Область техники
Изобретение относится к области связи и, более конкретно, к методам восстановления данных в присутствии шумов и помех в приемнике в системе беспроводной связи.
Предшествующий уровень техники
В системе беспроводной связи передатчик в типовом случае кодирует, выполняет перемежение и модулирует (отображает на символы) данные трафика для получения символов данных, которые являются символами модуляции для данных. В когерентной системе передатчик мультиплексирует символы пилот-сигнала с символами данных, обрабатывает мультиплексированные символы пилот-сигнала и данных для генерации модулированного сигнала и передает сигнал по беспроводному каналу. Канал искажает передаваемый сигнал за счет отклика канала и дополнительно снижает качество сигнала шумами и помехами.
Приемник принимает переданный сигнал и обрабатывает принятый сигнал для получения принятых символов. В когерентной системе приемник в типовом случае оценивает отклик канала с помощью принятых символов пилот-сигнала и выполняет когерентную демодуляцию/детектирование принятых символов данных с использованием оценок отклика канала для получения восстановленных символов данных, которые являются оценками символов данных, переданных передатчиком. Приемник затем выполняет обращенное отображение символов, обращенное перемежение и декодирует восстановленные символы данных для получения декодированных данных, которые являются оценкой данных трафика, переданных передатчиком.
В типовой когерентной беспроводной системе приемник обрабатывает принятые символы пилот-сигнала один раз для получения оценок отклика канала, а также выполняет когерентную демодуляцию над принятыми символами данных для получения восстановленных символов данных. Затем приемник выполняет обращенное отображение символов, обращенное перемежение и декодирование над восстановленными символами в соответствии со схемами кодирования и модуляции, использованными для данных трафика. Шумы и помехи ухудшают качество восстановленных символов данных и влияют на надежность декодированных данных. Поэтому в технике существует потребность в методах восстановления данных в присутствии шумов и помех в приемнике в системе беспроводной связи.
Сущность изобретения
Предложены итеративные способы обработки в приемнике, которые учитывают помехи и обеспечивают улучшенные рабочие показатели. Эти способы могут быть использованы в различных системах беспроводной связи и могут быть реализованы различным образом.
В соответствии со схемой итеративного оценивания канала и помех и декодирования выполняется итеративное оценивание усиления канала и помех. Согласно этой схеме сначала получают априорную информацию об усилении канала и помехе (например, на основе принятых символов пилот-сигнала). Упреждающая информация для кодовых битов, соответствующих принятым символам данных, выводится на основе принятых символов данных и априорной информации. (Каждый символ данных получают на основе В кодовых битов, где В зависит от схемы модуляции, используемой для символа данных). Эта упреждающая информация затем декодируется для получения информации обратной связи для кодовых битов, соответствующих принятым символам данных. На основе информации обратной связи для кодовых битов, соответствующих принятому символу данных, получают апостериорную информацию для усиления канала и помех для каждого принятого символа данных. Эта апостериорная информация для всех принятых символов данных и априорная информация объединяются для получения обновленной информации для усиления канала и помехи для каждого принятого символа данных. Процесс может повторяться для некоторого числа итераций, при этом обновленная информация для усиления канала и помехи используется для получения упреждающей информации для каждой последующей итерации.
Априорная информация, апостериорная информация и обновленная информация для усиления канала и помехи могут быть представлены совместными распределениями вероятностей для усиления канала и помехи. Упреждающая информация и информация обратной связи могут быть представлены логарифмическими отношениями правдоподобия (LLR) для кодовых битов принятых символов данных. В другой схеме итеративной обработки в приемнике помеха оценивается однократно и используется в итерационном процессе оценивания канала и декодирования. Это может снизить вычислительную сложность для различных этапов итерационного процесса.
Для всех схем итерационной обработки в приемнике сложность обработки может быть снижена за счет оценивания амплитуд для канала неитерационным способом (например, на основе принятых символов пилот-сигнала и символов данных) и оценивания только фазы канала итерационным способом. Для дополнительного снижения сложности, при использовании М-ичной фазовой манипуляции (M-PSK), фаза канала может оцениваться в диапазоне от 0 до 2π/М (например, на основе принятых символов данных). В этом случае априорная информация, апостериорная информация и обновленная информация для усиления канала могут содержать М компонентов для М различных значений фазы канала, где М может быть намного меньше, чем число компонентов, необходимых при отсутствии первоначальной оценки фазы канала.
Различные аспекты и варианты осуществления изобретения описаны более подробно ниже.
Краткое описание чертежей
Признаки и сущность настоящего изобретения поясняются в последующем детальном описании, иллюстрируемом чертежами, на которых одинаковыми ссылочными позициями на чертежах обозначены соответствующие элементы, где показано следующее:
фиг.1 - схема передачи для системы со скачкообразным изменением частоты;
фиг.2 - передатчик в системе со скачкообразным изменением частоты;
фиг.3 - приемник со скачкообразным изменением частоты;
фиг.4 - граф Таннера, иллюстрирующий итерационное оценивание канала и помех и декодирование;
фиг.5 - процесс выполнения итерационного оценивания канала и помех и декодирования;
фиг.6 - процесс выполнения итерационного оценивания канала и декодирования с использованием оценки помехи;
фиг.7А и 7В - два способа оценивания фазы канала на основе принятых символов данных и
фиг.8 - процесс выполнения итерационного оценивания канала и декодирования с использованием оценки фазы канала, полученной из принятых символов данных.
Детальное описание
Термин «примерный» используется в настоящем описании в смысле «служащий в качестве примера, экземпляра, иллюстрации». Любой вариант осуществления, описанный ниже как «примерный», не обязательно должен толковаться как преимущественный или предпочтительный по сравнению с другими вариантами осуществления.
Описанные итерационные способы обработки в приемнике могут использоваться для различных систем беспроводной связи, которые испытывают воздействие помех. Для наглядности, эти способы описаны для системы связи со скачкообразным изменением частоты, в которой данные передаются на различных частотных поддиапазонах в различных временных интервалах, которые также называются «периодами скачкообразного изменения». При скачкообразном изменении частоты передача данных скачком переходит из поддиапазона в поддиапазон псевдослучайным образом. Это скачкообразное изменение обеспечивает частотное разнесение и обеспечивает более высокую устойчивость передачи данных по отношению к искажающим эффектам на трассе распространения сигнала, таким как узкополосные взаимные помехи, подавление, замирание и т.д.
Поддиапазоны в системе со скачкообразным изменением частоты могут быть обеспечены путем мультиплексирования с ортогональным частотным разделением (OFDM), с помощью других методов модуляции с множеством несущих или некоторых других методов. OFDM представляет собой метод модуляции, который эффективно подразделяет всю ширину полосы системы на множество (NF) ортогональных поддиапазонов. Каждый поддиапазон связан с соответствующей поднесущей, которая может модулироваться данными. Поддиапазоны также обычно упоминаются как тональные сигналы, поднесущие, элементы разрешения, частотные каналы.
Система со скачкообразным изменением частоты может использоваться во множестве сотовых ячеек, где сотовая ячейка обычно относится к базовой станции и/или ее области покрытия. Каждая сотовая ячейка может поддерживать одновременно множество пользователей. Для заданной сотовой ячейки данные для каждого пользователя в сотовой ячейке могут передаваться с использованием конкретной последовательности скачкообразного изменения частоты (FH), выделенной пользователю. FH-последовательность указывает конкретный поддиапазон, который должен использоваться для передачи данных в каждом периоде скачкообразного изменения. Множество передач данных для множества пользователей могут посылаться одновременно с использованием различных FH-последовательностей. Эти FH-последовательности определяются как ортогональные друг другу, так что только одна передача данных использует каждый поддиапазон в каждом периоде скачкообразного изменения. При использовании ортогональных FH-последовательностей передачи данных для множества пользователей в одной и той же сотовой ячейке не создают взаимных помех друг другу при использовании в то же время преимуществ, обеспечиваемых частотным разнесением. Однако эти пользователи в типовом случае испытывают взаимные помехи, создаваемые между сотовыми ячейками, от пользователей в других сотовых ячейках. Взаимные помехи, воспринимаемые данным пользователем, могут изменяться от скачка к скачку частоты, поскольку в разных периодах скачкообразного изменения может проявляться влияние от различных создающих помехи пользователей.
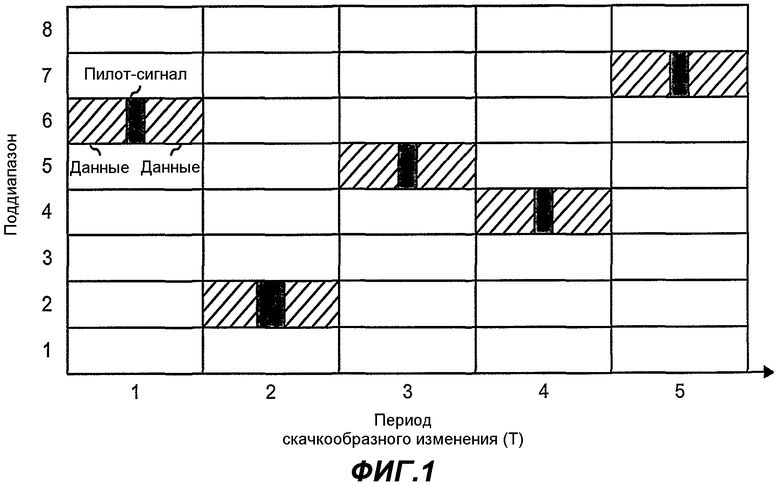
На фиг.1 показана приведенная для примера схема 100 передачи для системы связи со скачкообразным изменением частоты. На фиг.1 показана передача пилот-сигнала данных в частотно-временной плоскости, где вертикальная ось представляет частоту, а горизонтальная ось представляет время. В этом примере, NF = 8, и восемь поддиапазонов обозначены индексами от 1 до 8. Вплоть до восьми каналов трафика может быть определено, причем каждый канал трафика использует один из восьми поддиапазонов в каждом периоде скачкообразного изменения. Период скачкообразного изменения представляет собой интервал времени, выделенный на каждый поддиапазон, и может определяться как равный длительности NH OFDM-символов, где NH ≥ 1.
