Изобретение относится к области добычи и обработки различных твердых материалов резанием при помощи гибкого бесконечного рабочего органа, например камнедобычи и камнеобработки.
В настоящее время для добычи и обработки различных каменных материалов резанием широко используются станки с гибким бесконечным рабочим органом.
Известна установка для канатной распиловки камня, содержащая вертикальные направляющие, соединенные в верхней части балкой, на которых размещены суппорты с приводом перемещения, установленные на суппортах шкивы, один из которых соединен с электродвигателем, охватываемые бесконечным режущим органом в виде каната (авторское свидетельство SU 1065218 А, кл. В28D 1/08; 07.01.1984 г.; Бюл. № 1).
Во всех известных установках для осуществления технологического процесса резания необходимо создавать определенной величины контактное давление между гибким бесконечным рабочим органом и обрабатываемым материалом. Нормальное контактное давление создается при помощи натяжения гибкого бесконечного рабочего органа, который предварительно затягивается на приводных шкивах для передачи ему движения соответствующей мощности. Величина усилия предварительного натяжения соизмерима с рабочим усилием, а напряжения, обусловленные действием этих усилий, обратно пропорциональны площади поперечного сечения несущей части гибкого бесконечного рабочего органа. С другой стороны, напряжения, возникающие от изгиба гибкого бесконечного рабочего органа на приводных шкивах, пропорциональны отношению диаметра поперечного сечения несущей части рабочего органа к диаметрам приводных шкивов. Задача минимизации диаметра несущей части гибкого бесконечного рабочего органа осложняется тем, что уменьшение величин изгибных напряжений при помощи увеличения диаметров приводных шкивов приводит к тому, что увеличивается межосевое расстояние передачи и для осуществления технологического процесса приходится увеличивать предварительное натяжение гибкого бесконечного рабочего органа. Значительная часть прочностных ресурсов несущей части бесконечного рабочего органа расходуется на сопротивление предварительному натягу и изгибу на приводных шкивах.
Учитывая, что процесс резки происходит при скоростях 30-40 м/сек, алмазные перлины, установленные периодически на несущей части гибкого бесконечного рабочего органа, претерпевают большие ударные нагрузки при входе в зону резания, что отрицательно влияет на прочность гибкого бесконечного рабочего органа.
Неэффективное использование прочностных ресурсов гибкого бесконечного рабочего органа приводит к увеличению диаметра несущей части гибкого бесконечного рабочего органа, а сравнительно длинная зона резания затрудняет удаление продуктов процесса резания и создает условия для износа рабочего органа.
Все перечисленное является причиной необоснованно большой ширины реза при использовании этих станков, уменьшения долговечности сравнительно дорогого рабочего органа, увеличения энергоемкости технологического процесса и роста доли отходов относительно готовой продукции.
В основу настоящего изобретения положена задача создания станка для резки различных твердых материалов при помощи гибкого бесконечного рабочего органа с таким конструкторским выполнением, которое позволило бы устранить указанные выше недостатки.
Эта задача решена созданием устройства, включающего, по меньшей мере, один гибкий бесконечный рабочий орган, приводной механизм, состоящий из ременной передачи и снабженный кольцевым пазом приводного ролика, который кинематически связан с главным приводом устройства, по меньшей мере, один ведомый ролик и одну пару направляющих роликов, снабженных кольцевыми пазами, и корпус устройства, отличающегося тем, что гибкий бесконечный рабочий орган подвижно установлен в кольцевой паз приводного ролика и прижат по дуге окружности кольцевого паза ремнем ременной передачи, установленной на диаметрально противоположной стороне от направляющих роликов, а ветви гибкого бесконечного рабочего органа подвижно установлены в кольцевой паз ведомого ролика и поддерживаются диаметрально противоположно установленными направляющими роликами, образуя висячую открытую петлю на диаметрально противоположной стороне от приводного ролика.
