Способ относится к радиотехнике, а именно к способам определения местоположения источников радиоизлучения, и может быть использовано для определения местоположения земной станции (ЗС) спутниковой связи (СС) посредством приема и обработки их сигналов, ретранслированных от космических аппаратов (КА), т.е. на земной станции определения местоположения (ЗСОМ).
Известен способ определения местоположения земной станции спутниковой связи (см. Пат. РФ №2653866, МПК G01S 5/06 (2006.01), опубл. 16.05.2018, бюл. №14). Аналог предполагает одновременную регистрацию последовательности отсчетов уровней полезных сигналов ЗС ys(n) и побочных излучений х(n), принимаемых на интервале наблюдения Tн ЗСМО, где n=1,2,…,N, N - номер отсчета с шагом Δt, s=1,2,…, s - номер КА с известными координатами. На основе сравнения ys(n) и х(n) формируют одномерные массивы: As с элементами As(k) - 1, если ys,k<ys,k-1, As(k)=1, если ys,k>ys,k+1, As(k)=0, если ys,k=ys+1 и В с элементами В(k)=1, если xk<xk+1, В(k)=-1, если xk>xk+1, В(k)=0, если xk=xk+1, где k=1, 2,…, N-1. Для каждой пары массивов As и В суммируют полученные значения признаков и определяют количество совпадений элементов с одинаковыми индексами Ws. Местоположение источника побочных излучений (ИПИ) определяют путем привязки к координатам ЗС СС, работающий через КА, подверженный воздействию побочных излучений.
Аналог обеспечивает упрощение реализации с устранением ограничения функциональности на территории с высокой плотностью размещения ЗС при определении местоположения ИПИ.
Способу-аналогу присущи недостатки, ограничивающие его применение. Реализация аналога предполагает наличие информации о точном местоположении легитимных ЗС СС, работающих через один КА. Низкая оперативность измерений обусловлена необходимостью выполнения Q измерений для получения одной координаты. Аналогу присуща низкая помехозащищенность в условиях воздействия помех различной природы.
Известен способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу (см. Пат. РФ №2663193, МПК H04K 3/00 (2003.01), опубл. 02.08.2018, бюл. №22). В способе-аналоге используют земную станцию определения местоположения в составе трех антенн Ант. 1, Ант. 2 и Ант. 3, многоканального когерентного радиоприемника (РПУ) и радиопередатчика (РПД), с помощью которого формируют и излучают тестовый радиосигнал (ТРС) во всей полосе рабочих частот КА, когерентно принимают на интервале времени ΔT с помощью РПУ и запоминают его ретранслированные копии не менее чем от трех космических аппаратов КА 1, КА 2 и КА 3 с известными координатами, находящимися в зоне электромагнитной доступности ЗСМО и ЗС. Сигналы КА через соответствующие им антенны Ант. 1, Ант. 2 и Ант. 3 поступают на соответствующие входы многоканального когерентного РПУ. Компенсируют частотную нестабильность каждого из когерентных каналов многоканального РПУ. Вычисляют наклонную дальность от ЗСМО до КА 1, КА 2 и КА 3, на основе которой корректируют координаты космических аппаратов КА 1, КА 2 и КА 3. Осуществляют когерентный прием ретранслированных копий сигналов от заданной ЗС. Измеряют задержки в приеме сигналов ЗС Дт1,2 и Дт1,3 корреляционным методом с направлений на космические аппараты КА 1, КА 2 и КА 1, КА 3 соответственно. Запоминают полученные значения Δτ1,2 и Δτ1,3. Определяют местоположение ЗС разностно-дальномерным способом (РДС).
Аналог обеспечивает снижение погрешности измерения координат ЗС за счет исключения процедур измерения значений доплеровского сдвига частоты сигнала и связанных с ними процедур измерения угла между пеленгационными базами (ПБ) в выделенных парах пеленгаторных баз.
Однако прототипу присущи недостатки, ограничивающие его применение. Основным из них является низкая помехозащищенность. Имеет место ситуация, когда сигнал ЗС приходит на «основной» КА по главному лепестку диаграммы направленности (ДН) в условиях низкого соотношения сигнал / шум. В качестве одной из причин могут являться преднамеренные помехи (см. Пат. РФ №2707878, H04K 3/00, G01S 5/00, опубл. 02.12.2019, бюл. 34). Другая причина обусловлена неоптимальным в силу разных причин размещениям ЗСОМ относительно местоположения ЗС. Кроме того, появление в заданной части спектра «зеркального» КА легитимного сигнала резко ухудшает сигнально-помеховую обстановку. Сигнал ЗС на КА приходит по боковому лепестку диаграммы направленности (ДН) и значительно уступает по мощности легитимному сигналу КА. Поэтому аналог при их возникновении теряет работоспособность.
Известен способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу (см. Пат. РФ №2755058, МПК H04K 3/00 (2008.01), опубл. 14.09.2021, бюл. №26) В аналоге используют земную станцию определения местоположения в составе трех антенн Ант.1, Ант.2 и Ант.3, многоканального когерентного радиоприемника и радиопередатчика, формируют и излучают с помощью РПД тестовый радиосигнал во всей полосе рабочих частот КА AF, осуществляют когерентный прием РПУ на интервале времени ΔT и запоминают его ретранслированные копии не менее чем от трех космических аппаратов КА 1, КА 2 и КА 3 с известными координатами, находящимися в зоне электромагнитной доступности ЗСМО и ЗС, сигналы КА через соответствующие антенны Ант. 1, Ант. 2 и Ант. 3 поступают на соответствующие входы многоканального когерентного РПУ и используют для компенсации частотной нестабильности каждого из когерентных каналов многоканального РПУ по результатам приема ТРС, вычисляют наклонную дальность от ЗСОМ до КА 1, КА 2 и КА 3, корректируют на их основе координаты космических аппаратов КА 1, КА 2 и КА 3, осуществляют когерентный прием ретранслированных копий сигналов от заданной ЗС, измеряют задержки в приеме сигналов ЗС Δτ1,2 и Δτ1,3 корреляционным методом с направлений на космические аппараты КА 1, КА 2 и КА 1, КА 3 соответственно, запоминают полученные значения Δτ1,2 и Δτ1,3, определяют местоположения ЗС разностно-дальномерным способом. Перед каждым измерением координат ЗС формируют и излучают ТРС в заданной полосе частот ΔFj. Устраняют частотную нестабильность каждого из когерентных каналов. Сравнивают измеренные и запомненные совокупности уровней  сигнала ЗС Wj(ΔFi) и шумов Wjш(ΔFi) каждого j-го КА, j=2,3,
сигнала ЗС Wj(ΔFi) и шумов Wjш(ΔFi) каждого j-го КА, j=2,3,  в полосе частот ΔFi, с совокупностью уровней
в полосе частот ΔFi, с совокупностью уровней  сигнала ЗС W1(ΔFi) и шумов W1ш(ΔFi) в первом, основном КА. В случае превышения порогового уровня Wmin,
сигнала ЗС W1(ΔFi) и шумов W1ш(ΔFi) в первом, основном КА. В случае превышения порогового уровня Wmin,  хотя бы для одного j-го КА выделяют сигнал ЗС S1(ΔFi) в первом КА из совокупности
хотя бы для одного j-го КА выделяют сигнал ЗС S1(ΔFi) в первом КА из совокупности  где
где  S1ш(ΔFi) - распределенный в ΔFi шумовой сигнал и возможные сосредоточенные излучения, формируют его копию с точностью до фазы
S1ш(ΔFi) - распределенный в ΔFi шумовой сигнал и возможные сосредоточенные излучения, формируют его копию с точностью до фазы  с большим уровнем,
с большим уровнем,  и свободной от шумов S1ш(ΔFi), а измерение задержки Δτ1,j выполняют корреляционным методом с использованием в качестве сигнала основного КА
и свободной от шумов S1ш(ΔFi), а измерение задержки Δτ1,j выполняют корреляционным методом с использованием в качестве сигнала основного КА 
При этом выделение сигнала ЗС в первом КА S1(ΔFi) осуществляют с помощью адаптивной фильтрации и последующим выполнением на первом этапе оценки его основных характеристик: рабочей полосы частот, значения несущей частоты, вида модуляции и манипуляции, скорости манипуляции, и на их основе демодуляции сигнала, с последующим восстановлением сигнала ЗС  на втором этапе с точностью до фазы и его усиление до значения, обеспечивающего определение координат ЗС.
