Изобретение относится к гироскопической технике и может быть использовано в системах управления подвижных объектов различного назначения, а также в качестве измерителей и индикаторов движения объектов.
Известны микромеханические вибрационные гироскопы (ММВГ) [1,2,3] .
Особенностью ММВГ является изготовление чувствительных элементов этих приборов преимущественно из материалов на основе кремния по кремниевой технологии, что предопределяет:
- малые габариты и вес ММВГ;
- возможность применения групповой технологии изготовления, и, следовательно, дешевизну при массовом производстве;
- высокую надежность в эксплуатации.
Недостатками известных ММВГ является малая точность вследствие геометрических погрешностей изготовления чувствительных элементов ММВГ, а также вследствие температурных и временных нестабильностей их статических и динамических характеристик.
Известен микромеханический вибрационный гироскоп [4] , содержащий корпус, в котором размещен инерционный элемент, расположенный в рамке, соединенной с корпусом и инерционным элементом посредством двух пар упругих элементов (торсионов), расположенных по ортогональным осям и являющимися осями угловых перемещений соответственно рамки и инерционного элемента, датчики угла и датчики момента по осям рамки и инерционного элемента, а также блок возбуждения колебаний на частоте ω, выход которого соединен с датчиком момента по оси инерционного элемента.
Недостатком указанного ММВГ является его малая точность вследствие одной из основных погрешностей данного типа вибрационных гироскопов, связанной с неперпендикулярностью осей подвеса рамки и инерционного элемента, а также с несовпадением оси подвеса инерционного элемента с его главной осью инерции.
Целью и техническим результатом изобретения является повышение точности ММВГ за счет уменьшения влияния вышеуказанных "геометрических" погрешностей.
Поставленная цель достигается тем, что в известный микромеханический гироскоп, содержащий корпус, в котором размещен инерционный элемент, расположенный в рамке, соединенной с корпусом и инерционным элементом посредством двух пар упругих элементов, расположенных по ортогональным осям и являющимися осями угловых перемещений соответственно рамки и инерционного элемента, датчики угла и датчики момента по осям рамки и инерционного элемента, а также блок возбуждения колебаний на частоте ω, выход которого соединен с датчиком момента по оси инерционного элемента, дополнительно введен блок стабилизации колебаний на частоте 2ω, первый вход которого соединен с выходом блока возбуждения колебаний на частоте ω, второй вход соединен с датчиком угла по оси рамки, а выходы блока соединены с датчиком момента по оси рамки.
Кроме того:
- инерционный элемент выполнен в виде стержня, ось которого параллельна оси рамки, а на концах стержня расположены элементы из тяжелого металла,
блок возбуждения колебаний на частоте ω выполнен по схеме автогенератора, вход которого соединен с датчиком угла по оси инерционного элемента;
блок стабилизации колебаний на частоте 2ω содержит умножитель частоты, формирователь импульсов, измеритель фазы и формирователь напряжения, при этом вход умножителя частоты является первым входом блока стабилизации колебаний, выход умножителя частоты соединен с первыми входами формирователя импульсов и измерителя фазы, второй вход измерителя фазы является вторым входом блока стабилизации колебаний и соединен со вторым входом формирователя импульсов, выход измерителя фазы соединен с входом формирователя напряжения, а выходы формирователя импульсов и формирователя напряжения являются выходами блока стабилизации колебаний, при этом выход формирователя импульсов является и выходом гироскопа;
блок стабилизации колебаний на частоте 2ω может содержать последовательно соединенные умножитель частоты, звено фазового сдвига на 90o, первый фазочувствительный выпрямитель и формирователь напряжения, а также второй фазочувствительный выпрямитель и формирователь импульсов, при этом вход умножителя частоты является первым входом блока стабилизации колебаний, выход умножителя частоты дополнительно соединен с первыми входами второго фазочувствительного выпрямителя и формирователя импульсов, второй вход второго фазочувствительного выпрямителя является вторым входом блока и соединен со вторым входом первого фазочувствительного выпрямителя, выход второго фазочувствительного выпрямителя соединен со вторым входом формирователя импульсов, а выходы формирователя напряжения и формирователя импульсов являются выходами блока стабилизации колебаний, при этом выход формирователя импульсов является и выходом гироскопа.