Каждый канал трафика связан с отличающейся FH-последовательностью. FH-последовательности для всех каналов трафика могут генерироваться с использованием FH-функции f(k,T), где k обозначает номер канала трафика и T обозначает системное время, которое задано в единицах периодов скачкообразного изменения. NF различных FH-последовательностей могут генерироваться с NF различными значениями k для FH-функции f(k,T). FH-последовательность для каждого канала трафика указывает конкретный поддиапазон, который должен использоваться для этого канала трафика в каждом периоде скачкообразного изменения. Для наглядности, на фиг.1 показаны поддиапазоны, используемые для одного канала трафика. Этот канал трафика скачкообразно переходит от одного поддиапазона к другому поддиапазону псевдослучайным образом, как определено его FH-последовательностью.
В случае схемы 100 передачи NP символов пилот-сигнала (обозначены затемненными прямоугольниками) передаются как мультиплексированные с временным разделением (TDM) вместе с ND символами данных (обозначены заштрихованными прямоугольниками) в каждом периоде скачкообразного изменения. В общем случае, NP ≥ 1, ND ≥ 1 и NP + ND = NH. NP в типовом случае составляет достаточное число символов пилот-сигнала, чтобы обеспечить возможность приемнику адекватно оценить отклик канала в каждом периоде скачкообразного изменения.
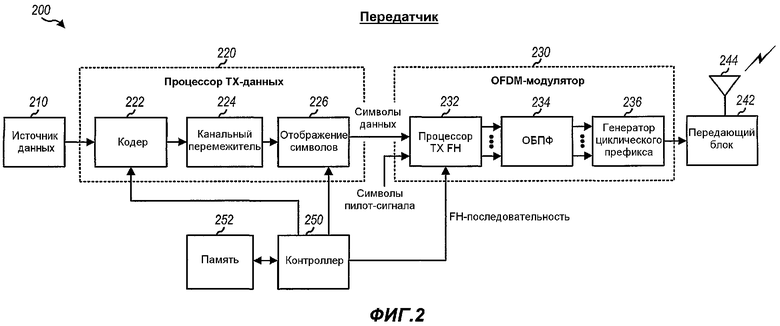
На фиг.2 показана блок-схема передатчика 200 в системе со скачкообразным изменением частоты. Процессор 220 передаваемых (ТХ) данных принимает данные трафика от источника 210 данных и данные управления от контроллера 250. В процессоре 220 ТХ-данных кодер 222 кодирует данные трафика и данные управления в соответствии с выбранной схемой кодирования (например, с использованием сверточного кода, кода контроля четности низкой плотности (LDPC), турбокода, блочного кода и т.д.) для получения кодированных данных. Кодирование повышает надежность передачи данных. Канальный перемежитель 224 перемежает (то есть переупорядочивает) кодированные данные для получения перемеженных данных. Перемежение обеспечивает разнесение для кодированных данных. Блок 226 символьного отображения затем отображает на символы (то есть модулирует) перемеженные данные в соответствии с выбранной схемой модуляции для получения символов данных. Выбранная схема модуляции может представлять собой M-PSK (М-позиционная фазовая манипуляция) (например, BPSK (двухпозиционная фазовая манипуляция) или QPSK (четвертичная фазовая манипуляция)), M-QAM (M-ичная квадратурная амплитудная модуляция) или некоторую другую схему модуляции. Символьное отображение может выполняться путем (1) группирования наборов из В перемеженных символов для формирования B-битовых двоичных значений, где B ≥ 1 и 2B = M, и (2) отображения каждого B-битового двоичного значения на точку в сигнальной совокупности, соответствующей выбранной схеме модуляции. Каждая отображенная сигнальная точка представляет собой комплексное значение и соответствует символу модуляции (т.е. символу данных). Блок 226 символьного отображения выдает поток символов данных на OFDM-модулятор 230.
OFDM-модулятор 230 выполняет модуляцию скачкообразного изменения частоты и OFDM для символов данных и пилот-сигнала. В OFDM-модуляторе 230, TX-FH-процессор 232 принимает символы данных и пилот-сигнала и обеспечивает эти символы в надлежащем поддиапазоне (и в надлежащем порядке) в каждом периоде скачкообразного изменения, как указано FH-последовательностью с контроллера 250. Символы данных и пилот-сигналов динамически скачкообразно переходят из поддиапазона в поддиапазон псевдослучайным образом, как определено FH-последовательностью. TX-FH-процессор 232 обеспечивает NF символов передачи для NF поддиапазонов для каждого периода OFDM-символа. Эти NF символов передачи состоят из одного символа данных/пилот-сигнала для каждого поддиапазона, используемого для передачи данных/пилот-сигнала, и нулевого значения сигнала для каждого поддиапазона, не используемого для передачи данных/пилот-сигнала.
Блок 234 обратного быстрого преобразования Фурье (ОБПФ) получает NF символов передачи для каждого периода OFDM-символа, выполняет NF-точечное обратное быстрое преобразование Фурье для NF символов передачи и обеспечивает соответствующий преобразованный символ, который содержит NF кодовых элементов во временной области. Каждый кодовый элемент представляет собой комплексное значение, которое должно передаваться в одном периоде кодового элемента, где частота следования кодовых элементов в типовом случае определяется шириной полосы системы. Генератор 236 циклического префикса принимает NF кодовых элементов для каждого преобразованного символа и повторяет часть преобразованного символа для формирования OFDM-символа, который содержит NF + Ncp кодовых элементов, где Ncp - число повторяемых кодовых элементов. Повторяемая часть часто упоминается как циклический префикс и используется для противодействия межсимвольным помехам (ISI), обусловленным дисперсией беспроводного канала (то есть беспроводного канала с разбросом временных задержек). Период OFDM-символа представляет собой длительность одного OFDM-символа, который состоит из периодов NF + Ncp кодовых элементов. Генератор 236 циклического префикса обеспечивает поток OFDM-символов. Передающий блок (TMTR) 242 осуществляет преобразование потока (то есть преобразует в аналоговые сигналы, фильтрует, усиливает и преобразует с повышением частоты) OFDM-символов для генерации модулированного сигнала, который передается от антенны 244.
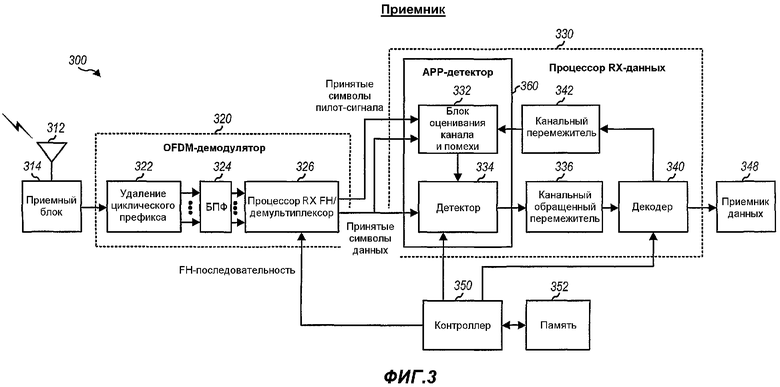
На фиг.3 показана блок-схема приемника 300 в системе со скачкообразным изменением частоты. Антенна 312 принимает модулированный сигнал, переданный передатчиком 200, и подает принятый сигнал в приемный блок (RCVR) 314. Приемный блок 314 осуществляет преобразование (преобразует с понижением частоты фильтрует и усиливает) принятый сигнал и затем оцифровывает преобразованный сигнал для получения потока выборок, которые подаются на OFDM-демодулятор 230.
В OFDM-демодуляторе 230 блок 322 удаления циклического префикса принимает поток символов, удаляет циклический префикс, присоединенный к каждому принятому OFDM-символу, и обеспечивает соответствующий принятый преобразованный символ, который содержит NF выборок. Блок БПФ 324 выполняет NF-точечное быстрое преобразование Фурье над NF выборками для каждого принятого преобразованного символа для получения NF принятых символов для NF поддиапазонов для данного преобразованного символа. RX FH-процессор/демультиплексор 326 получает NF принятых символов для каждого периода OFDM-символа и обеспечивает принятый символ из надлежащего поддиапазона в качестве принятого символа данных/пилот-сигнала для данного периода OFDM-символа. Надлежащий поддиапазон определяется FH-последовательностью с контроллера 350. FH-последовательность, используемая для RX FH-процессора 326 в приемнике 300, является той же, что и FH-последовательность, используемая в TX FH-процессоре 232 в передатчике 200, и синхронизирована с ней. RX FH-процессор 326 работает согласованно с TX FH-процессором 232 и выдает поток принятых символов данных/пилот-сигналов из надлежащих поддиапазонов в процессор 330 принятых (RX) данных.
Процессор 330 RX данных выполняет итерационную обработку приемника над принятыми символов данных и пилот-сигналов для получения декодированных данных. Для варианта осуществления, показанного на фиг.3, процессор 330 RX данных включает в себя блок 332 оценивания канала и помех, детектор 334, канальный обращенный перемежитель 336, декодер 340 и канальный перемежитель 342, которые работают, как описано ниже. Процессор 330 RX данных выдает декодированные данные в приемник 348 данных и/или контроллер 350.
Контроллеры 250 и 350 управляют работой передатчика 200 и приемника 300, соответственно, блоки 252 и 352 памяти обеспечивают хранение программных кодов и данных, используемых контроллерами 250 и 350, соответственно.
Модель для системы со скачкообразным изменением частоты может быть выражена следующим образом:
где sk(m) - символ данных или пилот-сигнала, передаваемый в поддиапазоне k в периоде m символа;
hk(m) - комплексное усиление канала для поддиапазона k в периоде m символа, которое может быть разложено на амплитуду ak(m) канала и фазу θk(m) канала;
rk(m) - принятый символ данных или пилот-сигнала в поддиапазоне k в периоде m символа; и
nk(m) - шум и помеха, принятые в поддиапазоне k в периоде m символа.