на втором этапе с точностью до фазы и его усиление до значения, обеспечивающего определение координат ЗС.
Аналог обеспечивает повышение помехозащищенности измерения координат ЗС за счет выделения из шумов сигнала ЗС в основном КА, анализа, формирования его копии с точностью до фазы с большим уровнем и свободным от шумов и помех с последующим использовании его в РДС.
Однако аналогу присущ недостаток, ограничивающий его применение. На практике не редкими являются ситуации, когда вспомогательные КА могут отсутствовать, или их имеется не более одного. В результате аналог теряет свою работоспособность. Кроме того, техническую сложность представляет восстановление сигнала ЗС S1 (ΔFi) с точностью до фазы.
Наиболее близким по своей технической сущности к заявляемому является способ определения координат земной станции спутниковой связи по ретранслированному сигналу (см. Пат. РФ №2749456, МПК H04K 3/00 (2006.01), опубл. 11.06.2021, бюл. №17), заключающийся в использовании земной станции определения местоположения в составе трех антенн Ант. 1, Ант. 2 и Ант. 3, многоканального когерентного радиоприемника и радиопередатчика (РПД), формировании и излучении РПД тестового радиосигнала во всей полосе рабочих частот КА ΔF и когерентном приеме РПУ на интервале ΔT и запоминании его ретранслированных копий не менее чем от трех космических аппаратов КА 1, КА 2 и КА 3 с известными координатами, находящимися в зоне электромагнитной доступности ЗСОМ и ЗС, сигналы которых через соответствующие антенны Ант. 1, Ант. 2 и Ант. 3 поступают на соответствующие входы многоканального когерентного РПУ, компенсации частотной нестабильности каждого из когерентных каналов многоканального РПУ по результатам приема ТРС, вычислении наклонной дальности от ЗCOM до КА 1, КА 2 и КА 3 с последующей корреляцией на их основе координат КА 1, КА 2 и КА 3, перед каждым очередным измерением координат ЗС формируют и излучают ТРС в заданной полосе частот ΔFi, устраняют текущую частотную нестабильность каждого из когерентных каналов приема, сравнивают заранее измеренные и запомненные шумовые уровни Pj(ΔFi), j=2,3, выбранных j-х КА в полосе частот ΔFi с их текущим уровнем  в случае превышения приращения уровня шумов в j-м КА Pj (ΔFi) порогового уровня Δd, ΔPj>Δd,
в случае превышения приращения уровня шумов в j-м КА Pj (ΔFi) порогового уровня Δd, ΔPj>Δd,  принимают решение о появлении в полосе частот ΔFi сигналов l-й ЗС, ретранслированных j-м КА, выделяют обнаруженные сигналы l-й ЗС S1(ΔFi) j-го КА путем вычитания из совокупности
принимают решение о появлении в полосе частот ΔFi сигналов l-й ЗС, ретранслированных j-м КА, выделяют обнаруженные сигналы l-й ЗС S1(ΔFi) j-го КА путем вычитания из совокупности  сигналов j-го КА:
сигналов j-го КА:  где
где  - совокупность сигналов l-й земной станции, координаты которой подлежат определению, и шумов, измеряют задержки в приеме сигналов ЗС Δτ1,2 и Δτ1,3 корреляционным методом с направлений КС 1, КС 2 и КС 1, КС 3 соответственно, запоминают полученные значения Δτ1,2 и Δτ1,3, определяют местоположение ЗС разностно-дальномерным способом.
- совокупность сигналов l-й земной станции, координаты которой подлежат определению, и шумов, измеряют задержки в приеме сигналов ЗС Δτ1,2 и Δτ1,3 корреляционным методом с направлений КС 1, КС 2 и КС 1, КС 3 соответственно, запоминают полученные значения Δτ1,2 и Δτ1,3, определяют местоположение ЗС разностно-дальномерным способом.
Способ-прототип обеспечивает повышение помехозащищенности измерения координат ЗС за счет использования процедуры выделения помехового сигнала и его вычитания из группового сигнала.
Однако прототипу присущ недостаток, ограничивающий его применение. Во многих практических ситуациях пригодные для измерений вспомогательные КА могут отсутствовать, или их количество не превышает одного. В результате прототип теряет свою работоспособность.
Целью заявляемого технического решения является разработка способа определения местоположения земной станции спутниковой связи по ретранслированному сигналу посредством РДС, обеспечивающего повышение точности ОМ ЗС за счет увеличения пространственно независимой статистики оценивания задержек сигнала Δτ1,N, N>3, и сохранения его работоспособности при отсутствии двух вспомогательных КА.
Поставленная цель достигается тем, что используют земную станцию определения местоположения в составе антенной системы, многоканального когерентного радиоприемного устройства с блоком расчета координат и радиопередатчика; формируют и излучают РПД тестовый радиосигнал в полосе рабочих частот КА ΔF и когерентно принимают РПУ на интервале времени ΔT, запоминают копии сигнала, ретранслированных от КА, находящимися в зоне электромагнитной доступности ЗСОМ, которые через соответствующие антенны антенной системы поступают на соответствующие входы многоканального когерентного РПУ; компенсируют частотную нестабильность каждого из когерентных каналов многоканального РПУ по результатам приема ТРС; вычисляют наклонную дальность от ЗСОМ до КА с последующей коррекцией на их основе координат КА, формируют излучения ТРС в заданной полосе частот ΔFi перед каждым очередным определением координат ЗС, устраняют текущую частотную нестабильности каждого из когерентных каналов приема, сравнивают заранее измеренные и запомненные шумовые уровни Pj(ΔFi), где j - номер КА, в i-той полосе частот ΔFi, ΔFi ∈ ΔF, с их текущим уровнем  в случае превышения приращения уровня шумов в j-ом КА ΔPj(ΔFi) порогового уровня Δdj, ΔPj(ΔFi)>Δdj,
в случае превышения приращения уровня шумов в j-ом КА ΔPj(ΔFi) порогового уровня Δdj, ΔPj(ΔFi)>Δdj,  принимают решение о появлении в полосе частот ΔFi сигналов l-й ЗС, ретранслируемых j-м КА, выделении обнаруженных сигналов l-й ЗС Sl(ΔFi) j-го КА путем вычитания из совокупности
принимают решение о появлении в полосе частот ΔFi сигналов l-й ЗС, ретранслируемых j-м КА, выделении обнаруженных сигналов l-й ЗС Sl(ΔFi) j-го КА путем вычитания из совокупности  сигналов j-го КА:
сигналов j-го КА:  где
где  - совокупность сигналов l-й земной станции, координаты которой подлежат определению, и шумов, измерении задержки в приеме сигналов Δτ1,j корреляционным методом, запоминают полученные значения Δτ1,j и определяют местоположение l-й ЗС разностно-дальномерным способом, дополнительно используют низкоорбитальный космический аппарат (НКА), пункт управления (ПУ) НКА, а ЗСОМ содержит двухканальное когерентное РПУ с блоком расчета координат и антенную систему из двух антенн, одна из которых Ант. 2 автоматически отслеживает направление на НКА, а другая Ант. 1 ориентирована в направлении «основного» КА 1, находящегося на геостационарной орбите и обеспечивающего ретрансляцию сигналов l-й ЗС по основному лепестку диаграммы направленности, на основе нисходящей линии сигналов КА 1 в блоке расчета координат РПУ ЗСОМ осуществляют обнаружение сигналов l-й ЗС, демодуляцию, технический анализ, определение центральной частоты Fi и ширины спектра ΔFi, на основе частотного плана КА 1 определяют частотные параметры Fвi и ΔFвi восходящей линии l-й ЗС, полученные в ЗСОМ значения Fвi и ΔFвi передают на ПУ НКА, в функции которого входит прогноз даты и времени нахождения НКА в зоне электромагнитной доступности (ЭМД) l-й ЗС, ЗСОМ и ПУ, задание НКА по низкоскоростному каналу связи время включения tвкл и выключения tвык ретранслятора, находящегося на его борту, параметры ретранслируемого сигнала Fi, ΔFi и Fвi, ΔFвi, время передачи сообщений на ПУ о текущих координатах НКА (x,y,z,tn), n=1,2,…,N, N - количество сообщений за время пролета над районом поиска, N>3, tn - время измерения координат НКА в n-ой точке, координатно-временные данные НКА последовательно передает на ПУ и далее на ЗСОМ, своевременную ориентацию Ант. 2 на НКА осуществляют по TLE-параметрам его орбиты, устраняют текущую частотную нестабильность приемных каналов РПУ в полосе частот ΔFi в моменты времени tn, при определении координат l-й ЗС НКА осуществляет прием сигналов 1-й ЗС в полосе частот ΔFвi и их ретрансляцию на ЗСОМ в полосе ΔFi, которые через Ант. 2 поступают на второй вход РПУ, одновременно сигналы 1-й ЗС, ретранслированные КА 1, через Ант. 1 поступают на первый вход РПУ, а на основе координат КА 1 и НКА и ретранслированных ими сигналов 1-й ЗС в фиксированные моменты времени tn корреляционным методом определяют N задержек в приеме сигналов Δτ1,N.
