Изобретение относится к ракетно-космической технике, а именно к способам стыковки ракеты с пусковой установкой, ее ветрового удержания и сопровождения при пуске а также устройствам для их реализации.
Известен способ стыковки и удержания ракеты на пусковой установке пусковой трубой, реализуемый устройством с использованием защелки, освобождаемой энергией потока газов (US, патент 4132150, F41F 3/04, 02.01.1979 г.).
Известно устройство для удержания ракеты на пусковой установке посредством закрепленных на ней опор в виде шаровых полусфер, взаимодействующих с выпуклыми полусферическими штоками дополнительной опоры стартового сооружения (RU, патент 2101218 В64G 1/40, 14.03.1996 г.).
Однако ни одно из них не может быть использовано для стыковки, удержания и сопровождения ракет различных компоновочных схем (тандемная, пакетная, комбинированная).
Наиболее близким из известных технических решений является выбранное в качестве прототипа устройство удержания ракеты на пусковой установке, содержащее закрепленную на ракете шарнирную опору, взаимодействующую со штоком механизма удержания, установленным на кронштейне наземного сооружения. Способ стыковки устройства заключается в совмещении осей и нанизывании шарнирной опоры ракеты на шток кронштейна пусковой установки в процессе размещения ракеты на пусковом столе, осуществляемый ручным поворотом элементов механизма удержания и перемещениями ракеты. (RU, патент 2226170 7 В64G 5/00, 27.03.2004 г.).
Однако стыковать пусковую установку с ракетно-космическими носителями, имеющими большие габариты и массу, рассмотренным способом и устройством невозможно, не предусматривает он и автоматизации или дистанционного управления, использования для семейства многоступенчатых ракет, выполненных по различным схемам компоновки, оптимизации параметров возмущающего воздействия при сходе ракеты с направляющих.
Требуемый технический результат достигается тем, что предварительно, перед стыковкой ПУ с ракетами различных классов семейства многоступенчатых ракет что после установки кронштейна ПУ в рабочее положение и стыковки его с шарнирными опорами ракеты механизмом удержания, расположению элементов шарнирного транслятора придают конфигурацию, соответствующую компоновке установленной на пусковом столе ракеты, при этом совмещают оси телескопической штанги механизма удержания посредством установленного на кронштейне привода, светоотражающих меток на ракете и лазерных рулеток на телескопической штанге привода с осью ракеты и размещают ее торец на необходимых для каждого типа ракеты расстоянии и высоте;
- совмещают посредством светоотражающих меток, установленных на обращенных к пусковой установке поверхностях шарнирных опор, лазерных рулеток, установленных на торцах балок линеек-шатунов и механизма шарнирного транслятора оси линеек-шатунов и балок с осями шарнирных опор ракеты;
- выдвигают балки из линеек-шатунов до касания направляющими планками устройств центрирования наружных поверхностей шарнирных опор;
- производят захват, удержание ракеты за внутренние поверхности шарнирных опор штоками устройств захвата и отвод направляющих планок устройств центрирования.
Устройство для осуществления способа включает закрепленные на ракете шарнирные опоры, взаимодействующие со штоками устройств захвата механизма удержания ракеты на кронштейне пусковой установки, снабжено приводом с телескопической штангой, конечное звено которой является составной частью механизма шарнирного транслятора для параллельных линеек-шатунов, в которых размещены балки с возможностью посредством гидроцилиндров совершать возвратно-поступательные перемещения, при этом, устройства захвата размещены на нижних сторонах балок и снабжены коленчатыми рычагами, установленными на качающихся опорах с возможностью воздействия, посредством гидроцилиндров на штоки устройств захвата, а верхние стороны балок оборудованы устройствами центрирования, оснащенными направляющими планками, установленными на опорах-коромыслах, кинематически связанных поводками с качающимися опорами устройств захвата.
Авторам предлагаемого изобретения не известны аналогичные технические решения, в связи с чем, по мнению авторов, заявляемая совокупность признаков соответствует критерию изобретения "существенные отличия" и критерию "новизна".
