Изобретение относится к области радиолокации, в частности к обзору зоны радиолокационной станции (РЛС) с фазированной антенной решеткой с двумерным электронным сканированием узким («карандашным») лучом.
В зоне обзора РЛС всегда существуют пассивные помехи. Они могут быть как естественного происхождения (сигналы, отраженные от протяженных метеообразований (облаков), точечных и распределенных отражателей на земной поверхности (местных предметов)), так и созданными умышленно (сигналы, отраженные от облаков дипольных отражателей, создаваемых противником для маскировки своих средств воздушного нападения). Пассивные помехи приводят к излишней загрузке системы обработки РЛС и таким образом снижают ее пропускную способность.
Известный способ включает обзор зоны РЛС с применением селекции движущихся целей (СДЦ), основанной на различии радиальных скоростей цели и источников пассивных помех, которые определяются с использованием эффекта Доплера. При селекции движущихся целей подавляются принятые сигналы, мало изменяющиеся от одного зондирования к другому (отраженные от неподвижных и медленно движущихся объектов), и выделяются сигналы, изменяющиеся более значительно (отраженные от движущихся целей) (Теоретические основы радиолокации. Под ред. В.Е.Дулевича. - М.: Сов. радио, 1978, с.464-484).
Недостатком известного способа обзора являются большие затраты времени (для исключения «слепых» скоростей в СДЦ) - от 3-х до 6 зондирований в направлении зоны обзора. В обзорных РЛС, для которых характерен дефицит временных ресурсов, это приводит к сокращению зоны обзора и снижению пропускной способности РЛС.
Другим существенным недостатком известного способа является значительное уменьшение потенциала РЛС в направлениях зоны, где используется СДЦ, что выражается в уменьшении дальности обнаружения цели.
В связи с указанными недостатками известного способа в обзорных РЛС СДЦ применяют, как правило, только в нижних направлениях зоны обзора и на дальности до 150-200 км. В результате большая часть зоны обзора РЛС оказывается не защищенной от пассивных помех.
Недостатком известного способа является также связанная с СДЦ сложность его реализации и, как следствие, высокая стоимость.
Наиболее близким к заявляемому способу является способ обзора зоны РЛС, оснащенной фазированной антенной решеткой с двумерным электронным сканированием узким лучом, с применением двухэтапного обнаружения цели (Справочник по радиолокации. Под ред. М.Сколника. Пер. с англ. Под ред. К.Н.Трофимова. Том 1. Основы радиолокации. Под ред. Я.С.Ицхоки. М.: Сов. радио, 1976, с.200).
В наиболее близком способе излучают в направлении зоны обзора зондирующий сигнал первого этапа обнаружения, принимают сигнал, отраженный от цели или от источника пассивных помех, и сравнивают его во всех дискретах по дальности с порогом первого этапа обнаружения, при превышении хотя бы в одной дискрете по дальности порога первого этапа обнаружения в этом направлении через интервал времени Δt излучают зондирующий сигнал второго этапа обнаружения, принимают отраженный сигнал, и в стробе по дальности, центр которого совпадает с дальностью обнаружения сигнала на первом этапе обнаружения, а размер определен, исходя из заданной максимальной радиальной скорости цели, принятый сигнал сравнивают с порогом второго этапа обнаружения, принимают решение об обнаружении сигнала от цели.
Наиболее близкий способ обеспечивает высокий потенциал при обнаружении, прост в реализации, но в нем не предусмотрена защита от пассивных помех.
Решаемой задачей (техническим результатом), таким образом, является обеспечение защиты от пассивных помех при двухэтапном обнаружении сигнала без уменьшения потенциала РЛС.