- совокупность сигналов l-й земной станции, координаты которой подлежат определению, и шумов, измерении задержки в приеме сигналов Δτ1,j корреляционным методом, запоминают полученные значения Δτ1,j и определяют местоположение l-й ЗС разностно-дальномерным способом, дополнительно используют низкоорбитальный космический аппарат (НКА), пункт управления (ПУ) НКА, а ЗСОМ содержит двухканальное когерентное РПУ с блоком расчета координат и антенную систему из двух антенн, одна из которых Ант. 2 автоматически отслеживает направление на НКА, а другая Ант. 1 ориентирована в направлении «основного» КА 1, находящегося на геостационарной орбите и обеспечивающего ретрансляцию сигналов l-й ЗС по основному лепестку диаграммы направленности, на основе нисходящей линии сигналов КА 1 в блоке расчета координат РПУ ЗСОМ осуществляют обнаружение сигналов l-й ЗС, демодуляцию, технический анализ, определение центральной частоты Fi и ширины спектра ΔFi, на основе частотного плана КА 1 определяют частотные параметры Fвi и ΔFвi восходящей линии l-й ЗС, полученные в ЗСОМ значения Fвi и ΔFвi передают на ПУ НКА, в функции которого входит прогноз даты и времени нахождения НКА в зоне электромагнитной доступности (ЭМД) l-й ЗС, ЗСОМ и ПУ, задание НКА по низкоскоростному каналу связи время включения tвкл и выключения tвык ретранслятора, находящегося на его борту, параметры ретранслируемого сигнала Fi, ΔFi и Fвi, ΔFвi, время передачи сообщений на ПУ о текущих координатах НКА (x,y,z,tn), n=1,2,…,N, N - количество сообщений за время пролета над районом поиска, N>3, tn - время измерения координат НКА в n-ой точке, координатно-временные данные НКА последовательно передает на ПУ и далее на ЗСОМ, своевременную ориентацию Ант. 2 на НКА осуществляют по TLE-параметрам его орбиты, устраняют текущую частотную нестабильность приемных каналов РПУ в полосе частот ΔFi в моменты времени tn, при определении координат l-й ЗС НКА осуществляет прием