Область техники, к которой относится изобретение
Настоящее изобретение относится к способу получения информации о согласовании между приемником и формацией, в частности о согласовании между геофоном и формацией.
Предпосылки создания изобретения
При проведении сейсмической разведки для излучения сейсмической волны возбуждают источник, а получающееся в результате сейсмическое волновое поле измеряют посредством группы сейсмических приемников, отнесенных от сейсмического источника. На каждом приемнике регистрируют сейсмические данные, обычно в виде записи или «трассы», характеризующей зависимость значения некоторой характеристики сейсмического волнового поля от времени. Собранные сейсмические данные представляют собой представление сейсмического волнового поля в месте расположения приемника. На основании собранных сейсмических данных может быть получена информация о нижних горизонтах геологической среды.
Одним сейсмическим приемником хорошо известного типа является сейсмический геофон. Геофон содержит в корпусе один или несколько датчиков, закрепленных в корпусе. Геофон может быть однокомпонентным геофоном, который содержит один датчик, с помощью которого регистрируют компоненту сейсмического волнового поля, параллельную предварительно определенному направлению. Например, информацию о вертикальной компоненте сейсмического волнового поля можно получать, используя однокомпонентный геофон, ориентированный таким образом, что направление приема геофона является, по существу, вертикальным. В качестве альтернативы геофон может быть трехкомпонентным геофоном, который содержит три датчика, ориентированных так, что обеспечивается регистрация компонент сейсмического волнового поля в трех ортогональных направлениях (обычно обозначаемых как оси х, у и z геофона).
Геофон может быть размещен просто путем помещения корпуса геофона на поверхность формации. Это может быть сделано при проведении наземных сейсмических исследований или при проведении морских сейсмических исследований, когда геофоны размещают на дне моря. В качестве альтернативы известны геофоны, у которых корпус снабжен штырем, и такие геофоны устанавливают, вонзая штырь в поверхность формации. Снабженные штырями геофоны, как правило, находят ограниченное применение при наземной сейсмической разведке.
Для обеспечения точного измерения сейсмического волнового поля геофон должен быть хорошо согласован с поверхностью формации. Выходной сигнал геофона представляет собой свертку сейсмического волнового поля с передаточной функцией связи между формацией и геофоном. Передаточная функция отражает то, что общеизвестно как «согласование» геофона. Если согласование между геофоном и формацией идеальное, передаточная функция равна единице на всех частотах, а выходной сигнал является хорошим представлением сейсмического волнового поля. Однако если передаточная функция не равна единице на всех рассматриваемых частотах, то выходной сигнал геофона является искаженным представлением сейсмического волнового поля. При использовании многокомпонентного геофона должна быть отдельная передаточная функция для каждой компоненты сейсмического волнового поля, принимаемой геофоном, или, если взаимными эффектами нельзя пренебречь, многоканальная передаточная функция.
Описание уровня техники
Исследование передаточной функции геофона является предметом нескольких публикаций. С некоторого времени признается, что перемещение корпуса геофона, опирающегося на поверхность формации, не то же самое, что перемещение формации, которое наблюдается при отсутствии корпуса геофона. Согласование между геофоном и формацией исследовали Washburn H. и Wiley H. в "The effect of the placement of a seismometer on its response characteristics". Geophysics, Soc. of Explor. Geophys., 06, 116-131 (1941), и Wolf А. в "The equation of motion of a geophone on the surface of an elastic earth". Geophysics, Soc. of Expl. Geophys., 09, 29-35 (1944). Однако эти классические теоретические работы основаны на модели геофона с плоским основанием, опирающимся на поверхность формации, и поэтому следует ожидать иного согласования с формацией для геофона со штырем, широко используемого в настоящее время.