Для простоты предполагается, что амплитуда канала ak(m)= |hk(m)| известна в приемнике, и что необходимо оценивать только фазу θk(m) канала. Для схемы модуляции с постоянной энергией, такой как M-PSK, амплитуда символов данных и пилот-сигнала, принятых в каждом периоде скачкообразного изменения, может быть усреднена для получения приемлемо точной оценки амплитуды ak(m) канала для данного периода скачкообразного изменения. Таким образом, в последующем описании усиление канала может быть в достаточной степени охарактеризовано только фазой канала. (Однако диаграммы показывают более точный случай, когда усиление канала может быть комплексной величиной с неизвестной амплитудой и фазой.)
Приемник может использовать неитерационную или итерационную обработку приемника для восстановления переданных данных. Для неитерационной схемы отклик канала оценивается на основе принятых символов пилот-сигнала, и принятые символы rk(m) пилот-сигнала когерентно демодулируются или детектируются с использованием оценки отклика канала, чтобы получить восстановленные символы  , которые являются оценками переданных символов sk(m) данных. Детектирование выполняется однократно для неитерационной схемы. Восстановленные символы данных затем обращенно перемежаются и декодируются для получения декодированных данных. Для итерационной схемы оценивание канала, детектирование и декодирование выполняются для множества итераций. Итерационная схема использует исправляющую способность схемы кодирования для обеспечения улучшенных рабочих показателей. Это достигается итерационным прохождением информации через блок оценки канала, детектор и декодер для множества итераций, как описано ниже.
, которые являются оценками переданных символов sk(m) данных. Детектирование выполняется однократно для неитерационной схемы. Восстановленные символы данных затем обращенно перемежаются и декодируются для получения декодированных данных. Для итерационной схемы оценивание канала, детектирование и декодирование выполняются для множества итераций. Итерационная схема использует исправляющую способность схемы кодирования для обеспечения улучшенных рабочих показателей. Это достигается итерационным прохождением информации через блок оценки канала, детектор и декодер для множества итераций, как описано ниже.
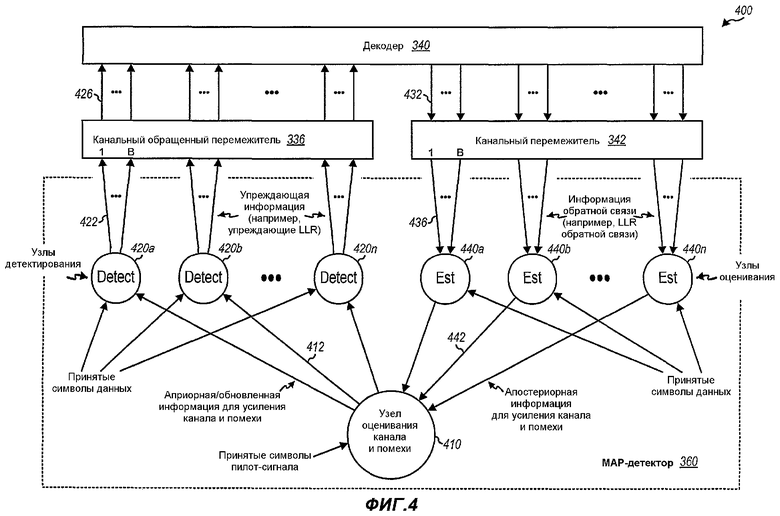
На фиг.4 показан граф Таннера 400, который графически иллюстрирует итерационную схему оценивания канала и помехи и декодирования. Итерационная обработка приемника выполняется над блоком символов данных, который, в общем случае, может содержать любое количество символов данных. Для ясности итерационная обработка приемника описана ниже для блока из ND принятых символов данных для одного периода скачкообразного изменения. ND принятых символов данных образованы NВ кодовыми битами, где NB = B·ND.
Граф Таннера 400 включает в себя узел 410 оценивания канала и помехи, ND узлов детектирования, от 420а до 420n, для ND символов данных в блоке, канальный обращенный перемежитель 336, канальный перемежитель 342, декодер 340 и ND узлов оценивания, от 440а до 440n, для ND символов данных. Узел 410 связан с каждым узлом 420 детектирования через соответствующую связь 412 и с каждым узлом 440 через соответствующую связь 442. Каждая из связей 412 и 442 переносит информацию об усилении канала и помехе для символа данных, ассоциированного с данной связью. Каждый узел 420 детектирования связан с канальным обращенным перемежителем 336 через В связей 422, и каждый узел 440 оценивания связан с канальным перемежителем 342 через В связей 436. Декодер 340 связан с канальным обращенным перемежителем 336 через NB связей 426, и с канальным перемежителем 342 через NB связей 432. Каждая из связей 422, 426, 432 и 436 переносит информацию (в направлении, указанном связью) для кодового бита, ассоциированного с этой связью. Информация для каждого кодового бита в типовом случае имеет форму логарифмического отношения правдоподобия (LLR), которое указывает вероятность кодового бита, равного «1» или «0».
Для первой итерации узел 410 получает оценки усиления канала на основе принятых символов пилот-сигнала. Узел 410 оценивает только фазу канала, если амплитуда канала известна. Узел 410 также оценивает помеху, воспринимаемую принятыми символами данных, на основе принятых символов пилот-сигнала. Узел 410 обеспечивает априорную информацию для фазы канала и помехи для каждого узла 420 детектирования через связь 412.
Каждый узел 420 детектирования получает соответствующий принятый символ rk(n) данных и априорную информацию о фазе канала и помехе от узла 410. Каждый узел 420 детектирования вычисляет LLR для каждого из В кодовых битов, которые образуют символ данных, на основе принятого символа rk(n) данных и априорной информации о фазе канала и помехе. Каждый узел 420 детектирования выдает В «упреждающих» значений LLR для В кодовых битов на канальный обращенный перемежитель 336 через связи 422. Канальный обращенный перемежитель 336 выполняет обращенное перемежение упреждающих значений LLR для всех NB кодовых битов способом, комплементарным перемежению, выполненному в передатчике, и выдает обращенно перемеженные упреждающие значения LLR на декодер 340.
Декодер 340 декодирует обращенно перемеженные упреждающие значения LLR для NB кодовых битов в соответствии со схемой кодирования, использованной передатчиком. Например, декодер 340 может реализовать (1) алгоритм максимума апостериорной вероятности (МАР) или алгоритм мягкого решения Витерби (SOV), если передатчик использует сверточный код, или (2) турбодекодер или декодер LDPC, если передатчик использует турбокод или код LDPC. Декодер 340 выдает значения LLR обратной связи для NB кодовых битов, которые являются обновленными значениями LLR для этих битов, на канальный перемежитель 342 посредством связей 432. Канальный перемежитель 342 перемежает полученные значения LLR обратной связи тем же способом, что и перемежение, выполняемое в передатчике, и выдает перемеженные значения LLR обратной связи на узлы 440 оценивания посредством связей 436.
Каждый узел 440 оценивания получает соответствующие принятые символы rk(n) данных и перемеженные значения LLR обратной связи для В кодовых битов данного принятого символа данных от канального перемежителя 342. Каждый узел 440 оценивания выводит апостериорную информацию для фазы канала и помехи для своего символа данных на основе принятого символа rk(n) данных и значений LLR обратной связи и выдает эту апостериорную информацию на узел 410 посредством связи 442.
Узел 410 объединяет априорную информацию для усиления канала и помехи и апостериорную информацию для фазы канала и помехи от узлов 440 оценивания для получения обновленной информации для усиления канала и помехи для каждого принятого символа данных. Узел 410 выдает обновленную информацию для фазы канала и помехи на каждый узел 420 детектирования. Детектирование и декодирование для второй итерации затем выполняются аналогичным методом, как и для первой итерации, но только с обновленной информацией для усиления канала и помехи.
Согласно фиг.4 каждый узел 420 детектирования выводит и выдает упреждающую информацию для кодовых битов, соответствующих конкретному принятому символу данных, и декодер 340 выводит и выдает информацию обратной связи для каждого принятого символа данных. Упреждающая информация и информация обратной связи в типовом случае задаются в форме LLR, но могут задаваться и в другой форме.
На фиг.5 показана блок-схема процесса 500 для выполнения итерационного оценивания канала и помехи и декодирования.
На этапе 510 априорная информация для фазы канала и помехи получается на основе принятых символов пилот-сигнала. Этап 510 выполняется узлом 410 на фиг.4. Вновь предполагается, что амплитуда канала известна, и оценивается только фаза канала. Нормированное состояние канала для символов пилот-сигнала может быть выражено следующим образом:
где усиление а канала и фаза θ канала предполагаются постоянными для всех ND символов данных в блоке, и шум и помеха n предполагаются комплексной гауссовской случайной переменной с нулевым средним и дисперсией N0.
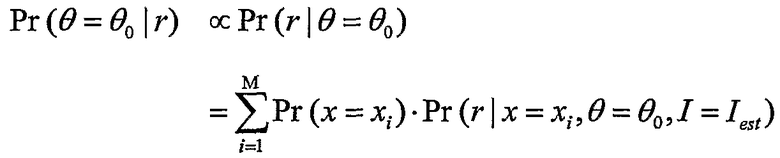
Априорная информация для фазы канала и помехи может быть задана как совместное распределение вероятности фазы θ канала и мощности I помехи. Для простоты фаза θ канала может быть квантована по L возможным значениям и задана как целое кратное величины 2π/L. Аналогичным образом мощность I помехи может быть квантована на Q возможных значений. Совместное распределение вероятности θ и I может быть представлено как трехмерный (3-D) граф, на котором ось х представляет фазу θ канала, ось y представляет мощность I помехи и ось z представляет совместную вероятность конкретной фазы θ0 канала и конкретной мощности I0 помехи для конкретного принятого символа пилот-сигнала. Совместное распределение вероятности θ и I может быть представлено следующим образом:
где  - принятый символ пилот-сигнала и р - действительный символ пилот-сигнала;
- принятый символ пилот-сигнала и р - действительный символ пилот-сигнала;
 - совместное распределение вероятности θ и I, которое дает вероятность фазы канала, равной θ0, и мощности помехи, равной I0, при условии принятого символа пилот-сигнала
- совместное распределение вероятности θ и I, которое дает вероятность фазы канала, равной θ0, и мощности помехи, равной I0, при условии принятого символа пилот-сигнала  ;
;
 - априорное совместное распределение вероятности θ и I, которое дает вероятность фазы канала, равной θ0, и мощности помехи, равной I0;
- априорное совместное распределение вероятности θ и I, которое дает вероятность фазы канала, равной θ0, и мощности помехи, равной I0;
 - распределение вероятности (полученное на основе модели канала связи, например гауссовой), которое дает вероятность получения принятого символа пилот-сигнала
- распределение вероятности (полученное на основе модели канала связи, например гауссовой), которое дает вероятность получения принятого символа пилот-сигнала  для заданной фазы канала, равной θ0, и мощности помехи, равной I0;
для заданной фазы канала, равной θ0, и мощности помехи, равной I0;
 - вероятность получения заданного значения
- вероятность получения заданного значения  ;
;
 - априорное распределение вероятности по I, которое дает вероятность мощности помехи, равной I0.