Основной принцип работы предложенного устройства заключается в том, что для натяжения гибкого бесконечного рабочего органа служат центробежные инерционные силы, возникающие в висячей открытой петле при движении гибкого бесконечного рабочего органа по криволинейной траектории. Висячая открытая петля гибкого бесконечного рабочего органа, находясь под действием центробежных сил, приобретает достаточную упругую жесткость для осуществления процесса резания. Учитывая, что резание твердых пород производят при больших скоростях (для алмазного реза до 30÷50 м/сек), при помощи предложенного устройства можно получить натяжение гибкого рабочего органа, вполне достаточное для осуществления процесса резания. Например, для существующих гибких рабочих органов, оснащенных алмазсодержащими перлинами диаметром 11 мм, при скорости 40 м/сек, сила натяжения бесконечного рабочего органа в зоне резания равна более 1000 Н. При этом увеличение глубины резания приводит к уменьшению силы натяжения гибкого бесконечного рабочего органа, что исключает разрыв гибкого бесконечного рабочего органа при перегрузках.
Для передачи движения гибкому бесконечному рабочему органу служит приводной механизм, который состоит из снабженного кольцевым пазом приводного ролика и ременной передачи. Ременная передача установлена в плоскости приводного ролика со стороны, диаметрально противоположной от направляющих роликов и внешней стороной ремня, обхватывает часть дуги окружности кольцевого паза приводного ролика. В кольцевом пазу приводного ролика установлена концевая открытая петля гибкого бесконечного рабочего органа и в зоне контакта с ремнем прижимается к ролику. Эта конструкция позволяет передавать гибкому рабочему органу движение необходимой мощности при сравнительно небольшой величине его натяжения, и отпадает необходимость создания предварительного натяжения гибкого бесконечного рабочего органа. Для обеспечения долговечности ремня и обеспечения высоких скоростей движения гибкого бесконечного рабочего органа удобно пользоваться зубчато-ременной передачей. Конструктивные элементы ременной передачи необходимо рассчитывать из условия обеспечения их прочности при создании необходимого контактного давления на гибкий бесконечный рабочий орган при помощи ремня. Величина контактного давления определяется из условия обеспечения контакта гибкого бесконечного рабочего органа с кольцевым пазом приводного ролика при максимальной скорости вращения приводного ролика. Диаметр ведущего шкива определяется из условия прочности гибкого рабочего органа при действии на него необходимого для резания натяжения и изгиба по радиусу ведущего ролика. Использование устройства передачи движения предложенной нами конструкции позволяет обеспечить минимальный диаметр ведущего ролика и независимо от величины скорости гибкого бесконечного рабочего органа обеспечить передачу необходимой для процесса резания приводной мощности.
Ведомый ролик установлен между ветвями гибкого бесконечного рабочего органа на диаметрально противоположной стороне от ременной передачи. Для обеспечения равномерного движения обеих ветвей гибкого бесконечного рабочего органа диаметр ведомого ролика подбирается таким образом, чтобы обеспечить частичное прилегание ветвей рабочего органа по дугам кольцевого паза ведомого ролика.
Направляющие ролики, снабженные кольцевыми пазами, установлены с обеих сторон ведомого ролика на корпусе устройства и предназначены для поддержания направления движения ветвей гибкого рабочего органа. Оси направляющих роликов смещены в сторону висячей открытой петли рабочего органа и установлены таким образом, чтобы обеспечить контакт ветвей гибкого бесконечного рабочего органа с кольцевым пазом ведомого ролика. Учитывая, что сила натяжения каната значительно меньше, чем в существующих станках, и изгибные напряжения, возникающие в гибком бесконечном рабочем органе, сравнительно небольшие, диаметр направляющих роликов можно подобрать только из конструктивных соображений.
Сравнительно небольшое натяжение каната и отсутствие возможности его роста в процессе резания позволяет существенно уменьшить диаметр несущей части гибкого бесконечного рабочего органа и тем самым добиваться увеличения толщины алмазоносного слоя на перлинах или уменьшения внешнего диаметра перлин, что позволит увеличить долговечность гибкого рабочего органа и уменьшить энергоемкость технологического процесса.
Для равномерного изнашивания алмазных перлинов и увеличения долговечности гибкого бесконечного рабочего органа соосно устанавливаются два идентичных ведомых ролика, смещенные в разные стороны относительно серединной плоскости приводного ролика. Соответственно смещаются и устанавливаются в плоскостях ведомых роликов также направляющие ролики. При этом ветви гибкого бесконечного рабочего органа в промежутке между ведущим и ведомыми роликами являются скрещивающимися прямыми. Увеличивается угол обхвата гибким бесконечным рабочим органом как приводного ролика, так и ведомых роликов. Равнодействующая сил трения, которая действует на цилиндрическую поверхность гибкого рабочего органа со стороны стенок кольцевых пазов этих роликов, создает крутящий момент, позволяющий осуществить закручивание его относительно своей геометрической оси. Изменением величины смещения ведомых роликов можно регулировать скорость закручивания гибкого бесконечного рабочего органа.
