Изобретение относится к области измерительной техники, в частности к микромеханическим гироскопам (ММГ) и устройствам преобразования сигналов в них.
Известны микромеханические гироскопы и устройства преобразования электрических сигналов в них (см. пат. США №№6571630, 6715353, 5992233, 6370937, 5672949). Выходной сигнал датчика по выходной координате гироскопа может содержать помимо полезного сигнала помехи: квадратурную помеху (так называют составляющую сигнала, фаза которой сдвинута на 90° по отношению к полезной составляющей) и составляющие от силового сигнала. Разные методы подавления квадратурной помехи используются в технике: так, в гироскопе по пат. США №6715353 используют параметрический резонанс, в устройствах по пат. США №№6571630, 5992233, 6370937 формируют напряжения на специальных электродах. Недостатком этих устройств является сложность конструкции, обусловленная необходимостью введения дополнительных электродов и контуров регулирования.
Устройство преобразования электрических сигналов ММГ, приведенное на фиг.8 пат. США №6626039, является наиболее близким к предлагаемому устройству и выбрано в качестве прототипа.
ММГ вибрационного типа по пат. США №6626039, включающего в себя подвижный механический элемент (ротор на торсионном подвесе), гребенчатый двигатель (на фиг.8 его электроды обозначены Сt1, Сt2) и емкостные датчики перемещения ротора по оси первичных колебаний и выходной оси (на фиг.8 электроды, образующие с электронными узлами соответствующие датчики, обозначены Cs1, Cs2 и Cd1, Cd2). Емкостной датчик перемещения ротора по оси первичных колебаний включает в себя усилители 56, 57, демодулятор 62 и фильтр низкой частоты (ФНЧ) 63. Аналогично построен и емкостной датчик перемещения ротора по выходной оси (на элементах 58, 59, 64 и 65). Для возбуждения этих датчиков используется высокочастотный источник с противофазными выходами на элементах 51, 52, выходной сигнал которого поступает на демодуляторы 62, 64. Выходные сигналы этих емкостных датчиков поступают далее на вход устройства преобразования сигналов ММГ, которое содержит фазовращательное устройство (элемент 67) и демодулятор 66 с ФНЧ 68. На вход элемента 66 от емкостного датчика перемещения ротора по выходной оси поступает сигнал Uвх, содержащий полезную составляющую Uп и квадратурную помеху Uкв, которая совпадает по фазе с сигналом с выхода емкостных датчиков перемещения ротора по оси первичных колебаний
Uвх(t)=Uп(t)+Uкв(t)=UпSin(ωt)+Uкв(t)Cos(ωt). (1)
Вносимый фазовый сдвиг ϕ элемента 67 в идеальном случае равен 90°, что обеспечивает полное подавление квадратурной помехи Uкв.
Однако, в случае отклонения угла от 90° на угол α, получим, что выходной сигнал демодулятора 66 Uвых(t)
Uвых(t)=Uвх(t)Sin(ωt+α). (2)
На выходе ФНЧ 68 после фильтрации высокочастотных составляющих сигнал (U88) будет определяться выражением
U88=UпCos(α)+UквSin(α). (3)
Отметим, что влияние угла α проявляется в изменении масштабного коэффициента (первый член) и смещении нуля (второй член выражения 3). Причем влияние угла α (при малых α) на масштабный коэффициент значительно меньше, чем на смещение нуля даже при величинах Uп, Uкв одного порядка. А учитывая, что эти величины могут отличаться на несколько порядков, можно сделать заключение, что одной из основных причин, определяющих дрейф нуля ММГ, являются нестабильности вносимого фазового сдвига и большая величина квадратурной помехи.
Отметим, что емкостные датчики ММГ могут быть запитаны от источника постоянного напряжения, как это показано в пат. США №5672949 или в пат. США №6253612 на фиг.3d. В этом случае элементы 51, 52 и 62-65 не используются, однако состав устройства преобразования электрических сигналов остается тем же.
Изобретение решает задачу повышения точности ММГ.
Поставленная задача в предлагаемом устройстве решается тем, что в устройство преобразования сигналов микромеханического гироскопа вибрационного типа введены суммирующий усилитель, первый вход которого соединен с выходом емкостного датчика перемещения подвижного механического элемента по выходной оси, первый умножитель, первый вход которого подключен к выходу введенного суммирующего усилителя, дополнительный усилитель, вход которого подключен к выходу первого умножителя, второй умножитель, первый вход которого подключен к выходу дополнительного усилителя, выход второго умножителя соединен со вторым входом суммирующего усилителя, при этом вторые входы введенных умножителей соединены с выходом емкостного датчика перемещения подвижного механического элемента по оси первичных колебаний.