Заявителем проведены теоретические исследования вибрационного гироскопа рамочной конструкции с возбуждением инерционного элемента на частоте ω [5] . Выявлено, что в таком гироскопе полезный гироскопический момент, пропорциональный проекции угловой скорости основания Ω на ось рамки  и действующий по оси рамки, изменяется с частотой 2ω. Составляющие же вредного момента, обусловленные ранее указанными "геометрическими" погрешностями, а именно неперпендикулярностью осей подвеса инерционного элемента и рамки, а также несовпадением оси подвеса инерционного элемента с его главной осью инерции, изменяются с частотой возбуждения ω. В связи с этим предложено осуществлять настройку в резонанс выходного колебательного звена и проведение съема информации на двойной частоте по отношению к частоте возбуждения. Тем самым минимизируется влияние вышеуказанных погрешностей.
и действующий по оси рамки, изменяется с частотой 2ω. Составляющие же вредного момента, обусловленные ранее указанными "геометрическими" погрешностями, а именно неперпендикулярностью осей подвеса инерционного элемента и рамки, а также несовпадением оси подвеса инерционного элемента с его главной осью инерции, изменяются с частотой возбуждения ω. В связи с этим предложено осуществлять настройку в резонанс выходного колебательного звена и проведение съема информации на двойной частоте по отношению к частоте возбуждения. Тем самым минимизируется влияние вышеуказанных погрешностей.
Выявлено также, что для дальнейшего уменьшения влияния "геометрических" погрешностей и увеличения чувствительности гироскопа следует выполнять следующее условие: суммарный момент инерции инерционного элемента и рамки относительно оси рамки должен быть существенно меньше момента инерции инерционного элемента относительно его собственной оси. Такому условию удовлетворяет выполнение инерционного элемента в форме стержня, ось которого параллельна оси рамки. Кроме того, выполнение инерционного элемента в форме стержня улучшает конструкцию прибора, делая ее более плоской, компактной и технологичной. Для увеличения момента инерции на концах стержня могут быть расположены дополнительные элементы из тяжелого металла (например, золота).
Реализация блока возбуждения колебаний по схеме автогенератора обеспечивает возбуждение колебаний инерционного элемента на собственной частоте, что требует минимум энергии для раскачки и поддержания требуемой амплитуды. Кроме того нет необходимости в регулировке фазы и не требуется специальной схемы подстройки частоты возбуждения.
Сущность изобретения поясняется чертежами, где предоставлено:
фиг. 1 - конструктивная схема чувствительного элемента ММВГ (вид сверху, крышка корпуса снята);
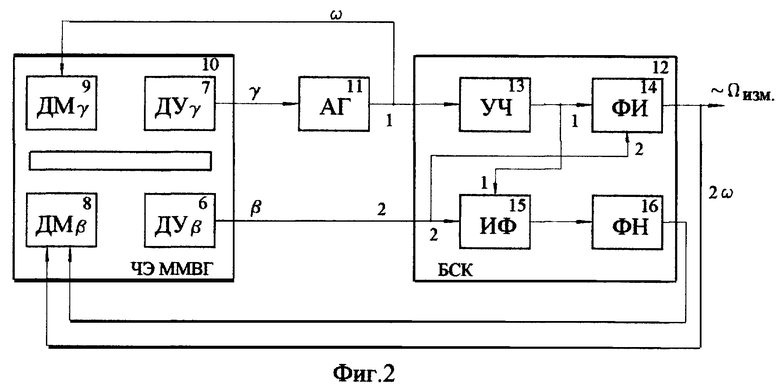
фиг. 2 - функциональная схема ММВГ;
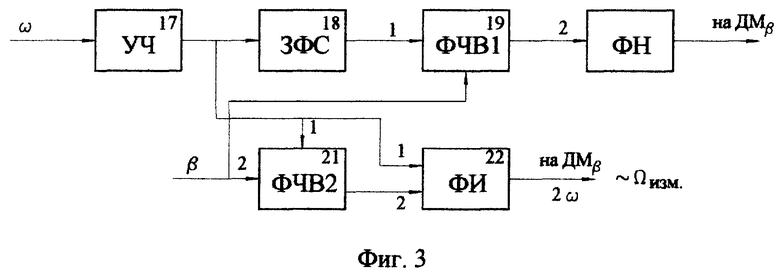
фиг. 3 - функциональная схема другого варианта выполнения блока стабилизации колебаний на частоте 2ω.
Чувствительный элемент ММВГ представляет собой плоскую конструкцию и согласно изобретению содержит корпус 1 (фиг. 1), в котором размещен инерционный элемент 2 с элементами из тяжелого металла 2'. Инерционный элемент расположен в рамке 3, соединенной с корпусом 1 и инерционным элементом 2 посредством двух пар упругих элементов (торсионов) 4, 5, расположенных по ортогональным осям X, У, в идеале являющимися осями β,γ угловых перемещений рамки 3 и инерционного элемента 2 соответственно.
