Изобретение относится к системам автоматического управления и может быть использовано в системах регулирования объектами, параметры которых - неизвестные постоянные или медленно меняющиеся во времени величины. Такими системами являются, например, системы автоматического управления летательными аппаратами, ядерными реакторами, гидромелиоративными сооружениями и т.д.
Наиболее близким техническим решением к предлагаемому является самонастраивающаяся система управления, содержащая объект управления, блок задания коэффициентов, первый блок суммирования, дискриминатор знака, последовательно соединенные первый умножитель, второй умножитель и второй блок суммирования. Выходы объекта управления соединены с соответствующими входами блока задания коэффициентов, сигналы с выходов блока задания коэффициентов поступают на соответствующие входы первого блока суммирования, выход первого блока суммирования соединен с входом блока дискриминатора знака и с двумя входами первого умножителя, выход первого умножителя соединен с первым входом второго умножителя, на второй вход второго умножителя поступает сигнал с выхода дискриминатора знака, во втором блоке суммирования происходит сложение сигналов, полученных с выхода второго умножителя и выхода дискриминатора знака, выход второго блока суммирования подключен к объекту управления [1].
Недостатком этой системы является сложность конструкции, так как при построении алгоритмов системы используется дискриминатор знака.
Целью изобретения является упрощение алгоритмической структуры системы управления, за счет изменения алгоритма робастного управления.
Поставленная цель достигается тем, что из системы, содержащей объект управления, блок задания коэффициентов, первый и второй блоки суммирования, дискриминатор знака, последовательно соединенные первый и второй умножители” к первому и второму входам первого умножителя подключен выход первого блока суммирования, соответствующие входы которого соединены с соответствующими выходами блока задания коэффициентов, а выходы объекта управления соединены с соответствующими входами блока задания коэффициентов, выведен дискриминатор знака, причем первый вход второго умножителя соединен с выходом первого умножителя, второй вход второго умножителя соединен с выходом первого блока суммирования, выход второго умножителя подключен к первому входу второго блока суммирования, второй вход которого соединен с выходом первого блока суммирования, выход второго блока суммирования подключен к объекту управления.
Выводя из системы дискриминатор знака, получают систему с робастным управлением более простой структуры без изменения условия нормального функционирования системы при нестационарных характеристиках уравнения.
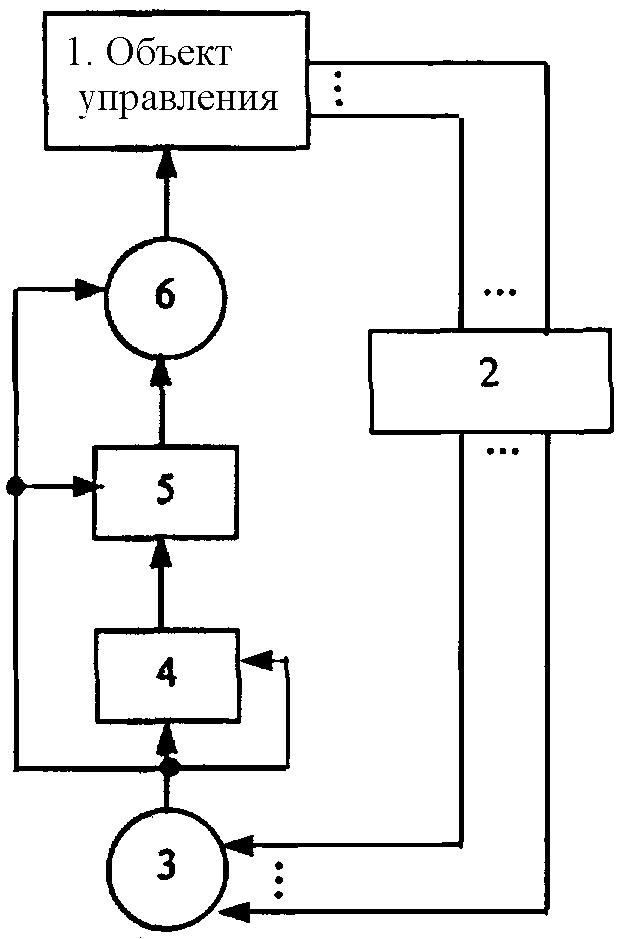
На чертеже представлена блок-схема системы.
