Изобретение относится к области добычи и обработки различных твердых материалов резанием, например камнедобычи и камнеобработки, а более конкретно - к станкам для добычи и обработки камня при помощи гибкого бесконечного рабочего органа.
В настоящее время для добычи и обработки различных каменных материалов резанием широко используются станки с бесконечным гибким рабочим органом, оснащенным алмазсодержащими перлинами.
Известен, например, станок, содержащий вертикальные направляющие, соединенные в верхней части балкой, на которых размещены суппорты с приводом перемещения, установленные на суппортах шкивы, один из которых соединен с электродвигателем, охватываемые бесконечным режущим органом в виде каната (Патент США N 2994314, кл. 125-21, 1961 г. ).
Известна также установка для канатной распиловки камня, содержащая вертикальные направляющие, соединенные в верхней части балкой, на которых размещены суппорты с приводом перемещения, установленные на суппортах шкивы, один из которых соединен с электродвигателем, охватываемые бесконечным режущим органом в виде каната (авт. св. SU 1065218 А, кл. В 28 D 1/08; 07.01.84. ; Бюл. 1).
Во всех известных станках приводом гибкого рабочего органа является ведущий шкив.
Недостатками этих станков являются создание значительного предварительного натяжения гибкого бесконечного рабочего органа для обеспечения передачи ему движения соответствующей мощности и неизбежный изгиб с последующим разгибом напряженного гибкого рабочего органа на приводных шкивах станка.
Величина усилия предварительного натяжения соизмерима с рабочим усилием, создаваемым главным приводом станка для осуществления технологического процесса, а напряжения, обусловленные действием этих усилий, обратно пропорциональны площади поперечного сечения несущей части гибкого бесконечного рабочего органа станка. С другой стороны, напряжения, возникающие от изгиба гибкого бесконечного рабочего органа на приводных шкивах, пропорциональны отношению диаметра поперечного сечения несущей части рабочего органа к диаметрам приводных шкивов. Задача осложняется тем, что уменьшение величин изгибных напряжений при помощи увеличения диаметров приводных шкивов приводит к тому, что увеличивается межосевое расстояние передачи, и для осуществления технологического процесса приходится увеличивать предварительное натяжение гибкого бесконечного рабочего органа. Значительная часть прочностных ресурсов несущей части бесконечного рабочего органа расходуется на сопротивление предварительному натягу и изгибу на приводных шкивах.
Если учесть, что при работе с алмазными перлинами скорость резания достигает величины до 30-40 м/с, а диаметр ведущего шкива у существующих станков составляет 1,5-2 м для компенсации центробежных сил необходимо обеспечить дополнительное натяжение гибкого рабочего органа.
Неэффективное использование прочностных ресурсов бесконечного рабочего органа приводит к увеличению диаметра несущей части гибкого бесконечного рабочего органа, что является причиной увеличения внутреннего диаметра алмазных перлин, закрепленных на нем. Следовательно, уменьшается толщина алмазного слоя на перлинах при неизменном внешнем диаметре, что уменьшает долговечность бесконечного рабочего органа, или при обеспечении адекватной долговечности увеличивается ширина распила, что приводит к увеличению энергоемкости процесса.
Схемы работы известных станков предполагают почти одинаковые углы при входе и выходе гибкого бесконечного рабочего органа в зону резания и из него. Учитывая, что процесс резки происходит при довольно высоких скоростях (выше 30 м/с), алмазные перлины, установленные периодически на несущей части гибкого бесконечного рабочего органа, претерпевают большие ударные нагрузки при входе в зону резания, что отрицательно влияет на прочность алмазных зерен.
Все перечисленное является причиной необоснованно большой ширины реза при использовании этих станков, уменьшения долговечности сравнительно дорогого рабочего органа, увеличения энергоемкости технологического процесса и роста доли отходов относительно готовой продукции.
