Изобретение относится к системам автоматического управления и может быть использовано в системах регулирования объектами с запаздыванием по состоянию, причем параметры объекта - неизвестные постоянные или меняющиеся во времени величины с неполным измерением пространства состояния объекта управления. Такими системами являются, например, системы автоматического управления летательными аппаратами, ядерными реакторами, гидромелиоративными сооружениями и т.д.
Наиболее близким техническим решением к предлагаемому является робастная система управления /1, Патент RU №2222040, кл. G05В 13/02, 2002/, содержащая объект регулирования, блок задания коэффициентов, первый и второй блок суммирования, последовательно соединенные первый умножитель и второй умножитель, также последовательно соединенные блок нахождения модуля, блок нелинейного степенного преобразования и третий умножитель. Выходы объекта управления соединены с соответствующими входами блока задания коэффициентов, сигналы с выходов блока задания коэффициентов поступают на соответствующие входы первого блока суммирования, выход первого блока суммирования подключен к первому и второму входам первого умножителя, к одному из входов второго умножителя, второго блока суммирования, блока нелинейного степенного преобразования. А также выход первого блока суммирования подается на вход блока нахождения модуля, последовательно соединенного с блоком нелинейного степенного преобразования и блоком третьего умножителя. Выход с блока третьего умножителя подается на один из входов второго блока суммирования, сигнал с которого подключен к входу объекта регулирования.
Недостатком этой системы является неспособность функционировать для объектов с разницей порядков знаменателя и числителя передаточной функции более чем на единицу.
Задачей изобретения является расширение функциональных возможностей системы управления.
Поставленная задача достигается тем, что в робастную систему, содержащую объект регулирования, блок задания коэффициентов, первый и второй блок суммирования, последовательно соединенные первый умножитель и второй умножитель, последовательно соединенные блок нахождения модуля, блок нелинейного степенного преобразования, третий умножитель, вводится блок динамического корректора. Выходы объекта управления соединены с соответствующими входами блока задания коэффициентов, сигналы с выходов блока задания коэффициентов поступают на соответствующие входы первого блока суммирования, выход первого блока суммирования подключен к первому и второму входам первого умножителя, к одному из входов второго умножителя, второго блока суммирования, блока нелинейного степенного преобразования, а также выход первого блока суммирования подается на вход блока нахождения модуля, последовательно соединенного с блоком нелинейного степенного преобразования и блоком третьего умножителя, выход с блока третьего умножителя подается на один из входов второго блока суммирования, сигнал с которого подается на вход дополнительно введенного динамического корректора, а выход динамического корректора попадает на объект управления.
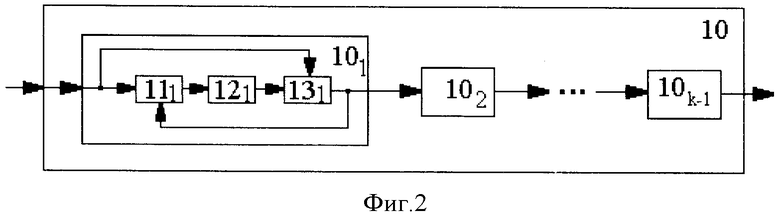
На фиг.1 представлена блок-схема предлагаемой системы; на фиг.2 - блока-схема динамического корректора.
Система содержит объект регулирования 1, первый блок задания коэффициентов 2, первый блок суммирования 3, первый умножитель 4, второй умножитель 5, второй блок суммирования 6, блок нахождения модуля 7, блок нелинейного степенного преобразования 8, третий умножитель 9 и блок динамического корректора 10. При этом динамический корректор состоит из последовательно соединенных k-1 одинаковых звеньев 101, 102,…,10k-1, каждое из которых содержит первый сумматор звена 11i, интегратор 12i, второй сумматор звена 13i при i=1, 2,…,k-1.
