Изобретение относится к машиностроению, в частности к механизмам преобразования усилий и движений, а именно к силовым аксоидным механизмам и оборудованию с силовым приводом исполнительных органов, созданным на основе силовых аксоидных механизмов, в частности к прессам.
Уровень техники
Известен силовой аксоидный механизм (далее по тексту "САМ") по евразийскому патенту №000482, содержащий концевые элементы, имеющие возможность поступательного перемещения каждый в своем направлении, оснащенные опорными поверхностями, и промежуточное звено, состоящее из контактных элементов с опорными поверхностями, взаимодействующими с опорными поверхностями концевых элементов так, что при перемещении одного концевого элемента обеспечивается их взаимное аксоидное качение без проскальзывания с передачей усилий и движения другому концевому элементу. В таком механизме трение между элементами устраняется в результате замены скольжения на аксоидное качение опорных поверхностей элементов, что позволяет использовать для его изготовления материалы, допускающие высокие контактные напряжения. Вследствие этого такие механизмы обладают в несколько раз более высокими силовыми характеристиками, чем шарнирно-рычажные механизмы с аналогичной кинематикой.
Однако на направляющих концевых элементов САМа и сопряженных с ними деталях действующие усилия вызывают существенное трение, которое приводит к их быстрому износу и энергетическим потерям. Снижение трения на направляющих САМа может быть достигнуто устранением или уменьшением нормальных составляющих реакций, действующих на направляющие его концевых элементов, путем создания условий для их взаимного уравновешивания.
Этот способ снижения трения в САМе открывает широкие перспективы синтеза новых, более эффективных уравновешенных силовых аксоидных механизмов, способных работать без существенного трения в направляющих. В силовых приводах технологического оборудования применяются различные механизмы, развивающие большие усилия, например рычажные и крпвошипно-ползунные механизмы, как в большинстве прессов, в которых имеются шарнирные узлы и направляющие скольжения.
Замена этих традиционных приводов приводами, выполненными на основе САМов с уменьшенным трением и высокой надежностью, позволит осуществить дальнейшее совершенствование силового оборудования, в частности прессов.
Сущность изобретения
Целью настоящего изобретения является разработка новых силовых аксоидных механизмов, названных уравновешенными силовыми аксоидными механизмами (далее по тексту "УСАМы"), в которых трение на его концевых элементах и число направляющих снижается путем уравновешивания действующих на них усилий. Его разновидности могут найти широкое практическое применение в технологическом оборудовании, например в прессовом оборудовании, связанном с большими усилиями.
Уравновешивание усилий в УСАМе и соответствующее снижение трения на направляющих элементах, а в некоторых случаях и устранение потребности в таковых достигается объединением концевых элементов, по меньшей мере, двух САМов, выполненных по Евразийскому патенту №000482, в новый по функциональному назначению элемент, названный поликонцевым, уравновешивающий усилия так, что нормальная составляющая совокупного силового воздействия поликонцевого элемента на соответствующую направляющую была близка или равнялась нулю. Поэтому простейший УСАМ представляет собой двухзвенный механизм, состоящий минимально из двух САМов, у которых два концевых элемента объединены в один ведущий поликонцевой элемент и, по меньшей мере, один крайний концевой элемент которого является ведомым, подвижно или жестко контактирует с рабочим органом, а второй концевой элемент соединен с опорным элементом. Второй вариант исполнения такого УСАМа отличается от первого тем. что два крайних его концевых элемента являются ведомыми и соединены с элементами рабочих органов. Существует и третий вариант исполнения такого УСАМа, когда один или два крайних концевых элемента воспринимают усилия привода и являются ведущими, а центральные концевые элементы образуют ведомый поликонцевой элемент. Во всех случаях два звена такого УСАМа вместе с неподвижными и подвижными опорными элементами, которыми могут являться, например, элементы станины или рабочих органов оборудования, составляют силовой контур, уравновешивающий усилия и реакции на одном поликонцевом элементе.
В случае замкнутого силового контура все множество полпконцевых элементов УСАМа уравновешивает усилия, по меньшей мере, четырех его силовых звеньев, каждое из которых в свою очередь содержит один и более САМов. При этом силовые звенья УСАМа образуют один и более замкнутый силовой контур, в каждом из которых поликонцевые элементы уравновешивают усилия, обеспечивают раздельный и совмещенный привод ведущим поликонцевым элементам каждого силового контура, прием, передачу усилий и необходимых перемещений ведомыми поликонцевыми элементами, соединенными с элементами других механизмов или исполнительными органами. Если в УСАМе силовые звенья образуют два и более силовых контуров в зонах их контактирования появляются общие для них промежуточные поликонцевые элементы, являющиеся ведомыми и ведущими в соответствующих, контактирующих при их посредстве силовых уравновешивающих контурах. Они не взаимодействуют непосредственно с элементами привода и других исполнительных механизмов.
Опорные поликонцевые элементы, имеющиеся в УСАМе, выполняют функцию неподвижных опор, предназначенных для компенсации усилий силовых звеньев и ведущих поликонцевых элементов соответствующих силовых контуров, и, как правило, замыкают силовой контур силовых звеньев на станину оборудования. Ведущие, ведомые и промежуточные поликонцевые элементы могут выполнять функцию подвижных опор в УСАМе и являться также дополнительными опорными поликонцевыми элементами, если их перемещения ограничиваются направляющими.
Симметрия силовых контуров УСАМа относительно, по меньшей мере, одной плоскости создает благоприятные условия для полного уравновешивания симметричных относительно такой плоскости вредных составляющих усилий на поликонцевых элементах. Это позволяет устранить трение в УСАМе и некоторых направляющих при условии взаимозависимости перемещений ведущих и ведомых поликонцевых элементов. Таким образом в УСАМе поликонцевые элементы обеспечивают уравновешивание усилий внутри соответствующего силового контура звеньев, а их симметрия создает условия для устранения трения и некоторых направляющих элементов, что существенным образом отличает УСАМ от САМа и составляет новизну и практическую применимость настоящего изобретения.
Силовые звенья УСАМа могут составлять, два и более замкнутых силовых уравновешенных контура, например, с раздельным приводом ведущих поликонцевых элементов, симметричных относительно одной плоскости, содержащей геометрическую ось направляющей, по меньшей мере, одного ведущего поликонцевого элемента основного силового контура, получающего движение и/или усилия от привода. Эти усилия могут быть переданы через силовые звенья, по меньшей мере, одному промежуточному и одному ведомому поликонцевому элементу, контактирующему с рабочим органом. Промежуточный поликонцевой элемент, являющийся ведомым элементом второго силового контура УСАМа, может перемещаться под действием усилий, прилагаемых к нему и опорному поликонцевому элементу, усилий силовых звеньев от двух ведущих поликонцевых элементов, принимающих их от другого привода. В этом случае промежуточный поликонцевой элемент может обладать возможностью независимых от первого силового контура перемещений и выполнять для него функцию подвижного опорного поликонцевого элемента, положение которого может быть в каждом случае технологически задано и жестко зафиксировано.
Возможен и вариант УСАМа, который создает усилия на крайнем ведомом поликонцевом элементе, для этого он содержит, по меньшей мере, один опорный поликонцевой элемент. При наличии в УСАМе двух последовательно расположенных силовых контуров ведомый поликонцевой элемент первого силового контура может являться ведущим поликонцевым элементом для второго силового контура, а также промежуточным опорным поликонцевым элементом УСАМа. Если силовых контуров больше двух, то ведомый поликонцевой элемент второго силового контура будет также промежуточным опорным поликонцевым элементом для третьего, и так далее.
Если звенья УСАМа образуют несколько независимых замкнутых силовых контуров, то они, как правило, располагаются внутри одного и более опорных концевых элементов, воспринимающих реакции усилий их силовых звеньев. При этом ведущие поликонцевые элементы каждого независимого силового контура передают усилия и перемещения своих звеньев соответствующему ведомому поликонцевому элементу, осуществляющему в УСАМе раздельное перемещение и передачу усилий. Совокупность усилий и перемещений ведомых поликонцевых элементов позволяет осуществить УСАМу посредством рабочих органов его основную технологическую функцию.
УСАМ как система ведущих, промежуточных, ведомых и опорных поликонцевых элементов и силовых звеньев может иметь независимый или общий для всех силовых контуров привод, а также быть симметричным относительно нескольких плоскостей. Это позволяет обойтись без направляющих для некоторых поликонцевых элементов, траектория движения которых в этом случае обеспечивается степенями подвижности УСАМа.