- априорное распределение вероятности по I, которое дает вероятность мощности помехи, равной I0.
Первое выражение в уравнении (3) получено на основе правила Байеса. Второе выражение в уравнении (3) получено в предположении, что различные значения фазы θ канала являются априорно равновероятными, так что  является постоянной величиной и может быть опущена. Третье выражение в уравнении (3) получено на основе предположения, что шум и помеха являются комплексной гауссовой переменной с нулевым средним и дисперсией I0. В уравнении (3) опущен нормирующий коэффициент, который может быть вычислен путем применения ограничения, что функция распределения вероятности (pdf) интегрируется до единицы по своей области.
является постоянной величиной и может быть опущена. Третье выражение в уравнении (3) получено на основе предположения, что шум и помеха являются комплексной гауссовой переменной с нулевым средним и дисперсией I0. В уравнении (3) опущен нормирующий коэффициент, который может быть вычислен путем применения ограничения, что функция распределения вероятности (pdf) интегрируется до единицы по своей области.
Одно совместное распределение вероятности по θ и I получается для каждого принятого символа пилот-сигнала, как показано в уравнении (3). Если имеется множество принятых символов пилот-сигналов, то совместное распределение вероятности по θ и I получается для этих символов и объединяется для получения полного или составного совместного распределения вероятности по θ и I для всех принятых символов пилот-сигналов. Этап 510 обеспечивает получение одного совместного распределения вероятности по θ и I для использования всеми ND принятыми символами данных. Это совместное распределение вероятности содержит L·Q значений вероятности для L различных значений фаз канала и Q различных значений мощности помехи, что может рассматриваться как трехмерное графическое представление вероятности в зависимости от θ и I. Это совместное распределение вероятности представляет априорную информацию для фазы канала и помехи, полученную на основе принятых символов пилот-сигнала.
Вероятности для совместного распределения  могут быть выражены в логарифмической области для упрощения последующего вычисления. Это подобно использованию логарифма отношения правдоподобия (LLR) для выражения распределения вероятности одного кодового бита. Использование представления в логарифмической области позволяет избежать необходимости вычисления внешней экспоненты в третьем выражении уравнения (3).
могут быть выражены в логарифмической области для упрощения последующего вычисления. Это подобно использованию логарифма отношения правдоподобия (LLR) для выражения распределения вероятности одного кодового бита. Использование представления в логарифмической области позволяет избежать необходимости вычисления внешней экспоненты в третьем выражении уравнения (3).
Совместное распределение вероятности по θ и I получается на основе двух переменных θ и I, которые априорно независимы. Совместное распределение является, таким образом, произведением распределения по θ и распределения по I. Распределение по θ может предполагаться равномерным. Распределение по I (т.е. распределение мощности помехи) может быть получено разными способами. В одном варианте осуществления мощность помехи предполагается постоянной по Q значениям. В другом варианте осуществления мощность помехи предполагается имеющей стандартное распределение, такое как гауссово распределение или логарифмически нормальное распределение. Еще в одном варианте осуществления распределение мощности помехи выводится на основе компьютерного моделирования на сетевом уровне, эмпирических измерений или другими средствами.
На этапе 520 упреждающие LLR для В кодовых битов каждого принятого символа данных вычисляются на основе принятого символа данных и совместного распределения вероятности по θ и I для этого символа. Этап 520 выполняется каждым узлом 420 детектирования, показанным на фиг.4. Вычисление упреждающего LLR для каждого узла 420 детектирования может выполняться на двух этапах. На первом этапе апостериорное распределения по значению переданного символа данных х вычисляется на основе принятого символа данных r и совместного распределения вероятности по θ и I. Символ данных может принимать одно из М = 2В возможных значений. Это апостериорное распределение указывает вероятность для каждого из М возможных значений х при условии принятого символа данных r и совместного распределения вероятности по θ и I. Апостериорное распределение по х при условии r может быть выражено следующим образом:


где х - значение символа данных, которое может иметь М возможных значений;
 - апостериорное распределение по х при условии r, которое дает вероятность значения символа данных, равного х0, при условии принятого символа r;
- апостериорное распределение по х при условии r, которое дает вероятность значения символа данных, равного х0, при условии принятого символа r;
 - распределение, которое дает вероятность получения принятого символа данных r, при условии значения символа данных, равного х0;
- распределение, которое дает вероятность получения принятого символа данных r, при условии значения символа данных, равного х0;
 - совместное распределение θ и I, полученное из оценивания канала и помехи;
- совместное распределение θ и I, полученное из оценивания канала и помехи;
 - комплексное гауссово распределение со средним
- комплексное гауссово распределение со средним  и дисперсией
и дисперсией  .
.
Апостериорное распределение по х при условии r, т.е.  , может рассматриваться как двумерный график, который содержит М значений вероятности для М значений х, соответствующих принятому символу данных r.
, может рассматриваться как двумерный график, который содержит М значений вероятности для М значений х, соответствующих принятому символу данных r.
На втором этапе для вычисления упреждающих LLR апостериорное распределение по х для принятого символа данных «берется в пределе» для получения упреждающих LLR для В кодовых битов этого символа. Значение х символа данных определяется значениями В кодовых битов и сигнальной совокупностью, используемой для отображения кодовых битов на символы данных. Каждое из М возможных значений соответствует отличающейся комбинации значений для В кодовых битов. Упреждающее LLR для каждого кодового бита может быть вычислено как взвешенная сумма М значений вероятности для М возможных значений х, где взвешивание определяется расстоянием между символом данных в сигнальной совокупности (или символом совокупности) и принятым символом данных. Этап 520 обеспечивает В упреждающих LLR для В кодовых битов каждого принятого символа данных, или всего NB упреждающих LLR для NB кодовых битов ND символов данных, обрабатываемых итерационным методом. Упреждающие LLR представляют упреждающую информацию, выдаваемую в декодер.
На этапе 530 упреждающие LLR для кодового слова, которое содержит NB кодовых битов, декодируются для получения LLR обратной связи для NB кодовых битов. Этап 530 выполняется в декодере 340, показанном на фиг.4. Декодирование может выполняться, например, на основе алгоритмов MAP, SOV или алгоритма турбодекодирования и может выполняться для одной или более итераций. На этапе 530 обеспечивается NB LLR обратной связи для NB кодовых битов, которые представляют информацию обратной связи, обеспечиваемую декодером.
На этапе 540 апостериорное совместное распределение вероятности по θ и I вычисляется для каждого принятого символа данных на основе LLR обратной связи для В кодовых битов этого символа данных следующим образом:


где  - апостериорное совместное распределение вероятности по θ и I, которое обеспечивает вероятность фазы канала, равной θ0, и мощности помехи, равной I0, при условии принятого символа данных r;
- апостериорное совместное распределение вероятности по θ и I, которое обеспечивает вероятность фазы канала, равной θ0, и мощности помехи, равной I0, при условии принятого символа данных r;
 - произведение распределений по символу данных х, которое может быть получено на основе LLR обратной связи для В кодовых битов принятого символа данных r; и
- произведение распределений по символу данных х, которое может быть получено на основе LLR обратной связи для В кодовых битов принятого символа данных r; и
 - комплексное гауссово случайное распределение со средним и xi·a·ejθ0 дисперсией
- комплексное гауссово случайное распределение со средним и xi·a·ejθ0 дисперсией  .
.
Этап 540 выполняется каждым узлом 440 оценивания, показанным на фиг.4. Апостериорное совместное распределение вероятности по θ и I при условии r подобно априорному совместному распределению вероятности по θ и I при условии  , вычисленному на этапе 510. Однако апостериорное совместное распределение вероятности вычисляется на основе LLR обратной связи, в то время как априорное совместное распределение вероятности вычисляется на основе принятого пилот-сигнала. Этап 540 обеспечивает ND совместных распределений вероятности по θ и I для ND принятых символов данных.
, вычисленному на этапе 510. Однако апостериорное совместное распределение вероятности вычисляется на основе LLR обратной связи, в то время как априорное совместное распределение вероятности вычисляется на основе принятого пилот-сигнала. Этап 540 обеспечивает ND совместных распределений вероятности по θ и I для ND принятых символов данных.
На этапе 550 различные совместные распределения вероятностей по θ и I комбинируются для получения объединенных совместных распределений вероятностей по θ и I для ND принятых символов данных. Этап 550 выполняется узлом 410, показанным на фиг.4. Для этапа 550 ND апостериорных совместных распределений вероятностей по θ и I для ND принятых символов данных обеспечиваются из этапа 540, а одно априорное совместное распределение вероятности по θ и I обеспечивается из этапа 510. Эти ND + 1 распределений по θ и I используются для получения ND обновленных распределений по θ и I для ND принятых символов данных. Для предотвращения положительной обратной связи только внешняя информация используется для получения обновленного распределения по θ и I для каждого узла 420 детектирования. Внешняя информация для символа данных исключает информацию, получаемую на основе этого символа данных. Обновленное распределение по θ и I для каждого принятого символа данных r получается, таким образом, на основе (1) ND - 1 апостериорных распределений по θ и I, полученных для других ND - 1 принятых символов данных, и (2) априорного распределения по θ и I, полученного из принятых символов пилот-сигнала. Это вычисление (1) эффективно заменяет апостериорное распределение вероятности по θ и I, полученное для принятого символа r данных равномерным распределением, и (2) предполагает, что ND - 1 апостериорных распределений по θ и I, полученных для других ND - 1 принятых символов данных, получены на основе независимых фрагментов информации.
