Изобретение относится к системам автоматического управления и может быть использовано в системах регулирования объектами, параметры которых - неизвестные постоянные или медленно меняющиеся во времени величины. Такими системами являются, например, системы автоматического управления летательными аппаратами, ядерными реакторами, гидромелиоративными сооружениями и т.д.
Наиболее близким техническим решением к предлагаемому является система управления, содержащая объект управления, блок задания коэффициентов, первый и второй блоки суммирования, последовательно соединенные первый умножитель, второй умножитель, также последовательно соединенные блок нахождения модуля, блок нелинейного степенного преобразования и третий умножитель. Выходы объекта управления соединены с соответствующими входами блока задания коэффициентов, сигналы с выходов блока задания коэффициентов поступают на соответствующие входы первого блока суммирования, выход первого блока суммирования соединен с двумя входами первого умножителя, входом блока нахождения модуля, вторым входом второго умножителя, вторым входом третьего умножителя и вторым входом второго блока суммирования, выход первого умножителя соединен с первым входом второго умножителя, выход второго умножителя подключен к первому входу второго блока суммирования, выход блока нахождения модуля подключен к входу блока нелинейного степенного преобразования, выход которого соединен с первым входом третьего умножителя, выход третьего умножителя подключен к третьему входу второго блока суммирования, выход которого соединен с входом объекта управления. [Патент РФ № 2222040, МПК 7 G05В 13/02, 2002, Бюл. № 2, 2004].
Недостатком этой системы является неработоспособность для объектов с разницей порядков знаменателя и числителя передаточной функции, большей единицы.
Задачей изобретения является расширение функциональных возможностей системы управления.
Поставленная задача достигается тем, что в систему, содержащую объект управления, блок задания коэффициентов, первый и второй блоки суммирования, последовательно соединенные первый умножитель, второй умножитель, также последовательно соединенные блок нахождения модуля, блок нелинейного степенного преобразования и третий умножитель, выходы объекта управления соединены с соответствующими входами блока задания коэффициентов, сигналы с выходов блока задания коэффициентов поступают на соответствующие входы первого блока суммирования, дополнительно вводится последовательный фильтр-компенсатор, причем вход последовательного фильтра-компенсатора соединен с выходом первого блока суммирования, выход последовательного фильтра-компенсатора соединен с двумя входами первого умножителя, входом блока нахождения модуля, вторым входом второго умножителя, вторым входом третьего умножителя и вторым входом второго блока суммирования, выход первого умножителя соединен с первым входом второго умножителя, выход второго умножителя подключен к первому входу второго блока суммирования, выход блока нахождения модуля подключен к входу блока нелинейного степенного преобразования, выход которого соединен с первым входом третьего умножителя, выход третьего умножителя подключен к третьему входу второго блока суммирования, выход которого соединен с входом объекта управления.
Вводя в систему фильтр-компенсатор, получают систему, работоспособную при разнице порядков знаменателя и числителя передаточной функции объекта, превышающей единицу.
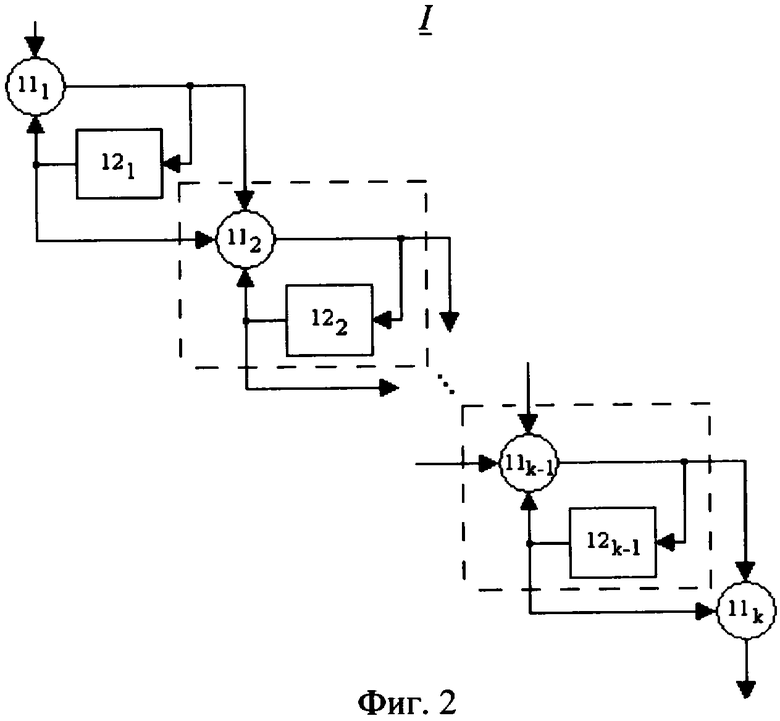
На фиг.1 представлена блок-схема робастной системы; на фиг.2 - функциональная схема последовательного фильтра-компенсатора.