Установив дополнительно две пары направляющих роликов, снабженных кольцевыми пазами, перпендикулярно плоскости ведущего ролика можно придать дополнительную жесткость гибкому бесконечному рабочему органу в этой плоскости.
Для осуществления глубокого реза можно приводной механизм перемещать относительно направляющих роликов, меняя длину висячей части гибкого бесконечного рабочего органа. В начале процесса резания приводной механизм находится на максимальном удалении от направляющих роликов и длина висячей части гибкого бесконечного рабочего органа минимальна, что придает ему максимальную жесткость. В дальнейшем глубину реза можно установить перемещением приводного механизма относительно направляющих роликов. Если необходимо осуществить изменение длины висячей части гибкого бесконечного рабочего органа в процессе резания, лучше пользоваться схемой двух идентичных смещенных ведомых роликов. При этом ролики должны быть кинематически соединены таким образом, чтобы обеспечить их взаимное вращение только при рабочих скоростях гибкого бесконечного рабочего органа. Например, их можно соединить при помощи нормально замкнутой фрикционной муфты центробежного действия.
Можно для обеспечения постоянного контактного давления на гибкий бесконечный рабочий орган на ременную передачу приводного механизма установить затяжной механизм. Механизм позволит обеспечить необходимое контактное давление на гибкий бесконечный рабочий орган независимо от величины его износа.
Можно кольцевые пазы направляющих роликов снабжать слоем фрикционного покрытия (например, пластик EPDM 80), что позволит существенно повысить их долговечность и уменьшить истирание алмазных зерен.
Можно устройство оснастить несколькими гибкими бесконечными рабочими органами, что позволит осуществить одновременный рез в нескольких параллельных плоскостях. При этом общее количество комплектов приводных механизмов, ведомых и направляющих роликов равно количеству используемых гибких рабочих органов. Для упрощения установки толщин разрезаемых плит удобно комплекты установить смещенными в шахматном порядке. При этом в отличие от существующих станков, в которых используются сложные механизмы натяжения, предлагаемая конструкция обеспечивает практически равномерное натяжение гибкого бесконечного рабочего органа.
Можно устройство оснастить системой подачи воды в зону резания. Это позволит увеличить долговечность гибкого бесконечного рабочего органа.
Учитывая, что ультразвуковые колебания благоприятно влияют на процесс резания и конструкция станка позволяет их создавать, можно устройство передачи движения снабдить аппаратом для создания ультразвуковых колебаний рабочего органа непосредственно в зоне резания.
Для лучшего понимания предлагаемого изобретения приведены схематичные изображения предлагаемого устройства.
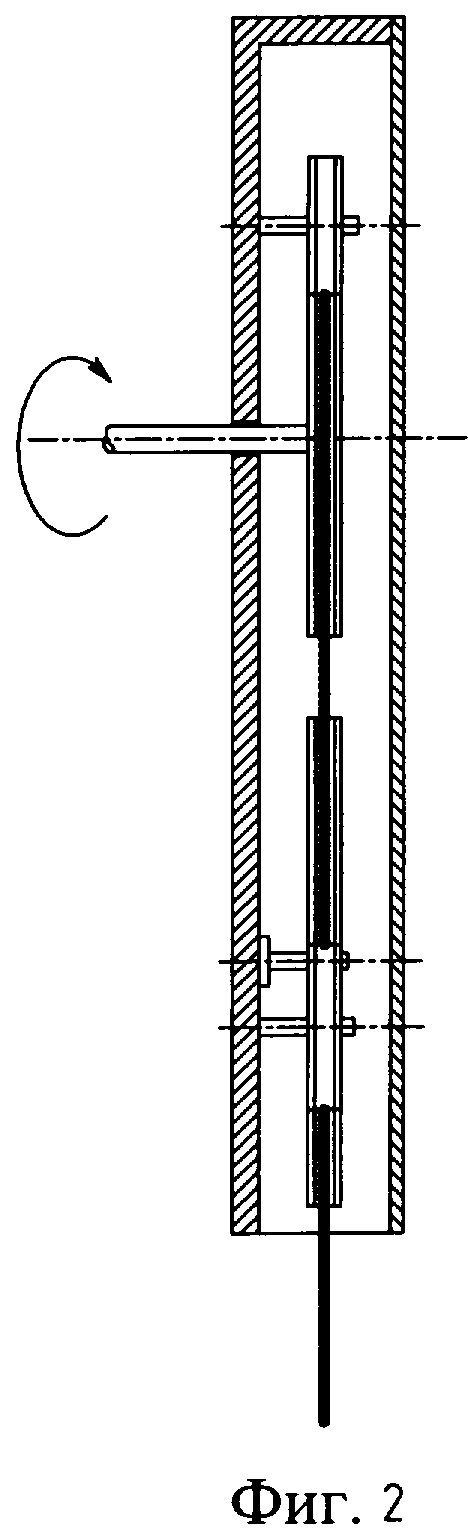
Фиг.1 и 2 схематично изображает устройство с гибким бесконечным рабочим органом согласно изобретению.