сигналов 1-й ЗС в полосе частот ΔFвi и их ретрансляцию на ЗСОМ в полосе ΔFi, которые через Ант. 2 поступают на второй вход РПУ, одновременно сигналы 1-й ЗС, ретранслированные КА 1, через Ант. 1 поступают на первый вход РПУ, а на основе координат КА 1 и НКА и ретранслированных ими сигналов 1-й ЗС в фиксированные моменты времени tn корреляционным методом определяют N задержек в приеме сигналов Δτ1,N.
Заявляемый способ поясняется чертежами:
на фиг. 1 показаны условия, когда в зоне электромагнитной доступности ЗС и ЗСОМ находятся два космических аппарата КА 1 на геостационарной орбите и КА 2 на низкоорбитальной орбите;
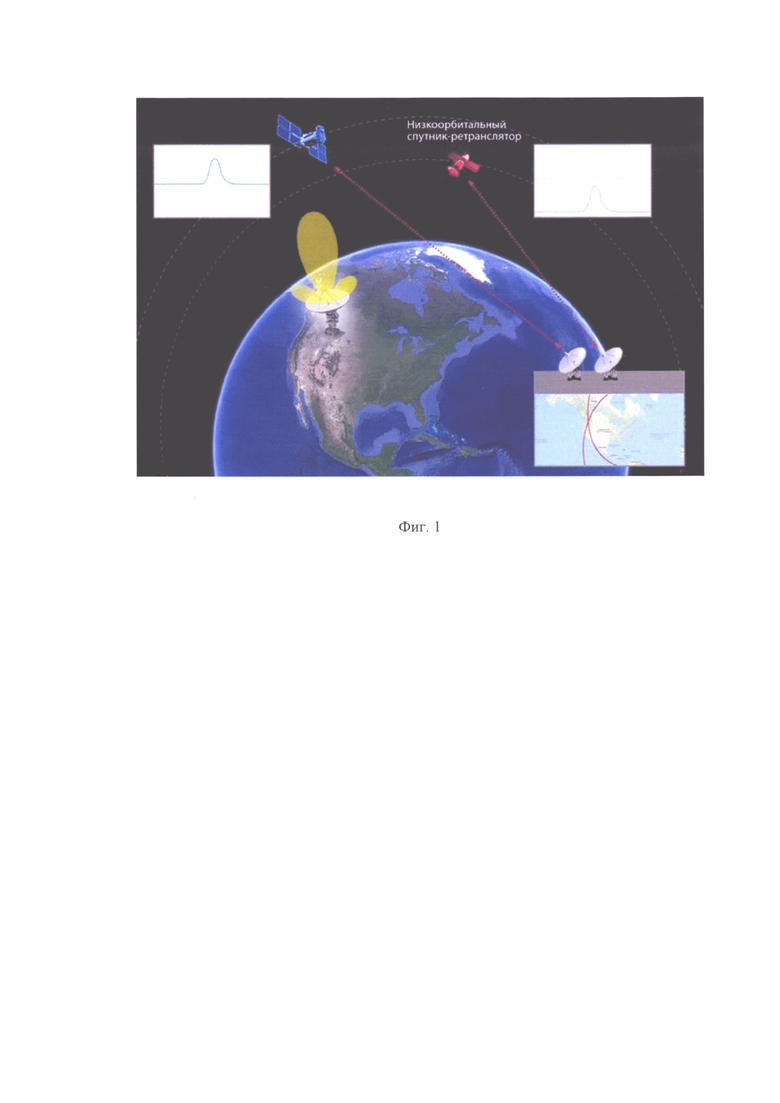
на фиг. 2 приведен обобщенный алгоритм определения местоположения земной станции спутниковой станции по ретранслированному сигналу;
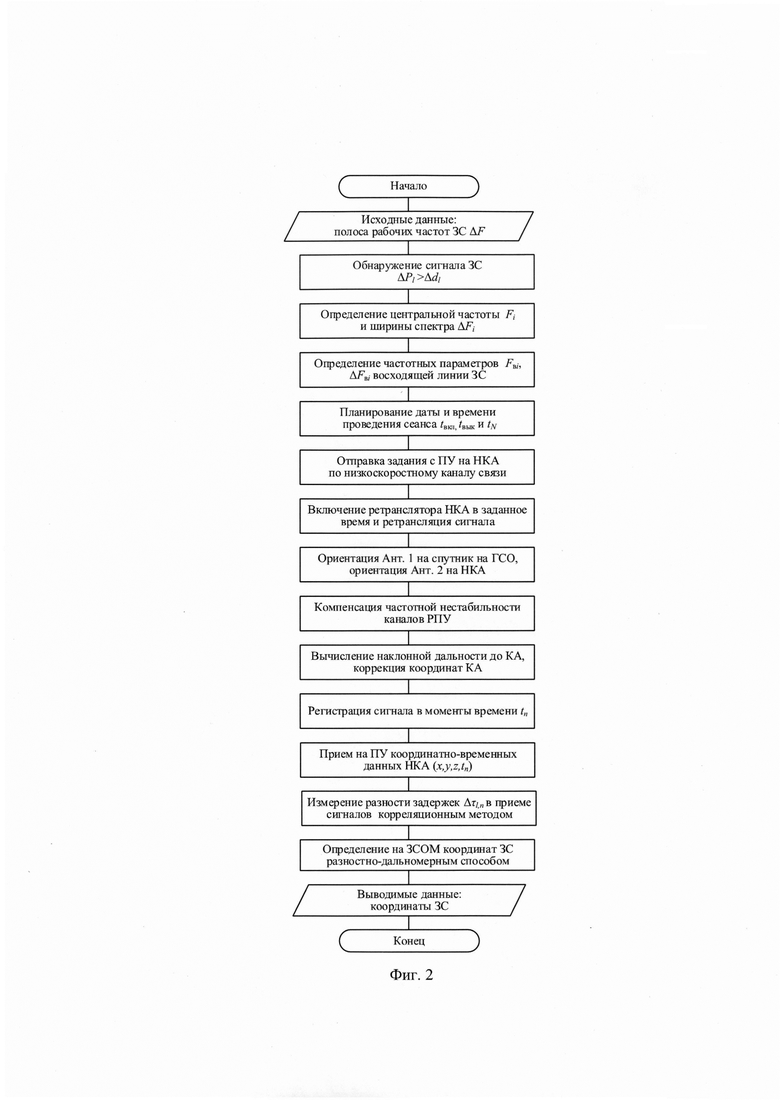
на фиг. 3 показан внешний вид НКА на базе CubeSat;
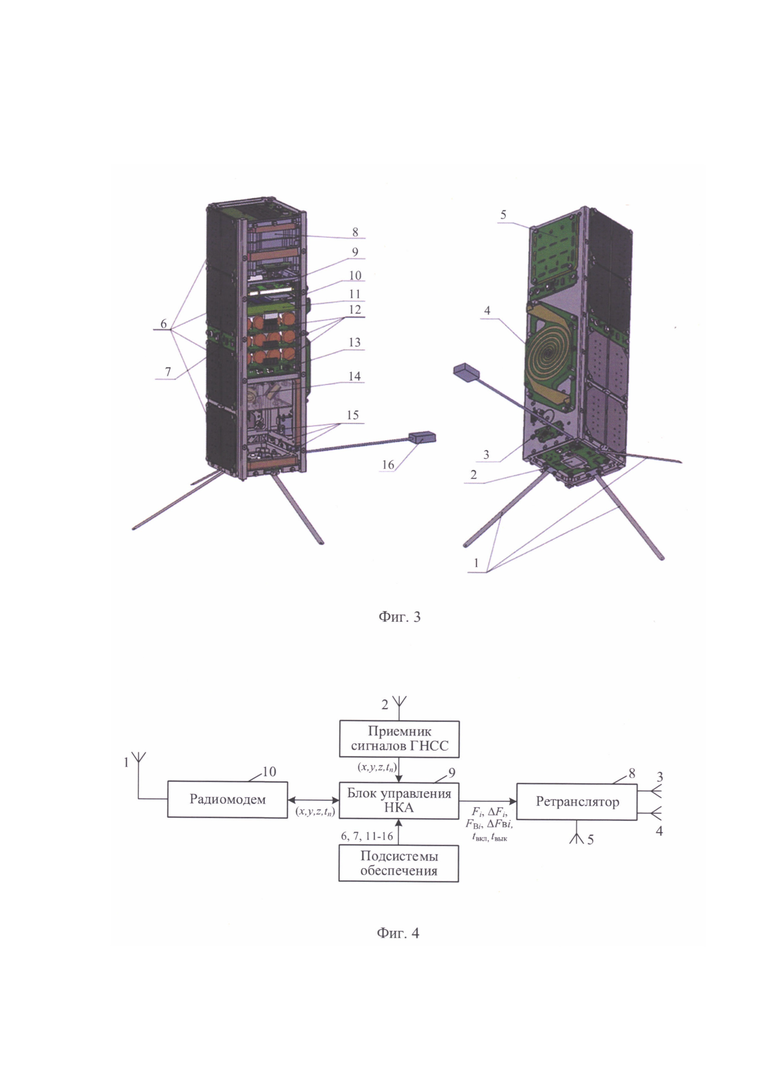
на фиг. 4 приведена обобщенная структурная схема НКА;
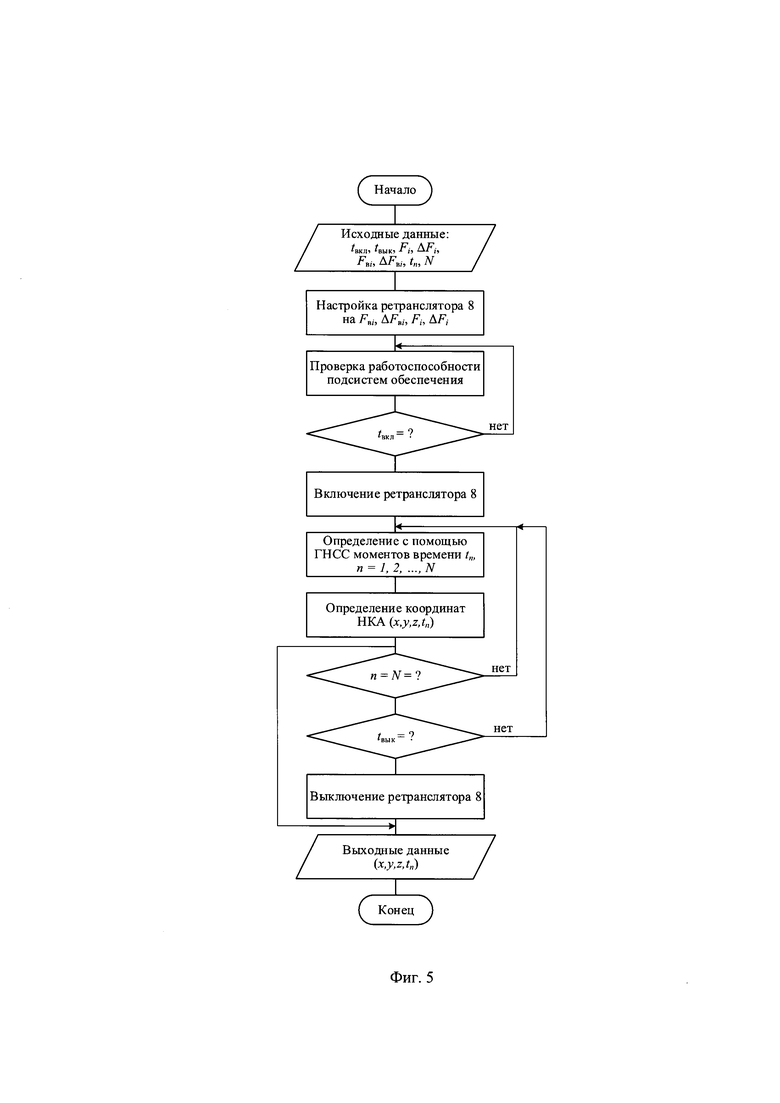
на фиг. 5 приведен обобщенный алгоритм функционирования НКА;
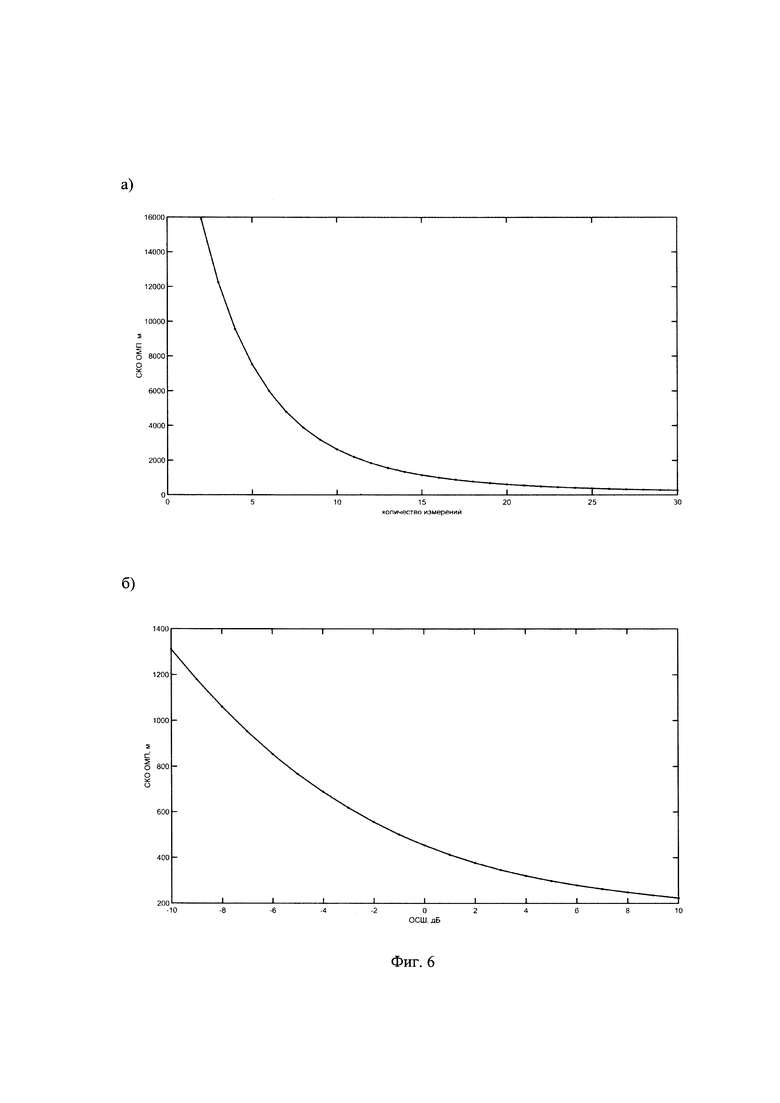
на фиг. 6 показаны результаты моделирования предлагаемого способа:
а) зависимость среднеквадратического отклонения (СКО) ошибки местоопределения источника радиоизлучения (ЗС) от количества измерений N;
б) зависимость СКО ошибки местоопределения ЗС от соотношения сигнал/шум в НКА;
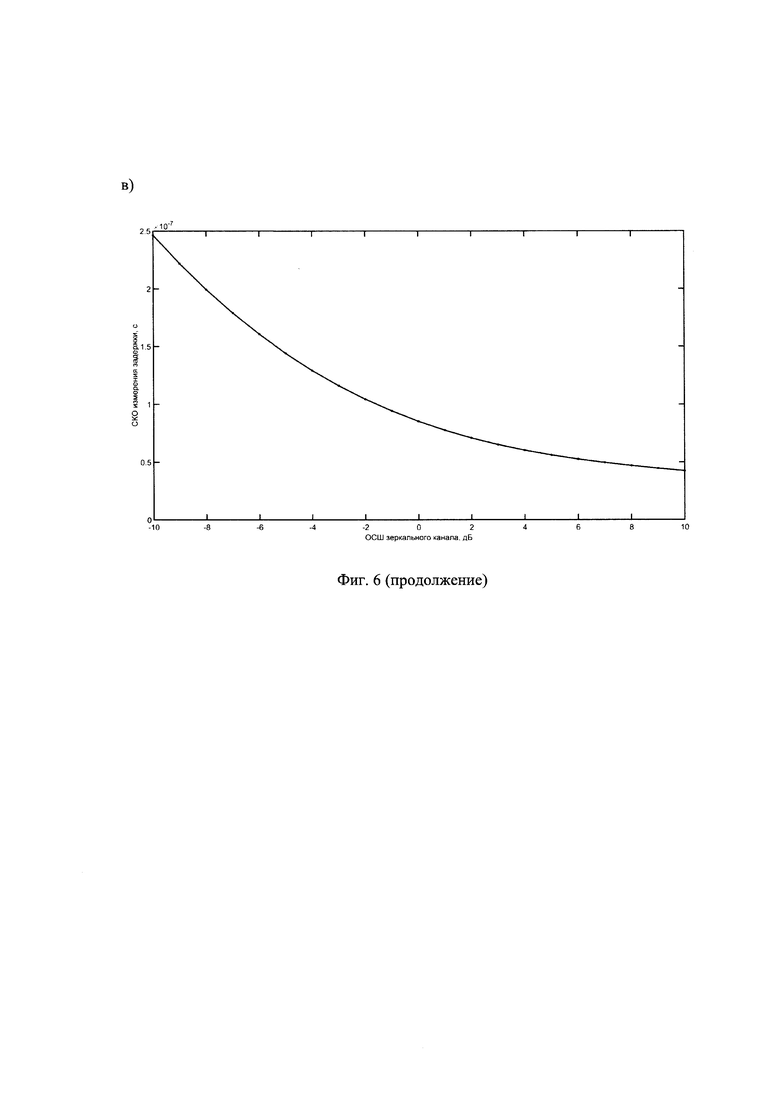
в) зависимость СКО ошибки в измерении задержки от соотношения сигнал/шум в НКА.
Сущность предлагаемого способа состоит в следующем. В настоящее время широкое распространение получили системы геолокации, использующие три и более КА при определении местоположения земной станции. Для их функционирования необходимо выполнение ряда требований. К последним относятся: наличие как минимум двух дополнительных спутников-ретрансляторов («зеркальных» КА), которые имеют одинаковые частоты восходящих линий связи, поляризацию антенной системы и зону покрытия. Кроме того, требуется знание точного местоположения задействованных в измерениях КА.