Сигналы у1,…,уm - выходы объекта регулирования, U - скалярное управляющее воздействие, удовлетворяющее уравнению
 ,
,
где γ1>0, γ2>0, γ3>0, 0≤q≤1 - постоянные; gT - числовой вектор; у - m-мерный вектор выходных координат объекта.
Система функционирует следующим образом.
Сигналы у1, …, уm с выходов объекта регулирования 1 поступают на соответствующие входы блока 2 задания коэффициентов, который представляет собой блок умножителей. В блоке 2 задания коэффициентов происходит умножение сигнала с i-го выхода объекта управления на постоянный коэффициент gi. Сигналы с выходов блока 2 задания коэффициентов поступают на соответствующие входы первого блока суммирования 3, где складываются. Сигналы gTу с выхода первого блока суммирования 3 поступают на оба входа первого умножителя 4, на второй вход второго умножителя 5, на вход блока нахождения модуля 7. В первом умножителе 4 происходит умножение сигнала с выхода первого блока суммирования 3 на этот же сигнал. Сигнал gTу поступает на второй вход второго умножителя 5, где происходит умножение его на сигнал (gTу)2. Полученный сигнал (gTу)3 поступает с выхода второго умножителя 5 на первый вход второго блока суммирования 6, на второй вход которого поступает сигнал gTу выхода первого блока суммирования 3. Сигнал gTу с выхода первого блока суммирования 3 поступает на вход блока нахождения модуля 7, с выхода которого сигнал  поступает на вход блока нелинейного степенного преобразования 8. Сигнал
поступает на вход блока нелинейного степенного преобразования 8. Сигнал  с выхода блока нелинейного степенного преобразования 8 поступает на первый вход третьего умножителя 9, где происходит его умножение на сигнал gTу, поступающий на второй вход третьего умножителя 9 с выхода первого блока суммирования 3. Во втором блоке суммирования 6 происходит сложение сигналов, полученных с выхода второго умножителя 5, выхода первого блока суммирования 3 и выхода третьего умножителя 9 с нужными коэффициентами. Сигнал с выхода второго блока суммирования 6 поступает на вход динамического корректора 10, состоящего из одинаковых, последовательно соединенных k-1 динамических звеньев 101, 102,…,10k-1 (k - разность порядков знаменателя и числителя передаточной функции объекта управления), каждое из которых имеет передаточную функцию
с выхода блока нелинейного степенного преобразования 8 поступает на первый вход третьего умножителя 9, где происходит его умножение на сигнал gTу, поступающий на второй вход третьего умножителя 9 с выхода первого блока суммирования 3. Во втором блоке суммирования 6 происходит сложение сигналов, полученных с выхода второго умножителя 5, выхода первого блока суммирования 3 и выхода третьего умножителя 9 с нужными коэффициентами. Сигнал с выхода второго блока суммирования 6 поступает на вход динамического корректора 10, состоящего из одинаковых, последовательно соединенных k-1 динамических звеньев 101, 102,…,10k-1 (k - разность порядков знаменателя и числителя передаточной функции объекта управления), каждое из которых имеет передаточную функцию
 ,
,
где T1>0, Т2>0 - постоянные времени, T1>>T2. В каждом звене 10i поступивший сигнал попадает в первый блок суммирования звена 11i и во второй блок суммирования звена 13i. В блоке суммирования 11i происходит суммирование входящего в звено сигнала и выхода сумматора 13i, сигнал с выхода сумматора 11i поступает на вход интегратора 12i, из которого подается на вход сумматора 13i, а выход из сумматора 13i попадает на вход следующего звена динамического корректора и т.д. Выход последнего звена 10k-1 подается на вход объекта управления 1.
Техническим результатом является расширение функциональных возможностей системы управления за счет повышения порядка числителя передаточной функции объекта управления.