Устройство, осуществляющее предлагаемый способ поясняется чертежами.
На фиг.1а, б и в изображены вид сверху на взаимодействующий с ракетой легкого-а, среднего-б и тяжелого-в класса унитарный механизм захвата удержания и сопровождения, расположенный на кронштейне пусковой установки.
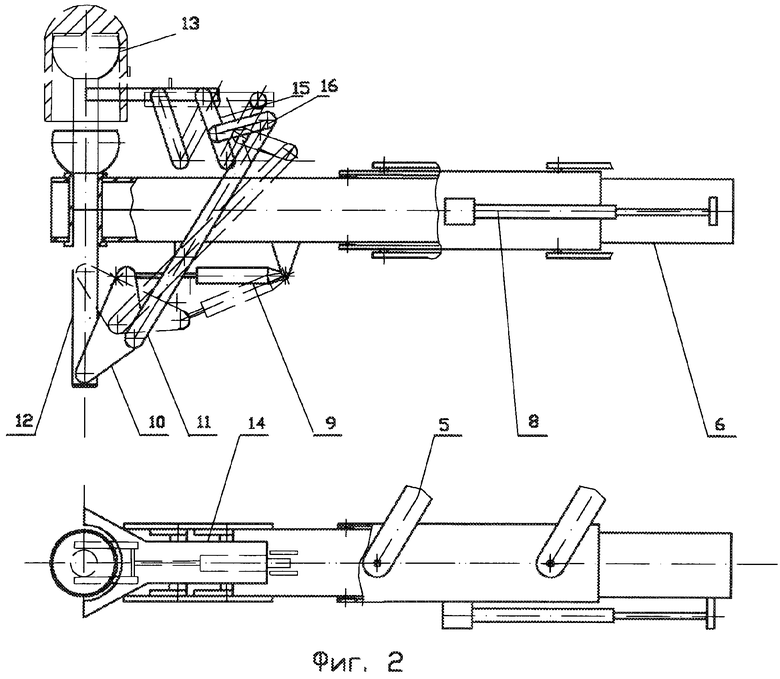
На фиг.2 - вид А на фиг.1.
Устройство для стыковки пусковой установки с ракетами различных классов состоит из установленного на кронштейне 1 пусковой установки привода 2 с телескопической штангой (фиг.1), на конечном звене которой установлен механизм шарнирного транслятора для параллельных линеек-шатунов 3, который выполнен с возможностью совершения круговых поступательных движений линеек-шатунов, посредством гидроцилиндров 4, взаимодействующих с рычагами-коромыслами 5 транслятора.
Линейки-шатуны 3 выполнены из коробчатого прямоугольного замкнутого профиля и являются направляющими для балок 6 с устройствами центрирования, захвата-удержания и сопровождения ракеты 7 и связаны с ними гидроцилиндрами 8.
Устройства захвата-удержания и сопровождения ракет состоят из гидроцилиндров 9, коленчатых рычагов 10, подвешенных на качающихся опорах 11 и штоков 12, взаимодействующих с шарнирными опорами ракет 13.
Устройства центрирования состоят из направляющих планок 14, установленных на качающихся опорах-коромыслах 15, которые кинематически связаны поводком 16 с качающимися опорами устройств захвата-удержания и сопровождения.
В гидросистему приводов включены гидрогазовые аккумуляторы, в систему управления - лазерные рулетки, фотодиоды и светоотражающие метки.
Реализацию предложенных способа и устройства рассмотрим на примере стыковки пусковой установки с ракетой, установленной на стартовой площадке.
После центрирования установщиком ракеты 7 на пусковом столе с кабель-заправочной башни выдвигается кронштейн 1 ветрового удержания ракеты с установленным на нем приводом 2 с телескопической штангой, конечное звено которой является составной частью механизма шарнирного транслятора, оснащенного устройствами центрирования, захвата-удержания и сопровождения ракеты.