Одним из предпочтительных для уравновешивания усилий является УСАМ, содержащий четыре силовых звена и четыре поликонцевых элемента, замкнутые в один силовой контур, симметричный относительно двух взаимно перпендикулярных плоскостей, не имеющий промежуточных поликонцевых элементов, где пара ведущих поликонцевых элементов располагается симметрично относительной одной плоскости симметрии, а пара ведомых поликонцевых элементов - симметрично относительно другой плоскости симметрии. В таком УСАМе все нормальные к направляющим составляющие усилий ведущих и ведомых поликонцевых элементов взаимно уравновешиваются, а силы трения близки к нулю. Это позволяет обойтись без некоторых направляющих на поликонцевых элементах при условии, что оставшиеся направляющие обеспечивают однозначную зависимость. перемещений ведомых поликонцевых элементов от перемещений ведущих поликонцевых элементов.
При необходимости область перемещения ведущих поликонцевых элементов может быть ограничена так, чтобы область перемещения геометрических осей их опорных поверхностей располагалась от середины за плоскостями, проходящими через геометрические оси соответствующих опорных поверхностей ведомых поликонцевых элементов, либо между названными соответствующими плоскостями, либо по обе стороны от названных соответствующих плоскостей.
Варианты расположения областей перемещения геометрических осей опорных поверхностей ведущих поликонцевых элементов создают три возможных варианта УСАМа, являющегося также объектом настоящего изобретения.
Силовая симметрия каждого из предпочтительных вариантов УСАМа характерна тем, что к его ведущим и ведомым поликонцевым элементам прикладываются внешние силы, попарно равные по величине и противоположные по направлению. При этом, если не учитывать силы трения, то в этих вариантах УСАМа зависимость усилий на ведомом поликонцевом элементе от усилия на ведущем поликонцевом элементе выразится в виде:

где P1 - усилие на ведущем поликонцевом элементе; Р2 - усилие на ведомом поликонцевом элементе; α - угол между направлением направляющей ведущего поликонцевого элемента и линией, проходящей через геометрические оси опорных поверхностей соответствующих ведущего и ведомого поликонцевых элементов.
Очевидно, что для УСАМа при значениях угла α, близких к 90° (когда геометрические оси опорных поверхностей ведущих поликонцевых элементов находятся вблизи плоскостей, проходящих через соответствующие геометрические оси опорных поверхностей ведомых поликонцевых элементов), обеспечивается значительное увеличение отношения усилия на ведомом поликонцевом элементе к усилию на ведущем поликонцевом элементе. Это делает его привлекательным для силового привода исполнительных органов технологического оборудования с большими рабочими усилиями, например, прессов. Такое оборудование можно разделить на три группы:
1. Оборудование с относительно большим рабочим ходом исполнительного органа и относительно малым рабочим усилием в начале рабочего хода, плавно возрастающим к концу рабочего хода: к таким машинам могут относиться устройства, осуществляющие при их работе значительное уплотнение обрабатываемого материала, например, пресса для формования изделий из уплотняемого материала.
2. Оборудование с относительно малым рабочим ходом исполнительного органа и большим рабочим усилием, приблизительно постоянным в пределах всего рабочего хода: к таким машинам могут относиться устройства для пластической обработки изделий из металла с малой их деформацией.
3. Оборудование с относительно большим рабочим ходом исполнительного органа и большим рабочим усилием, приблизительно постоянным в пределах всего рабочего хода: к таким машинам могут относиться большинство прессов, применяемых в металлообработке.
Для всех случаев несложно синтезировать силовой привод оборудования на основе УСАМа высокой компактности и достаточными динамическими и кинематическими параметрами. Для этого необходимо выполнить условие, заключающееся в том, что в пределах рабочего хода ни одна точка графика, описывающего закон изменения нагрузки на исполнительном органе при его перемещении, не должна быть выше соответствующей точки графика, описывающего выражение (1).
Отличие третьего случая заключается в необходимости применения УСАМов с несколькими силовыми контурами, обладающими возможностью разделенной подачи усилий и перемещений. При этом один и более силовых контуров обеспечивают перемещение и фиксацию относительного положения основного силового контура звеньев УСАМа, обеспечивающего привод исполнительного органа. Силовые контуры звеньев УСАМа могут иметь раздельный или совмещенный привод, выполненный на основе известных устройств.
Эта проблема может быть решена соответствующим перемещением первого силового уравновешивающего контура САМа, обеспечивающего перемещение, а также фиксацию его основного силового контура, создающего усилия на рабочем органе, в пределах деформации обрабатываемого материала. Данное условие соблюдается без особых затруднений при автоматическом режиме включения силового привода.