В основу настоящего изобретения положена задача создания станка для резки различных твердых материалов при помощи гибкого бесконечного рабочего органа с таким конструкторским выполнением, которое позволило бы устранить указанные выше недостатки.
Эта задача решена созданием станка, включающего, по меньшей мере, один гибкий бесконечный рабочий орган, подвижно затянутый при помощи затяжного направляющего аппарата, который подвижно закреплен на станине станка, привод подачи на резание, устройство передачи движения гибкому бесконечному рабочему органу, кинематически связанное с главным приводом станка, станину и стол для установки заготовки, отличающегося тем, что затяжной направляющий аппарат состоит из не менее трех секторов, установленных на участках изгиба траектории гибкого бесконечного рабочего органа, на которых по дуге окружности, сопрягающей прямолинейные участки гибкого бесконечного рабочего органа, закреплены с возможностью вращения вокруг своих осей направляющие ролики, снабженные кольцевыми пазами, и у одного из ближайших от заготовки секторов, по меньшей мере, одна из связей с ближайшим по направлению подачи на резание сектором является упругоуправляемой, а на другом, ближайшем от заготовки секторе, между заготовкой и направляющими роликами установлено устройство передачи движения, в котором подвижно закреплен гибкий бесконечный рабочий орган.
Применение устройства передачи движения, конструкция которого разработана авторами настоящего изобретения (подробное описание изобретения приводится в заявке на патент РФ N 2000119810/28), позволяет исключить появление изгибных напряжений в зоне передачи движения, и отпадает необходимость создания предварительного натяжения гибкого бесконечного рабочего органа для передачи движения. Следовательно, гибкий бесконечный рабочий орган находится под рабочим напряжением только на участке зона резания - устройство передачи движения. Это позволяет существенно уменьшить диаметр несущей части гибкого бесконечного рабочего органа и тем самым добиваться как увеличения толщины алмазоносного слоя на перлинах, так и уменьшения внешнего диаметра перлин, что позволит увеличить долговечность гибкого рабочего органа и уменьшить энергоемкость технологического процесса.
Учитывая, что гибкий бесконечный рабочий орган работает при высоких скоростях (более 30 м/с), использование устройства передачи движения предложенной нами конструкции позволяет, независимо от величины скорости, обеспечить передачу приводной мощности.
Уменьшение усилия натяжения гибкого бесконечного рабочего органа вне зоны заготовка - устройство передачи движения, позволяет приводные шкивы заменить направляющими роликами, установленными по дуге окружности. При этом напряженное состояние несущей части гибкого рабочего органа будет определяться не радиусом кривизны роликов, а радиусом дуги окружности, по которой они установлены. Это позволяет сократить пролет гибкого рабочего органа примерно на диаметр предполагаемых шкивов и осуществить технологический процесс при небольшом натяжении.
Придание одному из ближайших к заготовке сектору упругоуправляемой связи, например по направлению подачи на резание, позволяет легко установить гибкий бесконечный рабочий орган определенной длины в кольцевых пазах роликов направляющего аппарата. Установив при помощи регулировки определенную жесткость упругоуправляемой связи, необходимую для осуществления технологического процесса, можно обеспечить небольшой угол (менее π /12) входа в зону резания гибкого бесконечного рабочего органа. При этом угол выхода гибкого рабочего органа из зоны резания будет больше угла входа и его величина будет зависеть от усилия подачи на резание. Сила подачи на резание по зоне резания будет распределяться неравномерно. Величина давления гибкого рабочего органа на заготовку меньше у входа в зону резания и непрерывно меняется в зависимости от угла выхода. Это позволит обеспечить плавную работу гибкого рабочего органа и всего станка и исключит возможность возникновения ударных нагрузок на алмазных перлинах. Наклон реза по длине зоны резания позволяет легко удалить отходные продукты процесса резания с жидкостью, подаваемой для охлаждения алмазных перлинов, и тем самым увеличить долговечность гибкого рабочего органа.
