Пневмогидропривод предназначен для использования в системах автоматики в качестве исполнительного устройства, осуществляющего управляемое перемещение объектов, и/или создания управляемых силовых воздействий на объекты. В частности пневмогидропривод может быть использован в робототехнике в качестве устройства, осуществляющего управляемые движения манипуляторов роботов.
Известен односторонний мембранный пневмопривод с возвратными пружинами, содержащий проточную полость, соединенную через входной трубопровод и входной управляемый клапан с источником рабочего тела и через выходной трубопровод и выходной управляемый клапан с приемником рабочего тела, а также мембрану, соединенную с выходным штоком и возвратной пружиной [Бендер X. Пневмопривод с возвратными пружинами. (Bender Н. Druckmittelgesteuerter Antrieb mit gekapselten Federn). - Заявка ФРГ №4305631.8, МПК5 F15В 15/10, заявл. 24.2.93, опубл. 25.8.94. - DB.].
К недостаткам известного пневмопривода можно отнести относительно низкое развиваемое усилие на выходном штоке привода при заданных ограничениях на габариты устройства и входное давление рабочего тела, что не позволяет использовать его без дополнительных механизмов в качестве, например, привода работа.
Из известных пневмогидроприводов наиболее близким по технической сущности заявляемому (прототипом) является сильфонный пневмогидропривод с внутренним подводом жидкости или газа, содержащий первое и второе основания, проточную полость, выполненную в виде сильфона, соединенную через входной трубопровод и входной управляемый клапан с источником рабочего тела и через выходной трубопровод и выходной управляемый клапан с приемником рабочего тела [Пневматические устройства и системы: Справочник / Е.В.Герц, А.И.Кудрявцев, О.В.Ложкин и др. Под ред. Е.В.Герца. - М.: Машиностроение, 1981. - 408 с.].
К недостаткам известного пневмогидропривода также можно отнести невысокое развиваемое усилие на выходном штоке.
Задача изобретения - повышение величины развиваемого усилия на выходном штоке привода при заданных ограничениях на габариты устройства и входное давление рабочего тела.
Указанная задача решается тем, что в пневмогидропривод, содержащий первое и второе основания, проточную полость, соединенную через входной трубопровод и входной управляемый клапан с источником рабочего тела и через выходной трубопровод и выходной управляемый клапан с приемником рабочего тела, введена первая группа из двух или более стержней, шарнирно прикрепленных к первому основанию по его периметру, вторая группа из двух или более стержней, шарнирно прикрепленных ко второму основанию по его периметру, каждый стержень первой группы шарнирно соединен с соответствующим ему стержнем второй группы, образуя, таким образом, пару стержней, проточная полость помещенная внутрь объема, ограниченного первым и вторым основаниями, а также первой и второй группой стержней, дополнительно введены упругие элементы, герметично закреплены крепежными элементами в проточной полости, причем к каждому упругому элементу прикреплен к одному концу шток, а к другому концу - шарнирное соединение с соответствующей парой стержней, упругие элементы могут быть выполнены в виде мембран или в виде сильфонов.
Сущность изобретения поясняется чертежами:
на фиг.1 приведена конструкция пневмогидропривода, вид спереди, для случая, когда в проточную полость включены упругие элементы в виде мембран;
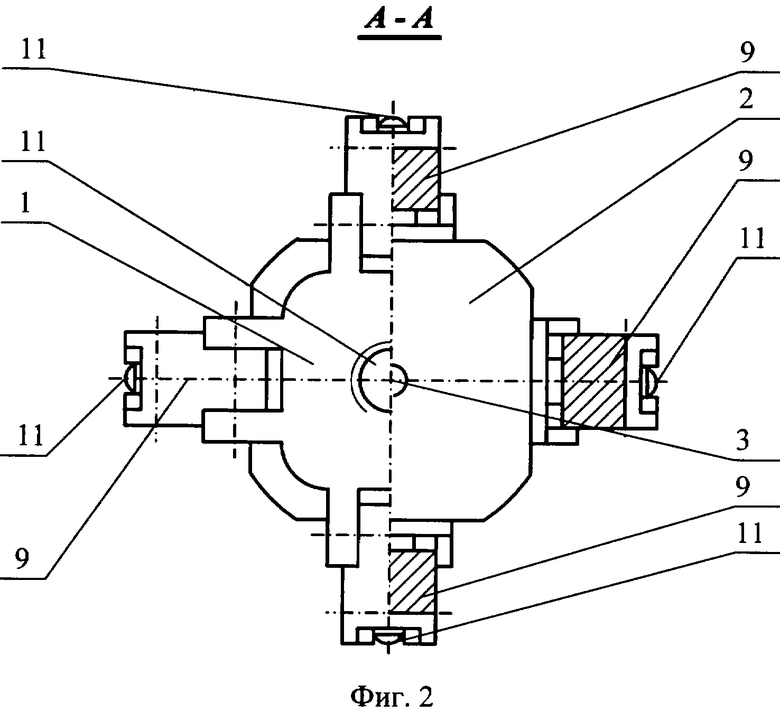
на фиг.2 показан пневмогидропривод, вид сверху с разрезом, минуя проточную полость;
на фиг.3 изображен разрез по верхнему основанию и центру проточной полости пневмогидропривода;
на фиг.4 приведен вариант конструкции шарнира, соединяющего стержни и шток мембраны;
на фиг.5 приведен вариант конструкции проточной полости с сильфонами.