В качестве примера, предположим, что два распределения по θ и I, а именно  и
и  , должны объединяться, где α и β - независимые случайные переменные, когда применяется условие для θ и I. Составное распределение может быть выражено следующим образом:
, должны объединяться, где α и β - независимые случайные переменные, когда применяется условие для θ и I. Составное распределение может быть выражено следующим образом:
Вычисление согласно уравнению (6) можно расширить таким образом, чтобы можно было комбинировать любое число распределений по θ и I. Этап 550 обеспечивает ND обновленных совместных распределений вероятности по θ и I для ND принятых символов данных, которые используются узлом 420 детектирования для обновления упреждающих LLR в следующей итерации. Этап 550 завершает одну полную итерацию совместного оценивания канала и помехи и декодирования.
На этапе 560 принимается решение, завершать или нет итерационное оценивание канала и помехи и декодирование. Это решение может приниматься на основе одного или более критериев завершения. Например, критерий завершения может быть таким простым, как предварительно определенное число итераций. Если ответом на этапе 560 является «нет», то процесс возвращается к этапу 520 для обновления упреждающих LLR для кодовых битов. В противном случае процесс завершается. Этап 560 может выполняться после этапа 530, так что этапы 540 и 550 могут быть опущены для последней итерации.
Для простоты вычисление распределения вероятности в явном виде показано только для уравнения (1) и опущено для всех других уравнений. Вычисление различных описанных распределений вероятностей известно в технике.
Число значений, принимаемых фазой канала и помехой, определяет вычислительную сложность различных этапов, представленных на фиг.5. Поскольку каждое совместное распределение вероятности по θ и I содержит L·Q значений вероятности, вычислительная сложность пропорциональна как L, так и Q, которые представляют собой число квантованных значений для фазы канала и помехи, соответственно. Для поддержания приемлемой сложности помеха может быть квантована с низким разрешением с использованием малого числа значений. Метод снижения числа значений фазы канала описан ниже. Сложность также может быть снижена с использованием фазы канала и помехи иными способами, как описано ниже.
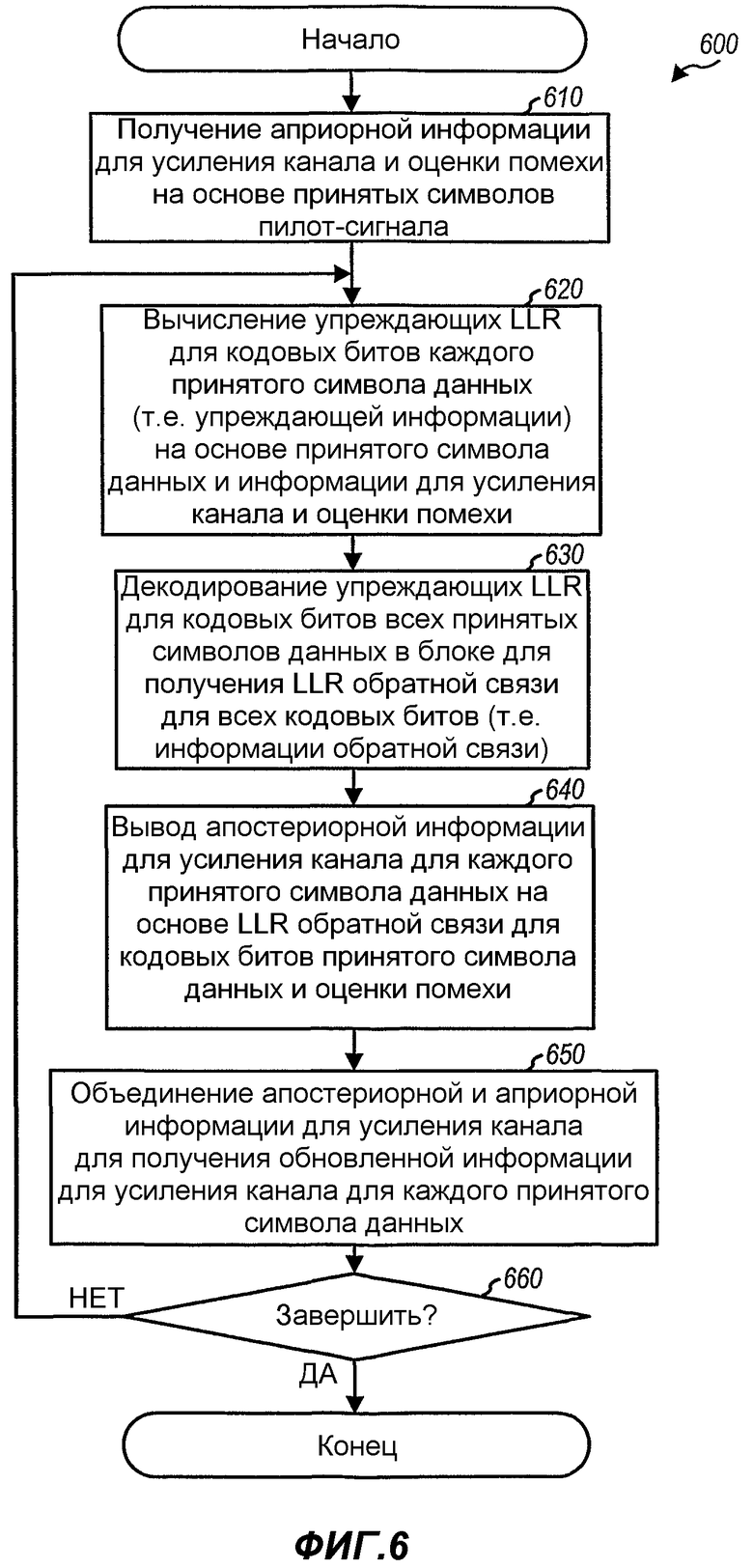
На фиг.6 показана блок-схема процесса 600 для выполнения итерационного оценивания канала и декодирования с оцениванием помехи. Для процесса 600 помеха оценивается однократно и используется в процессе итерационного оценивания канала и декодирования. Оценка помехи обновляется неитерационным образом, чтобы снизить сложность.
Первоначально оценка помехи и априорная информация для фазы канала получаются на основе принятых символов пилот-сигнала (этап 610). На этапе 610 совместное распределение вероятности по θ и I получается сначала на основе принятых символов пилот-сигнала, как описано выше для этапа 510. Затем совместное распределение вероятности по θ и I в пределе разделяется на распределение вероятности по θ и распределение вероятности по I. Значение I затем выбирается на основе распределения по I и используется в качестве оценки Iest помехи. Оценка Iest помехи может быть наибольшим значением в распределении по I, значением I, которое обеспечивает минимальную среднеквадратичную ошибку для распределения по I и т.д. Этап 610 обеспечивает распределение по θ и оценку Iest помехи. Распределение по θ, то есть  может быть выражено следующим образом:
может быть выражено следующим образом:

Множество распределений по θ могут быть получены для множества принятых символов пилот-сигналов и объединяются для получения одного распределения по θ для всех принятых символов пилот-сигналов. Уравнение (7) представляет один способ получения распределения по θ. В качестве альтернативы распределение, являющееся результатом разделения, может также использоваться непосредственно для получения распределения по θ.
Упреждающие LLR для В кодовых битов каждого принятого символа данных затем вычисляются на основе принятых символов данных, априорной информации для фазы канала и оценки помехи (этап 620). Этап 620 может выполняться на двух этапах, подобно тому, как это описано выше для этапа 520 на фиг.5. На первом этапе апостериорное распределение по х при условии r, т.е.  , вычисляется следующим образом:
, вычисляется следующим образом:
На втором этапе распределение по х для каждого принятого символа данных разделяется для получения упреждающих LLR для В кодовых битов принятого символа данных.
Упреждающие LLR для всех NB кодовых битов затем декодируются для получения LLR обратной связи для кодовых битов (этап 630). Апостериорная информация для фазы канала затем получается для каждого принятого символа данных на основе LLR обратной связи для В кодовых битов данного символа и оценки помехи (этап 640). Апостериорное распределение по θ для каждого принятого символа данных может быть выражено следующим образом:
Апостериорная информация для фазы канала для ND принятых символов данных и априорная информация для фазы канала затем объединяются для получения обновленной информации для фазы канала для каждого принятого символа данных (этап 650). В частности, обновленное распределение по θ вычисляется для каждого принятого символа данных на основе ND - 1 апостериорных распределений по θ для других ND - 1 принятых символов данных и априорного распределения, полученного из принятых символов пилот-сигнала.
Затем определяется, следует ли завершить итерационное оценивание канала и декодирование (этап 660). Если ответом является «нет», то процесс возвращается к этапу 620 для обновления упреждающих LLR для В кодовых битов каждого принятого символа данных на основе принятого символа данных, обновленного распределения по θ и оценки Iest помехи, как показано в уравнении (8). В противном случае процесс завершается. Вновь этап 660 может быть выполнен после этапа 630.
Итерационное оценивание канала и декодирование с использованием оценки помехи также могут выполняться другими методами, и это также входит в объем изобретения. Например, итерационная процедура может начаться с вычисления совместного распределения вероятности по θ и I для каждого принятого символа данных с LLR обратной связи для символа, установленными в нуль. Принятый символ данных может обеспечивать информацию для θ по модулю 2π/М, даже если никакая информация не доступна о переданных символах данных. Эта информация для θ по модулю 2π/М может затем дать в результате нетривиальную информацию о помехе. Совместное распределение вероятности по θ и I для ND принятых символов данных затем объединяется с априорным совместным распределением по θ и I, полученным из принятых символов пилот-сигнала. Обновленное совместное распределение вероятности по θ и I для каждого принятого символа данных затем разделяется для получения распределения по θ и распределения по I. Значение I затем выбирается на основе распределения по I и используется как оценка Iest помехи. Распределение по θ для каждого принятого символа данных и оценка Iest помехи затем используются для вычисления упреждающих LLR для принятого символа данных, как описано выше.