Для окончательной резки заготовки стол станка может быть снабжен механизмом для осуществления угловой подачи при помощи поворота заготовки к устройству передачи движения в плоскости реза.
Для равномерного изнашивания алмазных перлинов и увеличения долговечности гибкого бесконечного рабочего органа между заготовкой и направляющим аппаратом установлен, по меньшей мере, один ролик, сдвинутый относительно плоскости гибкого бесконечного рабочего органа. Равнодействующая сил трения, которые действуют на цилиндрическую поверхность гибкого рабочего органа со стороны стенки кольцевого паза этого ролика, создает крутящий момент, позволяющий осуществить закручивание его относительно своей геометрической оси. Изменением величины смещения ролика можно регулировать скорость закручивания гибкого бесконечного рабочего органа.
Можно кольцевые пазы направляющих роликов снабжать слоем антифрикционного покрытия (например, пластик EPVD 80), что позволит существенно повысить их долговечность и позволит уменьшить истирание алмазных зерен.
Закрепив устройство передачи движения шарнирно, чтобы он мог самоустанавливаться по направлению натяжения гибкого бесконечного рабочего органа, можно уменьшить угол его изгиба и улучшить функционирование устройства передачи движения.
Учитывая, что ультразвуковые колебания благоприятно влияют на процесс резания и конструкция станка позволяет их создавать, можно устройство передачи движения снабдить аппаратом для создания продольных ультразвуковых колебаний рабочего органа непосредственно в зоне резания.
Можно упругоуправляемой связью оснастить один из секторов, не находящийся в непосредственной близости обрабатываемой заготовки, что имеет смысл при обработке материалов с низкой прочностью.
Для обеспечения равномерной работы рабочего органа на станок между направляющим аппаратом и заготовкой устанавливается, по меньшей мере, один ролик, сдвинутый относительно плоскости, в котором находится гибкий бесконечный рабочий орган, для закручивания его относительно своей геометрической оси.
Возможно использование сменных антифрикционных слоев в ролике механизма подачи на резание.
Для уменьшения силы натяжения гибкого бесконечного рабочего органа вне зоны резания удобно его подвижно закрепить в устройствах передачи движения с обеих сторон обрабатываемой заготовки, одно из которых является ведомым и закрепляется на секторе, обладающем упругоуправляемой связью. Это позволяет настолько уменьшить силу натяжения гибкого бесконечного рабочего органа, что направляющий аппарат снабжается роликами, установленными только на траектории изгиба гибкого рабочего органа.
Для лучшего понимания предлагаемого изобретения приведены схематичные изображения станка.
Фиг. 1 схематично изображает станок с гибким бесконечным рабочим органом согласно изобретению.
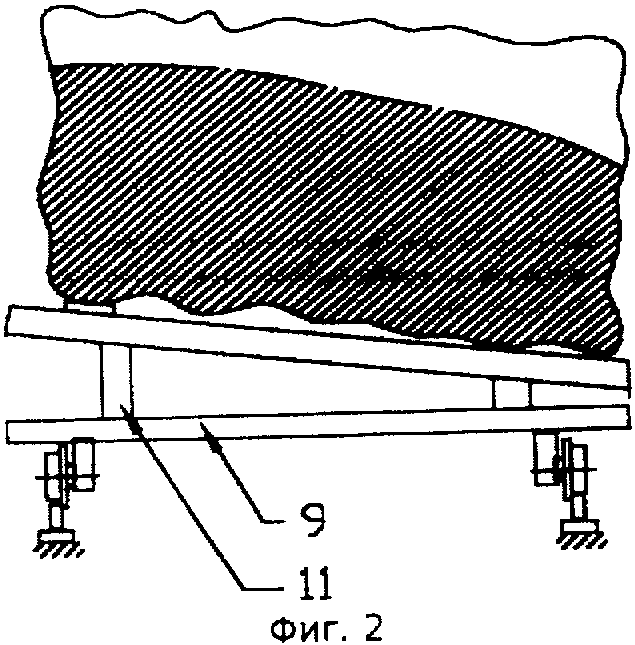
Фиг. 2 схематично изображает стол станка при осуществлении угловой подачи.