Drijkoningen G.G. в "The usefulness of geophone ground-coupling experiments to seismic data", Geophysics, Soc. of Expl. Geophys., 65, 1780-1787 (2000), привел отчет о полевых экспериментальных работах по согласованию геофона и предложил систему с двумя состояниями для объяснения явлений, которые наблюдаются в случае размещения штыревых геофонов: связи через штырь и гравитационной связи. Соответственно эти два состояния соответствуют устойчиво установленному геофону и геофону с опирающимся корпусом. При первом состоянии резонансная частота связи (по меньшей мере для геофонов с приемом вертикальной компоненты) находится за пределами сейсмического диапазона частот, но во втором случае (гравитационной связи) в зависимости от уплотненности почвы резонансная частота связи может быть в пределах сейсмического диапазона частот и, следовательно, может влиять на амплитуду и фазу сигнала, регистрируемого с помощью геофона. В этом случае сигнал, регистрируемый с помощью геофона, больше не пропорционален скорости частиц формации. (Термин «резонансная частота связи» обозначает частоту, на которой резонанс, возникающий в результате связи геофона с формацией, наблюдается в передаточной функции.) Гравитационная связь относится к механизму, который положен в основу большей части сейсмических исследований на дне моря, но нежелателен при проведении наземных сейсмических исследований, где предполагается, что доминирующим механизмом должна быть связь через штырь.
Krohn C.E. в "Geophone ground coupling". Geophysics, Soc. of Expl. Geophys., 49, 722-731 (1984) привел отчет о лабораторных и мелкомасштабных полевых экспериментальных исследованиях, из которых следует вывод о том, что хорошая установка современных геофонов, принимающих вертикальную компоненту, имеющих штыри длиной вплоть до 5 дюймов, возможна в случае проведения обычных сейсмических исследований при использовании частот вплоть до 100 Гц и когда скорость частиц на геофоне меньше 10-2 см/с. Однако принимая во внимание коммерческую сторону сейсмических исследований, качество установки геофонов нельзя гарантировать на всем протяжении исследуемой площади, и кроме того, уже после установки возможно нарушение хорошей установки. Более того, на площадях, покрытых песком, часто используют геофоны без штырей, углубленные на несколько сантиметров ниже поверхности. Поэтому чрезвычайно желателен простой способ обнаружения плохого согласования, позволяющий корректировать данные, полученные с помощью плохого согласования геофона с формацией для компенсации плохого согласования.
При развертывании многокомпонентного геофона согласование между геофоном и одной компонентой сейсмического волнового поля может быть лучше по сравнению с согласованием между геофоном и другой компонентой сейсмического волнового поля. В патенте США №5724307 предложен способ, предназначенный для определения фильтра, корректирующего неидеальное согласование геофона по отношению к поперечной компоненте сейсмического волнового поля в предположении, что геофон идеально согласован по отношению к продольной компоненте сейсмического волнового поля. Однако этот способ дает хорошие результаты только в случае, если геофон хорошо согласован по отношению к продольной компоненте сейсмического волнового поля.
В патенте США №5724306 предложен способ, предназначенный для определения фильтра, корректирующего неидеальное согласование геофона по отношению к компоненте сейсмического волнового поля. Этот способ применим к сейсмическому приемнику, который содержит геофон и гидрофон, и основан на предположении о том, что гидрофон согласован идеально. Однако этот способ не может быть применен к приемнику, который не содержит гидрофона, и поэтому не может быть использован при наземной сейсмической разведке.
Краткое описание изобретения
Первый объект настоящего изобретения относится к способу получения информации о согласовании сейсмического приемника и этот способ включает в себя определение спектра мощности для записи, зарегистрированной на сейсмическом приемнике, и получение информации о согласовании приемника на основании спектра мощности. (Термин «запись» обычно означает запись значения некоторой характеристики сейсмического волнового поля в зависимости от времени и предполагается охватывающим запись, например, в виде числовых значений, хранящихся в запоминающем устройстве, в виде визуального отображения или «трассы», отражающей зависимость характеристики от времени и т.д.). Известно использование спектров мощности для идентификации характерных для эпицентра колебаний в сейсмологии землетрясений, но в этом способе из известного уровня техники предполагается, что разброс характеристик между датчиками, обусловленный согласованием датчика с формацией, пренебрежимо мал (и это предположение является правильным для датчиков, используемых в сейсмологии).
Способ может включать в себя сравнение определенного спектра мощности с эталонным спектром мощности. Когда априорный спектр мощности имеется в распоряжении для приемника, определенный спектр мощности можно сравнить с априорным эталонным спектром мощности, и этим обеспечивается простой путь получения информации о согласовании приемника.