Как отмечено выше, одним фактором, который влияет на вычислительную сложность схемы, которая итерационным методом обновляет информацию о фазе канала, является число значений, на которое квантована фаза θ канала (то есть значение для L). Для модуляции M-PSK фаза θ канала может оцениваться до значения в пределах диапазона от нуля до 2π/М с использованием неитерационной оценки, основанной на данных. Описанный выше метод для получения распределения по θ для каждого принятого символа данных с LLR обратной связи, установленными в нуль, является примером оценивания на основе данных, что является неитерационным методом, поскольку выходной результат кода не используется для оценки. Фаза канала может тогда квантоваться на М различных значений (вместо L значений), что существенно снижает вычислительную сложность, если М намного меньше, чем L. Различные методы могут использоваться для оценивания фазы канала на основе принятых символов данных. Два иллюстративных метода описаны ниже.
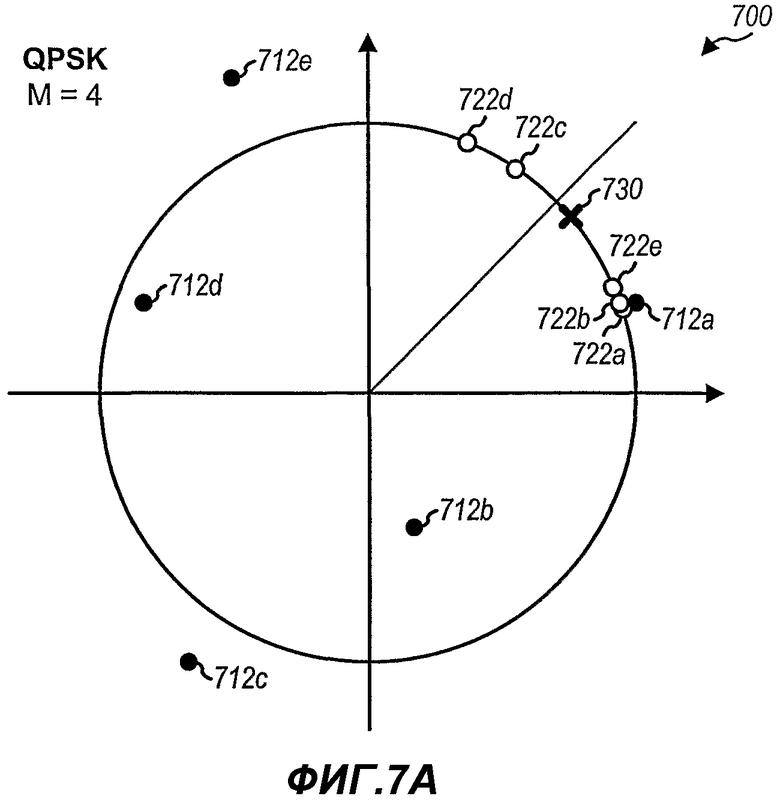
Фиг.7А иллюстрирует оценивание фазы θ канала на основе фаз принятых символов данных. В этом примере используется модуляция QPSK, и пять принятых символов данных представлены жирными точками 712а-712е в сигнальной совокупности 700 QPSK. Каждый принятый символ данных имеет фазу, которая определяется модуляцией символа данных, фазой θ канала, шумом и помехой. В этом методе сначала определяется фаза каждого принятого сигнала. Затем для фазы каждого принятого символа данных выполняется операция по модулю 2π/М, чтобы эффективно устранить модуляцию символа данных и преобразовать символ данных в символ пилот-сигнала. Фазы по модулю 2π/М для пяти принятых символов данных графически представлены кружками 722а-722е в сигнальной совокупности 700 QPSK. Фазы по модулю 2π/М для пяти символов данных затем усредняются для получения оценки фазы θest канала, которая обозначена меткой «х» 730.
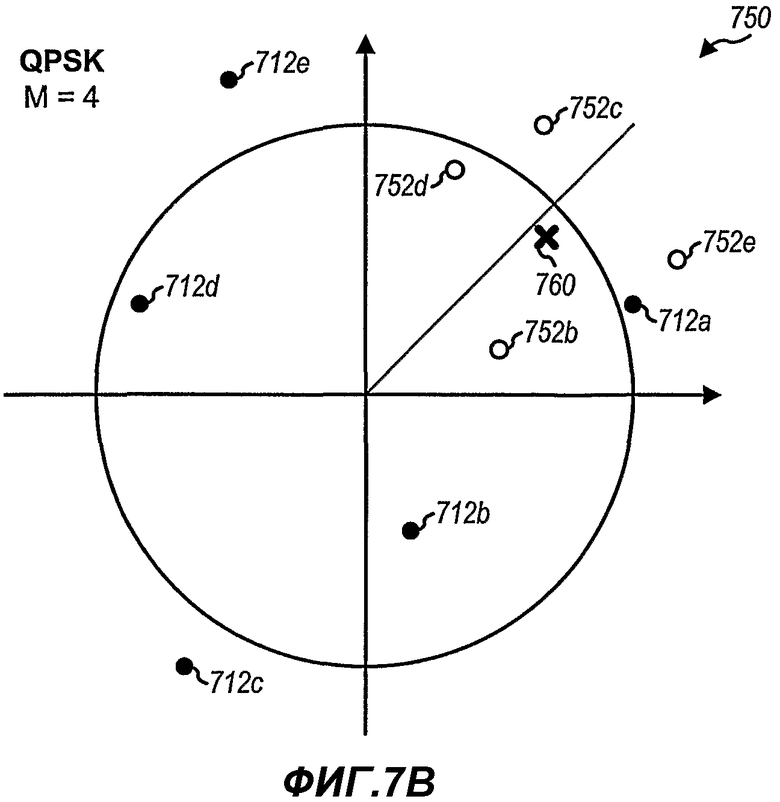
На фиг.7В показано оценивание фазы канала на основе комплексных значений принятых символов данных. Для этого метода также представлены пять принятых символов данных в виде жирных точек 712а-712е в сигнальной совокупности 700 QPSK. Каждый принятый символ данных поворачивается на целое кратное значения 2π/М (т.е. на 2π·i/М, где i - целое число, равное нулю или большее, чем нуль), так что фаза повернутого принятого символа данных находится в диапазоне от нуля до 2π/М. Принятый символ данных 712а повернут на нуль градусов. Принятые символы данных 712b-712e повернуты на соответствующие величины и представлены кружками 752b-752e, соответственно, в сигнальной совокупности 750. Пять повернутых принятых символов данных усредняются для получения усредненного принятого символа данных, который представлен меткой «х» 760. Фаза θ канала оценивается как фаза усредненного принятого символа данных. Этот метод использует как амплитуду, так и фазу принятых символов данных для вычисления оценки фазы θest канала, в то время как метод, иллюстрируемый на фиг.7А, использует только фазу принятых символов данных.
Фаза канала может оцениваться и другими способами, что также входит в объем настоящего изобретения. Например, фаза канала может оцениваться с использованием методов, описанных выше, для получения распределения по θ для каждого принятого символа данных с LLR обратной связи, установленными на нуль. В качестве другого примера фаза каждого принятого символа данных может умножаться на М и затем усредняться.
Если фаза канала по модулю 2π/М может оцениваться надежным образом, то фаза канала известна с точностью до диапазона от нуля до 2π/М. Единственная неопределенность состоит в том, к какому из М возможных диапазонов принадлежит фаза канала. Итерационная схема может затем оперировать с М различными значениями фазы канала, т.е. {θest, θest + θM, θest + 2θM,...θest + (M-1)· θM }, где θM =2π/М, вместо L разных значений, где L обычно намного больше, чем M. Распределение по θ должно тогда содержать только M значений или компонентов, и распределение по θ и I должно содержать только M·Q компонентов. Вычисления для упреждающих LLR и LLR обратной связи существенно упрощаются вследствие меньшего числа компонентов для оценивания. Например, если фаза канала квантована на L = 8M значений, то оценивание фазы канала с точностью до 2π/М по модулю снижает сложность оценивания канала в 8 раз. Оценивание фазы канала (например, с использованием принятых символов данных) может использоваться для любой итерационной схемы обработки в приемнике.