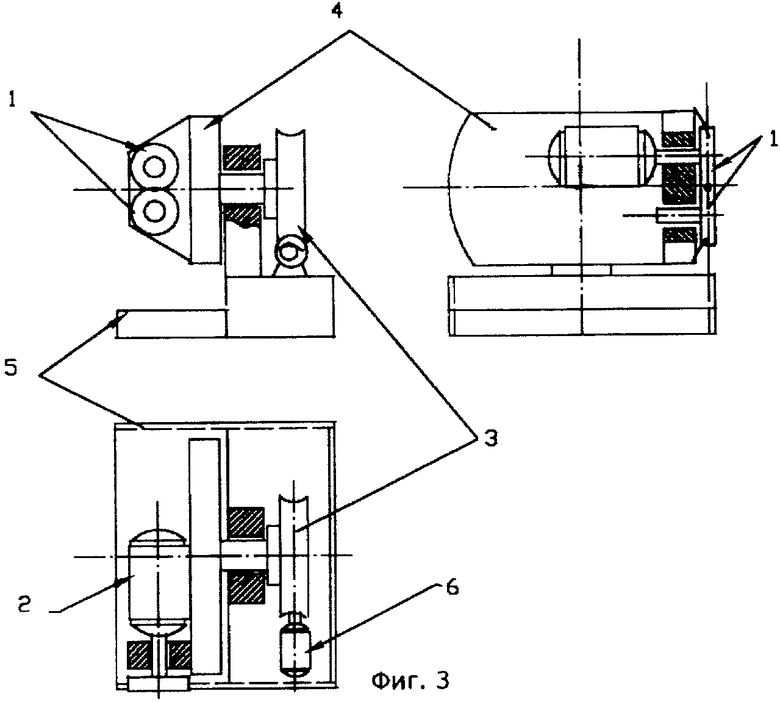
Фиг. 3 схематично изображает станок с направляющими роликами, установленными только на изгибах траектории гибкого рабочего органа.
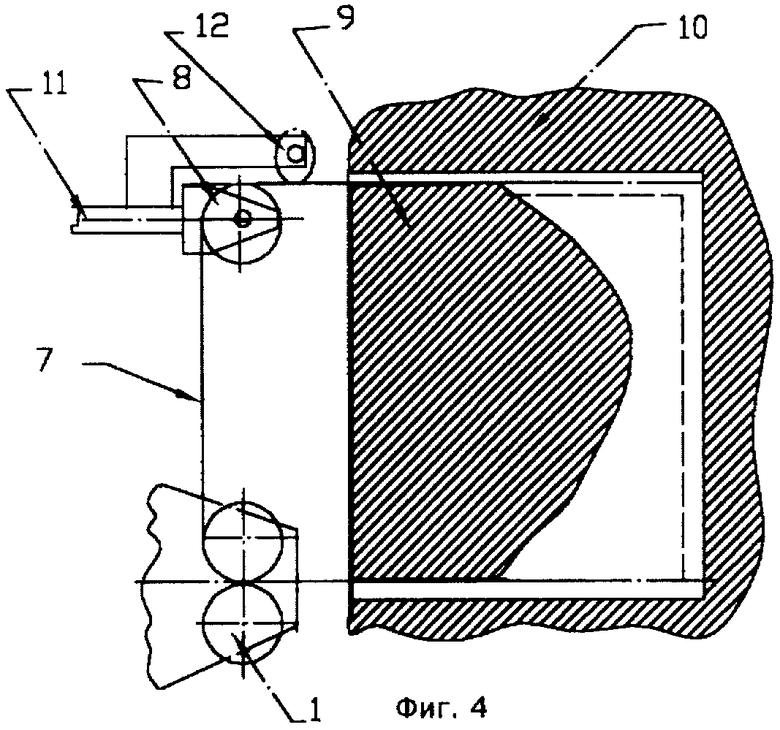
Фиг. 4 схематично изображает предлагаемый станок с тремя секторами.