Если априорный эталонный спектр мощности недоступен, способ может включать в себя оценку эталонного спектра мощности на основании зарегистрированных записей. Например, приемник может быть одним из группы сейсмических приемников, а способ может включать в себя определение эталонного спектра мощности для группы сейсмических приемников. Затем эталонный спектр мощности может быть использован для получения информации о согласовании каждого приемника в группе.
Эталонный спектр мощности может быть получен на основании спектров мощности каждой записи (трассы), зарегистрированной на каждом приемнике в группе. Однако в этом имеется потенциальный недостаток, заключающийся в том, что оцененный эталонный спектр мощности может не полностью представлять хорошо согласованный геофон, если один или несколько приемников в группе не согласован (согласованы) хорошо. Поэтому в предпочтительном варианте осуществления изобретения эталонный спектр мощности определяют на основании спектров мощности выбранных сигналов, зарегистрированных с помощью приемников группы.
В качестве альтернативы способ может включать в себя определение первого спектра мощности для первой записи, зарегистрированной на первом сейсмическом приемнике; определение второго спектра мощности для второй записи, зарегистрированной на втором сейсмическом приемнике, пространственно отнесенном от первого сейсмического приемника, при этом вторую запись регистрируют, по существу, одновременно с первым сигналом; и получение информации о согласовании одного из приемников на основании первого и второго спектров мощности.
Способ может включать в себя идентификацию одного из первого и второго приемников как эталонного приемника на основании первого и второго спектров мощности. Он может включать в себя получение информации о согласовании другого из первого и второго приемников по отношению к согласованию эталонного приемника.
Эта или каждая запись может быть записью шума. При проведении сейсмической разведки запись шума получают сразу же после подключения приемников. Поэтому использование записи шума позволяет получать информацию о согласовании до возбуждения сейсмического источника. В случае импульсного или непрерывного источника сигналы, которые приходят на приемник после возбуждения сейсмического источника, но до первого вступления сейсмической волны от источника, также должны быть отнесены к «шуму». Однако запись не ограничена записью шума и может быть записью самой отраженной сейсмической волны.
Полученная информация о согласовании может содержать резонансную частоту связи и/или коэффициент демпфирования связи.
Информация о согласовании приемника может быть учтена при обработке сейсмических данных, зарегистрированных на приемнике. Например, способ может дополнительно включать в себя этап определения оператора коррекции согласования на основании полученной информации о согласовании. Использование настоящего изобретения позволяет находить, например, резонансную частоту связи и коэффициент демпфирования связи, необходимые для получения оператора коррекции согласования, который корректирует сейсмические данные, зарегистрированные на приемнике, при наличии влияния неидеального согласования приемника. Это может быть сделано в соответствии с моделью, которую предложили Washburn и Wiley (см. выше).
Способ может включать в себя применение оператора коррекции согласования во время обработки сейсмических данных. Оператор коррекции согласования должен определяться для конкретного приемника и должен применяться во время обработки сейсмических данных, зарегистрированных на этом приемнике. При проведении практической сейсмической разведки соответствующий оператор коррекции согласования может быть определен для каждого приемника (за исключением эталонного приемника в том случае, когда в варианте осуществления используют эталонный приемник), а во время обработки сейсмических данных оператор коррекции согласования должен быть применен состоятельным для приемника образом.
Применением оператора коррекции согласования компенсирует сейсмические данные, обусловленные плохим согласованием приемника, и обеспечивается оценивание данных аналогично тому, как они регистрируются в случае, когда приемник согласован идеально.
Второй объект настоящего изобретения относится к устройству для получения информации о согласовании сейсмического приемника, и это устройство включает в себя средство для определения спектра мощности для записи, зарегистрированной на сейсмическом приемнике; и средство для получения информации о согласовании приемника на основании спектра мощности.
Устройство может содержать программируемый процессор данных.
Изобретение обеспечивает быстрый и точный способ контроля того, согласованы ли приемники в группе приемников соответствующим образом. При наземной сейсмической разведке идентификация любого, плохо согласованного приемника позволит персоналу заменить любой приемник, в отношении которого установлено, что он является плохо согласованным. Когда замена приемников невозможна, использование изобретения позволит ослабить эффекты плохого согласования по время обработки зарегистрированных сейсмических данных. Изобретение может быть использовано при наземной сейсмической разведке или при морской сейсмической разведке, когда приемники размещены на дне моря.