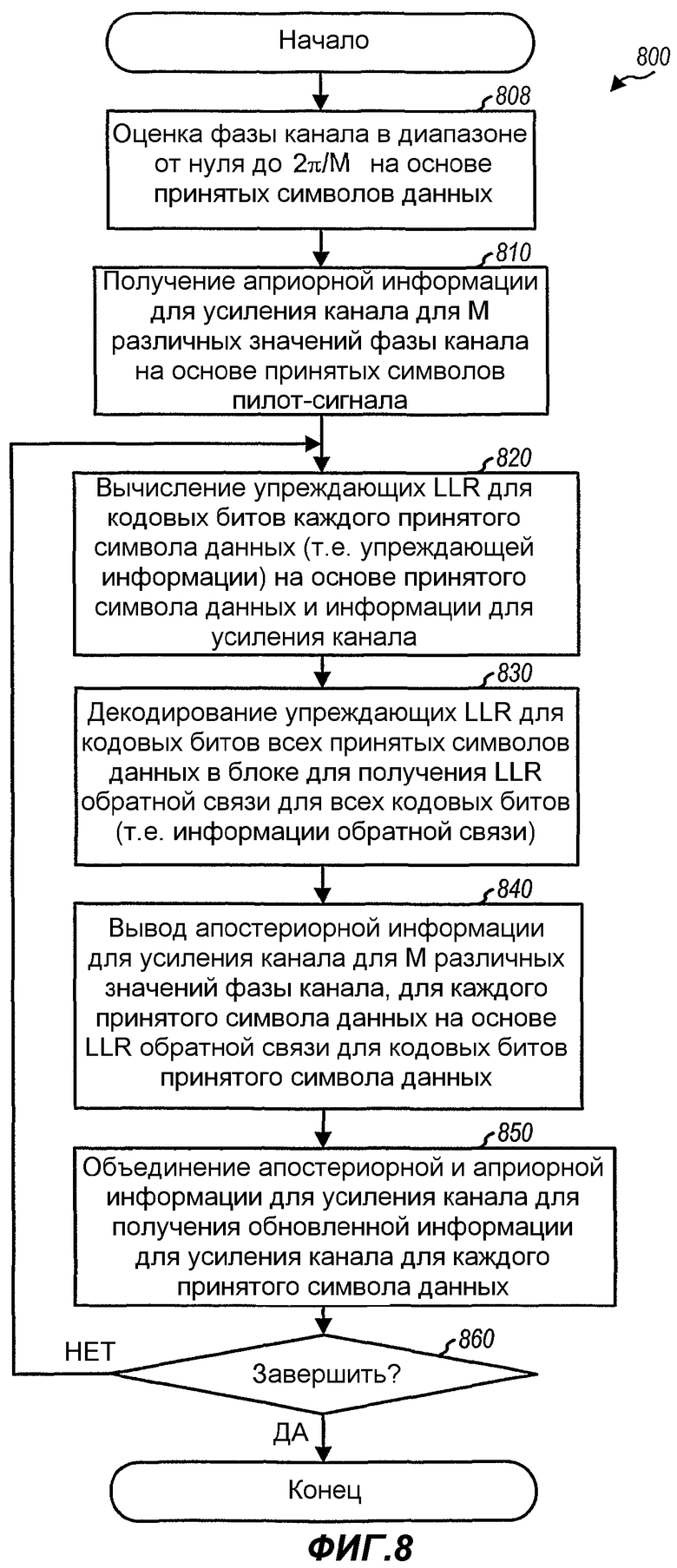
На фиг.8 показана блок-схема процесса 800 для выполнения итерационного оценивания канала и декодирования с оценкой фазы канала, полученной из принятых символов данных. Для простоты процесс 800 не учитывает помехи.
Первоначально фаза θ канала оценивается с точностью до диапазона от нуля до 2π/М на основе принятых символов данных (этап 808). Этап 808 может выполняться с использованием первого или второго метода оценивания фазы канала, описанных выше, и обеспечивает оценку фазы θest канала. Априорная информация для фазы канала затем получается на основе принятых символов пилот-сигнала для М (вместо L) разных значений θ (этап 810). Этап 810 обеспечивает распределение по θ на основе принятых символов пилот-сигнала для М разных значений θ.
Упреждающие LLR для В кодовых битов каждого принятого символа данных затем вычисляются на основе принятого символа данных и априорной информации для фазы канала (этап 820). Этап 820 может выполняться аналогично описанному выше для этапа 520 на фиг.5 или этапа 620 на фиг.6. Упреждающие LLR для всех NB кодовых битов декодируются для получения LLR обратной связи для кодовых битов (этап 830). Апостериорная информация для фазы канала затем получается для каждого принятого символа данных на основе LLR обратной связи для В кодовых битов этого символа и для М разных значений θ (этап 840). Апостериорная информация для фазы канала для ND принятых символов данных и априорная информация для фазы канала объединяются для получения обновленной информации для фазы канала для каждого принятого символа данных, вновь для М разных значений θ (этап 850).
Затем определяется, следует ли завершить итерационное оценивание канала и декодирование (этап 860). Если ответом является «нет», то процесс возвращается к этапу 820 для обновления упреждающих LLR для В кодовых битов каждого принятого символа данных на основе принятого символа данных и обновленного распределения по θ. В противном случае процесс завершается. Вновь этап 860 может быть выполнен после этапа 830.
Фиг.5, 6 и 8 показывают три конкретные схемы для выполнения итерационной обработки в приемнике. Схема, показанная на фиг.5, итерационным образом обновляет информацию как для фазы канала, так и для помехи, схема, показанная на фиг.6, итерационным образом обновляет информацию для фазы канала и неитерационным способом оценивает помеху, и схема, показанная на фиг.8, итерационным образом обновляет информацию для фазы канала и использует информацию о фазе, полученную из принятых символов данных. Различные другие итерационные схемы также могут быть реализованы и также входят в объем изобретения. Например, информация как для фазы канала, так и для помехи, может итерационным способом обновляться для малого числа итераций, и после этого информация только для фазы канала может обновляться итерационным способом. В качестве другого примера информация для фазы канала может быть получена однократно, а информация для помехи может обновляться итерационным способом. В качестве еще одного примера число значений для фазы канала и помехи может уменьшаться в последующих итерациях. Так как распределение становится более компактным, некоторые из точек имеют пренебрежимо низкие вероятности и могут игнорироваться.
С учетом фиг.3 и 4 итерационная схема оценивания канала и помехи и декодирования может рассматриваться как итерация между декодером 340 и детектором 360 апостериорной вероятности (АРР) (с промежуточными канальным обращенным перемежителем 336 и канальным перемежителем 342). АРР-детектор возвращает распределение по биту (т.е. LLR), в то время как МАР-детектор возвращает наиболее вероятное значение бита (т.е. 0 или 1). АРР-детектор 360 использует информацию обратной связи (поступающих LLR) от декодера 340 и принятые символы пилот-сигнала и данных (принятые значения) для получения упреждающей информации (обновленных LLR) для декодера 340. АРР-детектор 360 оценивает канал и помеху на основе информации обратной связи и принятых значений, и информация о канале и помехе отражается в упреждающей информации, обеспечиваемой АРР-детектором 360 для декодера 340. Другие типы детектора, известные в технике, также могут использоваться для АРР-детектора.
На графе Таннера 400 узел 410 оценивания канала и помехи, узлы 420 детектирования, узлы 440 оценивания представляют одну реализацию МАР-детектора 360. МАР-детектор 360 также может быть реализован другими способами, которые входят в объем изобретения.
Согласно фиг.3 процессор RX-данных 330 может реализовать любую схему обработки в приемнике. Для показанной на фиг.5 схемы блок 332 оценки выполняет этапы 510, 540 и 550, детектор 334 выполняет этап 520 и декодер 340 выполняет этап 530. Для схемы, показанной на фиг.6, блок 332 оценки выполняет этапы 610, 640 и 650, детектор 334 выполняет этап 620 и декодер 340 выполняет этап 630. Для схемы, показанной на фиг.8, блок 332 оценки выполняет этапы 808, 810, 840 и 850, детектор 334 выполняет этап 820 и декодер 340 выполняет этап 830.
Для примера, ниже описана обработка, выполняемая процессором 330 RX-данных, для схемы, показанной на фиг.4 и 5. Блок 332 оценивания канала и помехи реализует узел 410 и узлы 440а-440n оценивания на фиг.4. Для первой итерации блок 332 оценивания канала и помехи получает принятые символы пилот-сигнала от OFDM-демодулятора 320, выводит априорную информацию для фазы канала и помехи на основе принятых символов пилот-сигнала и выдает априорную информацию в детектор 334. Для каждой последующей итерации блок 332 оценивания получает принятые символы пилот-сигнала от OFDM-демодулятора 320 и LLR обратной связи для В кодовых битов каждого принятого символа данных от канального перемежителя 342, выводит апостериорную информацию для усиления канала и помехи для каждого принятого символа данных, объединяет апостериорную информацию и априорную информацию и выдает обновленную информацию для усиления канала и помехи для каждого принятого символа данных на детектор 334.
Детектор 334 реализует узлы 420а-420n детектирования на фиг.4. Детектор 334 получает принятые символы данных от OFDM-демодулятора 320 и априорную/обновленную информацию для фазы канала и помехи с блока 332 оценивания. Детектор 334 вычисляет упреждающие LLR для В кодовых битов каждого принятого символа данных на основе априорной/обновленной информации и принятого символа данных и выдает упреждающие LLR на канальный обращенный перемежитель 336. Канальный обращенный перемежитель 336 выполняет обращенное перемещение для упреждающих LLR. Декодер 340 выполняет декодирование обращенно перемещенных упреждающих LLR и выдает LLR обратной связи для В кодовых битов каждого принятого символа данных на канальный перемежитель 342. Канальный перемежитель 342 выполняет перемежение LLR обратной связи и выдает перемеженные LLR обратной связи на блок 332 оценивания.
Как описано выше, информация для фазы канала и помехи представлена распределениями вероятности. Кроме того, упреждающая информация и информация обратной связи представлены посредством LLR. Другие представления также могут использоваться для фазы канала и помехи и кодовых битов, которые также входят в объем настоящего изобретения. Например, могут использоваться представление в логарифмической области, инверсные вероятности, и т.д. Вычисления для различных этапов на фиг.5, 6 и 8 зависят от конкретных представлений, используемых для фазы канала, помехи и кодовых битов.
Для ясности конкретно описано вычисление для каждого из этапов на фиг.5. Каждый этап может также получать свою информацию иными способами, входящими в объем изобретения. В качестве примера, для этапа 510 на фиг.5, принятые символы пилот-сигнала могут обрабатываться для получения оценки пилот-сигнала, которая указывает на нормализованное представление канала для символов пилот-сигнала, как показано уравнением (2). Оценка пилот-сигнала может быть получена (1) умножением принятых символов пилот-сигнала на комплексно-сопряженный символ пилот-сигнала для удаления модуляции пилот-сигнала и (2) максимального объединения всех символов пилот-сигнала, принятых для восстанавливаемого блока символов. Оценка пилот-сигнала затем используется для получения совместного распределения вероятности по θ и I для априорной информации для фазы канала и помехи.
Для простоты в описании, приведенном выше, предполагается, что амплитуда канала известна в приемнике (например, определена с помощью некоторых средств) и итерационным способом оценивается только фаза канала. Амплитуда канала также может оцениваться итерационным способом вместе с фазой канала, хотя и за счет повышения сложности.