Мультимедийная архитектура определения местоположения ЗС предполагает использование разностно-дальномерного, разностно-доплеровского способов или их комбинаций (см. Char М. Application of a dual satellite geolocation system on locating sweeping interference//World Academy of Science, Engineering Technology. -2012. T. 6, #9, p. 1029-1034).
Спутник-ретранслятор КА 1 является «основным», так как он обеспечивает ретрансляцию сигнала l-й ЗС по основному лепестку ДН. В аналогах и прототипе второй и третий КА являются смежными, находятся на некотором удалении от КА 1 и способны передавать то же излучение, полученное по боковым лепесткам ДН ЗС, но с большим затуханием. Если ЗСОМ находится в зоне ЭМД, формируемой антенными системами названных КА, то ее многоканальное РПУ сможет принимать сигналы от этих КА, их дальнейшую обработку и определение координат ЗС. В то же время, не редкими являются ситуации, когда вспомогательные космические аппараты КА 2 и КА 3 могут отсутствовать, или их существует не более одного. Данную проблему предлагается решить с помощью низкоорбитального космического аппарата с размещенным на его борту ретранслятором сигналов. На фиг. 1 приведен вариант такого решения, когда сигналы источника ретранслируются парой: КА 1 на геостационарной орбите и НКА. Движение НКА позволяет проводить последовательные во времени измерения Δτ1,n, n=1,2,…,N, с получением не только линий положения, но и координат ЗС. В качестве НКА целесообразно использовать Кубсат (англ. CubeSat ← cube + satellite) - формат малых (сверхмалых) искусственных спутников Земли, имеющих габариты 10×10×10 см при массе не более 1,33 кг (см. электронный ресурс https://www.webcitation.org/6ABSpR8qR?url=http://www.cubesat.org/images/developers/cds_rev12.pdf. Обр. 6.05.2024 г.).