Краткое описание чертежей
Предпочтительные варианты осуществления настоящего изобретения будет описаны только в качестве иллюстративного примера со ссылками на сопровождающие чертежи, на которых:
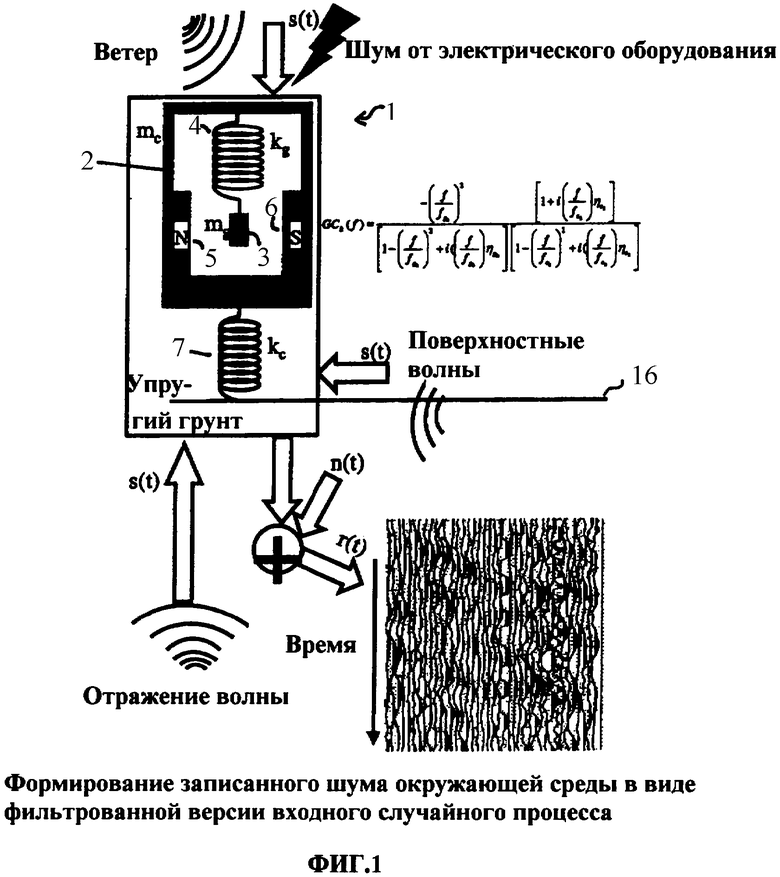
фигура 1 - представляет иллюстрацию модели геофона с показом модели связи геофона с формацией;
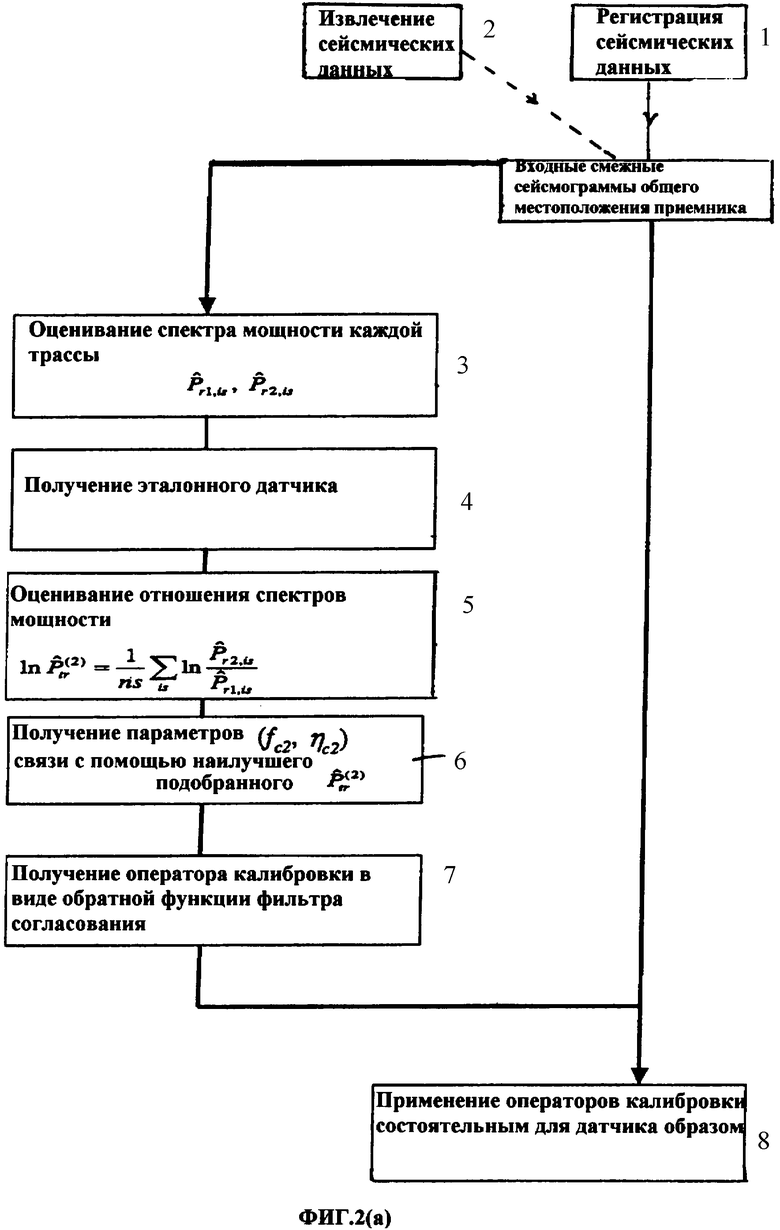