Описанные итерационные способы обработки в приемнике могут использоваться для различных систем беспроводной связи, таких как система, основанная на OFDM, система с множеством входов и множеством выходов (MIMO) и т.д. Эти методы могут также использоваться для прямой (нисходящей) линии связи и для обратной (восходящей) линии связи. Для нисходящей линии связи передатчик 200 является частью пункта доступа или базовой станцией, а приемник 300 является частью пользовательского терминала или удаленной станцией. Для восходящей линии связи передатчик 200 является частью пользовательского терминала, а приемник 300 - частью пункта доступа.
Описанные итерационные способы обработки в приемнике могут быть реализованы различными средствами. Например, эти методы могут быть реализованы аппаратными средствами, программным обеспечением или комбинацией обоих типов средств. В случае аппаратной реализации блоки обработки, используемые для итерационной обработки в приемнике (например, процессор 330 RX-данных на фиг.3), могут быть реализованы на одной или более специализированных интегральных схемах (ASIC), цифровых процессорах сигналов (DSP), устройствах цифровой обработки сигналов (DSPD), программируемых логических устройствах (PLD), программируемых пользователем вентильных матрицах (FPGA), процессорах, контроллерах, микроконтроллерах, микропроцессорах, других электронных блоках, предназначенных для выполнения описанных функций, или комбинациях указанных средств.
Для реализации с помощью программного обеспечения итерационные методы обработки в приемнике могут быть реализованы с помощью модулей (например, процедур, функций и т.д.), которые выполняют описанные функции. Программные коды могут быть сохранены в блоке памяти (например, в блоке 352 памяти на фиг.3) и могут исполняться процессором (например, контроллером 350). Блок памяти может быть реализован в процессоре или внешним образом по отношению к процессору.
Приведенное выше описание раскрытых вариантов осуществления предназначено для того, чтобы обеспечить возможность специалистам в данной области техники реализовать или использовать настоящее изобретение. Различные модификации этих вариантов осуществления должны быть очевидны для специалистов в данной области техники, а общие определенные здесь принципы могут применяться к другим вариантам осуществления без отклонения от сущности и объема изобретения. Таким образом, изобретение не ограничивается представленными вариантами осуществления, а должно соответствовать самому широкому объему, совместимому с раскрытыми принципами и новыми признаками.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДЕТЕКТИРОВАНИЕ И ДЕКОДИРОВАНИЕ С УМЕНЬШЕННОЙ СЛОЖНОСТЬЮ ДЛЯ ПРИЕМНИКА В СИСТЕМЕ СВЯЗИ | 2006 |
|
RU2414062C2 |
| СПОСОБ ИТЕРАТИВНОГО ДЕТЕКТИРОВАНИЯ И ДЕКОДИРОВАНИЯ СИГНАЛА В СИСТЕМАХ СВЯЗИ С MIMO КАНАЛОМ | 2012 |
|
RU2523190C1 |
| МАР ДЕКОДЕР ЛОКАЛЬНОГО СТИРАНИЯ | 2004 |
|
RU2339161C2 |
| ДЕТЕКТИРОВАНИЕ СИГНАЛОВ С ИСПОЛЬЗОВАНИЕМ МЕТОДА СФЕРИЧЕСКОГО ДЕКОДИРОВАНИЯ | 2005 |
|
RU2352064C2 |
| ПЕРЕДАЧА С ИНКРЕМЕНТНОЙ ИЗБЫТОЧНОСТЬЮ В СИСТЕМЕ СВЯЗИ MIMO | 2004 |
|
RU2369021C2 |
| ПЕРЕДАЧА С ИНКРЕМЕНТНОЙ ИЗБЫТОЧНОСТЬЮ В СИСТЕМЕ СВЯЗИ MIMO | 2004 |
|
RU2502197C2 |
| СПОСОБ ДЕТЕКТИРОВАНИЯ СИГНАЛА В СИСТЕМАХ СВЯЗИ С MIMO КАНАЛОМ | 2010 |
|
RU2444846C1 |
| Способ декодирования LDPC-кодов и устройство для его осуществления | 2016 |
|
RU2628459C1 |
| ОБНАРУЖЕНИЕ ДАННЫХ ДЛЯ ПЕРЕДАЧИ ИЕРАРХИЧЕСКИ КОДИРОВАННЫХ ДАННЫХ | 2004 |
|
RU2360373C2 |
| ОЦЕНКА КАНАЛА БЕСПРОВОДНОЙ СИСТЕМЫ СВЯЗИ С МНОЖЕСТВОМ ПАРАЛЛЕЛЬНЫХ ПОТОКОВ ДАННЫХ | 2005 |
|
RU2332801C2 |
Изобретение относится к области связи. Техническим результатом является получение обновленной информации для усиления канала и помех, а также оценивание фазы канала в системе беспроводной связи. В соответствии со схемой итеративного оценивания канала и помех и декодирования сначала получают априорную информацию об усилении канала и помех на основе принятых символов пилот-сигнала, упреждающая информация для кодовых битов, соответствующих принятым символам данных, выводится на основе принятых символов данных и априорной информации и затем декодируется для получения информации обратной связи для кодовых битов, соответствующих принятым символам данных, на основе информации обратной связи для этих принятых символов данных получают апостериорную информацию для усиления канала и помех для каждого принятого символа данных, апостериорная информация для принятых символов данных и априорная информацию объединяются для получения обновленной информации для усиления канала и помех для каждого принятого символа данных. 13 н. и 40 з.п. ф-лы, 9 ил.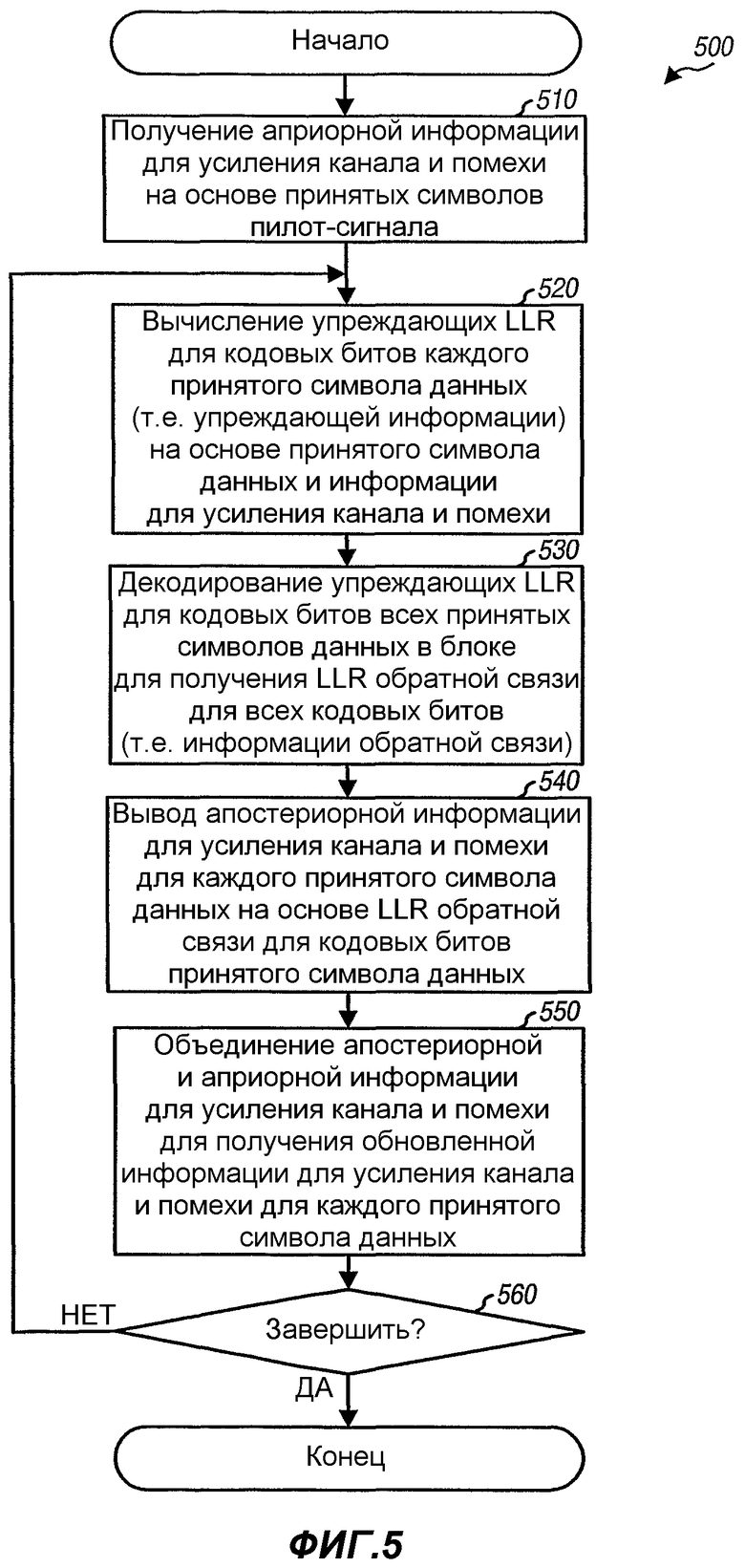
| СПОСОБ КОДИРОВАНИЯ И ДЕКОДИРОВАНИЯ ДАННЫХ ДЛЯ СИСТЕМЫ РАДИОВЕЩАТЕЛЬНОЙ ПЕРЕДАЧИ ЦИФРОВЫХ СООБЩЕНИЙ | 1994 |
|
RU2110148C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ ПЕРЕДАННЫХ ИНФОРМАЦИОННЫХ СИГНАЛОВ ПОСЛЕ ПРОХОЖДЕНИЯ ИХ ЧЕРЕЗ КАНАЛ СВЯЗИ | 2001 |
|
RU2214690C2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 6160840 A, 12.12.2000 | |||
| KR 20030063859 A, 31.07.2003 | |||
| Способ рекультивации нарушенных земель | 1986 |
|
SU1376965A1 |
| СПОСОБ ПРОИЗВОДСТВА КОНСЕРВОВ "ПТИЦА С ГАРНИРОМ" | 2007 |
|
RU2346520C1 |