На подготовительном этапе (см. фиг. 1, 2) с помощью РПД излучают шумоподобный тестовый радиосигнал в полосе рабочих частот КА AF и принимают его первым каналом РПУ на интервале времени ΔT, компенсируют частотную нестабильность первого канала РПУ по результатам приема ТРС. Используемая при этом низкая мощность ТРС не оказывает деструктивного воздействия на работу системы спутниковой связи. С помощью этого реперного сигнала определяют или уточняют частотный план спутника (частоты восходящего канала по наблюдаемым частотам нисходящего канала). Реализация этих процедур известна (см. Пат. РФ №2172495, МПК G01S 5/00 (2000.01), G01S 5/06 (2000.01), опубл. 20.08.2001, бюл. №23; Волков Р.В. и др. Основы построения и функционирования разностно-дальномерных систем координатометрии источников радиоизлучения. - СПб: ВАС, 2003. - 116 с.). В свою очередь, определение зон ЭМД, формируемых антенными системами КА, известно (см. Челышев В.Д., Якимовец В.В. Радиоэлектронные системы административного и военного управления. Часть первая. Радиоинтерфейсы систем мобильного радиосервиса: Учебник. - СПб: ВАС, 2006. - 576 с.). Вычисляют наклонную дальность D1=с⋅Δτ1/2 от ЗСОМ до КА 1, находящегося на геостационарной орбите с последующей коррекцией на ее основе координат КА 1. Здесь Δτ1 - измеренное значение задержки принятого после ретрансляции ТРС через КС 1, с - скорость света. Далее осуществляют обнаружение сигналов 1-й ЗС путем сравнения заранее измеренных и запомненных шумовых уровней P1(ΔFi) в полосе частот ΔFi, ΔFi ∈ ΔF, с их текущим уровнем Р1,тек(ΔFi). В случае превышения уровня шумов в КА 1 ΔP1 (ΔFi) порогового уровня Δd1, ΔP1(ΔFi)>Δd1, ΔР1(ΔFi)=P1,тек(ΔFi)-P1(ΔFi), принимают решение о появлении в полосе частот ΔFi сигналов l-й ЗС, ретранслируемых КА 1.
Далее выделяют обнаруженный сигнал 1-й ЗС КА 1:

где 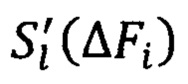 - совокупность сигналов l-й ЗС, координаты которой подлежат определению, и шумов. На его основе выполняют оценку характеристик Sl(ΔFi): рабочей полосы частот ΔFi, значения несущей частоты Fi, вида модуляции и манипуляции, скорости манипуляции.
- совокупность сигналов l-й ЗС, координаты которой подлежат определению, и шумов. На его основе выполняют оценку характеристик Sl(ΔFi): рабочей полосы частот ΔFi, значения несущей частоты Fi, вида модуляции и манипуляции, скорости манипуляции.
На основе полученных значений ΔFi и Fi по частотному плану определяют характеристики сигналов восходящей линии l-й ЗС Fвi и ΔFвi, что необходимо для постановки задачи геолокации НКА.
Планирование сеанса геолокации включает следующее. На основе TLE-параметров (см. Приложение) орбиты НКА определяют дату и время его нахождения в зоне ЭМД 1-й ЗС, время включения tвкл и выключения tвык ретранслятора НКА, параметры ретранслируемых сигналов Fi, ΔFi и Fвi, ΔFвi, время передачи сообщений на ПУ о текущих координатах НКА (x,y,z,tn), n=1,2,…,N, N-количество сообщений за время пролета над районом поиска, tn - время измерения координат НКА в n-й точке. Названные величины из ЗСОМ поступают на ПУ и далее по низкоскоростному каналу связи на борт НКА. Параметры НКА (х, у, z, tn) также используют для своевременной ориентации Ант. 2.
В интересах повышения точности измерения координат ЗС по аналогии с прототипом в моменты времени tn корректируют значения наклонной дальности от ЗСОМ до КА 1 и НКА, компенсируют частотные нестабильности когерентных каналов двухканального РПУ. С этой целью формируют шумоподобный ТРС с известными параметрами и излучают посредством РПД. При этом мощность ТРС РТРС меньше P1 (ΔFi) и РНКА(ΔFi). После его ретрансляции от КА 1 и НКА посредством Ант. 1 и Ант. 2 принимают когерентным РПУ и с помощью процедур корреляции (излученного ТРС с его принятыми ретранслированными копиями) вычисляют величины задержек, характеризующих наклонную дальность от ЗСОМ до соответствующих КА 1 и НКА.
Наклонную дальность D между ЗСОМ и КА рассчитывают по формуле

где Δτ - рассчитанное значение задержки принятого после ретрансляции ТРС через соответствующий КА, с - скорость света. Кроме того, по результатам искажений принятых версий ретранслированного ТРС, полученных в результате прохождения соответствующих трактов приема РПУ, выполняют коррекцию амплитудно-частотных характеристик каждого из приемных каналов в полосе частот ΔFi. Реализация этих процедур известна (см. Пат. РФ №2172495, МПК G01S 5/00 (2000.01), G01S 5/06 (2000.01) опубл. 20.08.2001, бюл. №23).
В течение интервала времени ΔT осуществляют прием ретранслированных от КА 1 и НКА сигналов 1-й ЗС и определение в момент времени tn корреляционным методом задержки сигнала Δτ1,n. Для нахождения последней используют уточненные координаты КА 1 и НКА.
В следующий tn+1 момент времени процедуры по тестированию приемных трактов, уточнению координат КА 1 и НКА и измерению задержек Δτ1,n+1 повторяют. В результате пролета НКА над районом поиска получают N значений задержек сигнала Δτ1,N, N>3, что позволяет повысить точность определения координат l-й ЗС. Определение местоположения ЗС РДС выполняют аналогично способу-прототипу. Для этого используют известный способ координатометрии (см. Дворников С.В., Саяпин В.Н., Симонов А.Н. Теоретические основы координатометрии источников радиоизлучений. - СПб: ВАС, 2007). Последний включает этапы:
измерение одного из координатно-информационных параметров (КИП) радиосигналов ЗС, ретранслированных КА;
определение параметров положения, соответствующих каждому КИП;
построение линий (поверхностей) положения по его параметрам;
определение местоположения ЗС на поверхности линий (поверхностей) положения.
Физические координаты ЗС находят из системы уравнений, приведенной в Пат. РФ №2663193, стр. 6, решение которой известно (см. Севидов В.В. Варианты реализации разностно-дальномерного метода определения координат земных станций по сигналам спутников-ретрансляторов // Радиотехника, электроника и связь (РЭ и С - 2015). Международная научно-техническая конференция. - СПб.: ВАС, 2015. с 303-308).
На фиг. 3 показан внешний вид НКА. Последний содержит антенную систему в составе: UHF-антенна 1, антенна глобальной навигационной спутниковой системы 2, антенна диапазона 6-18 ГГц 3, антенна диапазона 0,8-6 ГГц 4, антенна Х-диапазона 5, солнечная панель 6, блок датчиков пространственной ориентации 7, модуль ретранслятора 8, блок управления НКА (бортовой компьютер) 9, радиомодем 10, блок питания 11, аккумуляторные батареи 12, блок управления маховиками и магнитными катушками 13, блок маховиков 14, блок магнитных катушек 15 и магнитометр 16. Обобщенная структурная схема НКА приведена на фиг. 4, а на фиг. 5 - обобщенный алгоритм его функционирования.
Низкоорбитальный космический аппарат работает следующим образом. Разработанный на ЗСОМ план геолокации поступает на ПУ и далее по низкоскоростному каналу связи на борт НКА. Последний содержит следующие данные: время включения tвкл и выключения ретранслятора 8, рабочие частоты ретранслятора 8 по линии вверх Fвi, ΔFвi и линии вниз Fi, ΔFi, фиксированные моменты времени tn определения собственных координат НКА и их количество N. Данные геолокации принимаются антенной 1 и радиомодемом 10 и поступают на вход блока управления НКА 9. Блок 9 формирует управляющую команду ретранслятору 8. В результате блок 8 настраивает приемный тракт на полосу частот ΔFвi с центральной частотой Fвi, а передающий тракт на частоты ΔFi, Fi. При достижении времени tвкл ретранслятор 8 включается и осуществляет ретрансляцию сигналов l-й ЗС. При достижении очередного фиксированного момента времени tn, n ∈ N, c помощью сигналов ГНСС определяют координаты НКА (х, у, z, tn). Эти данные могут сразу (последовательно) по низкоскоростному каналу связи через блоки 10, 1 НКА, ПУ передаваться на ЗСОМ или накапливается на борту НКА. В последнем случае они поступают на ЗСОМ после пролета НКА над контролируемым районом. В течение времени между tвкл и tвык выполняют N операций по определению координат НКА. При достижении времени tвык ретранслятор 10 выключается.
В процессе полета НКА осуществляется контроль работоспособности всех подсистем обеспечения, результаты которого периодически доводятся до ЗCOM по низкоскоростному каналу связи. ПУ КА выполняет при этом роль ретранслятора сигналов ЗСОМ и НКА.