Предлагаемый станок с гибким бесконечным рабочим органом включает П-образной формы станину 5 (фиг. 1), на котором подвижно закреплены секторы 2,3,4,4 направляющего аппарата. При помощи привода подачи на резание (на чертежах не приводится) эти секторы получают перемещение в вертикальном направлении. Сектор 2 с сектором 3 соединен при помощи упругоуправляемой связи 7, жесткостью которой можно управлять. На секторах по дуге окружности закреплены ролики 6, которые свободно вращаются вокруг своих осей и служат направляющими для гибкого бесконечного рабочего органа 1. Перемещая сектор 2, к сектору 3 устанавливают гибкий рабочий орган 1 и подвижно закрепляют в устройстве передачи движения 8, который закреплен на секторе 4. Устройство передачи движения кинематически связано с главным приводом станка (на чертежах не приводится) и сообщает движение резания гибкому рабочему органу 1. Ролик 12 установлен на секторе 2, смещенном относительно направления гибкого бесконечного рабочего органа 1, и позволяет закручивать его относительно своей геометрической оси. В середине П-образной станины 5, перпендикулярно ее плоскости, установлены рельсы, на которых может перемещаться стол 9, на котором закрепляется заготовка 10. Над заготовкой 10 установлено устройство 11 для подачи охлаждающей жидкости в зону резания.
На фиг. 2 схематично изображен стол 9 станка, который при помощи механизма подъема осуществляет угловую подачу заготовки 10 на резание.
На фиг. 3 показано схематичное изображение станка, который снабжен двумя устройствами передачи движения 8 и 12, одно из которых установлено на секторе 2, обладающей упругоуправляемой связью, и может быть ведомой. Направляющие ролики 6 установлены только на траектории изгиба гибкого бесконечного рабочего органа 1. На схеме показан и ролик 13, обеспечивающий вращение гибкого рабочего органа относительно своей геометрической оси.
На фиг. 4 схематично показан станок, снабженный тремя секторами, причем секторы 3 и 4 конструктивно объединены, а направляющие ролики 6 установлены только на траектории изгиба гибкого бесконечного рабочего органа 1.
Станок работает следующим образом.
Включается система подачи охлаждающей жидкости. При помощи главного привода станка через устройство передачи движения гибкому бесконечному рабочему органу сообщается рабочее движение. Включается подача на резание и после достижения контакта бесконечного рабочего органа с обрабатываемым материалом начинается процесс резки.
Настоящее изобретение может быть использовано при добыче и обработке различных каменных материалов.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО С ГИБКИМ БЕСКОНЕЧНЫМ РАБОЧИМ ОРГАНОМ | 2006 |
|
RU2323822C2 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТВЕРДЫХ МАТЕРИАЛОВ И ЕГО БЕСКОНЕЧНЫЙ РАБОЧИЙ ОРГАН | 2010 |
|
RU2441751C2 |
| СТАНОК ДЛЯ РЕЗКИ ТВЕРДЫХ МАТЕРИАЛОВ | 2001 |
|
RU2193486C1 |
| УСТРОЙСТВО ДЛЯ БУРЕНИЯ НЕФТЯНЫХ И ГАЗОВЫХ СКВАЖИН | 2007 |
|
RU2352749C2 |
| УСТРОЙСТВО ПЕРЕДАЧИ ДВИЖЕНИЯ (ВАРИАНТЫ) | 2000 |
|
RU2167351C1 |
| ПОРШНЕВАЯ МАШИНА | 2001 |
|
RU2187655C1 |
| ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2002 |
|
RU2196236C1 |
| УСТРОЙСТВО РЕЗКИ ТВЕРДЫХ МАТЕРИАЛОВ | 2001 |
|
RU2193485C1 |