В этом случае после выполнения рабочего хода одного цикла работы основной силовой контур УСАМа возвращается в исходное положение. При этом если материал обрабатываемого изделия имеет остаточную деформацию, возврат основного силового контура УСАМа в исходное положение (холостой ход) совершается без силового воздействия на исполнительный орган со стороны обрабатываемого изделия. В этот момент осуществляется перемещение опорного ведомого поликонцевого элемента первого силового контура, который обладает свойством сохранять приданное ему положение, когда рабочий орган примет исходное положение для очередного силового воздействия на обрабатываемый материал и таким образом обеспечивает возможность совершения рабочего хода с соответствующим силовым воздействием в пределах рабочего хода опорного силового контура САМа. При этом управление его перемещением может осуществляться согласно технологической программе обработки изделия. Поэтому УСАМ может быть практически применен как силовой привод для оборудования с большим рабочим ходом и большим рабочим усилием.
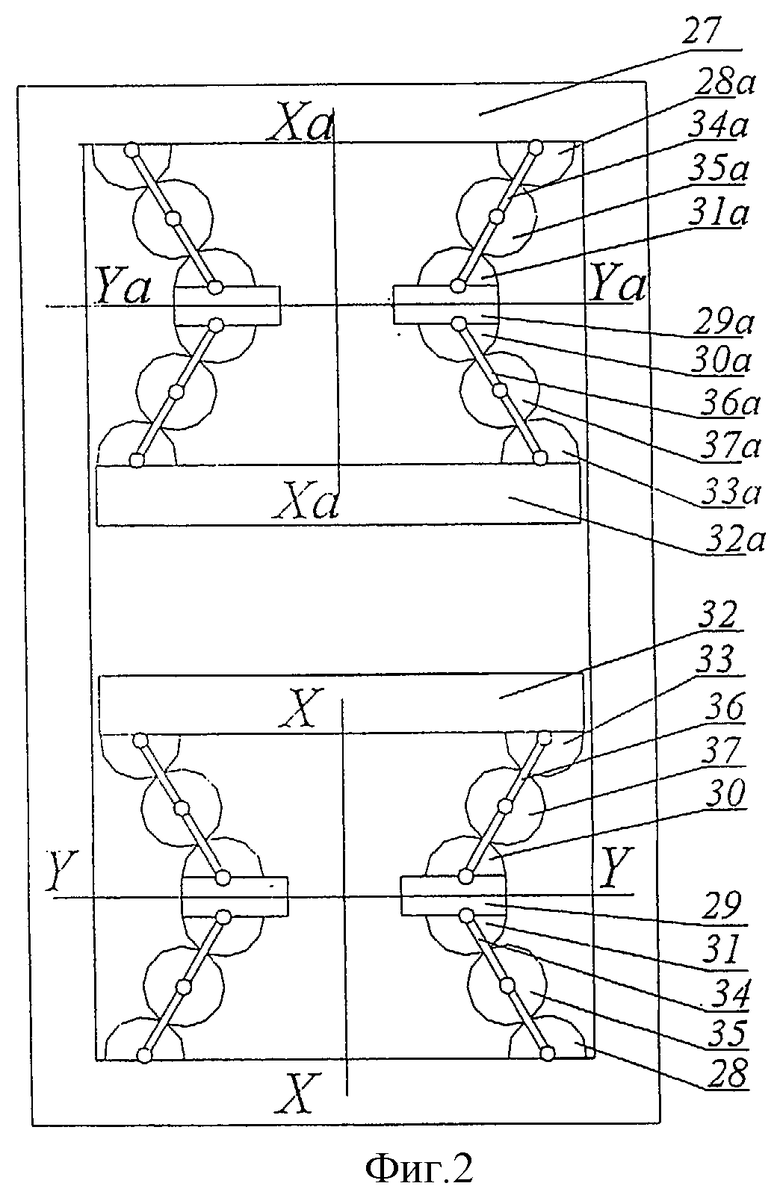
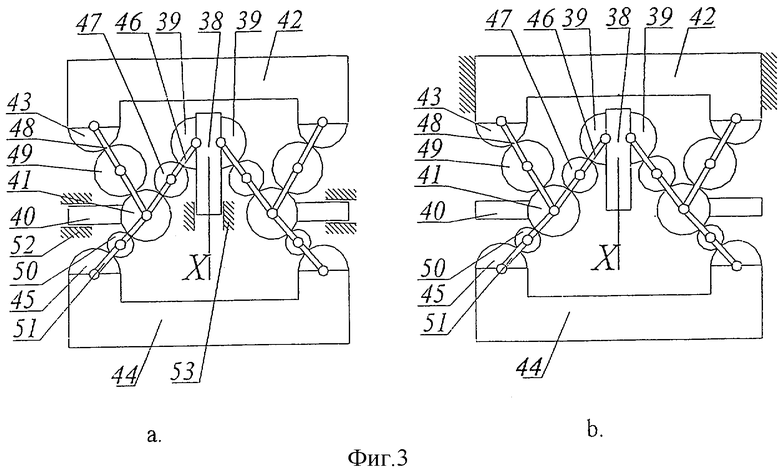
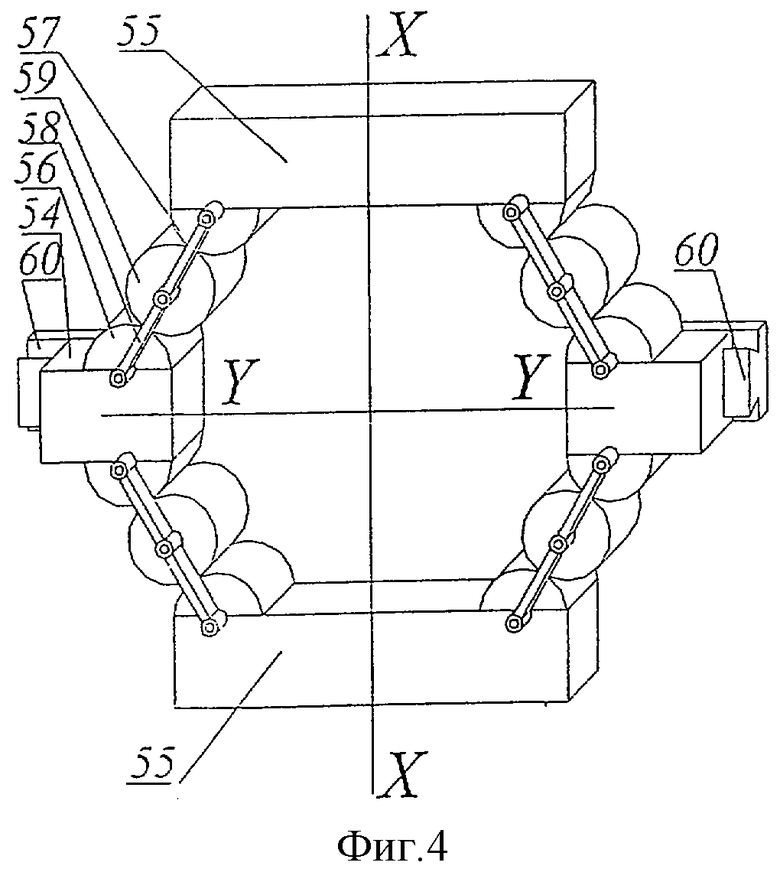
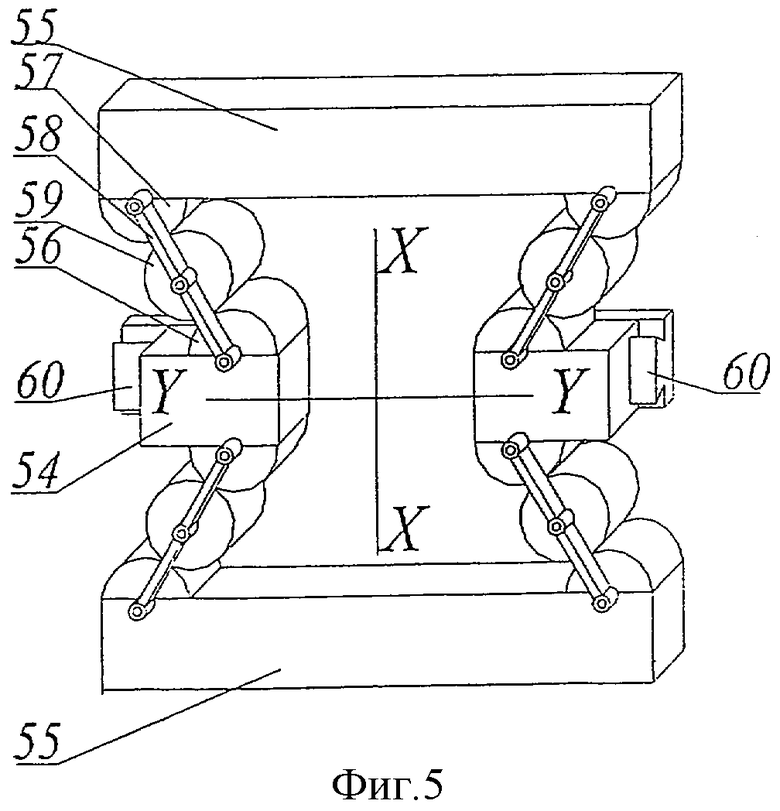
На Фиг.1 показана схема УСАМа с двумя последовательно расположенными силовыми контурами; на Фиг.2 - схема варианта УСАМа с двумя независимыми силовыми контурами, опорный поликонцевой элемент которого оформлен в виде рамы; на Фиг.3 - схема УСАМа с ведущим, промежуточными и ведомыми поликонцевыми элементами в двух вариантах: а. - с направляющими для промежуточных поликонцевых элементов и двумя подвижными ведомыми поликонцевыми элементами; b. - с одним опорным, одним ведомым и промежуточными поликонцевыми элементами без направляющих; на Фиг.4 показан первый вариант УСАМа без промежуточных поликонцевых элементов в начальном положении (то же - начальное или конечное положение третьего варианта); на Фиг.5 - второй вариант УСАМа без промежуточных поликонцевых элементов в начальном положении (то же - конечное или начальное положение третьего варианта); на Фиг.6 - УСАМ без промежуточных поликонцевых элементов в положении, когда геометрические оси опорных поверхностей ведущих поликонцевых элементов находятся вблизи поверхностей, проходящих через соответствующие геометрические оси опорных поверхностей ведомых поликонцевых элементов, являющемся конечным положением первого и второго вариантов УСАМа или средним положением третьего варианта; на Фиг.7 показан вариант УСАМа без промежуточных поликонцевых элементов, между ведущими и ведомыми поликонцевыми элементами которого размещено по две совокупности опорных поверхностей; на Фиг.8 показан вариант исполнения аксоидного пресса с дисковым ротором для прессования изделий из уплотняемых материалов с силовым приводом прессования на основе УСАМа по Фиг.4; на Фиг.9 показан вариант исполнения аксоидного пресса с цилиндрическим ротором для прессования изделий из уплотняемых материалов с силовым приводом прессования на основе УСАМа по Фиг.5; на Фиг.10 показан вариант исполнения аксоидного пресса с цилиндрическим ротором для прессования изделий из уплотняемых материалов с силовым приводом исполнительных органов на основе общего УСАМа с двумя ведущими поликонцевыми элементами; на Фиг.11 показан вариант исполнения пуансонов механизма прессования с пальцами и плитами прессования, которым может быть оснащен любой из прессов по Фиг.8, 9, 10; на Фиг.12 показан вариант аксоидного пресса с приводом на основе УСАМа по Фиг.3.b.
Возможность осуществления изобретения
Уравновешенный силовой аксоидный механизм, схема которого изображена на Фиг.1, содержит два силовых контура. Первый силовой контур состоит из ведущего поликонцевого элемента 1, оснащенного опорными поверхностями 2, промежуточных поликонцевых элементов 3, оснащенных опорными поверхностями 4, промежуточного поликонцевого элемента 5, являющегося для всего УСАМа промежуточным опорным поликонцевым элементом, оснащенного опорными поверхностями 6, ведомого поликонцевого элемента 7, оснащенного опорными поверхностями 8, силовых звеньев, состоящих из удерживающих элементов 9 и фиксируемых ими во взаимодействии промежуточных звеньев 10 и опорных поверхностей 2 и 4, силовых звеньев, состоящих из удерживающих элементов 11 и фиксируемых ими во взаимодействии промежуточных звеньев 12 и опорных поверхностей 4 и 6, и силовых звеньев, состоящих из удерживающих элементов 13 и фиксируемых ими во взаимодействии промежуточных звеньев 14 и опорных поверхностей 8 и 4. Возможные перемещения ведущего поликонцевого элемента 1 определяются неподвижными направляющими 15. Второй силовой контур содержит промежуточный поликонцевой элемент 5, оснащенный опорными поверхностями 16, ведущие поликонцевые элементы 17, оснащенные опорными поверхностями 18, опорный поликонцевой элемент 19, оснащенный опорными поверхностями 20, силовые звенья, состоящие из удерживающих элементов 21 и фиксируемых ими во взаимодействии промежуточных звеньев 22 и опорных поверхностей 16 и 18, силовые звенья, состоящие из удерживающих элементов 23 и фиксируемых ими во взаимодействии промежуточных звеньев 24 и опорных поверхностей 18 и 20. Перемещения промежуточного поликонцевого элемента 5 определяются направляющими 25, а ведомого поликонцевого элемента 7 - направляющими 26. Ввиду симметрии УСАМа относительно плоскости симметрии Х-Х номера позиции нанесены только на одной половине изображения.