Оценка эффективности предлагаемого способа выполнена на основе моделирования в среде Матлаб (см. фиг. 6а, б, в). При моделировании использован UHF-диапазон (225-400 МГц). Частота сигнала Fi=263,625 МГц, ΔFi=30 кГц, непрерывно несущая. В качестве основного (КА 1) выбран спутник Intelsat 22 (NORAD 38098), а НКА представлен Кубсат (NORAD 57202). Источником сигнала является ЗС с координатами [60,30,0] г. Санкт-Петербург. Длительность геолокации 5 мин, время проведения 23.05.2024 19:20:00-19:25:00 (UTC +3). Количество измерений N=30 (через интервал времени 10 с), интервал анализа 1 с. Отношение сигнал / шум в основном канале приема составило 10 дБ, в канале приема НКА 7 дБ.
На фиг. 6а представлена зависимость СКО ошибки местоопределения ЗС от количества измерений N. Последний свидетельствует о том, что при N>20 ошибка в определении координат, оцениваемая СКО, составляет сотни метров. Положительный результат в предлагаемом способе достигается благодаря формированию N эллипсов, проходящих через точку с искомыми координатами ЗС под разными углами, часть из которых является наиболее информативными (близким к взаимному углу в 90°). В способе-прототипе формируют два эллипса, пересекающиеся под углом, далеком от 90°. Подобрать другие КА для улучшения геометрии вычислений как правило не представляется возможным.
На фиг. 6б представлена зависимость СКО ошибки местоопределения ЗС от ОСШ в НКА. Последний свидетельствует о существенной зависимости СКО от ОСШ. В связи с тем, что на НКА обеспечивается лучшее ОСШ по сравнению с этим показателем на вспомогательных спутниках КА 2 и КА 3 способа-прототипа в предлагаемом способе достигается положительный эффект по точности определения координат ЗС. Причиной является разная дистанция связи для НКА и КА на геостационарной орбите.
На фиг. 6в приведена зависимость СКО ошибки в измерении задержки сигнала от ОСШ на НКА. Уменьшение ОСШ влечет за собой существенные погрешности в измерении задержки сигнала, как следствие - к ошибкам в определении местоположения ЗС.
Таким образом, предлагаемый способ сохраняет свою работоспособность в условиях отсутствия двух вспомогательных КА и обеспечивает повышение точности определения местоположения ЗС за счет увеличения пространственно некоррелируемой статистики измерения задержки сигналов Δτ1,N, N >> 2.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2024 |
|
RU2837386C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2020 |
|
RU2755058C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2020 |
|
RU2749456C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ ПО РЕТРАНСЛИРОВАННОМУ СИГНАЛУ | 2017 |
|
RU2663193C1 |
| Способ и устройство активной радиомаскировки местоположения земной станции | 2019 |
|
RU2707878C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОГО ТЕРМИНАЛА С ПОМОЩЬЮ СПУТНИКА-РЕТРАНСЛЯТОРА НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 2017 |
|
RU2679890C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ АБОНЕНТСКОГО ТЕРМИНАЛА С ПОМОЩЬЮ НЕ МЕНЕЕ ДВУХ СПУТНИКОВ-РЕТРАНСЛЯТОРОВ НА НИЗКОЙ ОКОЛОЗЕМНОЙ ОРБИТЕ | 2017 |
|
RU2684740C1 |
| Способ искажения радиолокационного изображения в космической радиолокационной станции с синтезированной апертурой антенны | 2016 |
|
RU2622904C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ | 2010 |
|
RU2442996C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСТОЧНИКОВ РАДИОИЗЛУЧЕНИЯ | 2019 |
|
RU2734108C1 |
Изобретение относится к радиотехнике, а именно к способам определения местоположения (ОМП) источника радиоизлучения, и может быть использовано для ОМП земных станций (ЗС) спутниковой связи. Технический результат состоит в повышении точности ОМП ЗС за счет увеличения пространственно независимой статистики оценивания задержек сигнала Δτ1,N, N>3, и сохранения его работоспособности при отсутствии двух вспомогательных космических аппаратов (КА). Упомянутый технический результат достигается тем, что дополнительно используют низкоорбитальный космический аппарат (НКА), пункт управления (ПУ) НКА, а земную станцию определения местоположения (ЗСОМ) выполняют содержащей двухканальное когерентное радиоприемное устройство (РПУ) с блоком расчета координат и антенную систему из двух антенн, одна из которых автоматически отслеживает направление на НКА, а другая ориентирована в направлении «основного» КА, находящегося на геостационарной орбите и обеспечивающего ретрансляцию сигналов ЗС по основному лепестку диаграммы направленности, на основе нисходящей линии сигналов КА в ЗСОМ осуществляют обнаружение сигналов ЗС, демодуляцию, технический анализ, определение центральной частоты Fi и ширины спектра ΔFi, на основе частотного плана КА определяют частотные параметры FBi и ΔFBi восходящей линии ЗС, полученные значения FBi и ΔFBi передают на ПУ НКА, в функции которого входит прогноз даты и времени нахождения НКА в зоне электромагнитной доступности ЗС, ЗСОМ и ПУ, задание НКА времени включения tвкл и выключения tвык ретранслятора, находящегося на его борту, параметры ретранслируемого сигнала Fi, ΔFi и Fвi, ΔFв£, время передачи сообщений на ПУ о текущих координатах НКА (х, у, z, tn), n=1, 2, …, N, N - количество сообщений за время пролета над районом поиска, N>3, своевременную ориентацию антенны ЗСОМ на НКО осуществляют по TLE-параметрам его орбиты, устраняют текущую частотную нестабильность приемных каналов РПУ в полосе ΔFi в момент времени tn, на основе координат КА и НКА и ретранслированных ими сигналов ЗС в фиксированные моменты времени tn корреляционным методом определяют N задержек в приеме сигналов Δτ1,N и далее разностно-дальномерным способом находят координаты ЗС. 6 ил.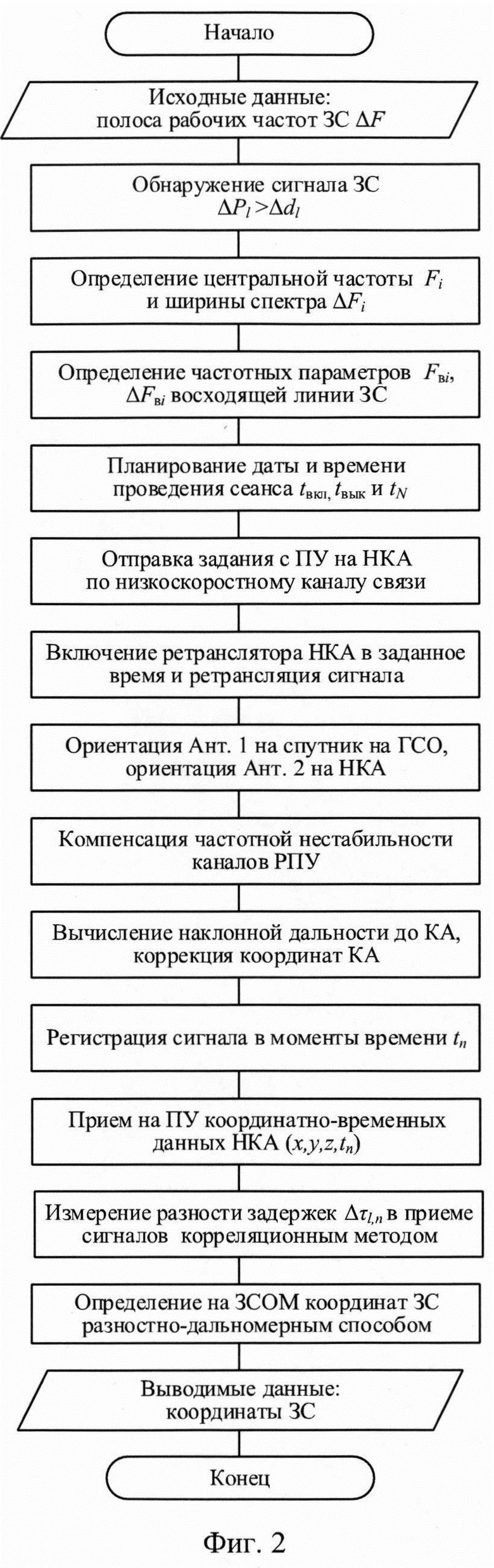
Способ определения местоположения земной станции (ЗС) спутниковой связи (СС) по ретранслированному сигналу от космических аппаратов (КА), заключающийся в использовании земной станции определения местоположения (ЗСОМ) в составе антенной системы, многоканального когерентного радиоприемного устройства (РПУ) с блоком расчета координат и радиопередатчика (РПД); формировании и излучении РПД тестового радиосигнала (ТРС) в полосе рабочих частот КА ΔF и когерентном приеме РПУ на интервале времени ΔT, запоминании копий сигнала, ретранслированных от КА, находящимися в зоне электромагнитной доступности ЗСОМ, которые через соответствующие антенны антенной системы поступают на соответствующие входы многоканального когерентного РПУ; компенсации частотной нестабильности каждого из когерентных каналов многоканального РПУ по результатам приема ТРС; вычислении наклонной дальности от ЗСОМ до КА с последующей коррекцией на их основе координат КА, формировании излучений ТРС в заданной полосе частот ΔFi перед каждым очередным определением координат ЗС, устранении текущей частотной нестабильности каждого из когерентного каналов приема, сравнении заранее измеренных и запомненных шумовых уровней Pj(ΔFi), где j - номер КА в i-й полосе частот ΔFi, ΔFi ∈ ΔF, с их текущим уровнем  в случае превышения приращения уровня шумов в j-м КА ΔPj(ΔFi) порогового уровня