| ПИЛА КОЛЬЦЕВАЯ | 1999 |
|
RU2146612C1 |
| МЕМБРАННАЯ КОМПРЕССОРНАЯ УСТАНОВКА | 2016 |
|
RU2630282C1 |

Изобретение относится к области добычи и обработки различных твердых материалов резанием, например камнедобычи и камнеобработки, а более конкретно - к станкам для добычи и обработки камня при помощи бесконечного гибкого рабочего органа. Задачей изобретения является увеличение долговечности рабочего органа, уменьшение энергоемкости и доли отходов готовой продукции. Станок с гибким бесконечным рабочим органом для обработки твердых материалов включает, по меньшей мере, один гибкий бесконечный рабочий орган, подвижно затянутый при помощи затяжного направляющего аппарата, который подвижно закреплен на станине станка, привод подачи на резание, устройство передачи движения гибкому бесконечному рабочему органу, кинематически связанное с главным приводом станка, станину и стол для установки заготовки. Затяжной направляющий аппарат содержит не менее трех секторов, установленных на участках изгиба траектории гибкого бесконечного рабочего органа, на которых по дуге окружности, сопрягающей прямолинейные участки гибкого бесконечного рабочего органа, закреплены с возможностью вращения вокруг своих осей направляющие ролики с кольцевыми пазами. У одного из ближайших от заготовки секторов, по меньшей мере, одна из связей с ближайшим по направлению подачи на резание сектором является упругоуправляемой, а на другом, ближайшем от заготовки секторе, между заготовкой и направляющими роликами установлено устройство передачи движения, в котором подвижно закреплен гибкий бесконечный рабочий орган. Стол станка может иметь механизм для осуществления поворота заготовки в плоскости реза. Между заготовкой и направляющим аппаратом может быть установлен ролик, сдвинутый относительно направления движения гибкого бесконечного рабочего органа. Кольцевые пазы направляющих роликов могут иметь слой антифрикционного покрытия. Устройство передачи движения может быть закреплено шарнирно и может самоустанавливаться по направлению натяжения гибкого бесконечного рабочего органа. Устройство передачи движения может иметь аппарат для создания продольных ультразвуковых колебаний гибкого бесконечного рабочего органа. Упругоуправляемую связь может также иметь сектор, не являющийся ближайшим к заготовке. 6 з. п. ф-лы, 5 ил.
| Установка для канатной распиловки камня | 1982 |
|
SU1065218A1 |
| Исполнительный орган камнерезной машины М.С.Григоряна | 1980 |
|
SU898076A1 |
| Канатная установка для добычи блоков | 1981 |
|
SU1102958A1 |
| Пильная головка камнерезной машины | 1984 |
|
SU1176082A1 |
| СПОСОБ РАЗДЕЛКИ БЛОКА, НАПРИМЕР, ИЗ СТЕКЛА НА ЗАГОТОВКИ | 1972 |
|
SU432108A1 |
| Цепной бар | 1948 |
|
SU83163A1 |
| 0 |
|
SU205678A1 | |
| Канатная пила | 1977 |
|
SU654424A1 |
| SU 916336 А, 30.03.1982 | |||
| БЕСКОНЕЧНАЯ ПИЛА | 0 |
|
SU294746A1 |
| Исполнительный орган камнерезной машины | 1972 |
|
SU492663A1 |
| Камнерезная машина | 1977 |
|
SU617602A1 |
| Бар камнерезной машины | 1979 |
|
SU872762A1 |
| US 5690092 А, 25.11.1997 | |||
| СПОСОБ ОСТЕОСИНТЕЗА ЛОКТЕВОГО ОТРОСТКА | 2013 |
|
RU2530726C1 |
| Дистанционное реле с характеристикой в виде двух прямых линий | 1953 |
|
SU99791A1 |