Предварительно, в зависимости от того, какого класса ракета устанавливается на пусковом столе, расположению линеек-шатунов 3 посредством круговых поступательных перемещений под действием гидроцилиндров 4 и установленным в них балкам с устройствами центрирования, захвата-удержания и сопровождения, посредством возвратно-поступательных перемещений под действием гидроцилиндра 8, придается одна из конфигураций, показанных на фиг. 1.
Затем приводом 2, при помощи средств управления вручную, дистанционно или автоматически программными средствами, по светоотражающим меткам на ракете 7, устанавливается продольная ось Y телескопической штанги по центру ракеты 7 на необходимом, относительно шарнирных опор ракеты 13, расстоянии по осям Х и Y.
Далее, посредством гидроцилиндров 4, рычагов-коромысел 5, лазерных рулеток и фотодиодов, установленных на обращенных к ракете 7 торцах балок с устройствами центрирования, захвата-удержания и сопровождения, а также светоотражающих меток на шарнирных опорах ракеты 13, оси направляющих аппаратов (линеек-шатунов) 3 с балками 6 устанавливают соосно с осями шаровых опор ракеты 13 на необходимом от них расстоянии, при этом поршни гидроцилиндров 4 фиксируются гидрозамками.
После чего гидроцилиндры направляющих аппаратов 8 надвигают балки на шарнирные опоры ракеты 13 до касания направляющими планками 14 их наружных поверхностей, при этом оси Х и Y шаровых опор и штоков совмещаются.
Усилия нажатия направляющих 14 на шарнирные опоры 13 регулируются предохранительным клапаном гидросистемы, затем поршни гидроцилиндров 8 фиксируются гидрозамками и включается подача рабочей жидкости в гидроцилиндры 9 устройств захвата-удержания и сопровождения ракеты 7. Штоки гидроцилиндров 9 поворачивают коленчатые рычаги 10, установленные на качающихся опорах 11 и вдвигают штоки 12 во внутренние полости шарнирных опор 13 ракеты 7, соединяя кронштейн 1 кабель-заправочной башни с ракетой 7.
При этом качающиеся опоры 11 коленчатых рычагов 10, соединенные поводками 16 с опорами-коромыслами 15 направляющих планок 14, отводят направляющие планки 14 от наружных поверхностей шарнирных опор 13 ракеты 7, исключая возможность зажатия штоков 12 в шарнирных опорах 13 при пуске.
В этом положении устройство захвата вместе с кронштейном 1, на котором оно установлено, выполняет функцию удержания ракеты 7 на пусковом столе с заданной разработчиками жесткостью в пределах диапазона допускаемых нагрузок, возникающих при заправке и ветровом воздействии. Для этого в гидросистему привода устройства захвата и кронштейна 1 включены гидрогазовые аккумуляторы с характеристиками, обеспечивающими заданные параметры, что позволяет при сходе ракеты с направляющих, после расстыковки всех бортовых соединителей, получить минимальные значения возмущающих воздействий на запрограммированную траекторию ее движения.