В состав пневмогидропривода входят: первое и второе основания 1, проточная полость 2, которая через входной трубопровод 3 и входной управляемый клапан 4 соединяется с источником рабочего тела 5, а через выходной трубопровод 6 и выходной управляемый клапан 7 соединена с приемником рабочего тела 8, первая и вторая группы стержней 9, которые через шарниры 10 подсоединены к первой и второй рабочим полостям, имеющим элементы 11 для подсоединения внешней нагрузки, а также к упругим элементам, выполненным в виде мембран 12, через шток 13, при этом штоки 13 в мембране 12 и шарнире 10 закрепляются крепежными элементами 14. Упругие элементы могут быть выполнены также в виде сильфонов 15, как это показано на фиг.5, расположены вместо мембран 12, также через шток 13 закреплены в шарнире 10 крепежными элементами 14.
Пневмогидропривод работает следующим образом.
Рабочее тело (жидкость или газ) из источника 5 рабочего тела через входной управляемый клапан 4 и входной трубопровод 3 поступает в проточную полость 2, наполняя ее и создавая в ней избыточное давление. При наполнении проточной полости 2 рабочим телом упруго деформируются упругие элементы 12, при этом деформация через штоки 13 передается на шарниры 14, в каждом из которых сочленяются пара стержней 9 из первой и второй групп стержней 9 и шток 13, соединенный другим концом с соответствующим упругим элементом 12 или 15. За счет шарнирных соединений 10 стержней 9 с первым и вторым основаниями 1 первое и второе основания 1 (на фиг.1 они показаны сверху и снизу чертежа) сближаются. Таким образом, упругое перемещение упругих элементов 12 под действием избыточного давления в проточной полости 2 приводит к смещению шарнира, в котором сходятся пара стержней 9 и шток упругого элемента 12, в поперечном направлении от центральной оси пневмогидропривода, что в свою очередь приводит к изменению расстояния между первым и вторым основаниями 1 пневмогидропривода. При неизменном расстоянии между первым и вторым снованиями 1 на них передается через штоки 13, стержни 9 и шарниры 10 стягивающее усилие от избыточного давления рабочего тела в проточной полости 2.
К внешней нагрузке пневмогидропривод подсоединяется с помощью элементов 11 для подсоединения внешней нагрузки, которые могут быть выполнены в виде отверстий с резьбой в первом и втором основаниях 1. В данные отверстия могут быть ввернуты, например, рым-болты, но может быть принято и другое известное конструктивное решение.
Таким образом, при создании избыточного давления внутри проточной полости 2 осуществляется либо перемещение объекта за счет сокращения расстояния между первым и вторым основаниями 1, либо силовое воздействие на объект за счет передачи усилия, создаваемого избыточным давлением в проточной полости 2, на первое и второе основания 1. Возврат в исходное состояние осуществляется за счет открытия управляемого клапана 7 и стравливания избыточного давления из выходного трубопровода 6 в приемник рабочего тела 8.
В случае симметрии конструкции относительно центральной оси и относительно плоскости, проходящей через центр перпендикулярно центральной оси, усилие, создаваемое на первом и втором основаниях 1 пневмогидропривода, определяется зависимостью  , где n - количество пар стержней 9 в конструкции; s - эффективная площадь одного упругого элемента 12 или 15; Р - избыточное давление в проточной полости 2; ϕ - угол между одним из оснований 1 и соединенным с ним шарниром 10 стержнем 9.