Робастная система содержит объект управления 1, блок задания коэффициентов 2, первый блок суммирования 3, последовательный фильтр-компенсатор 4, первый умножитель 5, второй умножитель 6, второй блок суммирования 7, блок нахождения модуля 8, блок нелинейного степенного преобразования 9, третий умножитель 10.
y1,..., ym - выходы объекта управления, U - скалярное управляющее воздействие, удовлетворяющее уравнению:

где γ1>0, γ2>0, γ3>0, 0≤q≤ - постоянные,
gT - числовой вектор,
y - m-мерный вектор выходных координат объекта.
Робастная система функционирует следующим образом.
Сигналы с выходов объекта управления 1 одновременно поступают на соответствующие входы блока задания коэффициентов 2, который представляет собой блок умножителей. В блоке задания коэффициентов 2 происходит умножение сигнала с i-го выхода объекта управления на постоянный коэффициент. Сигналы с блока задания коэффициентов 2 поступают на соответствующие входы первого блока суммирования 3, где складываются. Сигнал с выхода первого блока суммирования 3 поступает на вход фильтра-компенсатора 4, функциональная схема которого представлена на фиг.2. В блоке суммирования 111 происходит сложение сигналов, полученных с первого блока суммирования 3 и выхода интегратора 121, сигнал с выхода блока суммирования 111 поступает на вход интегратора 121. В каждом блоке суммирования 11j (j=2, 3,..., k-1, где k - разность порядков знаменателя и числителя передаточной функции объекта управления) происходит сложение сигналов, полученных с выхода блока суммирования 11j-1, выхода интегратора 12j-1 и выхода интегратора 12j. На вход интегратора 12j поступает сигнал с выхода блока суммирования 11j. В блоке суммирования 11k происходит сложение сигналов, полученных с выхода блока суммирования 11k-1 и выхода интегратора 12k-1. С выхода блока суммирования 11k (соответствующего выходу последовательного фильтра-компенсатора 4) сигнал поступает на оба входа первого умножителя 5 и на второй вход второго умножителя 6, на первый вход которого поступает сигнал с выхода первого умножителя 5. На вход блока нахождения модуля 8 поступает сигнал с выхода последовательного фильтра-компенсатора 4, сигнал с выхода блока нахождения модуля 8 поступает на вход блока нелинейного степенного преобразования 9. В третьем умножителе 10 происходит умножение сигналов, полученных с выхода последовательного фильтра-компенсатора 4 и выхода блока нелинейного степенного преобразования 9. Во втором блоке суммирования 7 происходит сложение сигналов, полученных с выхода второго умножителя 6, выхода последовательного фильтра-компенсатора 4 и выхода третьего умножителя 10 с нужными коэффициентами. Сигнал с выхода второго блока суммирования 7 поступает на вход объекта управления 1.
Техническим результатом является расширение функциональных возможностей системы управления за счет введения последовательного фильтра-компенсатора, который повышает порядок числителя передаточной функции объекта управления.
Данное устройство может быть реализовано промышленным способом на основе стандартной элементной базы.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2008 |
|
RU2379735C2 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2178198C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2222040C1 |
| КОМБИНИРОВАННАЯ АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ С ПЕРИОДИЧЕСКИМИ КОЭФФИЦИЕНТАМИ | 2010 |
|
RU2441266C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ С ПЕРИОДИЧЕСКИМИ КОЭФФИЦИЕНТАМИ | 2010 |
|
RU2427870C1 |
| КОМБИНИРОВАННАЯ РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ НЕСТАЦИОНАРНЫХ ДИНАМИЧЕСКИХ ОБЪЕКТОВ | 2012 |
|
RU2475798C1 |
| Адаптивная система управления с фильтр-корректором для априорно неопределенных динамических объектов с периодическими коэффициентами | 2015 |
|
RU2620726C1 |
| Комбинированная адаптивная система управления с фильтр-корректором для априорно неопределенных динамических объектов с периодическими коэффициентами | 2015 |
|
RU2622674C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2006 |
|
RU2317578C1 |
| Адаптивная система управления с фильтр-корректором для динамических объектов с периодическими коэффициентами | 2015 |
|
RU2624489C2 |