Простота способа стыковки пусковой установки с ракетами различных классов и устройства для его реализации, надежность кинематики механизмов, осуществление захвата шарнирных опор ракет при минимальных усилиях взаимодействия, достаточные для удержания прочность и жесткость, обеспечивающие задаваемые параметры отклонений при сопровождении, универсальность применения, возможность автоматизации процесса стыковки позволяет использовать предлагаемый способ и устройство в перспективных пусковых установках.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И УДЕРЖАНИЯ УСТАНОВЩИКА С РАКЕТОЙ-НОСИТЕЛЕМ НА ПУСКОВОМ СТОЛЕ В ВЕРТИКАЛЬНОМ ПОЛОЖЕНИИ | 2011 |
|
RU2477247C1 |
| ТРАНСПОРТНО-УСТАНОВОЧНЫЙ АГРЕГАТ УНИВЕРСАЛЬНОГО СТАРТОВОГО КОМПЛЕКСА КОСМИЧЕСКОГО РАКЕТНОГО КОМПЛЕКСА | 2007 |
|
RU2350523C1 |
| ТРАНСПОРТНО-УСТАНОВОЧНЫЙ АГРЕГАТ СТАРТОВОГО РАКЕТНОГО КОМПЛЕКСА | 2011 |
|
RU2478539C2 |
| ТРАНСПОРТНО-УСТАНОВОЧНЫЙ АГРЕГАТ СТАРТОВОГО КОМПЛЕКСА РАКЕТ КОСМИЧЕСКОГО НАЗНАЧЕНИЯ | 2018 |
|
RU2680470C1 |
| Универсальная корабельная пусковая установка вертикального пуска | 2021 |
|
RU2767097C1 |
| МОБИЛЬНАЯ ПУСКОВАЯ СИСТЕМА ДЛЯ ТРАНСПОРТИРОВКИ И ПУСКА РАКЕТ ИЗ ТРАНСПОРТНО-ПУСКОВЫХ КОНТЕЙНЕРОВ ПРИ ПОМОЩИ ПОРОХОВЫХ АККУМУЛЯТОРОВ ДАВЛЕНИЯ ИЛИ ПАРОГАЗОГЕНЕРАТОРВ | 2014 |
|
RU2568820C2 |
| КУЛЬТИВАТОР | 1995 |
|
RU2090025C1 |
| УНИВЕРСАЛЬНЫЙ МОДУЛЬ ФИКСАЦИИ РАКЕТ В ПУСКОВОЙ УСТАНОВКЕ | 2015 |
|
RU2613205C2 |
| МОБИЛЬНАЯ ПУСКОВАЯ УСТАНОВКА | 2015 |
|
RU2620007C2 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ ТРАНСПОРТНО-ПУСКОВОГО КОНТЕЙНЕРА В ПУСКОВУЮ УСТАНОВКУ КОРАБЛЯ | 2000 |
|
RU2176610C1 |
Изобретения относятся к наземному оборудованию для ракетно-космической техники и к проводимым на нем работам. Предлагаемое устройство содержит закрепленные на ракете качающиеся опоры, взаимодействующие со штоками устройств захвата механизма удержания. Этот механизм установлен на кронштейне пусковой установки, где также размещен привод с телескопической штангой. Конечное звено штанги выполнено в виде механизма шарнирного транслятора параллельных линеек-шатунов, в которых размещены балки. Балки могут перемещаться возвратно-поступательно с помощью гидроцилиндров. Устройства захвата размещены на нижних сторонах балок и снабжены коленчатыми рычагами, установленными на указанных качающихся опорах. Рычаги действуют через гидроцилиндры на штоки устройств захвата. Верхние стороны балок оборудованы устройствами центрирования с направляющими планками, кинематически связанными с качающимися опорами. Согласно предлагаемому способу перед стыковкой элементам шарнирного транслятора придают конфигурацию, соответствующую компоновке установленной на пусковом столе ракеты. Ось телескопической штанги выставляют на необходимых для данного типа ракеты расстоянии и высоте. Затем механизмом шарнирного транслятора совмещают оси линеек-шатунов и балок с осями шарнирных опор ракеты. Выдвигают балки до касания направляющими планками поверхностей шарнирных опор ракеты и производят захват и удержание последней. Техническим результатом изобретений являются простота и надежность стыковки пусковой установки с ракетами различных классов, работа механизмов при минимальных усилиях и при достаточных для удержания ракеты прочности и жесткости, универсальность применения, возможность автоматизации процесса стыковки. 2 н.п. ф-лы, 2 ил.
| УСТРОЙСТВО БОКОВОГО УДЕРЖАНИЯ РАКЕТЫ НА ПУСКОВОЙ УСТАНОВКЕ | 2001 |
|
RU2226170C2 |
| РАКЕТОНОСИТЕЛЬ | 1996 |
|
RU2101218C1 |
| РАКЕТНЫЙ СТАРТОВЫЙ КОМПЛЕКС | 1996 |
|
RU2097675C1 |
| РАКЕТОНОСИТЕЛЬ | 1995 |
|
RU2090461C1 |
| US 4932607 A, 12.06.1990. | |||