Двухконтурный УСАМ, опорный поликонцевой элемент которого оформлен в виде рамы, показанный на Фиг.2, состоит из двух замкнутых силовых контуров любой конфигурации, например, связанных друг с другом опорным поликонцевым элементом 27, выполненным в виде станины рамной конфигурации, оснащенным опорными поверхностями 28 и 28а. Для удобства идентичные элементы одного из силовых контуров обозначены номерами без буквенного индекса, а второго - с индексом а. Каждый силовой контур САМа содержит кроме опорного поликонцевого элемента 27 ведущие поликонцевые элементы 29 и 29а, оснащенные опорными поверхностями 30 и 31, 30а и 31a, ведомый поликонцевой элемент 32, 32а, оснащенный опорными поверхностями 33, 33а, силовые звенья, состоящие из удерживающих элементов 34, 34а и фиксируемых ими во взаимодействии промежуточных звеньев 35, 35а и опорных поверхностей 28, 28а и 31, 31а, и силовые звенья, состоящие из удерживающих элементов 36, 36а и фиксируемых ими во взаимодействии промежуточных звеньев 37, 37а и опорных поверхностей 30, 30а и 33, 33а. Каждый контур симметричен относительно двух взаимно перпендикулярных плоскостей Х-Х и Y-Y и может определять траектории движения ведущих поликонцевых элементов 29, 29а и ведомого поликонцевого элемента 32, 32а и без направляющих, которыми может оснащаться опорный поликонцевой элемент 27, 27а в случае необходимости устранить влияние случайных факторов, стремящихся исказить названные траектории.
УСАМ, схема которого в двух вариантах показана на Фиг.3, содержит ведущий поликонцевой элемент 38, оснащенный опорными поверхностями 39, промежуточные поликонцевые элементы 40, оснащенные опорными поверхностями 41, ведомый поликонцевой элемент 42, оснащенный опорными поверхностями 43, ведомый поликонцевой элемент 44, оснащенный опорными поверхностями 45, силовые звенья, состоящие из удерживающих элементов 46 и удерживаемых ими во взаимодействии промежуточных звеньев 47 и опорных поверхностей 39 и 41, силовые звенья, состоящие из удерживающих элементов 48 и фиксируемых ими во взаимодействии промежуточных звеньев 49 и опорных поверхностей 41 и 43, и силовые звенья, состоящие из удерживающих элементов 50 и фиксируемых ими во взаимодействии промежуточных звеньев 51 и опорных поверхностей 41 и 45. Варианты а. и b. отличаются друг от друга тем, что в варианте b. поликонцевой элемент 42 является опорным поликонцевым элементом, а также составом необходимых направляющих, определяющих возможные перемещения их поликонцевых элементов.
В варианте а. промежуточные поликонцевые элементы 40 являются подвижными опорными поликонцевыми элементами, возможные перемещения которых определяются неподвижными направляющими 52, возможные перемещения ведущего поликонцевого элемента 38 определяются неподвижными направляющими 53, а для обеспечения возможных перемещений ведомых поликонцевых элементов 42 и 44 направляющие не обязательны.
В варианте b. опорный поликонцевой элемент 42 является неподвижным, а для обеспечения возможных перемещений остальных поликонцевых элементов направляющие не обязательны.
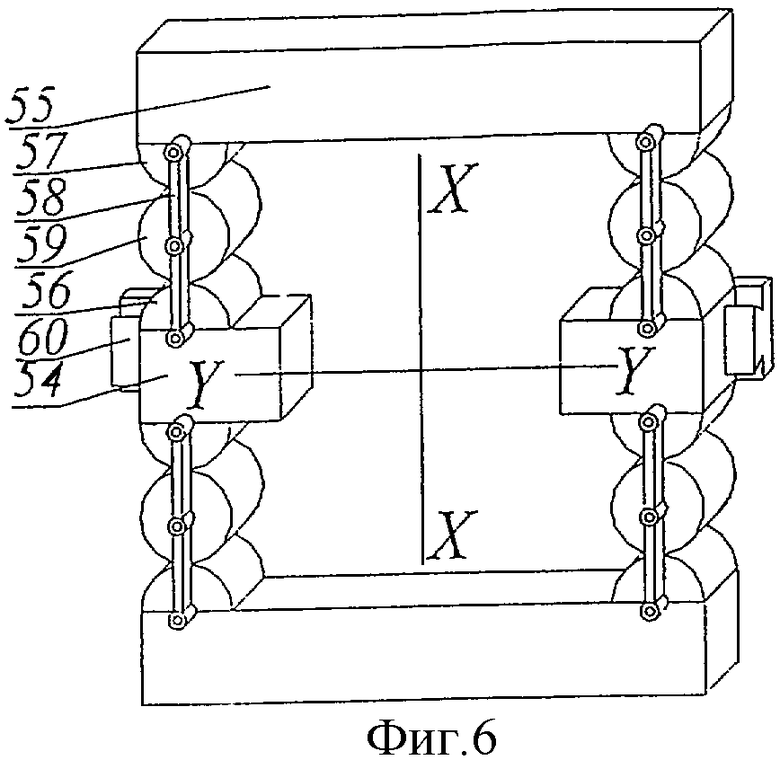
Преимущественное исполнение уравновешенного силового аксоидного механизма без промежуточных поликонцевых элементов (см. Фиг.4-7) состоит из ведущих опорных 54 и ведомых 55 поликонцевых элементов, имеющих возможность поступательного перемещения симметрично относительно соответственно плоскостей симметрии Х-Х и Y-Y. Ведущие опорные поликонцевые элементы 54 оснащены цилиндрическими опорными поверхностями 56, а ведомые поликонцевые элементы 55 - цилиндрическими опорными поверхностями 57. Между опорными поверхностями 56 и 57 удерживающими элементами 58 во взаимодействии с ними фиксируются промежуточные звенья 59 таким образом, чтобы геометрические оси взаимодействующих опорных поверхностей 56, 57 и промежуточных звеньев 59 располагались в одной плоскости. Ведущие опорные поликонцевые элементы 54 связаны с приводом (условно не показан) любой известной конструкции, обеспечивающим их симметричные перемещения.
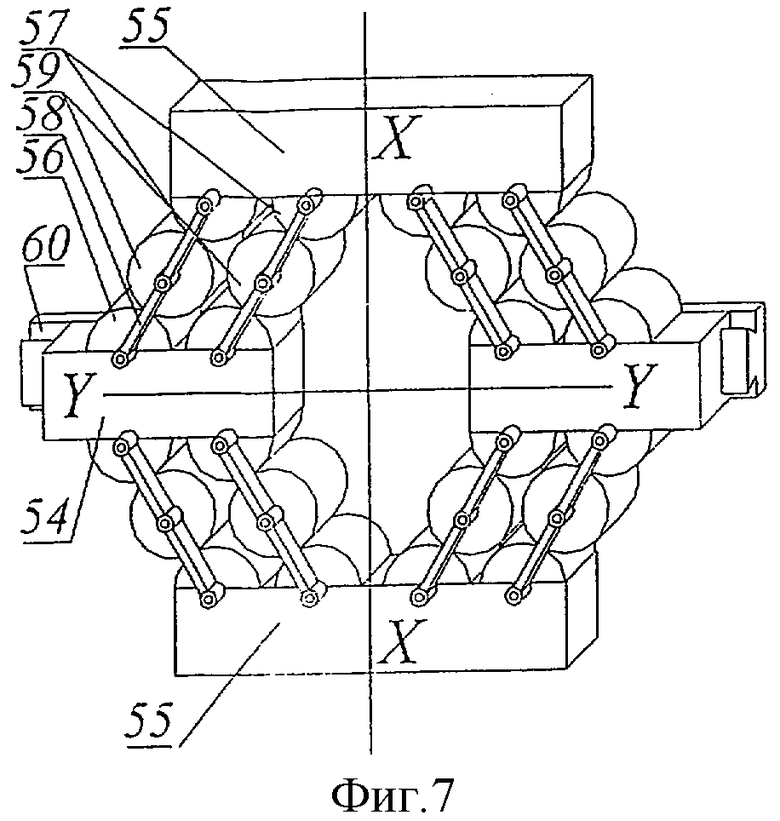
В зависимости от размеров ведомых поликонцевых элементов 55 и особенностей компоновки устройств, в которых они могут быть использованы, УСАМы можно разделить на следующие основные варианты: (а) - вариант, исходное положение которого показано на Фиг.4, а конечное - на Фиг.6; (б) - вариант, исходное положение которого показано на Фиг.5, а конечное - на Фиг.6 и (в) - вариант, исходное и конечное положения которого показаны на Фиг.4 и 5, а среднее положение между начальным и конечным - на Фиг.6. Нагрузочная способность УСАМа может быть увеличена параллельным исполнением между соответствующими ведущими и ведомыми поликонцевыми элементами более одной совокупности из опорных поверхностей 56, 57, промежуточных звеньев 59 и удерживающего элемента 58, например, как показано на Фиг.7.