фигура 2(а) - представляет рабочую диаграмму способа согласно настоящему изобретению;
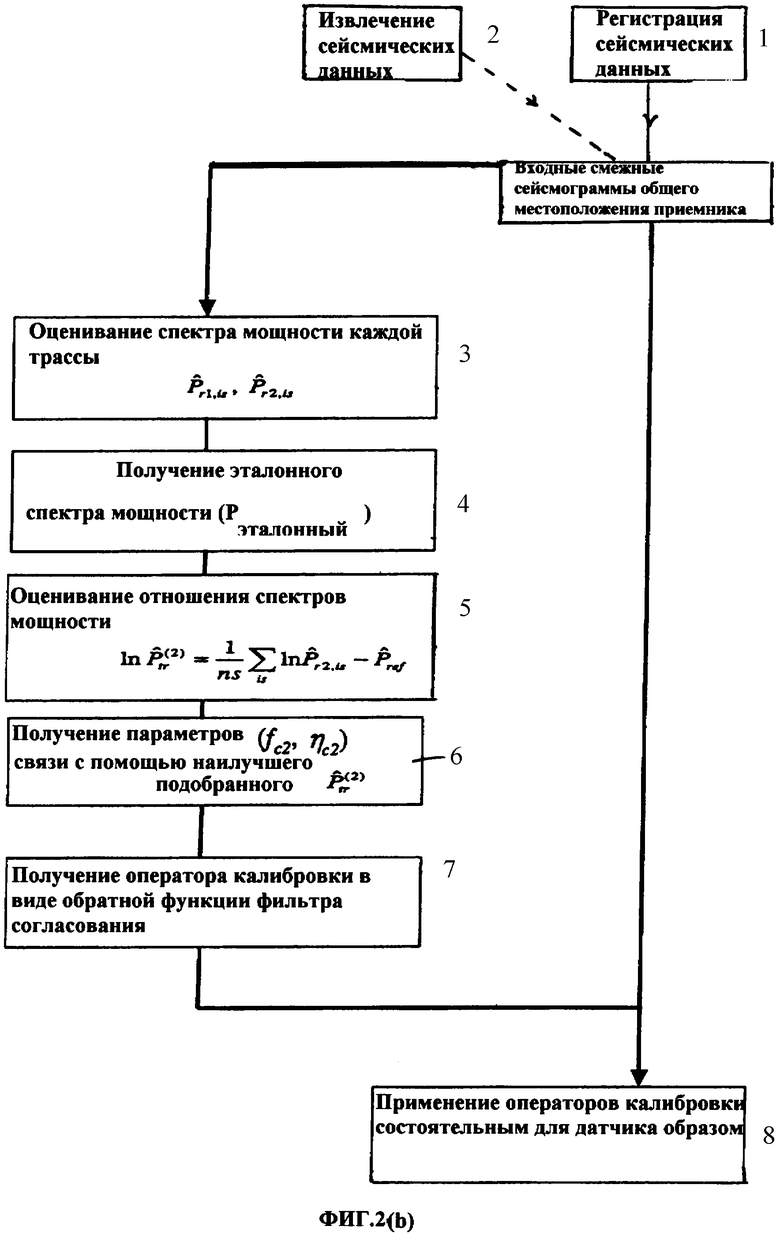
фигура 2(b) - представляет рабочую диаграмму альтернативного варианта способа согласно настоящему изобретению;
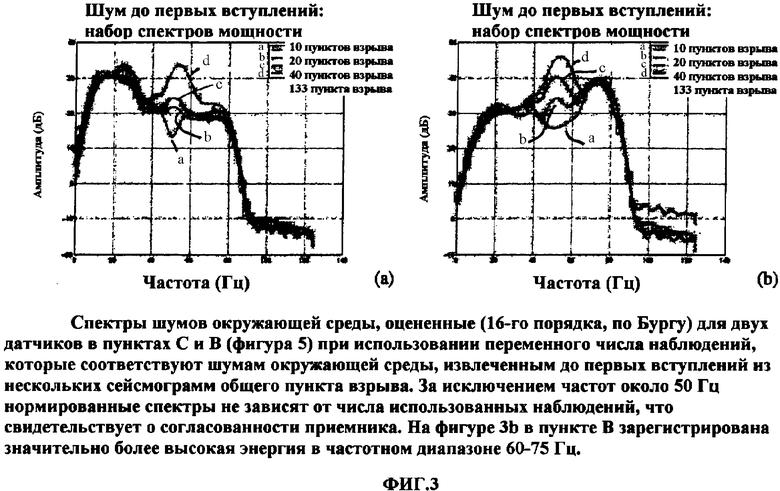
фигуры 3(а) и 3(b) - иллюстрируют спектры шумов окружающей среды, оцененные для двух разнесенных в пространстве геофонов;
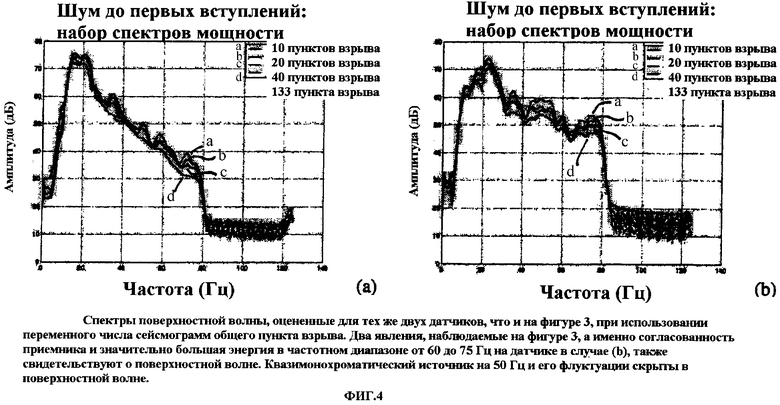