в случае превышения приращения уровня шумов в j-м КА ΔPj(ΔFi) порогового уровня  принятии решения о появлении в полосе частот ΔFi сигналов l-й ЗС, ретранслируемых j-м КА, выделении обнаруженных сигналов l-й ЗС Sl(ΔFi) j-го КА путем вычитания из совокупности
принятии решения о появлении в полосе частот ΔFi сигналов l-й ЗС, ретранслируемых j-м КА, выделении обнаруженных сигналов l-й ЗС Sl(ΔFi) j-го КА путем вычитания из совокупности  сигналов j-го КА:
сигналов j-го КА: 
 где
где  - совокупность сигналов l-й земной станции, координаты которой подлежат определению, и шумов, измерении задержки в приеме сигналов Δτ1,j корреляционным методом, запоминании полученных значений Δτ1,j и определении местоположения l-й ЗС разностно-дальномерным способом, отличающийся тем, что дополнительно используют низкоорбитальный космический аппарат (НКА), пункт управления (ПУ) НКА, а ЗСОМ содержит двухканальное когерентное РПУ с блоком расчета координат и антенную систему из двух антенн, одна из которых Ант. 2 автоматически отслеживает направление на НКА, а другая Ант. 1 ориентирована в направлении «основного» КА 1, находящегося на геостационарной орбите и обеспечивающего ретрансляцию сигналов l-й ЗС по основному лепестку диаграммы направленности, на основе нисходящей линии сигналов КА 1 в блоке расчета координат РПУ ЗСОМ осуществляют обнаружение сигналов 1-й ЗС, демодуляцию, технический анализ, определение центральной частоты Ft и ширины спектра ΔFi, на основе частотного плана КА 1 определяют частотные параметры Fвi и ΔFвi восходящей линии 1-й ЗС, полученные в ЗСОМ значения Fвi и ΔFвi передают на ПУ НКА, в функции которого входит прогноз даты и времени нахождения НКА в зоне электромагнитной доступности (ЭМД) l-й ЗС, ЗСОМ и ПУ, задание НКА по низкоскоростному каналу связи времени включения tвкл и выключения tвык ретранслятора, находящегося на его борту, параметры ретранслируемого сигнала Fi, ΔFi и Fвi, ΔFвi, время передачи сообщений на ПУ о текущих координатах НКА (x,y,z,tn), n=1, 2, …, N, N - количество сообщений за время пролета над районом поиска, N>3, tn - время измерения координат НКА в n-й точке, координатно-временные данные НКА последовательно передает на ПУ и далее на ЗСОМ, своевременную ориентацию Ант. 2 на НКА осуществляют по TLE-параметрам его орбиты, устраняют текущую частотную нестабильность приемных каналов РПУ в полосе частот ΔFi в моменты времени tn, при определении координат l-й ЗС НКА осуществляет прием сигналов 1-й ЗС в полосе частот ΔFвi и их ретрансляцию на ЗСОМ в полосе ΔFi, которые через Ант. 2 поступают на второй вход РПУ, одновременно сигналы 1-й ЗС, ретранслированные КА 1, через Ант. 1 поступают на первый вход РПУ, а на основе координат КА 1 и НКА и ретранслированных ими сигналов 1-й ЗС в фиксированные моменты времени tn корреляционным методом определяют N задержек в приеме сигналов Δτ1,N.
- совокупность сигналов l-й земной станции, координаты которой подлежат определению, и шумов, измерении задержки в приеме сигналов Δτ1,j корреляционным методом, запоминании полученных значений Δτ1,j и определении местоположения l-й ЗС разностно-дальномерным способом, отличающийся тем, что дополнительно используют низкоорбитальный космический аппарат (НКА), пункт управления (ПУ) НКА, а ЗСОМ содержит двухканальное когерентное РПУ с блоком расчета координат и антенную систему из двух антенн, одна из которых Ант. 2 автоматически отслеживает направление на НКА, а другая Ант. 1 ориентирована в направлении «основного» КА 1, находящегося на геостационарной орбите и обеспечивающего ретрансляцию сигналов l-й ЗС по основному лепестку диаграммы направленности, на основе нисходящей линии сигналов КА 1 в блоке расчета координат РПУ ЗСОМ осуществляют обнаружение сигналов 1-й ЗС, демодуляцию, технический анализ, определение центральной частоты Ft и ширины спектра ΔFi, на основе частотного плана КА 1 определяют частотные параметры Fвi и ΔFвi восходящей линии 1-й ЗС, полученные в ЗСОМ значения Fвi и ΔFвi передают на ПУ НКА, в функции которого входит прогноз даты и времени нахождения НКА в зоне электромагнитной доступности (ЭМД) l-й ЗС, ЗСОМ и ПУ, задание НКА по низкоскоростному каналу связи времени включения tвкл и выключения tвык ретранслятора, находящегося на его борту, параметры ретранслируемого сигнала Fi, ΔFi и Fвi, ΔFвi, время передачи сообщений на ПУ о текущих координатах НКА (x,y,z,tn), n=1, 2, …, N, N - количество сообщений за время пролета над районом поиска, N>3, tn - время измерения координат НКА в n-й точке, координатно-временные данные НКА последовательно передает на ПУ и далее на ЗСОМ, своевременную ориентацию Ант. 2 на НКА осуществляют по TLE-параметрам его орбиты, устраняют текущую частотную нестабильность приемных каналов РПУ в полосе частот ΔFi в моменты времени tn, при определении координат l-й ЗС НКА осуществляет прием сигналов 1-й ЗС в полосе частот ΔFвi и их ретрансляцию на ЗСОМ в полосе ΔFi, которые через Ант. 2 поступают на второй вход РПУ, одновременно сигналы 1-й ЗС, ретранслированные КА 1, через Ант. 1 поступают на первый вход РПУ, а на основе координат КА 1 и НКА и ретранслированных ими сигналов 1-й ЗС в фиксированные моменты времени tn корреляционным методом определяют N задержек в приеме сигналов Δτ1,N.
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2020 |
|
RU2749456C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ ПО РЕТРАНСЛИРОВАННОМУ СИГНАЛУ | 2000 |
|
RU2172495C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ ПО РЕТРАНСЛИРОВАННОМУ СИГНАЛУ | 2017 |
|
RU2663193C1 |
| Способ определения местоположения земной станции спутниковой связи по ретранслированному сигналу | 2020 |
|
RU2755058C1 |
| Способ определения местоположения земной станции спутниковой связи | 2017 |
|
RU2640395C1 |
| Способ определения местоположения земной станции спутниковой связи | 2017 |
|
RU2653866C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ЗЕМНОЙ СТАНЦИИ СПУТНИКОВОЙ СВЯЗИ | 2010 |
|
RU2442996C1 |
| 0 |
|
SU127199A1 | |
| US 6166687 A, 26.12.2000. | |||