Кроме того, поставленная задача решается тем, что дополнительный усилитель выполнен по схеме интегратора.
Основное преимущество предлагаемого изобретения (уменьшение влияния второго члена в выражении 3 на выходной сигнал) обусловлено заявленной совокупностью признаков.
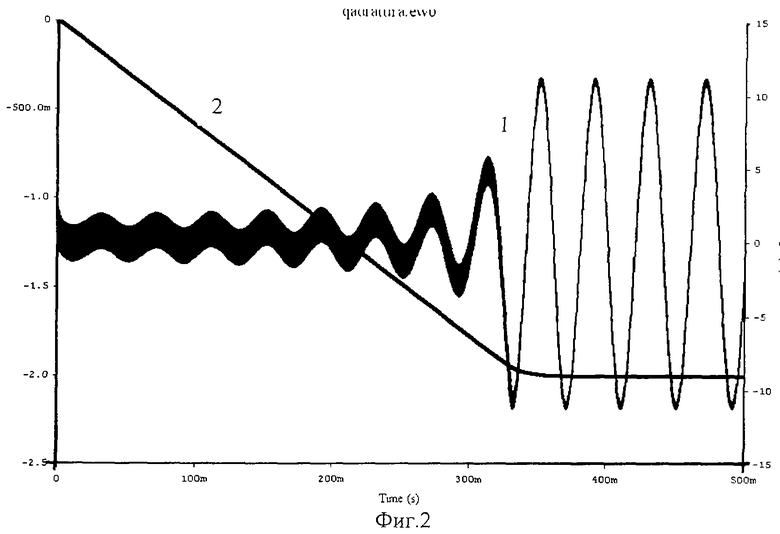
Заявленное устройство поясняется чертежами. На фиг.1 приведена блок-схема ММГ с предложенным устройством и приняты следующие обозначения:
1 - ММГ
2, 3 - емкости датчика перемещения ротора по оси первичных колебаний
4, 5 - емкости датчика перемещения ротора по выходной оси
6, 7 - источники постоянного напряжения
8, 9 - усилители с инвертирующим входом
10, 11 - резисторы
12, 13, 23 - конденсаторы
14, 19, 21 - умножители
15 - фазовращатель
16 - суммирующий усилитель
17 - узел суммирования
18 - усилитель
20 - дополнительный усилитель
22 - фильтр низкой частоты (ФНЧ)
На фиг.2 приведены графики сигналов в предложенном устройстве и приняты следующие обозначения:
1 - изменение во времени сигнала на выходе элемента 20 при скачке на входе элемента 16 сигнала, с квадратурной помехой и полезной составляющей
2 - сигнал на выходе элемента 22
В ММГ 1 емкости датчика перемещения ротора по оси первичных колебаний 2, 3 образованы гребенками, расположенными на подвижной массе или роторе и гребенками статоров, а емкости датчика перемещения ротора по выходной оси 4, 5 образованы подвижной массой или ротором и соответствующими электродами, расположенными на основании. К статорам и электродам, расположенным на основании, подключены выводы источников питания 6, 7. Общие выводы емкостей 2, 3 и 4, 5 подключены соответственно к инвертирующим входам усилителей 8, 9, между выходами которых и входами включены соответственно резисторы 10, 11 и конденсаторы 12, 13. Элементы 2, 3, 8, 10, 12 образуют емкостный датчик перемещения подвижного механического элемента по оси первичных колебаний, а элементы 4, 5, 9, 11, 13 образуют емкостный датчик перемещения подвижного механического элемента по выходной оси.
Предложенное устройство содержит умножитель 14 и фазовращательное устройство 15. Суммирующий усилитель 16, образованный элементами 17, 18, соединен входом с выходом емкостного датчика перемещения подвижного механического элемента по выходной оси и выходом с входом умножителя 14. Умножитель 19 соединен входом с выходом суммирующего усилителя 16, выходом с входом усилителя 20, выход которого подключен к входу умножителя 21. Выход емкостного датчика перемещения подвижного механического элемента по оси первичных колебаний соединен со вторыми входами умножителей 19, 21 и входом фазовращателя 15, выход которого соединен с одним из входов элемента 14. Выход последнего соединен с входом ФНЧ 22. Между инвертирующим входом и выходом усилителя 20 включен конденсатор 23.
Устройство работает следующим образом.