Указанный технический результат достигается тем, что в способе обзора зоны радиолокационной станции, оснащенной фазированной антенной решеткой с двумерным электронным сканированием узким лучом, в соответствии с которым излучают в направлении зоны обзора зондирующий сигнал первого этапа обнаружения, принимают сигнал, отраженный от цели или от источника пассивных помех, и сравнивают его во всех дискретах по дальности с порогом первого этапа обнаружения, при превышении хотя бы в одной дискрете по дальности порога первого этапа обнаружения в этом направлении через интервал времени Δt излучают зондирующий сигнал второго этапа обнаружения, принимают отраженный сигнал, и в стробе по дальности, центр которого совпадает с дальностью обнаружения сигнала на первом этапе обнаружения, а размер определен, исходя из заданной максимальной радиальной скорости цели, принятый сигнал сравнивают с порогом второго этапа обнаружения, принимают решение об обнаружении сигнала от цели, согласно изобретению зондирующий сигнал второго этапа обнаружения излучают через интервал времени Δt, определяемый из выражения

где σr - среднеквадратическая ошибка измерения радиальной дальности,
vr min - минимальная радиальная составляющая скорости цели, при которой цель считают неподвижной,
и на несущей частоте, которая отличается от несущей частоты зондирующего сигнала первого этапа обнаружения не менее чем на величину Δf, определяемую из выражения

где τи - длительность зондирующего импульса по уровню половинной мощности,
для сигнала, обнаруженного в стробе, вычисляют разность дальностей обнаружения на первом и втором этапах обнаружения и, если указанная разность превышает величину ΔR, определяемую из выражения

то принимают решение об обнаружении сигнала от цели, если указанная разность менее или равна величине ΔR, то принимают решение об обнаружении сигнала, отраженного от источника пассивных помех.
Суть заявляемого способа заключается в следующем.
В заявляемом способе защита от пассивных помех в виде сигналов, отраженных протяженными объектами (метеообразованиями и облаками дипольных отражателей), достигается за счет уменьшения корреляции сигналов, принимаемых на этапах обнаружения. Такое уменьшение корреляции обеспечивается временным и частотным разносом зондирующих сигналов на этапах обнаружения.
Временной разнос зондирующих сигналов на этапах обнаружения обеспечивается выбором интервала времени Δt между зондирующими сигналами на этапах обнаружения, определяемого из выражения (1), который может быть взят равным около 0.5-1.0 с (патент РФ №2297014).
Частотный разнос зондирующих сигналов на этапах обеспечивается применением сигналов, излучаемых на несущих частотах, отличающихся на величину Δf, определяемую из выражения (2).
При указанных временном и частотном разносах зондирующих сигналов на этапах обнаружения большая часть сигналов, отраженных протяженными помехами и обнаруженных на первом этапе, на втором этапе либо не обнаруживается, либо обнаруживается на радиальных дальностях, отличающихся на величину, превышающую возможное перемещение цели, движущейся с заданной максимальной радиальной скоростью, за интервал времени между этапами Δt. Поскольку размер строба выбран, исходя из указанных скорости и времени, то сигналы от таких помех не попадают в строб, и на втором этапе не обнаруживаются.
Экспериментальные данные показывают, что указанный временной и частотный разнос зондирующих сигналов на этапах обнаружения позволяет уменьшить количество сигналов, отраженных от протяженных помех, в 20-60 раз.
Защита от пассивных помех в виде сигналов, отраженных от земной поверхности (местных предметов), то есть от неподвижных помех, в заявляемом способе достигается путем измерения радиального перемещения обнаруженного объекта за время между этапами обнаружения Δt и сравнения этого измеренного перемещения с заданной величиной ΔR, определяемой из выражения (3). Если указанное радиальное перемещение превышает величину ΔR, то принимают решение об обнаружении сигнала от цели, если же оно менее или равно величине ΔR, принятой для неподвижного объекта, то принимают решение об обнаружении сигнала, отраженного от источника пассивных помех, и его исключают из дальнейшей обработки.
Суммарное количество сигналов, отраженных от пассивных помех, оставшихся в зоне обзора РЛС после применения заявляемого способа, ожидается на уровне 2-5% относительно их количества, обнаруженных на первом этапе. При этом потенциал РЛС не уменьшается.
Таким образом, в заявляемом способе обеспечивается защита от пассивных помех при двухэтапном обнаружении сигнала без уменьшения потенциала РЛС, то есть достигается заявляемый технический результат.