фигуры 4(а) и 4(b) - иллюстрируют спектры поверхностной волны, оцененные для двух геофонов из фигур 3(а) и 3(b);
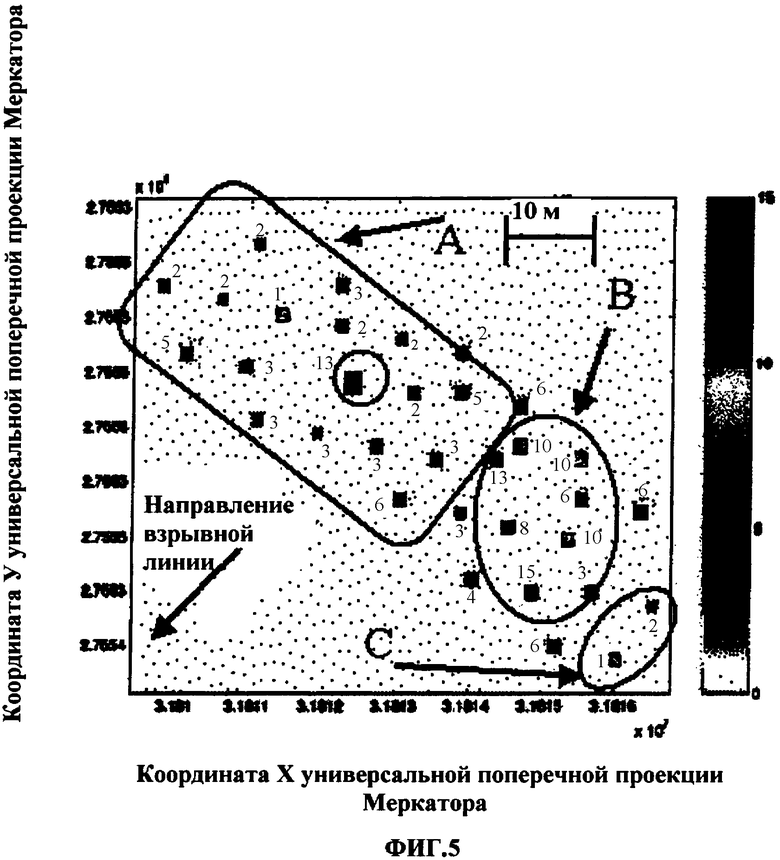
фигура 5 - представляет типичную информацию о согласовании, полученную в соответствии со способом изобретения;
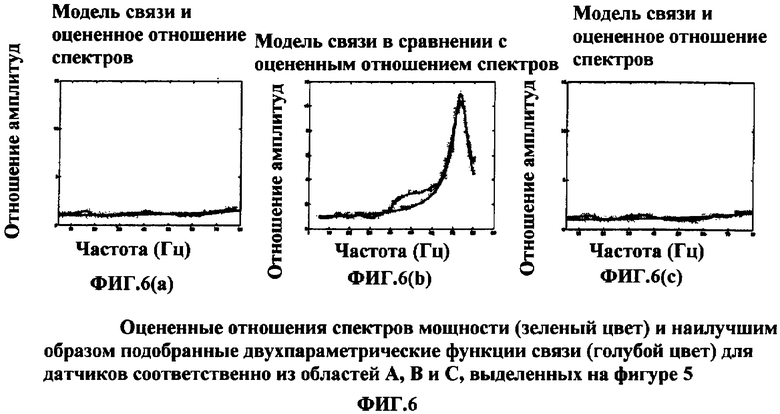
фигуры с 6(а) по 6(с) - иллюстрируют расчетные отношения спектров мощности и функций связи для выбранных датчиков согласно фигуре 5;