Сигнал на выходе усилителя 9 содержит полезную и квадратурную составляющие (см. выражение 1). Он усиливается элементом 16 и поступает на вход умножителя 19. Поскольку на другой вход умножителя 19 поступает напряжение той же частоты, что и на его другой вход, элемент 19 осуществляет фазочувствительное детектирование входного сигнала и выделяет сигнал, синфазный с сигналом, поступающим от усилителя 9, т.е. квадратурную помеху. Выделенный сигнал усиливается усилителем 20 и вновь модулируется тем же сигналом с помощью умножителя 21. Выходной сигнал умножителя 21 суммируется с сигналом от усилителя 9. Поскольку квадратурная помеха и выходной сигнал умножителя 21 находятся в противофазе, происходит подавление квадратурной помехи. Если дополнительный усилитель выполнен как интегратор (т.е. в нем включен конденсатор 23), то в предложенном устройстве происходит максимальное подавление квадратурной помехи. Благодаря подавлению квадратурной помехи можно значительно увеличить коэффициент усиления элемента 16 и повысить уровень сигнала на входе элемента 14. Отметим, что в прототипе допустимый коэффициент усиления усилителя перед демодулятором (элемент 57 на fig.8 прототипа) определяется квадратурной помехой, которая на несколько порядков выше полезного сигнала. Выходной сигнал элемента 16 с уже подавленной квадратурной помехой перемножается с сигналом, сдвинутым на 90° по отношению к напряжению на выходе емкостного датчика по оси первичных колебаний, т.е. с синфазным сигналом. Поскольку второй член в выражении (1) в предложенном усилителе мал, то и выделенная постоянная составляющая на выходе элемента 14, который выполняет функцию демодулятора, практически не содержит составляющую Uкв Sin (α). Демодуляторы могут быть выполнены и по другим схемам (см. "Проектирование и применение операционных усилителей"/ Под ред. Дж.Грэма, Дж.Тоби, Л.Хьюлсмана, Издательство "Мир", Москва, 1974, 510 стр., стр. 447-452 фиг.11.16а).
Предлагаемое устройство допускает использование и с другими типами емкостных датчиков, описанных в литературе (например, в пат. США №6253612, fig3).
Сигналы, приведенные на фиг.2, получены в результате моделирования предложенного устройства при полезном сигнале в 100 раз меньшем по уровню, чем квадратурная помеха. Сигнал на выходе интегратора изменяется до тех пор, пока сигнал с выхода элемента 21 не сравняется с квадратурной помехой на выходе усилителя 9. Пока квадратурная помеха не подавлена, усилитель 18 находится в режиме насыщения и полезная составляющая сигнала практически не выделяется. Затем (примерно к 350 мсек) полезная составляющая появляется на выходе без искажений.
Изобретение относится к измерительной технике, в частности к микромеханическим гироскопам (ММГ). В устройство преобразования сигналов микромеханического гироскопа вибрационного типа введены суммирующий усилитель, первый вход которого соединен с выходом емкостного датчика перемещения подвижного механического элемента по выходной оси, первый умножитель, первый вход которого подключен к выходу емкостного датчика перемещения подвижного механического элемента по выходной оси, дополнительный усилитель, вход которого подключен к выходу первого умножителя, второй умножитель, первый вход которого подключен к выходу дополнительного усилителя, выход второго умножителя соединен со вторым входом суммирующего усилителя, при этом вторые входы введенных умножителей соединены с выходом емкостного датчика перемещения подвижного механического элемента по оси первичных колебаний. Дополнительный усилитель может быть выполнен по схеме интегратора. Техническим результатом является повышение точности. 1 з.п. ф-лы, 2 ил.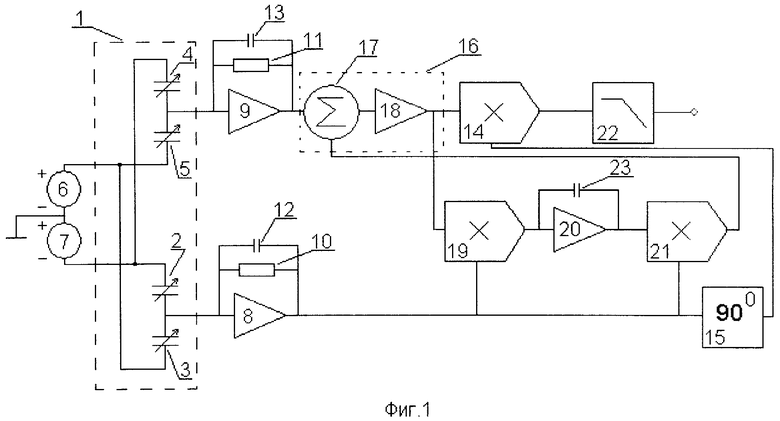
| US 6626039 B1, 30.09.2003 | |||
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2001 |
|
RU2209394C2 |
| US 6715353 B2, 06.04.2004 | |||
| US 5672949 А, 30.09.1997 | |||
| US 6370937 B2, 16.04.2002 | |||
| Триер | 1978 |
|
SU704674A2 |