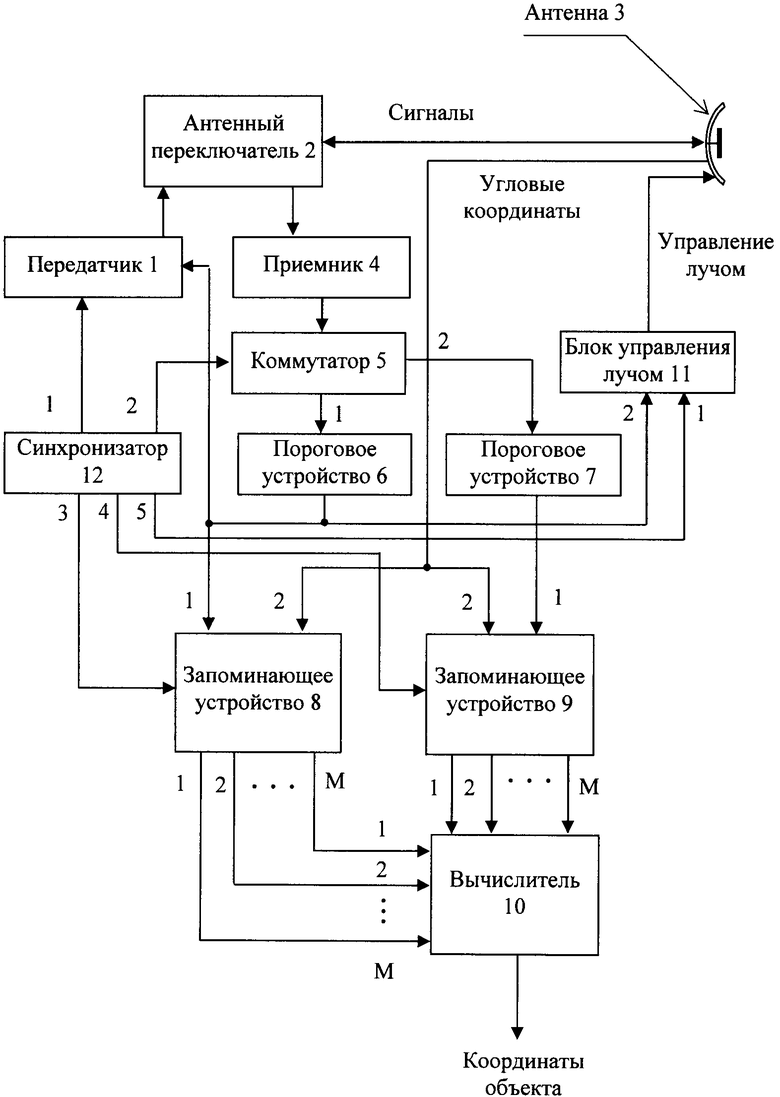
Изобретение иллюстрируется чертежом, на котором изображена блок-схема РЛС, реализующей заявляемый способ.
РЛС, реализующая заявляемый способ, содержит передатчик 1, антенный переключатель 2, антенну 3, приемник 4, коммутатор 5, пороговое устройство 6, пороговое устройство 7, запоминающее устройство 8, запоминающее устройство 9, вычислитель 10, блок управления лучом 11, синхронизатор 12, при этом выход передатчика 1 соединен со входом антенного переключателя 2, вход/выход которого соединен с антенной 3, выход антенного переключателя 2 соединен со входом приемника 4, выход которого соединен со входом коммутатора 5, первый выход которого соединен со входом порогового устройства 6, второй - со входом порогового устройства 7, выходы порогового устройства 6 и координатный выход антенны 3 соединены соответственно с первым и вторым входами запоминающего устройства 8, выход порогового устройства 7 и координатный выход антенны 3 соединены соответственно с первым и вторым входами запоминающего устройства 9, выход порогового устройства 6 соединен также с управляющим входом передатчика 1 и вторым входом блока управления лучом 11, выход которого соединен с управляющим входом антенны 3, М выходов запоминающего устройства 8 и М выходов запоминающего устройства 9 соединены соответственно с первой и второй группами из М входов каждая вычислителя 10, первый, второй, третий, четвертый и пятый выходы синхронизатора 12 соединены соответственно с синхровходами передатчика 1, коммутатора 5, запоминающего устройства 8, запоминающего устройства 9 и первым входом блока управления лучом 11, выход вычислителя 10 является выходом РЛС.
Количество выходов запоминающих устройств 8 и 9 и соответственно первой и второй групп входов вычислителя 10, т.е. величина М, определяется наибольшим количеством дискрет по дальности в направлениях зоны обзора.
РЛС может быть выполнена на следующих функциональных элементах.