Изобретение относится к системам автоматического управления и может быть использовано в системах регулирования объектами, параметры которых - неизвестные постоянные или медленно меняющиеся во времени величины. Техническим результатом является расширение функциональных возможностей системы управления. Технический результат достигается за счет того, что в систему, содержащую объект управления, блок задания коэффициентов, первый и второй блоки суммирования, последовательно соединенные первый умножитель, второй умножитель, также последовательно соединенные блок нахождения модуля, блок нелинейного степенного преобразования и третий умножитель, выходы объекта управления соединены с соответствующими входами блока задания коэффициентов, сигналы с выходов блока задания коэффициентов поступают на соответствующие входы первого блока суммирования, дополнительно вводится последовательный фильтр-компенсатор, причем вход последовательного фильтра-компенсатора соединен с выходом первого блока суммирования, выход последовательного фильтра-компенсатора соединен с двумя входами первого умножителя, входом блока нахождения модуля, вторым входом второго умножителя, вторым входом третьего умножителя и вторым входом второго блока суммирования, выход первого умножителя соединен с первым входом второго умножителя, выход второго умножителя подключен к первому входу второго блока суммирования, выход блока нахождения модуля подключен к входу блока нелинейного степенного преобразования, выход которого соединен с первым входом третьего умножителя, выход третьего умножителя подключен к третьему входу второго блока суммирования, выход которого соединен с входом объекта управления. 2 ил.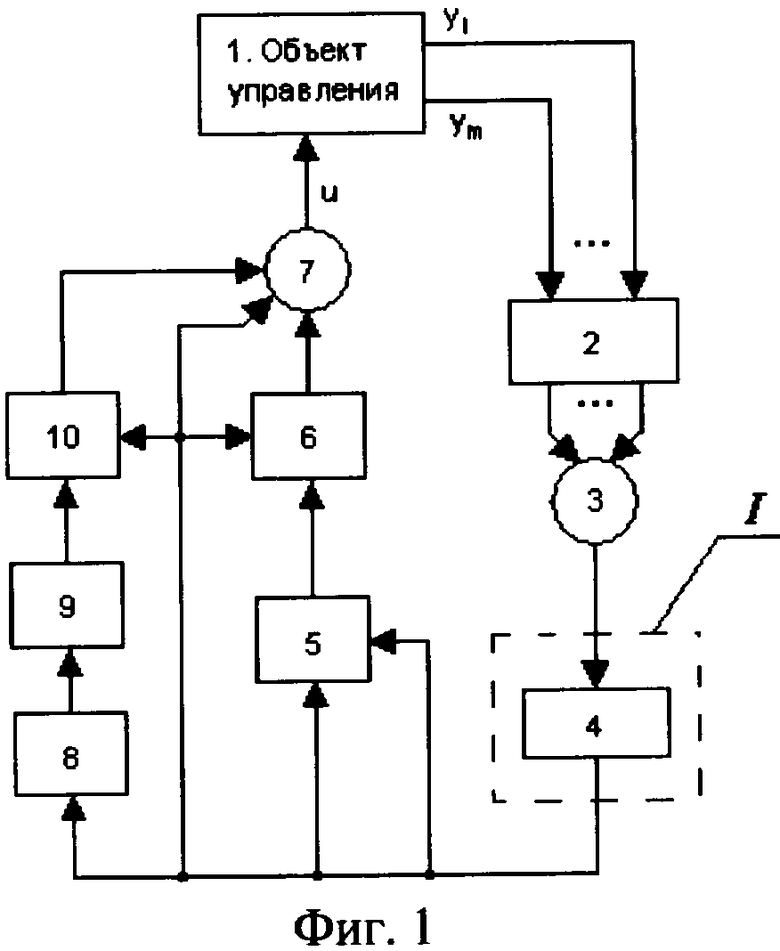
Робастная система управления, содержащая объект управления, блок задания коэффициентов, первый и второй блоки суммирования, последовательно соединенные первый умножитель, второй умножитель, также последовательно соединенные блок нахождения модуля, блок нелинейного степенного преобразования и третий умножитель, выходы объекта управления соединены с соответствующими входами блока задания коэффициентов, сигналы с выходов блока задания коэффициентов поступают на соответствующие входы первого блока суммирования, отличающаяся тем, что дополнительно введен последовательный фильтр-компенсатор, причем вход последовательного фильтра-компенсатора соединен с выходом первого блока суммирования, выход последовательного фильтра-компенсатора соединен с двумя входами первого умножителя, входом блока нахождения модуля, вторым входом второго умножителя, вторым входом третьего умножителя и вторым входом второго блока суммирования, выход первого умножителя соединен с первым входом второго умножителя, выход второго умножителя подключен к первому входу второго блока суммирования, выход блока нахождения модуля подключен к входу блока нелинейного степенного преобразования, выход которого соединен с первым входом третьего умножителя, выход третьего умножителя подключен к третьему входу второго блока суммирования, выход которого соединен с входом объекта управления, а последовательный фильтр-компенсатор состоит из последовательно соединенных типовых блоков, каждый из которых включает последовательно соединенные блок суммирования и интегратор, причем первый вход первого блока суммирования последовательного фильтра-компенсатора является входом последовательного фильтра-компенсатора, на второй вход первого блока суммирования последовательного фильтра-компенсатора поступает сигнал с выхода первого интегратора, на входы каждого последующего блока суммирования последовательного фильтра-компенсатора поступают сигналы с выходов предыдущего блока суммирования последовательного фильтра-компенсатора, предыдущего интегратора и последующего интегратора, выходом последовательного фильтра-компенсатора является сумма выходов последнего блока суммирования последовательного фильтра-компенсатора и последнего интегратора.
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2231818C2 |
| НЕЛИНЕЙНАЯ РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ НЕСТАЦИОНАРНЫХ ОБЪЕКТОВ | 2003 |
|
RU2251722C1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЭЛЕКТРИЧЕСКОГО ТОКА В ЭЛЕКТРОЛИТИЧЕСКОЙ ЯЧЕЙКЕ | 0 |
|
SU180669A1 |
| JP 60205710, 17.10.1985 | |||
| US 4975827 A, 04.12.1990. | |||