Корпус 1, инерционный элемент 2, рамка 3, торсионы 4, 5 могут быть выполнены единым элементом из кремния, стекла или кварца (например, методами травления). Инерционный элемент имеет форму стержня, ось которого параллельна оси рамки. На концах стрежня выполнены (например, напылением) элементы из тяжелого металла (золота) 2'.
Моменты инерции инерционного элемента и рамки, а также жесткости торсионов обеспечиваются из расчета соотношения 1: 2 собственных частот колебаний по оси возбуждения γ и выходной оси β.
На рамке 3 и инерционном элементе 2 выполнены элементы датчиков угла (ДУ) 6, 7 и элементы датчиков момента (ДМ) 8, 9. Взаимодействующие с ними ответные элементы ДУ и ДМ выполнены на крышке корпуса (на фиг. 1 не показано).
В качестве датчиков момента могут быть использованы электростатические датчики, а в качестве датчиков угла - емкостные или датчики на основе полевого транзистора с подвижным затвором [6] , обладающие высокой чувствительностью и крутизной.
Функциональная схема предложенного устройства представлена на фиг. 2. Схема включает в себя чувствительный элемент гироскопа (ЧЭ ММВГ) 10, блок возбуждения колебаний на частоте ω, выполненный по схеме автогенератора (АГ) 11, и блок стабилизации колебаний на частоте 2ω (БСК) 12. Вход блока возбуждения колебаний (автогенератора) 11 соединен с датчиком угла 7 по оси инерционного элемента, а выход соединен с датчиком момента 9 по той же оси и с первым входом блока стабилизации колебаний 12. Второй вход блока стабилизации колебаний 12 соединен с датчиком угла 6 по оси рамки, а выходы блока соединены с датчиком момента 8 по той же оси.
Блок стабилизации колебаний 12 (фиг. 2) содержит умножитель частоты на два (УЧ) 13, формирователь импульсов (ФИ) 14, измеритель фазы (ИФ) 15 и формирователь напряжения (ФН) 16. Вход умножителя частоты 13, соединенный с выходом автогенератора 11, является первым входом блока стабилизации колебаний 12. Выход умножителя частоты 13 соединен с первыми входами формирователя импульсов 14 и измерителя фазы 15. Второй вход измерителя фазы 15, соединенный с датчиком угла 6 по оси рамки, является вторым входом блока стабилизации колебаний и соединен со вторым входом формирователя импульсов 14, а выход измерителя фазы 15 соединен с входом формирователя напряжения 16. Выходы формирователя импульсов 14 и формирователя напряжения 16 являются выходами блока и соединены с датчиком момента 8 по оси рамки, при этом выход формирователя импульсов 14 является и выходом гироскопа, так как содержит информацию о величине Ωизм проекции угловой скорости основания Ω на ось рамки.
На фиг. 3 представлена другая схема реализации блока стабилизации колебаний. Данная схема содержит последовательно соединенные умножитель частоты на два (УЧ) 17, звено фазового сдвига на 90o (ЗФС) 18, первый фазочувствительный выпрямитель (ФЧВ1) 19 и формирователь напряжения (ФН) 20, а также второй фазочувствительный выпрямитель (ФЧВ2) 21 и формирователь импульсов (ФИ) 22. Вход умножителя частоты 17 является первым входом блока, а выход умножителя частоты 17 дополнительно соединен с первыми входами второго фазочувствительного выпрямителя 21 и формирователя импульсов 22. Второй вход второго фазочувствительного выпрямителя 21 является вторым входом блока и соединен со вторым входом первого фазочувствительного выпрямителя 19, а выход второго фазочувствительного выпрямителя 21 соединен со вторым входом формирователя импульсов 22. Выходы формирователя напряжения 20 и формирователя импульсов 22 являются выходами блока и соединены с датчиком момента 8 по оси рамки, при этом выход формирователя импульсов 22 является и выходом гироскопа.
Схемы, представленные на фиг. 2, 3 обеспечивают решение следующих задач:
- поддержание постоянной амплитуды колебаний инерционного элемента по оси возбуждения γ и постоянной амплитуды колебаний рамки по выходной оси β;
- поддержание необходимого соотношения частот колебаний по осям γ и β, равного 1: 2;
- поддержание фазы колебаний по выходной оси β равной  по отношению к фазе колебаний по оси возбуждения γ.
по отношению к фазе колебаний по оси возбуждения γ.
Назначение функциональных элементов 13-22 ясно из их названия. Выполнены они могут быть по известным схемам аналоговой и импульсной электронной техники.
Схема блока стабилизации колебаний 12 на частоте 2ω, структура которого раскрыта на фиг. 2, позволяет просто и надежно выполнить поставленные перед ней задачи.