Передатчик 1 - многокаскадный импульсный передатчик на клистроне (A.M.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. Военное издательство, 1967, с.278-279, рис.7.2).
Антенный переключатель 2 - балансный антенный переключатель на базе циркуля-тора (A.M.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. Военное издательство, 1967, с.166-168).
Антенна 3 - ФАР с двумерным электронным сканированием по углу места и азимуту (Справочник по радиолокации. Под ред. М.Сколника, т.2. - М.: Сов. радио, 1977, с.138).
Приемник 4 - супергетеродинный приемник (A.M.Педак и др. Справочник по основам радиолокационной техники. Под редакцией В.В.Дружинина. Военное издательство, 1967, с.343-344, рис.8.1).
Коммутатор 5, запоминающие устройства 8 и 9, вычислитель 10 - на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина. - М.: Радио и связь, 1984).
Блок управления лучом 11 - цифровой вычислитель, реализующий известный алгоритм расчета распределения состояний фазовращателей в полотне ФАР и формирования луча в заданном направлении по углу места (Справочник по радиолокации. Под ред. М.Сколника, т.2. - М.: Сов. радио, 1977, с.141-143).
Синхронизатор 12 выполнен на основе задающего генератора и последовательно соединенной с ним цепочки делителей частоты (Радиолокационные устройства (теория и принципы построения). Под ред. В.В.Григорина-Рябова. - М.: Сов. радио, 1970, с.602-603).
РЛС работает следующим образом. В передатчике 1 по командам синхронизатора 12 (с первого выхода) формируется зондирующий сигнал первого этапа обнаружения, который посредством антенного переключателя 2 подается в антенну 3, с помощью которой излучается в очередное направление зоны обзора. Перемещение луча антенны при обзоре зоны осуществляется по командам синхронизатора 12, поступающим с его пятого выхода на первый вход блока управления лучом 11. С выхода блока управления лучом 11 параметры состояний фазовращателей ФАР, определяющие положение луча антенны, подаются на управляющий вход антенны 3. Отраженные сигналы принимаются антенной 3 и поступают в приемник 4.
С выхода приемника 4 сигналы поступают на вход коммутатора 5, который при отсутствии сигнала на управляющем входе (в исходном состоянии) соединяет выход приемника 4 со входом порогового устройства 6, а при наличии сигнала на управляющем входе - со входом порогового устройства 7.
Если сигнал с выхода приемника 4 превысил уровень порога порогового устройства 6, что означает обнаружение сигнала на первом этапе обнаружения, то он в качестве управляющего сигнала подается на управляющий вход передатчика 1 и на второй вход блока управления лучом 11. При наличии этого сигнала в блоке управления лучом 11 формируется сигнал о запрете перемещения луча антенны 3 в следующее направление зоны обзора (на время, равное длительности второго этапа обнаружения), а передатчиком 1 через интервал времени (1) после излучения зондирующего сигнала первого этапа обнаружения излучается зондирующий сигнал второго этапа обнаружения на несущей частоте (2). Со второго выхода синхронизатора выдается сигнал на управляющий вход коммутатора 5, по которому выход приемника 4 соединяется со входом порогового устройства 7.
Излучается зондирующий сигнал второго этапа обнаружения. По окончании приема отраженных сигналов из направления коммутатор 5 устанавливается в исходное состояние, снимается также запрет перемещения луча антенны 3 в следующее направление зоны обзора.
Если сигнал с выхода приемника 4 на первом этапе обнаружения не превысил уровень порога порогового устройства 6, что означает отсутствие сигнала на первом этапе обнаружения, то на управляющий вход коммутатора 5 сигнал не подается, и он остается в исходном состоянии, не устанавливается запрет перемещения луча антенны 3 в следующее направление зоны обзора, не поступает управляющий сигнал на управляющий вход передатчика 1, и зондирующий сигнал второго этапа обнаружения не излучается. По команде синхронизатора 12, поступающей с его пятого выхода на первый вход блока управления лучом 11, осуществляется переход к следующему направлению зоны обзора, и по команде синхронизатора 12, поступающий с его первого выхода на вход передатчика 1, излучается зондирующий сигнал первого этапа обнаружения.
Сигналы первого и второго этапов обнаружения с выходов пороговых устройств 6 и 7 вместе с соответствующими угловыми координатами луча (с координатного выхода антенны 3) поступают на входы запоминающих устройств 8 и 9 соответственно, где в ходе обзора направления зоны последовательно запоминаются.