Если возможные перемещения ведущих опорных поликонцевых элементов 54 УСАМа по любому из указанных вариантов определяются неподвижными направляющими 60, то возможные перемещения ведомых поликонцевых элементов могут определяться и без направляющих за счет имеющихся степеней подвижности УСАМа.
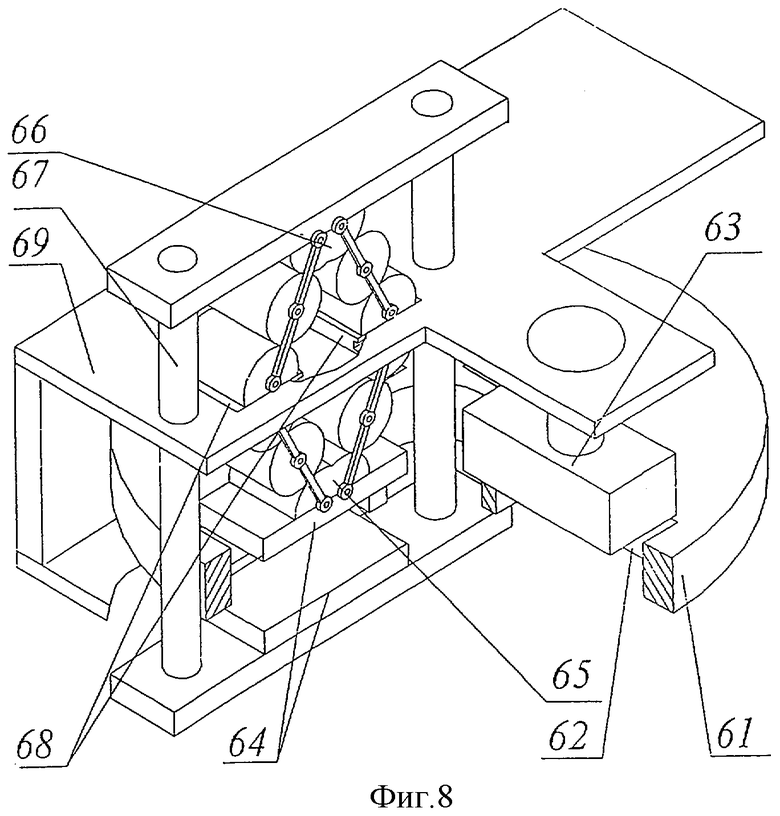
Вариант аксоидного пресса, показанный на Фиг.8, состоит из дискового ротора 61 с размещенными в нем пресс-формами 62, механизмов загрузки (на чертеже не видны), выпрессовки 63 и механизма прессования, в состав которого входят: пуансоны прессования 64, один из которых связан непосредственно с ведомым поликонцевым элементом 65 УСАМа, а второй - с ведомым поликонцевым элементом 66 через тяги 67. Ведущие опорные поликонцевые элементы 68 УСАМа размещены в направляющих станины 69. Привод УСАМа во избежание усложнения восприятия устройства аксоидного пресса не показан.
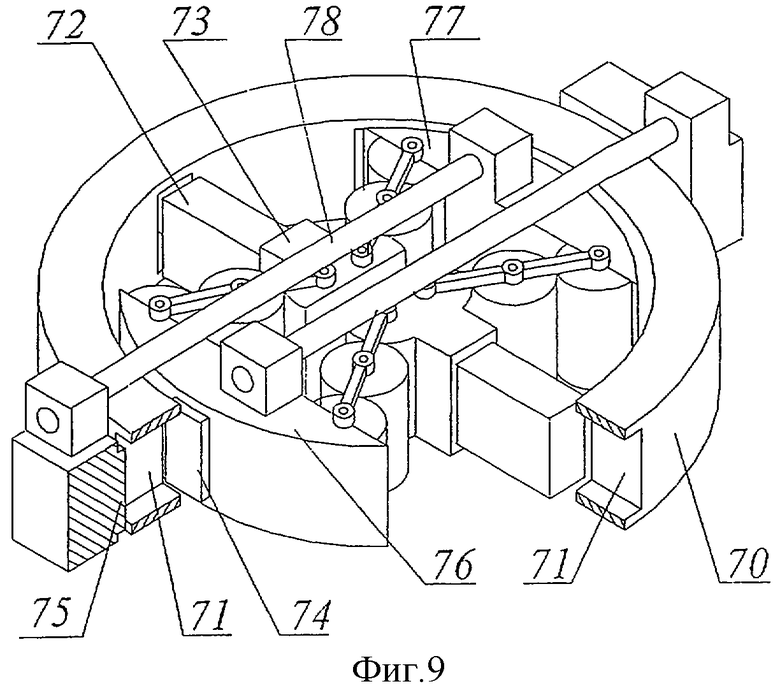
Вариант аксоидного пресса, показанный на Фиг.9, состоит из цилиндрического ротора 70 с размещенными в нем пресс-формами 71, двух механизмов загрузки (на чертеже не видны), двух механизмов выпрессовки 72, связанных с ведущими опорными поликонцевыми элементами 73 УСАМа, и механизма прессования, в состав которого в двух экземплярах входят: пуансоны прессования 74 и 75; пуансон 74 связан непосредственно с ведомым поликонцевым элементом 76 УСАМа, а пуансон 75 - с ведомым поликонцевым элементом 77 через тяги 78. Ведущие опорные 73 и ведомые 76 и 77 поликонцевые элементы УСАМа размещены в направляющих станины (не показаны). Привод УСАМа во избежание усложнения восприятия устройства аксоидного пресса не показан.
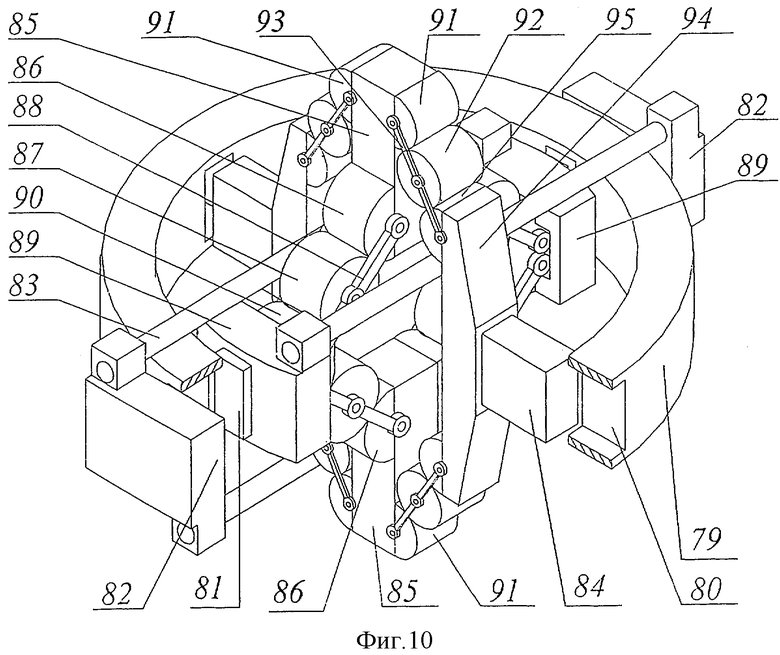
Вариант аксоидного пресса, показанный на Фиг.10, содержит цилиндрический ротор 79 с размещенными в нем пресс-формами 80, пуансоны прессования 81, 82, тяги 83, пуансон выпрессовки 84 и УСАМ, состоящий, по меньшей мере, из двух силовых контуров УСАМа, с общими ведущими поликонцевыми элементами 85. Общие ведущие поликонцевые элементы 85 с опорными поверхностями 86 в совокупности с промежуточными звеньями 87, удерживающими элементами 88 и ведомыми поликонцевыми элементами 89, оснащенными опорными поверхностями 90, образуют силовой привод пуансонов прессования 81, а через тяги 83 - пуансонов прессования 82. Общие ведущие опорные элементы 85 с опорными поверхностями 91 в совокупности с промежуточными звеньями 92, удерживающими элементами 93 и ведомыми поликонцевымн элементами 94, оснащенными опорными поверхностями 95, образуют силовой привод пуансонов выпрессовки 84. Аналогично соответствующими группами опорных поверхностей, промежуточных звеньев и ведомых поликонцевых элементов могут быть образованы силовые приводы других исполнительных органов пресса.
