Изобретение относится к управляемым приводам и предназначено для использования при необходимости сообщения движения механическим объектам с изменяющимися массогабаритными параметрами, в частности, в промышленных роботах, манипуляторах, станках и других объектах, к которым предъявляются высокие требования к динамике работы.
Известна механическая мышца, содержащая заполненную энергоносителем эластичную оболочку, выполненную с армированием. EP 0146261 A1/KUKOLI MIRKO 26.06.85/.
Недостатком данного устройства является отсутствие поперечного армирования в виде гибких нератяжимых нитей.
Наиболее близкой к предложенной является механическая мышца, содержащая заполненную энергоносителем эластичную оболочку, выполненную с армированием в поперечном направлении, параллельно ориентированными в этом направлении элементами. SU 1622659 A1/ ВНИИМЕТИЗНОЙ ПРОМЫШЛЕННОСТИ/ 23.01.91.
Недостатком данного устройства является отсутствие армирования в продольном и поперечном направлениях в виде гибких нерастяжимых нитей.
Задачей изобретения является обеспечение предсказуемости деформации оболочки в любом направлении.
Поставленная задача решается тем, что в механической мышце, содержащей заполненную энергоносителем эластичную оболочку, выполненную с армированием в поперечном направлении, параллельно ориентированным в этом направлении. При этом оболочка выполнена также с армированием в продольном направлении, а армирование в поперечном и продольном направлениях выполнено в виде гибких нерастяжимых нитей.
Решению поставленной задачи способствует также частные существенные признаки данного технического решения.
Армирование оболочки в продольном направлении выполнено с шагом, выбранным из условия обеспечения поперечного деформирования оболочки без потери герметичности.
Армирование оболочки в поперечном направлении выполнено с шагом, выбранным из условия обеспечения максимального укорочения оболочки при одновременном снижении поперечного размера и расхода энергоносителя, а также повышении быстродействия.
На фиг. 1 представлен общий вид предложенной механической мышцы, а на фиг. 2 показано ее рабочее положение.
Основу механической мышцы составляет цилиндрическая эластичная оболочка 1, заполненная энергоносителем /сжатыми жидкостью или газом/ 2. В оболочке 1 имеются нити продольного 3 и поперечного 4 армирования. На торцах оболочки 1 установлены присоединительные элементы 5, один из которых выполнен с возможностью подвода энергоносителя 2 во внутреннюю полость оболочки.
Механическая мышца работает следующим образом.
При увеличении внутренней энергии энергоносителя 2 любым известным способом /за счет нагрева, химической реакции, увеличения количества и т.д./ эластичная оболочка начинает деформироваться. Возникающие усилия воспринимаются нитями продольного 3 и поперечного 4 армирования, что предопределяет управляемое деформирование оболочки 1 с образованием гофр /фиг. 2/. Образование гофр по длине механической мышцы обуславливает ее линейное укорочение /сокращение/.
Таким образом, настоящее предложение позволяет реализовать пространственно гибкий линейный двигатель без трущихся подвижных элементов. Его рабочий процесс описывается выражением:
где F - сила натяжения механической мышцы, Н;
P - давление энергоносителя, Па;
Ro - радиуса поперечной армировки, м;
Ne - число элементов в мышце;
L - длина мышцы в свободном состоянии;
α - - угол гофра, рад.
Например: для P = 0,5 Па, Ne = 10, R0 = 0,02 м, L = 0,6 м, α = 0,523599 рад, сила натяжения F составляет около 4200Н при сокращении мышцы на 0,08 м.