По окончании обзора каждого направления зоны по командам синхронизатора 12 (с третьего и четвертого выходов) из запоминающих устройств 8 и 9 извлекаются записанные в них данные и подаются в вычислитель 10, где вычисляется разность дальностей обнаружения на первом и в втором этапах обнаружения (дальность обнаружения на втором этапе обнаружения берется в стробе по дальности, центр которого совпадает с дальностью обнаружения сигнала на первом этапе обнаружения, а размер определен, исходя из заданной максимальной радиальной скорости цели) и сравнивается с величиной (3). По результатам сравнения принимается решение об обнаружении сигнала, отраженного от цели или от источника пассивных помех.
Таким образом достигается заявляемый технический результат.
Изобретение относится к области радиолокации, в частности к обзору зоны радиолокационной станции с фазированной антенной решеткой с двумерным электронным сканированием узким («карандашным») лучом. Достигаемым техническим результатом изобретения является обеспечение защиты от пассивных помех при двухэтапном обнаружении сигнала без уменьшения потенциала РЛС. В заявляемом способе защита от пассивных помех достигается уменьшением корреляции сигналов, принимаемых на этапах обнаружения, за счет временного и частотного разноса зондирующих сигналов, а также принятием решения по результатам анализа радиального перемещения обнаруженного объекта за время между этапами обнаружения. 1 ил.
Способ обзора зоны радиолокационной станции, оснащенной фазированной антенной решеткой с двумерным электронным сканированием узким лучом, согласно которому излучают в направлении зоны обзора зондирующий сигнал первого этапа обнаружения, принимают сигнал, отраженный от цели или от источника пассивных помех, и сравнивают его во всех дискретах по дальности с порогом первого этапа обнаружения, при превышении хотя бы в одной дискрете по дальности порога первого этапа обнаружения в этом направлении через интервал времени Δt излучают зондирующий сигнал второго этапа обнаружения, принимают отраженный сигнал, и в стробе по дальности, центр которого совпадает с дальностью обнаружения сигнала на первом этапе обнаружения, а размер определен, исходя из заданной максимальной радиальной скорости цели, принятый сигнал сравнивают с порогом второго этапа обнаружения, принимают решение об обнаружении сигнала от цели, отличающийся тем, что зондирующий сигнал второго этапа обнаружения излучают через интервал времени Δt, определяемый из выражения
Δt≥σr/vr min,
где σr - среднеквадратическая ошибка измерения радиальной дальности;
vr min - минимальная радиальная составляющая скорости цели, при которой цель считают неподвижной,
и на несущей частоте, которая отличается от несущей частоты зондирующего сигнала первого этапа обнаружения не менее чем на величину Δf, определяемую из выражения
|Δf|≥1/τи,
где τи - длительность зондирующего импульса по уровню половинной мощности,
для сигнала, обнаруженного в стробе, вычисляют разность дальностей обнаружения на первом и втором этапах обнаружения и, если указанная разность превышает величину ΔR, определяемую из выражения
ΔR=vrmin·Δt+σr,
то принимают решение об обнаружении сигнала от цели, если указанная разность менее или равна величине ΔR, то принимают решение об обнаружении сигнала, отраженного от источника пассивных помех.
| Основы радиолокации | |||
| /Под ред | |||
| ИЦХОКИ Я.С | |||
| - М.: Советское радио, 1976, с.200 | |||
| СПОСОБ НАБЛЮДЕНИЯ ЗА ПОВЕРХНОСТЬЮ И ВОЗДУШНОЙ ОБСТАНОВКОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ | 2003 |
|
RU2256193C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2001 |
|
RU2233456C2 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА ДЛЯ ПОСТРОЕНИЯ МНОГОФУНКЦИОНАЛЬНОГО РАДИОЛОКАТОРА | 2004 |
|
RU2274875C2 |
| US 5359329 A, 25.10.1994 | |||
| WO 2008067466 A1, 05.06.2008 | |||
| БЛОК БЕЗОПАСНОСТИ ПАНЕЛИ ИНДИКАЦИИ | 2010 |
|
RU2441285C1 |
| KR 20080025677 A, 21.03.2008. | |||