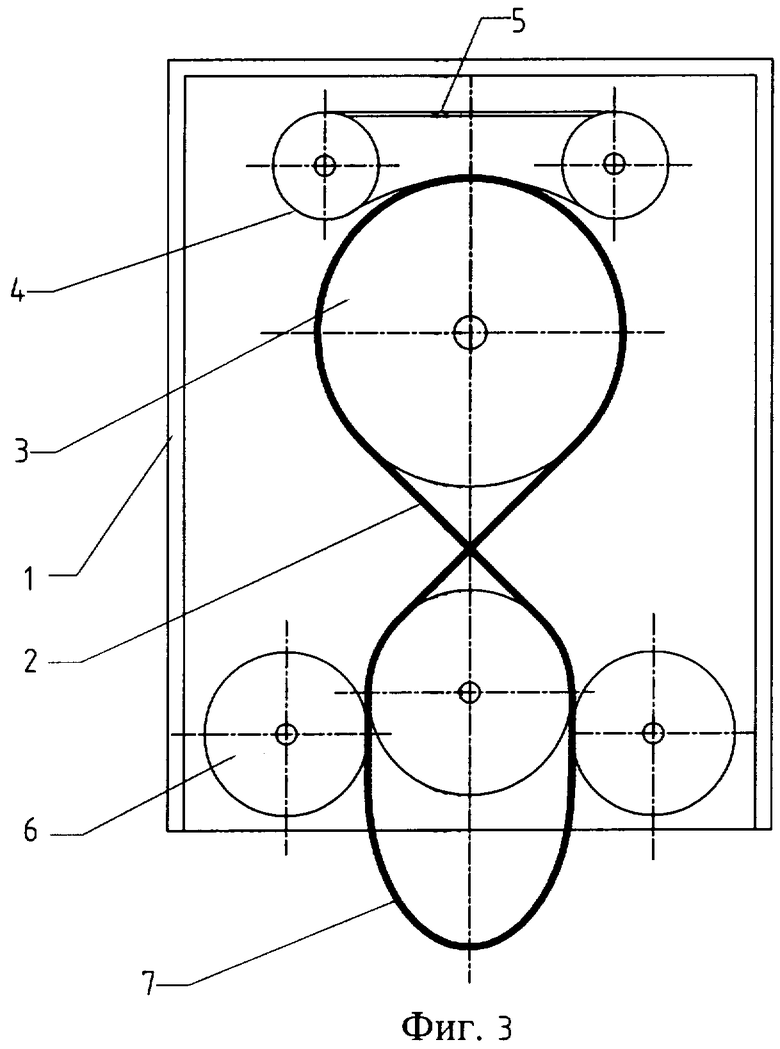
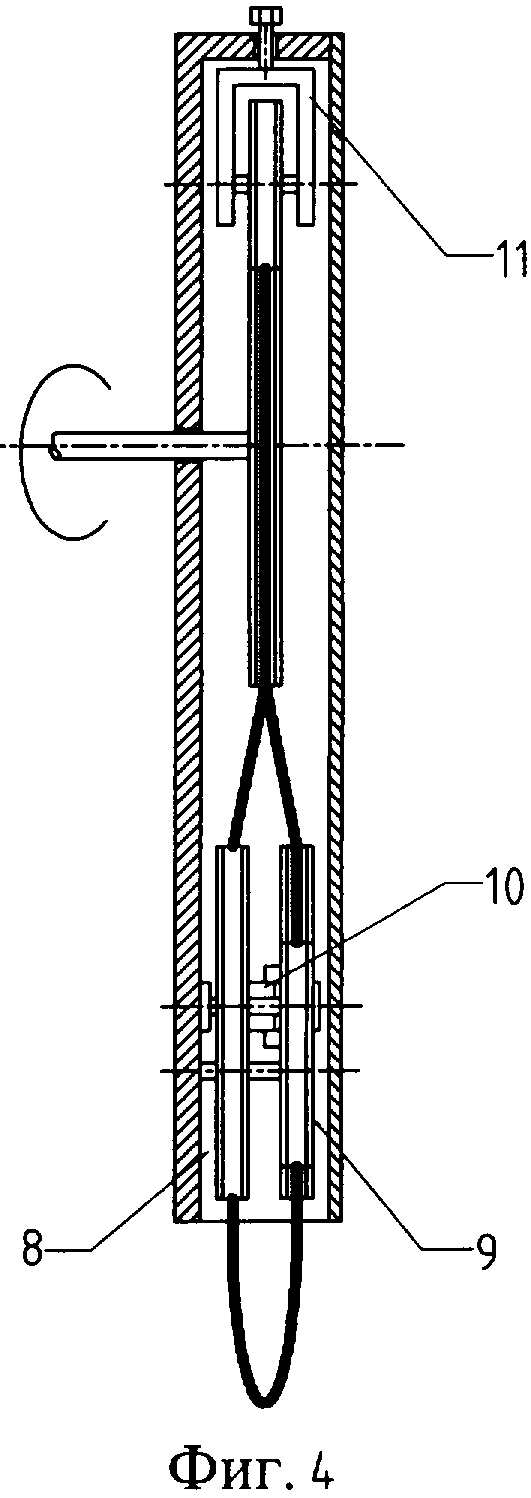
Фиг.3 и 4 схематично изображают устройство со смещенными ведомыми роликами.
Предлагаемое устройство с гибким бесконечным рабочим органом включает корпус 1 (фиг.1), на котором подвижно закреплена ременная передача 4 и симметрично к нему установлен приводной ролик 3. В кольцевой паз приводного ролика 3 установлен гибкий бесконечный рабочий орган 2, который прижимается ремнем 5 ременной передачи 4. Приводной ролик 8 установлен на оси симметрии приводного механизма, а установленные в его кольцевом пазу ветви гибкого бесконечного рабочего органа 2 поддерживаются направляющими роликами 6. Вне корпуса 1 устройства находится висячая открытая петля 7 гибкого бесконечного рабочего органа 2.
На фиг.2 показано схематичное изображение устройства, которое снабжено двумя соосными идентичными ведомыми роликами 8 и 9, смещенными в разные стороны от приводного ролика 3. Ветви гибкого бесконечного рабочего органа 2 в промежутке между приводным механизмом и ведомыми роликами 8, 9 являются скрещивающимися. Ременная передача оснащена затяжным механизмом 11, ведомые ролики 8 и 9 кинематически соединены нормально замкнутой фрикционной муфтой центробежного действия 10.
Устройство работает следующим образом.
Включается главный привод устройства. При помощи приводного механизма гибкому бесконечному рабочему органу сообщается рабочее движение. После достижения контакта бесконечного рабочего органа с обрабатываемым материалом начинается процесс резки.