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРОВАЯ МЕХАНИЧЕСКАЯ МЫШЦА | 1999 |
|
RU2204061C2 |
| МЕХАНИЧЕСКАЯ МЫШЦА | 2002 |
|
RU2247875C2 |
| МЕХАНИЧЕСКАЯ МЫШЦА | 2002 |
|
RU2255251C2 |
| МЕХАНИЧЕСКАЯ МЫШЦА | 2000 |
|
RU2224916C2 |
| ПРИВОД МЕХАНИЗМА ИЗМЕНЕНИЯ ПРОСТРАНСТВЕННОГО ПОЛОЖЕНИЯ ПОДВИЖНЫХ ЭЛЕМЕНТОВ КУЗОВОВ, САЛОНОВ, КАБИН ТРАНСПОРТНЫХ СРЕДСТВ | 1999 |
|
RU2204741C2 |
| Модуль робота | 1986 |
|
SU1333565A1 |
| МЕТАЛЛО-КОМПОЗИТНЫЙ БАЛЛОН ДАВЛЕНИЯ | 2010 |
|
RU2439425C2 |
| Композитный демпфирующий элемент и способ его изготовления | 2018 |
|
RU2717270C2 |
| МЕТАЛЛОКОМПОЗИТНЫЙ БАЛЛОН ВЫСОКОГО ДАВЛЕНИЯ | 2009 |
|
RU2432521C2 |
| МАНЖЕТНОЕ УПЛОТНЕНИЕ С ДАТЧИКАМИ ИНФОРМАЦИОННО-ЭНЕРГЕТИЧЕСКОГО СОСТОЯНИЯ | 1999 |
|
RU2186274C2 |
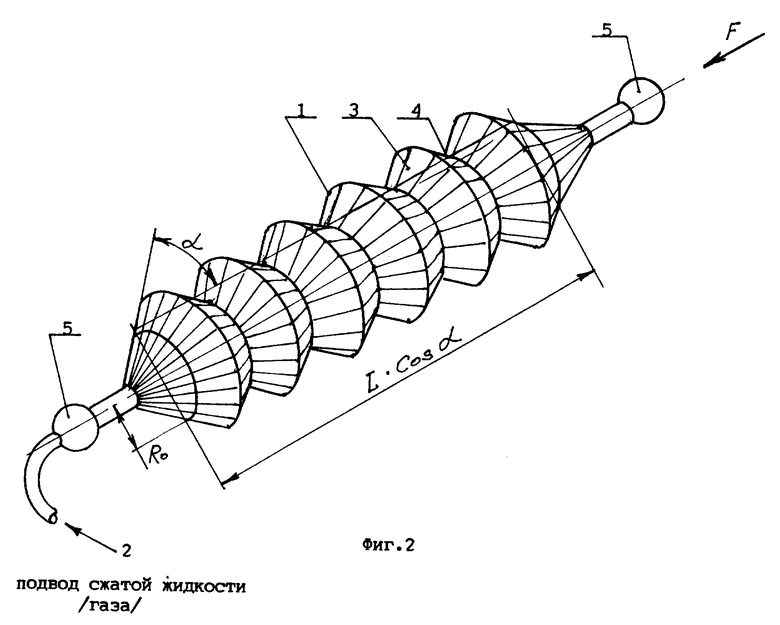
Мышца предназначена для использования в промышленных роботах, манипуляторах, станках. Она содержит цилиндрическую эластичную оболочку, заполненную энергоносителем, например жидкостью. Оболочка армирована гибкими нерастяжимыми нитями в продольном направлении и в поперечном. Армирование в продольном направлении выполнено с шагом, обеспечивающим поперечное деформирование оболочки без потери герметичности. Для армирования в поперечном направлении предусмотрен шаг, позволяющий получить максимальное укорочение мышцы. На торцах оболочки установлены присоединительные элементы, один из которых выполнен с возможностью подвода энергоносителя во внутреннюю полость оболочки. Технический результат -повышение надежности. 2 з.п.ф-лы, 2 ил.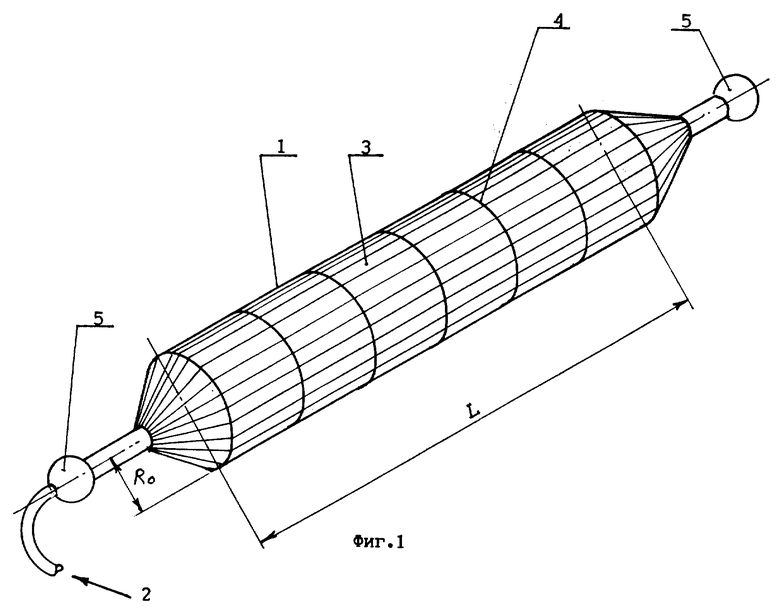
| Двигатель линейного перемещения | 1987 |
|
SU1622659A1 |
| Препарат для фиксации перманентной завивки волос | 1961 |
|
SU146261A1 |
| Преобразователь энергии | 1986 |
|
SU1344962A1 |
| ГИДРОПНЕВМОДВИГАТЕЛЬ | 1976 |
|
SU1103640A1 |
| ДВИГАТЕЛЬ | 1978 |
|
SU1066281A1 |
| ГИДРАВЛИЧЕСКИЙ ИЛИ ПНЕВМАТИЧЕСКИЙ ДВИГАТЕЛЬ s^vvj- :;:^^ ^ | 0 |
|
SU334411A1 |

