокращается, то есть достигается заявляемый технический результат.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОБНАРУЖЕНИЯ МАЛОЗАМЕТНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2013 |
|
RU2534217C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕЙСЯ ЦЕЛИ С РАЗЛИЧЕНИЕМ СКОРОСТНЫХ И МАНЕВРЕННЫХ ХАРАКТЕРИСТИК | 2015 |
|
RU2619056C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДАЛЬНОСТИ | 1985 |
|
RU2145092C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
| РАДИОЛОКАТОР С НЕПРЕРЫВНЫМ ШУМОВЫМ СИГНАЛОМ И СПОСОБ РАСШИРЕНИЯ ДИАПАЗОНА ИЗМЕРЯЕМЫХ ДАЛЬНОСТЕЙ В РАДИОЛОКАТОРЕ С НЕПРЕРЫВНЫМ СИГНАЛОМ | 2015 |
|
RU2589036C1 |
| СПОСОБ РАЗРЕШЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2012 |
|
RU2492502C9 |
| УСТРОЙСТВО СЕЛЕКЦИИ МАЛОВЫСОТНЫХ МАЛОСКОРОСТНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ И ДВИЖУЩИХСЯ НАЗЕМНЫХ ЦЕЛЕЙ В КОГЕРЕНТНОЙ БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2005 |
|
RU2298809C9 |
| КОДОВЫЙ ДАЛЬНОМЕР ДЛЯ ИМПУЛЬСНО-ДОПЛЕРОВСКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 1999 |
|
RU2149422C1 |
| СПОСОБ ОБНАРУЖЕНИЯ РАДИОЛОКАЦИОННЫХ ЦЕЛЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2494413C1 |
| Радиолокационная станция кругового обзора "Резонанс" | 2015 |
|
RU2624736C2 |
Изобретение относится к области радиолокации и может быть использовано в обзорных радиолокационных станциях с фазированной антенной решеткой при двухэтапном обнаружении воздушных целей. Достигаемым техническим результатом является уменьшение затрат времени на осмотр зоны и обнаружение целей. Указанный результат достигается за счет применения на втором этапе обнаружения зондирующего сигнала с частотой повторения, выбранной исходя из дальности наиболее удаленной цели, обнаруженной на первом этапе. При этом в качестве зондирующего сигнала второго этапа обнаружения выбирается зондирующий сигнал с наибольшей частотой повторения, при которой могут быть обнаружены все цели, обнаруженные на первом этапе обнаружения. 3 ил.
Способ радиолокационного обнаружения целей, включающий излучение в каждом направлении зоны обзора радиолокационной станции (РЛС) зондирующего сигнала первого этапа обнаружения, излучение зондирующего сигнала второго этапа обнаружения, если на первом этапе произошло обнаружение, с соответствующими частотами повторения, сравнение принятого на каждом этапе сигнала с порогами соответственно первого и второго этапов обнаружения, принятие решения об обнаружении цели, отличающийся тем, что излучаемый зондирующий сигнал второго этапа обнаружения выбирают исходя из дальности наиболее удаленной цели, обнаруженной на первом этапе обнаружения, следующим образом:
дополнительно к зондирующему сигналу второго этапа обнаружения предварительно вводят n-1 зондирующих сигналов второго этапа обнаружения с более высокими частотами повторения и n-1 соответствующих порогов обнаружения, где n - общее количество зондирующих сигналов второго этапа с номерами i=1, …, n, при этом уровни дополнительных n-1 порогов обнаружения выбирают исходя из максимальной вероятности обнаружения цели при допустимом числе ложных тревог и минимальных затратах времени (энергии) в направлении зоны обзора;
предварительно вводят n порогов анализа, при этом номер каждого из них (i) совпадает с номером зондирующего сигнала второго этапа обнаружения; уровни порогов анализа устанавливают такими, чтобы расчетная дальность обнаружения цели при зондирующем сигнале первого этапа и пороге анализа с номером i была равна расчетной дальности обнаружения цели при зондирующем сигнале второго этапа с номером i и пороге обнаружения с тем же номером;
предварительно формируют n интервалов анализа по дальности с номерами k=1, …, n, при этом первый интервал анализа (k=1) находится в пределах от нуля до инструментальной дальности РЛС при зондирующем сигнале второго этапа обнаружения с наибольшей частотой повторения, второй интервал анализа (k=2) - от конца первого интервала анализа до инструментальной дальности РЛС при зондирующем сигнале второго этапа со следующей по убыванию частотой повторения и так далее - до n-го (k=n) интервала;
принимаемый отраженный сигнал первого этапа обнаружения дополнительно сравнивают с n порогами анализа в n интервалах анализа и подсчитывают количество превышений каждого (i-го) порога анализа в каждом (k-м) интервале анализа, то есть определяют величины Nik;
в качестве зондирующего сигнала второго этапа обнаружения выбирают зондирующий сигнал с номером, равным наименьшему номеру порога анализа i, для которого величина Nik в каждом интервале анализа k больше нуля и совпадает с количеством превышений этим сигналом порога с номером i=n;
в качестве порога второго этапа обнаружения выбирают порог обнаружения с номером, соответствующим номеру выбранного зондирующего сигнала.
| Справочник по радиолокации | |||
| Основы радиолокации | |||
| / Под ред | |||
| М.СКОЛНИКА | |||
| - М.: Советское радио, 1976, т.1, с.200 | |||
| СПОСОБ ОБЪЕДИНЕННЫХ РАДИОЛОКАЦИОННОГО АВТОМАТИЧЕСКОГО ОБНАРУЖЕНИЯ И ТРАССОВОГО СОПРОВОЖДЕНИЯ, КРУГОВОГО ОБЗОРА ВОЗДУШНЫХ, НАЗЕМНЫХ, НАДВОДНЫХ ЦЕЛЕЙ, ЛОКАЛЬНОЙ РАДИОСВЯЗИ И БЛИЖНЕЙ РАДИОНАВИГАЦИИ ОБЪЕКТОВ И СУБЪЕКТОВ | 2005 |
|
RU2309429C2 |
| RU 2008117568 А, 10.11.2009 | |||
| СПОСОБ ОБНАРУЖЕНИЯ ГРУППОВОЙ ЦЕЛИ | 2005 |
|
RU2298806C9 |
| СПОСОБ СЕЛЕКЦИИ ЛОЖНЫХ ВОЗДУШНЫХ ЦЕЛЕЙ | 2005 |
|
RU2280263C1 |
| US 5315303 А, 24.05.1994 | |||
| WO 9724629 A1, 10.07.1997 | |||
| Устройство для многоточечной сигнализации | 1982 |
|
SU1049944A1 |
| Маятниковый датчик крена крутосклонного транспортного средства | 1979 |
|
SU870206A1 |