Настоящее изобретение может быть использовано при добыче и обработке различных каменных материалов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТВЕРДЫХ МАТЕРИАЛОВ И ЕГО БЕСКОНЕЧНЫЙ РАБОЧИЙ ОРГАН | 2010 |
|
RU2441751C2 |
| УСТРОЙСТВО ДЛЯ БУРЕНИЯ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН | 2007 |
|
RU2352749C2 |
| СТАНОК С БЕСКОНЕЧНЫМ ГИБКИМ РАБОЧИМ ОРГАНОМ | 2000 |
|
RU2178080C1 |
| УСТРОЙСТВО ПЕРЕДАЧИ ДВИЖЕНИЯ (ВАРИАНТЫ) | 2000 |
|
RU2167351C1 |
| СТАНОК ДЛЯ РЕЗКИ ТВЕРДЫХ МАТЕРИАЛОВ | 2001 |
|
RU2193486C1 |
| ПОРШНЕВАЯ МАШИНА | 2001 |
|
RU2187655C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2002 |
|
RU2196236C1 |
| УСТРОЙСТВО РЕЗКИ ТВЕРДЫХ МАТЕРИАЛОВ | 2001 |
|
RU2193485C1 |
| МЕМБРАННАЯ КОМПРЕССОРНАЯ УСТАНОВКА | 2016 |
|
RU2630282C1 |
| ПИЛА КОЛЬЦЕВАЯ | 1999 |
|
RU2146612C1 |
Изобретение относится к области добычи и обработки различных твердых материалов резанием, например камнедобычи и камнеобработки. Техническим результатом является увеличение долговечности рабочего органа и уменьшение энергоемкости процесса резания. Для этого устройство включает, по меньшей мере, один гибкий бесконечный рабочий орган, который подвижно установлен в кольцевой паз приводного ролика и прижат по дуге окружности кольцевого паза приводного ролика ремнем ременной передачи, установленной на диаметрально противоположной стороне от направляющих роликов. Приводной ролик кинематически связан с главным приводом устройства. Ветви гибкого бесконечного рабочего органа подвижно установлены в кольцевой паз ведомого ролика и поддерживаются направляющими роликами, снабженными кольцевыми пазами. На диаметрально противоположной стороне от приводного ролика ветви гибкого бесконечного рабочего органа образуют висячую открытую петлю. 8 з.п. ф-лы, 4 ил.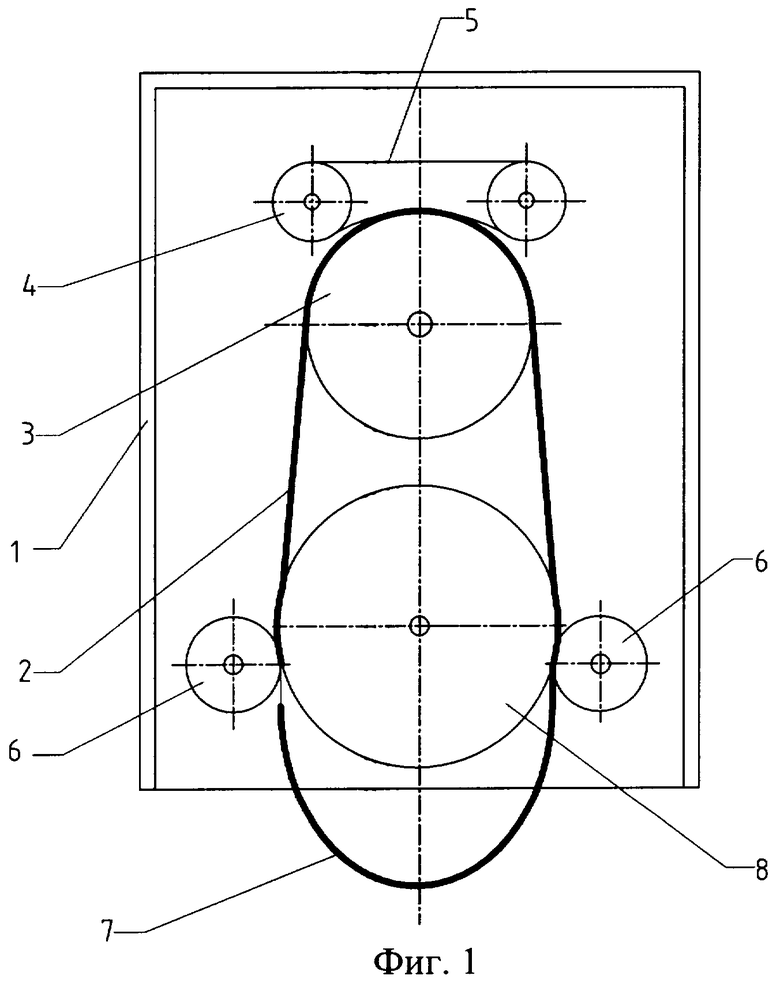
| Установка для канатной распиловки камня | 1982 |
|
SU1065218A1 |
| Колесо для повозок | 1926 |
|
SU7933A1 |
| УСТРОЙСТВО ПЕРЕДАЧИ ДВИЖЕНИЯ (ВАРИАНТЫ) | 2000 |
|
RU2167351C1 |
| СПОСОБ УЛЬТРАЗВУКОВОЙ ОБРАБОТКИ ХРУПКИХ МАТЕРИАЛОВ | 2000 |
|
RU2191673C2 |