, где n - количество пар стержней 9 в конструкции; s - эффективная площадь одного упругого элемента 12 или 15; Р - избыточное давление в проточной полости 2; ϕ - угол между одним из оснований 1 и соединенным с ним шарниром 10 стержнем 9.
При сбросе давления из проточной полости 2 через выходной трубопровод 6 и выходной управляемый клапан 7 в приемник рабочего тела 8 упругие элементы 12 или 15 возвращаются в исходное состояние за счет как упругости самого упругого элемента 12 или 15, так и за счет внешнего растягивающего усилия между первым и вторым основаниями 1.
При необходимости получения заданного по величине усилия на первом и втором основаниях 1 открываются оба управляемых клапана 4 и 7, при этом давление в проточной полости 2, а следовательно, и усилие на первом и втором основаниях 1 зависит от соотношения эффективных проходных сечений входного управляемого клапана 4 и выходного управляемого клапана 7.
Предлагаемый пневмогидропривод прост в эксплуатации и способен создавать широкий диапазон усилий, необходимых для перемещения объектов, что позволяет применять его в качестве исполнительного привода роботов и робототехнических систем, сходного по параметрам с человеческой мышцей, что делает робот еще ближе к антропоидному механизму.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМОГИДРОПРИВОД | 2006 |
|
RU2320905C1 |
| ЭЛЕКТРОЭНЕРГЕТИЧЕСКАЯ УСТАНОВКА | 1993 |
|
RU2053376C1 |
| Устройство аварийного отключения подачи воды | 2023 |
|
RU2829150C1 |
| РАСПРЕДЕЛИТЕЛЬНЫЙ КЛАПАН СУДОВОЙ СИСТЕМЫ ПОЖАРОТУШЕНИЯ | 2014 |
|
RU2594938C2 |
| АВТОМАТ АВАРИЙНОГО ЗАКРЫТИЯ КРАНА ДЛЯ МАГИСТРАЛЬНЫХ, ТЕХНОЛОГИЧЕСКИХ И ПРОМЫСЛОВЫХ ГАЗОПРОВОДОВ | 2024 |
|
RU2835257C1 |
| Клапан | 1982 |
|
SU1070365A1 |
| ЗАДВИЖКА | 1991 |
|
RU2014536C1 |
| СТАЦИОНАРНЫЙ ИЛИ ПЕРЕДВИЖНОЙ КОНТЕЙНЕР (ВАРИАНТЫ) | 2011 |
|
RU2491220C2 |
| Регулятор давления газа | 1979 |
|
SU842736A1 |
| АМОРТИЗАТОР | 2005 |
|
RU2277651C1 |



Пневмогидропривод предназначен для использования в системах автоматики в качестве исполнительного устройства. В пневгидромопривод, содержащий первое и второе основания, проточную полость, соединенную через входной трубопровод и входной управляемый клапан с источником рабочего тела и через выходной трубопровод и выходной управляемый клапан с приемником рабочего тела, введена первая группа из двух или более стержней, шарнирно прикрепленных к первому основанию по его периметру, вторая группа из двух или более стержней, шарнирно прикрепленных ко второму основанию по его периметру, каждый стержень первой группы шарнирно соединен с соответствующим ему стержнем второй группы, образуя, таким образом, пару стержней, и с проточной полостью, помещенной внутрь объема, ограниченного первым и вторым основаниями, а также первой и второй группой стержней, проточная полость содержит упругие элементы, герметично закреплены крепежными элементами в корпусе, количество которых соответствует количеству пар стержней, к каждому упругому элементу прикрепляется одним концом шток, другой конец которого образует шарнирное соединение с соответствующей парой стержней устройства, причем упругие элементы выполнены в виде мембран или в виде сильфонов. Технический результат - повышение величины развиваемого усилия на выходном элементе привода. 2 з.п. ф-лы, 5 ил.
| Преобразователь энергии | 1986 |
|
SU1344962A1 |
| Двигатель линейного перемещения | 1987 |
|
SU1622659A1 |
| МЕХАНИЧЕСКАЯ МЫШЦА | 1997 |
|
RU2137950C1 |
| Препарат для фиксации перманентной завивки волос | 1961 |
|
SU146261A1 |
| 0 |
|
SU161750A1 |