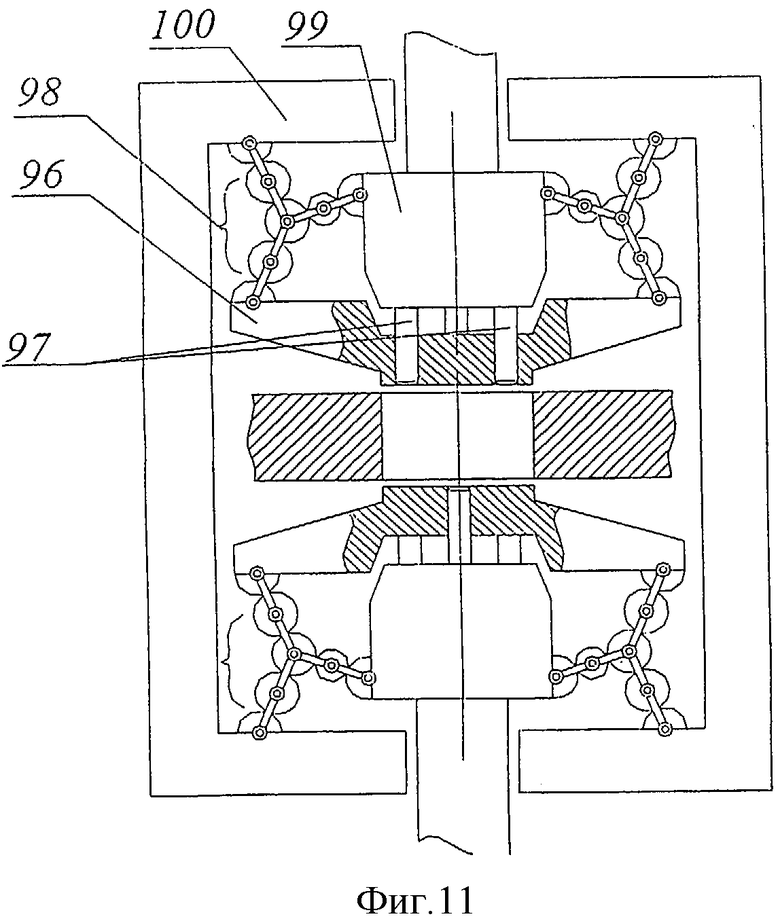
Для формования сложных изделий из уплотняемого материала, например пустотного кирпича, механизм прессования аксоидных прессов согласно Фиг.8, 9 и 10 может оснащаться (см. Фиг.11) пуансонами, состоящими из плит прессования 96 и пальцев 97, причем привод плит прессования 96 осуществляются УСАМом 98, выполненным, например, по Фиг.2 от держателей 99 привода пальцев 97, являющимся его ведущим поликонцевым элементом, опорный поликонцевой элемент 100 может являться элементом станины пресса. С другой стороны, привод этого устройства является примером реализации УСАМа по Фиг.3.b.
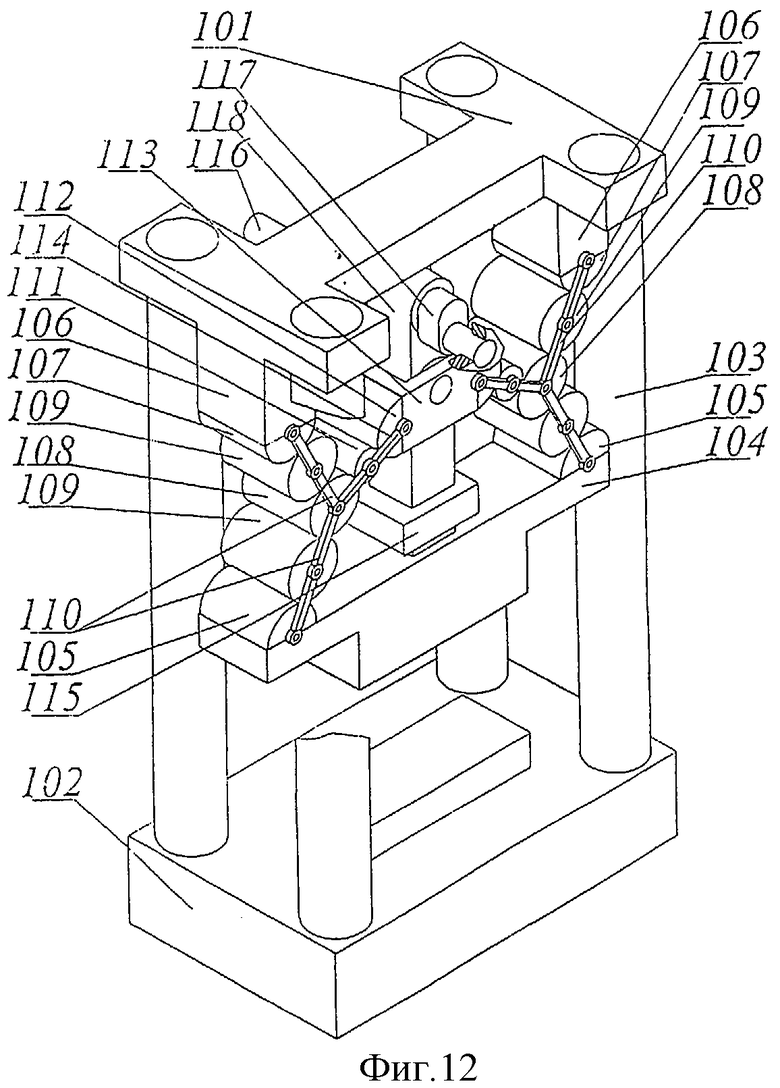
Аксоидный пресс, показанный на Фиг.12, для наглядности представлен сходным с классической компоновкой прессов. Он содержит станину, состоящую из верхней плиты 101, основания 102 и колонн 103, ползун 104, являющийся ведомым поликонцевым элементом УСАМа, оснащенным опорными поверхностями 105. Опорный поликонцевой элемент 106 закреплен на верхней плите 101 и оснащен опорными поверхностями 107. Опорные поверхности 108 являются промежуточными поликонцевыми элементами УСАМа, показанного на Фиг.3.b. Промежуточные звенья 109 фиксируются во взаимодействии с опорными поверхностями 105, 107 и 108 удерживающими элементами 110. Промежуточные звенья 111 фиксируются во взаимодействии с опорными поверхностями 112 ведущего поликонцевого элемента 113 и промежуточными поликонцевыми элементами 108 удерживающими элементами 114.
Ведущий поликонцевой элемент 113, имеющий возможность возвратно-поступательного перемещения по направляющей 115, является частью привода, выполненного, например, в виде кривошипно-ползунного механизма, включающего в себя вал 116 с кривошипом 117 и шатун 118. Очевидно, что в указанном кривошипно-ползунном механизме трение может присутствовать, но при значениях нормальных составляющих реакций в соответствующих направляющих и шарнирах несравненно более низких, чем усилия, действующие в УСАМе, поэтому вредное влияние трения в таком прессе существенно снижается по сравнению с прессами, оснащенными традиционными приводами.
Работа УСАМа с двумя силовыми контурами, схема которого показана на Фиг.1, может быть рассмотрена раздельно для каждого контура.
При перемещении ведущего поликонцевого элемента 1 по направляющей 15 вверх от исходного положения, движение и усилие от него посредством аксоидно катящихся друг по другу опорных поверхностей 2, 4 и промежуточных звеньев 10 передаются промежуточным поликонцевым элементам 3, которые поступательно перемещаются друг от друга. При этом опорные поверхности 4, катясь аксоидно, взаимодействуя с опорными поверхностями 6 и 8 через промежуточные звенья 12 и 14, передают усилия на промежуточный опорный поликонцевой элемент 5 и ведомый поликонцевой элемент 7, вследствие чего последний перемещается вниз по направляющим 26 до тех пор, пока геометрические оси опорных поверхностей 4, 6, 8 и промежуточных звеньев 12 и 14 не окажутся в одной вертикальной плоскости. Параметры всех опорных поверхностей первого силового контура могут быть подобраны таким образом, что названное положение будет достигнуто при расположении геометрических осей опорных поверхностей 2, 4 и промежуточных звеньев 10 в одной горизонтальной плоскости. Такой подбор параметров опорных поверхностей позволяет обеспечить максимальное отношение усилия на промежуточном опорном поликонцевом элементе 5 к усилию на ведущем поликонцевом элементе 1. Если имеются помехи, стремящиеся исказить траекторию промежуточного опорного поликонцевого элемента 5, то в качестве дополнительного средства поддержания этой прямолинейности могут быть предусмотрены направляющие 25.
Работа второго силового контура во многом связана с работой первого силового контура УСАМа, так как перемещение промежуточного опорного поликонцевого элемента 5 полностью передается на второй контур.