Данное устройство может быть реализовано промышленным способом, на основе стандартной элементарной базы.
| название | год | авторы | номер документа |
|---|---|---|---|
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2178198C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2222040C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2006 |
|
RU2317579C1 |
| Система автоматического регулирования давления пара в магистрали барабанного котла | 2019 |
|
RU2746377C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2005 |
|
RU2282883C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ АСТАТИЧЕСКИМ ОБЪЕКТОМ С ЗАПАЗДЫВАНИЕМ | 2011 |
|
RU2468406C1 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ АСТАТИЧЕСКИХ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2010 |
|
RU2437137C2 |
| САМОНАСТРАИВАЮЩАЯСЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ОБЪЕКТОВ С ЗАПАЗДЫВАНИЕМ ПО УПРАВЛЕНИЮ | 2005 |
|
RU2281541C1 |
| АДАПТИВНАЯ СИСТЕМА УПРАВЛЕНИЯ ДЛЯ ДИНАМИЧЕСКИХ ОБЪЕКТОВ С ПЕРИОДИЧЕСКИМИ КОЭФФИЦИЕНТАМИ | 2010 |
|
RU2427870C1 |
| Устройство для автоматического управления роботом-манипулятором | 1986 |
|
SU1403016A1 |
Изобретение относится к системам автоматического управления и может быть использовано в системах регулирования объектами, параметры которых - неизвестные постоянные и меняющиеся со временем величины. Технический результат заключается в расширении функциональных возможностей системы управления. Он достигается тем, что система содержит объект регулирования, блок задания коэффициентов, первый и второй блок суммирования, последовательно соединенные первый умножитель и второй умножитель, последовательно соединенные блок нахождения модуля, блок нелинейного степенного преобразования, третий умножитель, причем выходы объекта управления соединены с соответствующими входами блока задания коэффициентов; сигналы с выходов блока задания коэффициентов поступают на соответствующие входы первого блока суммирования, выход первого блока суммирования подключен к первому и второму входам первого умножителя, к одному из входов второго умножителя, второго блока суммирования, также выход первого блока суммирования подключен ко входу блока нахождения модуля, выход блока третьего умножителя подключен к одному из входов второго блока суммирования, при этом дополнительно введен блок динамической коррекции, предназначенный для коррекции разности порядков знаменателя и числителя передаточной функции объекта управления. 2 ил.
Робастная система управления, содержащая объект регулирования, блок задания коэффициентов, первый и второй блок суммирования, последовательно соединенные первый умножитель и второй умножитель, последовательно соединенные блок нахождения модуля, блок нелинейного степенного преобразования, третий умножитель, причем выходы объекта управления соединены с соответствующими входами блока задания коэффициентов; сигналы с выходов блока задания коэффициентов поступают на соответствующие входы первого блока суммирования, выход первого блока суммирования подключен к первому и второму входам первого умножителя, к одному из входов второго умножителя, второго блока суммирования, также выход первого блока суммирования подключен ко входу блока нахождения модуля, выход блока третьего умножителя подключен к одному из входов второго блока суммирования, отличающаяся тем, что дополнительно введен блок динамической коррекции, предназначенный для коррекции разности порядков знаменателя и числителя передаточной функции объекта управления, при этом он состоит из последовательно соединенных k-1 одинаковых звеньев, каждое из которых содержит последовательно соединенные первый сумматор звена, интегратор, второй сумматор звена, причем вход первого сумматора звена связан со вторым входом второго сумматора звена, а выход второго сумматора звена связан со вторым входом первого сумматора звена и со следующим звеном динамического корректора, а выход последнего звена динамического корректора подается на вход объекта управления, где k - разность порядков знаменателя и числителя передаточной функции объекта управления.
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2002 |
|
RU2222040C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 1999 |
|
RU2156993C1 |
| РОБАСТНАЯ СИСТЕМА УПРАВЛЕНИЯ | 2000 |
|
RU2178198C1 |
| US 4698745 A, 06.10.1987. | |||