Схема блока стабилизации колебаний представленная на фиг. 3 более сложна в реализации, однако обладает повышенной точностью за счет более точного определения расстройки по собственной частоте колебаний по выходной оси β.
Работа предложенного устройства осуществляется следующим образом.
Блок возбуждения колебаний, выполненный по схеме автогенератора 11 по сигналу с датчика угла ДУγ 1, возбуждает колебания инерционного элемента на собственной частоте ω и обеспечивает постоянство амплитуды этих колебаний.
При наличии угловой скорости основания Ω возникает переменный гироскопический момент, полезная составляющая которого, действующая вокруг оси рамки и пропорциональная проекции Ωизм угловой скорости Ω на эту ось, изменяется с частотой 2ω. Под действием этого момента вокруг оси рамки возникают колебания с частотой 2ω.
Сигнал с автогенератора 11 частотой ω поступает на умножитель частоты на два 13, с которого сигнал удвоенной частоты 2ω поступает на формирователь импульсов 14 и измеритель фазы 15 в качестве опорного.
На второй вход формирователя импульсов 14 поступает сигнал с датчика угла ДУβ 6 по оси рамки. По этому сигналу формирователь импульсов вырабатывает управляющие импульсы частотой 2ω, амплитуда или ширина которых (в зависимости от используемой модуляции) обеспечивает посредством датчиков момента ДМβ 8 поддержание заданной амплитуды колебаний по выходной оси β и несет в себе информацию о величине проекции Ωизм.
Измеритель фазы 15 сравнивает опорный сигнал с умножителя частоты 13 с сигналом, поступающим с датчика угла ДУβ 6, и формирует сигнал, пропорциональный разности фаз поступающих сигналов. Этот сигнал позволяет судить об отличии собственной частоты по оси β от частоты 2ω. По этому сигналу формирователь напряжения вырабатывает постоянное напряжение коррекции собственной частоты по оси β. Это напряжение посредством датчика момента ДМβ 8 создает дополнительную "отрицательную" или "положительную" жесткость (в зависимости от фазы сигнала) и тем самым изменяет собственную частоту колебательного контура по оси β, обеспечивая настройку указанного контура на частоту 2ω.
Датчик момента ДМβ/ 8 для решения вышеуказанных задач может иметь несколько управляющих электродов, одни из которых будут подключены к формирователю импульсов 14, другие - к формирователю напряжения 15.
Заявленное устройство с блоком стабилизации колебаний, схема которого приведена на фиг. 3, работает аналогично в части управления колебаниями по оси возбуждения γ. По другому решена задача управления колебаниями по выходной оси β. В этой схеме с помощью двух фазочувствительных выпрямителей и звена фазового сдвига происходит разделение синусной и косинусной составляющих колебаний по оси β. При возбуждении колебаний по оси γ синусным моментом сами колебания будут косинусными, следовательно, колебания по оси β должны происходить по закону косинуса двойной частоты. Расстройка собственной частоты по оси β от двойной частоты колебаний по оси γ приводит к возникновению синусной составляющей в колебаниях по оси β. То есть в данном случае косинусная составляющая колебаний по оси β содержит информацию о входной угловой скорости, а синусная - о расстройке по частоте, и, выделяя синусную составляющую, можно осуществлять подстройку собственной частоты по оси β.
Для реализации вышеизложенного сигнал с умножителя частоты на два 17 поступает на звено фазового сдвига на 90o 18 и далее на первый фазочувствительный выпрямитель 19 в качестве опоры. На первый фазочувствительный выпрямитель 19 поступает так же сигнал с датчика угла ДУβ 6. Сигнал с ФЧВ1 19, пропорциональный отличию собственной частоты колебаний по оси β от частоты 2ω,поступает на формирователь напряжения 20, вырабатывающий постоянное напряжение коррекции собственной частоты по оси β.
На второй фазочувствительный выпрямитель 21 поступает сигнал частоты 2ω с умножителя частоты 17 в качестве опорного, а также сигнал с датчика угла ДУβ 6. Выходной сигнал с ФЧВ2 21 пропорционален амплитуде колебаний по оси β и поступает на формирователь импульсов 22, который вырабатывает управляющие импульсы частотой 2ω на датчик момента ДМβ 8 аналогично формирователю импульсов 14 на фиг. 2.
К особенностям предложенных схем следует отнести так же принцип формирования сетки частот по оси β по сигналам с оси γ. Данное решение позволяет добиться наилучшей синхронизации измерительной оси β и оси возбуждения γ и позволяет добиться наилучшей настройки прибора с помощью системы подстройки собственной частоты по измерительной оси.