При синхронном перемещении ведущих поликонцевых элементов 17 друг к другу от привода любого известного вида усилия от них передаются опорному поликонцевому элементу 19 и промежуточному опорному поликонцевому элементу 5, перемещающемуся вниз по направляющим 25, посредством аксоидного качения друг по другу опорных поверхностей 16, 18, 20 и промежуточных звеньев 22 и 24 до тех пор, пока геометрические оси опорных поверхностей 16, 18, 20 и промежуточных звеньев 22 и 24 не окажутся в соответствующих вертикальных плоскостях. При дальнейшем сближении ведущих поликонцевых элементов 17 ведомый поликонцевой элемент 19 начинает перемещаться вниз. Направляющие 26, аналогично направляющим 25, служат в качестве дополнительного средства поддержания прямолинейности траектории движения.
Привод первого и второго силовых контуров может осуществляться от отдельных источников движения или одного источника, обеспечивающего передачу движения на различные приводные поликонцевые элементы, в любой последовательности. Например, величина рабочего хода ведомого поликонцевого элемента 7 первого силового контура может соответствовать величине остаточной деформации обрабатываемого материала от прилагаемого этим силовым контуром усилия, а общий ход промежуточного опорного поликонцевого элемента второго силового контура может быть равен нескольким рабочим ходам поликонцевого элемента 7. При этом необходимое перемещение и фиксация положения промежуточного поликонцевого элемента 5 выполняются приводом второго силового контура во время холостого хода первого силового контура, то есть возврата в исходное положение ведомого поликонцевого элемента 7.
УСАМ, показанный на Фиг.2, работает следующим образом.
Внутри опорного поликонцевого элемента 27, при синхронном перемещении от привода ведущих поликонцевых элементов 29 и 29а друг от друга перемещения и усилия от них передаются ведомым поликонцевым элементам 32 и 32а за счет аксоидного качения друг по другу опорных поверхностей 31, 31а и 28, 28а через промежуточные звенья 35, 35а и опорных поверхностей 30, 30а и 33, 33а через промежуточные звенья 37, 37а. Ведомые поликонцевые элементы 32, 32а совершают прямолинейное поступательное перемещение по траектории, обеспечиваемой степенями подвижности силового контура. Работа силовых контуров может осуществляться синхронно, например, в случае его использования в прессе с возможностью двухстороннего прессования, тогда ведомые поликонцевые элементы 32 и 32а синхронно перемещаются друг к другу. Реверс на ведущих поликонцевых элементах 29 и 29а ведет к реверсу ведомых поликонцевых элементов 32 и 32а. Аналогично варианту, показанному на Фиг.1, привод этих силовых контуров может осуществляться и разновременно.
УСАМ, симметричный относительно плоскости Х-Х, приведенный на Фиг.3, работает следующим образом.
При перемещении ведущего поликонцевого элемента 38 вниз по направляющим 53 от любого известного вида привода опорные поверхности 39 при аксоидном качении по промежуточным звеньям 47 вызывают синхронные перемещения промежуточных поликонцевых элементов 40 друг от друга. При этом опорные поверхности 41, совершая аксоидное качение по промежуточным звеньям 49 и 50, в свою очередь вызывают перемещения ведомых поликонцевых элементов 42 и 44 друг от друга. В варианте с обоими подвижными ведомыми поликонцевыми элементами (Фиг.3.а.) промежуточные опорные поликонцевые элементы 40 перемещаются по направляющим 52, ведомый поликонцевой элемент 42 перемещается вверх, а ведомый поликонцевой элемент 44 - синхронно вниз. В варианте с одним неподвижным ведомым поликонцевым элементом (см. Фиг.3.b.) промежуточные поликонцевые элементы 40 перемещаются по дуговым траекториям с осями, совпадающими с геометрическими осями опорных поверхностей 43, а ведомый поликонцевой элемент 44 перемещается вниз при неподвижном ведомом поликонцевом элементе 42, являющемся в этом случае опорным поликонцевым элементом.
В УСАМах без промежуточных поликонцевых элементов (см. Фиг.4, 5, 6, 7) при синхронном перемещении ведущих поликонцевых элементов 54 от исходного положения (для варианта по Фиг.4 - друг к другу, для варианта по Фиг.5 - друг от друга) промежуточные звенья 59, совершая аксоидное качение по опорным поверхностям 56 и 57, передают от ведущих поликонцевых элементов 54 движение и усилия ведомым поликонцевым элементам 55, которые перемещаются друг от друга синхронно относительно оси симметрии Y-Y. При этом по мере приближения механизма к положению, когда геометрические оси опорных поверхностей 56 ведущих элементов 54 находятся в плоскостях, проходящих через геометрические оси опорных поверхностей 57 ведомых поликонцевых элементов 55 (далее по тексту "мертвая точка"), усилия на ведомых поликонцевых элементах по отношению к усилиям на ведущих поликонцевых элементах возрастают, а скорости - уменьшаются. Значения усилия на ведомых поликонцевых элементах определяются противодействием их движению, а усилия на ведущих поликонцевых элементах - усилием на ведомых поликонцевых элементах и отношением усилий на ведомых поликонцевых элементах к усилиям на ведущих поликонцевых элементах. Для вариантов по Фиг.4 и 5 движение ведущих поликонцевых элементов 54 от привода прекращается в момент достижения положения "мертвая точка" или, если это требуется, через некоторое относительно малое расстояние после прохождения положения "мертвая точка"; для варианта, в котором область перемещения геометрических осей опорных поверхностей ведущих поликонцевых элементов располагается по обе стороны от плоскостей, проходящих через геометрические оси опорных поверхностей ведомых поликонцевых элементов, движение ведущих поликонцевых элементов 54 продолжается до второго крайнего положения, вследствие чего движение ведомых поликонцевых элементов меняет направление.
При обратном движении ведущих поликонцевых элементов, если оно началось за "мертвой точкой", ведомые поликонцевые элементы 55, которые немного отошли назад от предельного положения, снова доходят до этого предельного положения, что для некоторых технологических процессов является очень желательным, и только после прохождения механизмом положения "мертвая точка" движутся к своему исходному положению, которое достигается при возвращении ведущих поликонцевых элементов 54 в первоначальное положение.
Прессование в аксоидном прессе, показанном на Фиг.8, происходит следующим образом. От привода (не показан) ведущие поликонцевые элементы 68 УСАМа синхронно перемещаются навстречу друг другу по направляющим станины 69, приводя в симметричное относительно станины 69 перемещение ведомых поликонцевых элементов 65 и 66, причем ведомый поликонцевой элемент 65 перемещает вниз верхний пуансон 64, а ведомый поликонцевой элемент 66 - нижний пуансон 64 через тяги 67. Максимальное сближение пуансонов 64 и максимальное усилие, которое может быть преодолено приводом, достигается в момент, когда геометрические оси опорных поверхностей ведущих 68 и ведомых 65 и 66 поликонцевых элементов УСАМа располагаются в двух параллельных плоскостях ("мертвая точка"). Если привод отрегулирован так, что УСАМ несколько переходит через положение "мертвая точка", то при этом происходит некоторое перемещение пуансонов 64 друг от друга, упрощая удаление из формуемой смеси воздуха для предотвращения расслоения прессуемого изделия от давления оставшегося в нем воздуха, а при возвратном ходе ведущих поликонцевых элементов 68 пуансоны вновь сближаются при прохождении "мертвой точки", чтобы далее потом полностью разойтись в исходное положение. Таким образом происходит двухкратное прессование изделия, что способствует более высокому качеству прессования.
При получении от привода симметричного движения ведущих поликонцевых элементов 73 друг от друга в аксоидном прессе, показанном на Фиг.9, ведомые поликонцевые элементы 76 и 77 также симметрично перемещаются друг от друга, причем каждый из них перемещает от центра по одному пуансону 74, а через тяги 78 - к центру по одному пуансону 75, вследствие чего обеспечивается двухстороннее прессование изделия в двух пресс-формах 71. Так как каждый из ведомых поликонцевых элементов 76 и 77 приводит в действие по одному пуансону в каждой из пресс-форм, где производится одновременное прессование двух изделий, обеспечиваются одинаковые нагрузки на эти ведомые поликонцевые элементы 76 и 77, даже если сопротивления в различных пресс-формах различны, что способствует уменьшению реакций в направляющих и трения в них.
При симметричном перемещении общих ведущих поликонцевых элементов 85 в аксоидном прессе варианта, показанного на Фиг.10, движение и усилия через опорные поверхности 86, 90 и промежуточные звенья 87 симметрично передаются двум ведомым поликонцевым элементам 89, связанным с пуансонами прессования 81 и через тяги 83 с пуансонами прессования 82, совершающими двухстороннее прессование; через опорные поверхности 91, 95 и промежуточные звенья 92 движение и усилия симметрично передаются ведомым поликонцевым элементам 94, связанным с пуансонами выпрессовки 84, выпрессовывающими готовые изделия. Аналогично движения и усилия от общих ведущих поликонцевых элементов 85 могут передаваться другим ведомым поликонцевым элементам (не показаны), связанным с другими исполнительными органами пресса. В этом варианте кроме обеспечения привода от одного УСАМа достигается высокая степень синхронизации работы его исполнительных органов.