Система содержит объект управления 1, блок 2 задания коэффициентов, первый блок суммирования 3, первый умножитель 4, второй умножитель 5 и второй блок суммирования 6.
у1, ..., уm - выходы объекта регулирования, U - скалярное управляющее воздействие, удовлетворяющее уравнению:
U=-γ1gTу-γ2(gTу)3,
где γ1>0, γ2>0 - постоянные;
gT - числовой вектор;
у - m-мерный вектор выходных координат объекта.
Система функционирует следующим образом.
Сигналы у1, ..., ym с выходов объекта управления 1 одновременно поступают на соответствующие входы блока 2 задания коэффициентов, который представляет собой блок умножителей. В блоке 2 задания коэффициентов происходит умножение сигнала с i-го выхода объекта управления на постоянный коэффициент gi. Сигналы с выходов блока 2 задания коэффициентов поступают на соответствующие входы блока суммирования 3, где складываются. Сигналы gTу с выхода блока суммирования 3 поступают на оба входа первого умножителя 4 и на второй вход второго умножителя 5. В первом умножителе 4 происходит умножение сигнала с выхода блока 3 первого суммирования на этот же сигнал. Сигнал (gTу) с выхода первого умножителя поступает на первый вход второго умножителя 5, где происходит его умножение на сигнал gTy, поступающий на второй вход второго умножителя 5. Полученный сигнал (gTу)3 поступает с выхода второго умножителя 5 на первый вход второго блока суммирования 6, на второй вход которого поступает сигнал (gTу) с выхода первого блока суммирования 3. Во втором блоке суммирования 6 происходит сложение сигналов, полученных с выхода второго умножителя 5 и выхода первого блока суммирования 3 с нужными коэффициентами. Сигнал U=-γ1gTу-γ2(gTу)3 с выхода второго блока суммирования 6 (управляющее воздействие) поступает на вход объекта управления 1.
Данное устройство может быть реализовано промышленным способом на основе стандартной элементной базы.
Источники информации
1. Патент РФ №2156993, кл. G 05 B 13/02, 2000 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2222040C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2178198C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2002 |
|
RU2220434C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2008 |
|
RU2379735C2 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1999 |
|
RU2156993C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2000 |
|
RU2170452C1 |
| РОБАСТНАЯ СИСТЕМА ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2001 |
|
RU2204858C1 |
| НЕЛИНЕЙНАЯ РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ НЕСТАЦИОНАРНЫХ ОБЪЕКТОВ | 2003 |
|
RU2251722C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2006 |
|
RU2317578C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2006 |
|
RU2317579C1 |
Изобретение относится к системам автоматического управления и может быть использовано в системах регулирования объектами, параметры которых - неизвестные постоянные или медленно меняющиеся во времени величины. Техническим результатом является упрощение алгоритмической структуры системы управления за счет изменения алгоритма робастного управления. Устройство содержит объект управления, блок задания коэффициентов, блоки суммирования, умножители. 1 ил.
Робастная система управления, содержащая объект управления, выходы объекта управления соединены с соответствующими входами блока задания коэффициентов, выходы которого соединены с соответствующими входами первого блока суммирования, выход первого блока суммирования подключен к первому и второму входам первого умножителя, выход первого умножителя соединен с первым входом второго умножителя, выход второго умножителя подключен к первому входу второго блока суммирования, выход которого соединен с входом объекта управления, отличающаяся тем, что выход первого блока суммирования подключен ко второму входу второго умножителя и второму входу второго блока суммирования.
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1999 |
|
RU2156993C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2000 |
|
RU2170452C1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1105860A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1019400A1 |
| СПОСОБ ИЗМЕРЕНИЯ ПЛОТНОСТИ ЭЛЕКТРИЧЕСКОГО ТОКА В ЭЛЕКТРОЛИТИЧЕСКОЙ ЯЧЕЙКЕ | 0 |
|
SU180669A1 |