Расчетно-теоретические исследования и моделирование, проведенные на НПК "Вектор", подтвердили высокую техническую эффективность предложенного устройства. Так, относительная величина снижения влияния ранее указанных "геометрических" несовершенств выполнения чувствительного элемента на точность гироскопа составляет примерно 3 - 4 порядка по сравнению с прибором, выбранным в качестве прототипа.
Источники информации:
1. Патент США N 4598585, МПК G 01 С 15/02, 1986.
2. Патент США N 5203208, МПК G 01 С 9/04, 1993.
3. Патент РФ N 2018133, МПК G 01 С 15/08, 1992.
4. Патент РФ N 2085849, МПК G 01 С 19/56, 1995.
5. Отчет НПК "Вектор" УШТА. Э - 099.13, 1999.
6. Патент РФ N2117916 МПК G 01 С 19/56 1997.
| название | год | авторы | номер документа |
|---|---|---|---|
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП (ЕГО ВАРИАНТЫ) | 1995 |
|
RU2085849C1 |
| ДАТЧИК УГЛОВОГО И ЛИНЕЙНОГО ПОЛОЖЕНИЯ | 1997 |
|
RU2117916C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП (ЕГО ВАРИАНТЫ) | 1995 |
|
RU2085848C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2006 |
|
RU2319929C1 |
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 1996 |
|
RU2110768C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2016 |
|
RU2656119C2 |
| ИЗМЕРИТЕЛЬ РАССТРОЙКИ СВЧ-РЕЗОНАТОРА | 1991 |
|
RU2014623C1 |
| ДАТЧИК ДАВЛЕНИЯ | 1998 |
|
RU2147119C1 |
| ИНТЕГРИРУЮЩИЙ МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП | 2005 |
|
RU2296300C1 |
| МИКРОМЕХАНИЧЕСКИЙ ГИРОСКОП | 2004 |
|
RU2279634C2 |
Гироскоп предназначен для использования в системах управления подвижными объектами в качестве измерителей и индикаторов движения объектов. В корпусе размещен инерционный элемент, расположенный в рамке, соединенной с корпусом и инерционным элементом посредством двух пар упругих элементов. Датчики угла и датчики момента расположены по осям рамки и инерционного элемента. Для повышения точности введен блок стабилизации колебаний по измерительной оси на двойной частоте по отношению к частоте возбуждения. Вибрирующий инерционный элемент имеет форму стержня, ось которого параллельна измерительной оси. В качестве блока возбуждения колебаний инерционного элемента использован автогенератор. 4 з. п. ф-лы, 3 ил.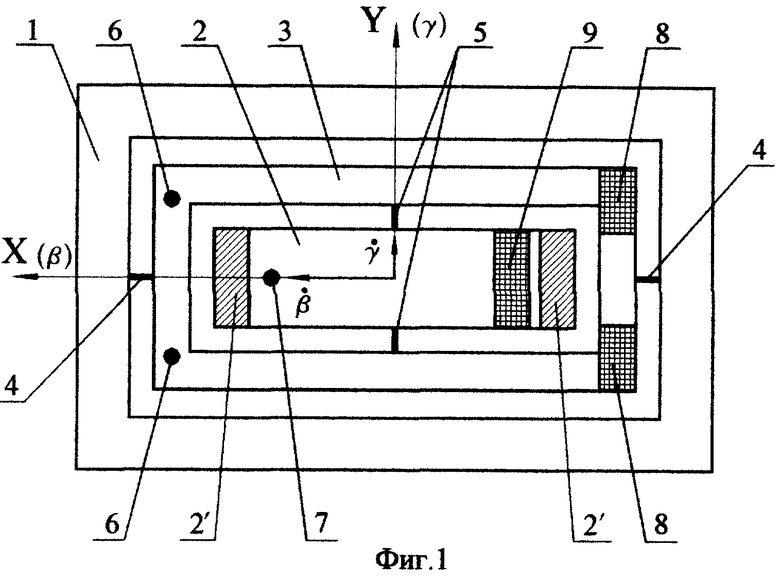
| МИКРОМЕХАНИЧЕСКИЙ ВИБРАЦИОННЫЙ ГИРОСКОП (ЕГО ВАРИАНТЫ) | 1995 |
|
RU2085849C1 |
| ДАТЧИК ИНЕРЦИАЛЬНОЙ ПЕРВИЧНОЙ ИНФОРМАЦИИ | 1992 |
|
RU2119645C1 |
| EP 0880011 A2, 25.11.1998 | |||
| US 6023972, 15.02.2000 | |||
| US 5920012, 06.07.1999. | |||