Пуансон прессования любого из аксоидных прессов, показанных на Фиг.8, 9 и 10, состоящий из плиты прессования и пальцев, показанный на Фиг.11, работает следующим образом: при совершении пальцами 97 с держателями 99 движения прессования от привода прессования движение от держателей 99, конструктивно связанных с ведущими поликонцевыми элементами, передается УСАМу 98, ведомые поликонцевые элементы которых связаны с плитами прессования 96, перемещающихся для прессования и запирания пресс-формы в конечном положении, причем при положениях УСАМов, близких к "мертвой точке", перемещения плит прессования 96 очень малы при значительных перемещениях пальцев 97. Вследствие этого окончательное прессование изделия осуществляют пальцы 97, расположенные с двух сторон в шахматном порядке, позволяя осуществить более равномерное распределение уплотнения по объему изделия и однородную его прочность, а плиты прессования 96 удерживают пресс-форму в запертом состоянии. При этом опорный поликонцевой элемент 100 уравновешивает реакции усилий обоих силовых контуров УСАМа 98.
Аксоидный пресс, показанный на Фиг.12, работает следующим образом. Движение привода пресса (см. поз.116-118) преобразуется в возвратно-поступательное движение ведущего поликонцевого элемента в виде ползуна 113, от которого движение и усилия через опорные поверхности 112, совершающие аксоидное качение по промежуточным звеньям 111, передаются промежуточным поликонцевым элементам 108 и далее - ведомому поликонцевому элементу в виде ползуна 104, совершающего вертикальное возвратно-поступательное движение, оказывая технологическое воздействие на изделие (не показано), причем его нижнее положение соответствует положению "мертвой точки" УСАМа.
Таким образом, настоящее изобретение позволяет использовать для наиболее нагруженных элементов - опорных поверхностей материалы, не нуждающихся в высоких антифрикционных свойствах ввиду отсутствия в них трения, но обладающих высокой твердостью, например шарикоподшипниковые стали, допускающие контактные напряжения при контакте по линии до 350 кГс/мм2 [1]. Это создает возможность в несколько (до 6 и более) раз повысить их силовые характеристики в сравнении с равновеликими шарнирно-рычажными механизмами; значительно уменьшает потери энергии и износ в оборудовании за счет уменьшения трения; существенно упрощает проблемы смазки и охлаждения; способствует решению задач механизации и автоматизации оборудования.
Источник информации
1. Перель Л.Я., Филатов А.А. Подшипники качения: расчет, проектирование и обслуживание опор: Справочник. - 2-е изд., перераб. и доп. М.: Машиностроение.
| название | год | авторы | номер документа |
|---|---|---|---|
| РЫЧАЖНЫЙ ПРЕСС ДЛЯ ФОРМОВАНИЯ ИЗДЕЛИЙ ИЗ ПОРОШКОВЫХ МАТЕРИАЛОВ | 1992 |
|
RU2085370C1 |
| Устройство для полусухого прессования строительных изделий | 1991 |
|
SU1794026A3 |
| РЫЧАЖНЫЙ ПРЕСС ДЛЯ ФОРМОВАНИЯ ИЗДЕЛИЙ ИЗ ПОРОШКОВЫХ МАТЕРИАЛОВ | 1991 |
|
RU2018444C1 |
| УСТРОЙСТВО ДЛЯ ПРЕССОВАНИЯ СТРОИТЕЛЬНЫХ ИЗДЕЛИЙ | 1992 |
|
RU2054994C1 |
| РЫЧАЖНЫЙ ПРЕСС ДЛЯ ФОРМОВАНИЯ ИЗДЕЛИЙ ИЗ ПОРОШКОВЫХ МАТЕРИАЛОВ | 1993 |
|
RU2085369C1 |
| УСТРОЙСТВО ДЛЯ ОБРАЗОВАНИЯ ПУСТОТ В СТРОИТЕЛЬНЫХ ИЗДЕЛИЯХ ПРЕССА ПОЛУСУХОГО ПРЕССОВАНИЯ | 1992 |
|
RU2038970C1 |
| Роторный пресс | 1981 |
|
SU969541A1 |
| СПОСОБ ПОЛУСУХОГО ПРЕССОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2378110C2 |
| СМЕСИТЕЛЬ-АКТИВАТОР | 1998 |
|
RU2134197C1 |
| ПУСТОТНЫЙ КИРПИЧ | 1995 |
|
RU2108430C1 |
Уравновешенный силовой аксоидный механизм и аксоидный пресс относятся к машиностроению, в частности к механизмам преобразования силовых и скоростных параметров поступательных движений на основе силовых аксоидных механизмов, в которых трение устранено за счет замены скольжения на аксоидное качение и взаимного уравновешивания нормальных составляющих реакций в опорных элементах нового уравновешенного силового аксоидного механизма. Механизм представляет замкнутую систему силовых аксоидных механизмов, содержащих концевые элементы, имеющие возможность поступательного перемещения каждый в своем направлении, оснащенные опорными поверхностями, и промежуточное звено, состоящее из контактных элементов с опорными поверхностями, взаимодействующими с опорными поверхностями концевых элементов так, что при перемещении одного концевого элемента обеспечивается их взаимное аксоидное качение без проскальзывания с передачей усилий и движения другому концевому элементу, объединенных посредством поликонцевых элементов в один и более силовых контуров. На основе названных уравновешенных силовых аксоидных механизмов предлагается выполнить привод исполнительных органов и прежде всего силового механизма аксоидных прессов, в которых, по сравнению с традиционными силовыми механизмами, существенно увеличиваются долговечность, силовые параметры прессования и снижается трение, износ и затраты, связанные с их смазкой, охлаждением и восстановлением. 2 н. и 10 з.п. ф-лы, 12 ил.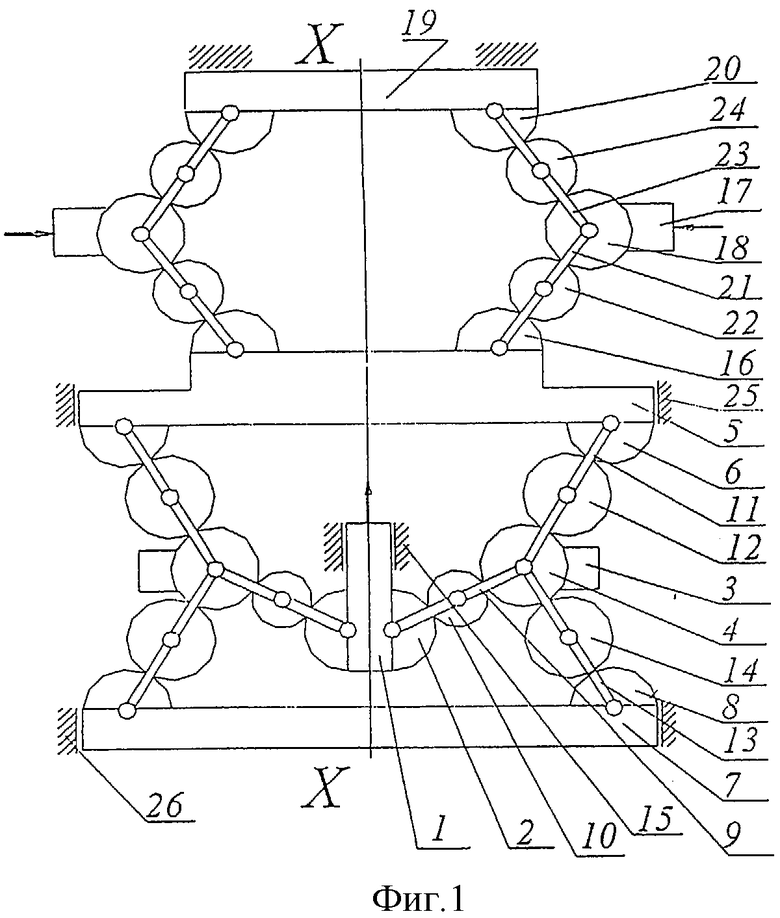
| Крайнев А.К | |||
| Механика машин | |||
| Фундаментальный словарь | |||
| - М.: Машиностроение, 2000, с.267, схемы а), д) | |||
| Крайнев А.К | |||
| Механика машин | |||
| Фундаментальный словарь | |||
| - М.: Машиностроение, 2000, с.204, схема б) | |||
| Электромагнитный телеграфный приемник | 1923 |
|
SU482A1 |
| DE 4401499 А, 03.08.1995 | |||
| JP 58212900 А, 10.12.1983. | |||