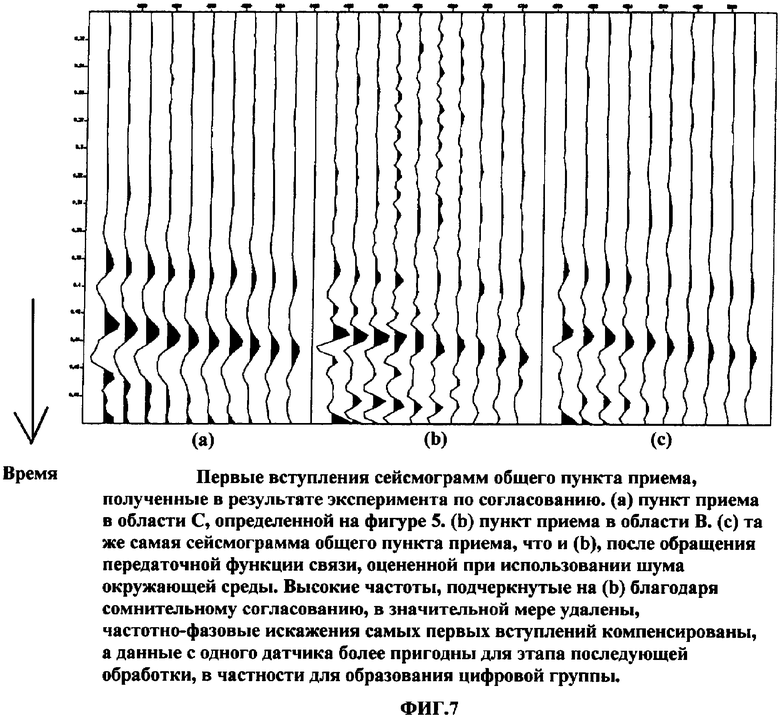
фигуры 7(а) и 7(b) - показывают типичные трассы, зарегистрированные с помощью двух датчиков согласно фигуре 5;
фигура 7(с) - иллюстрирует трассы согласно фигуре 7(b) после обработки способом изобретения; и
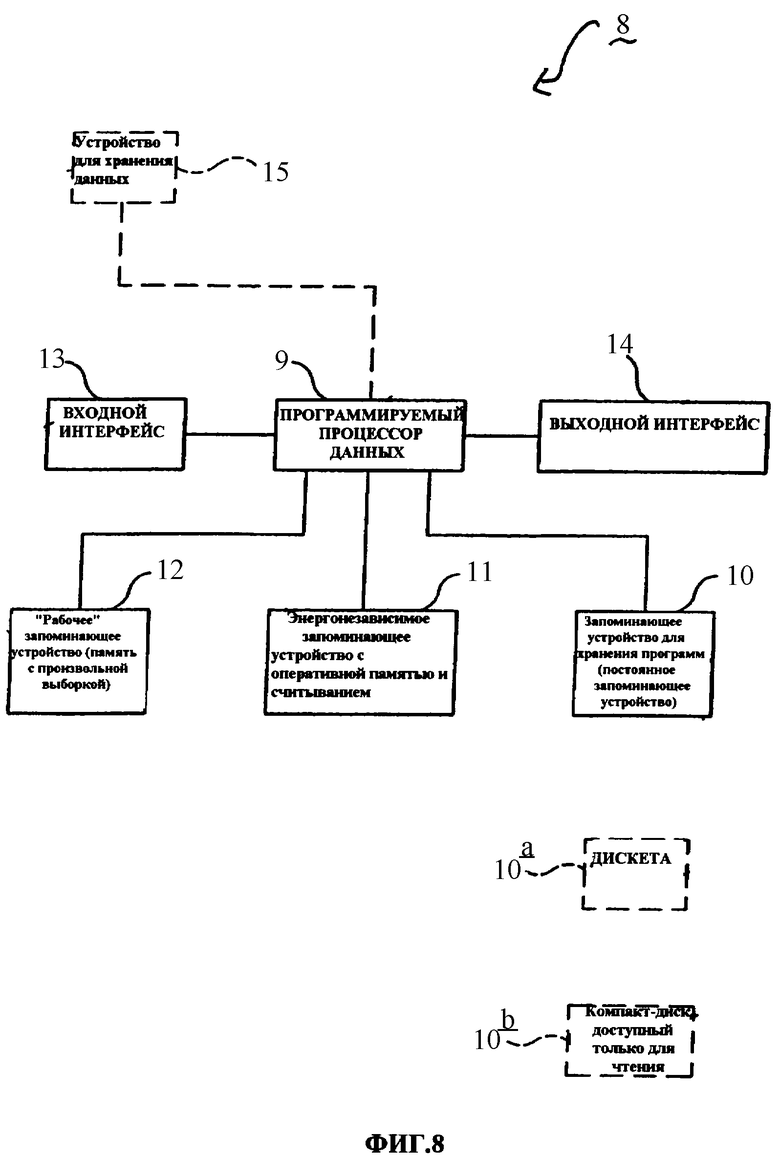
фигура 8 - иллюстрирует устройство согласно настоящему изобретению.
Подробное описание предпочтительных вариантов осуществления
На фигуре 1 представлен схематичный вид геофона 1. Как показано на фиг.1, геофон 1 содержит корпус 2. Катушка 3 геофона массой mg подвешена внутри корпуса посредством пружины 4. Магниты 5, 6 расположены вблизи катушки 3, так что перемещение катушки приводит к возбуждению электрического тока. При практическом использовании перемещения катушки 3 демпфированы, и это может быть отражено коэффициентом ηg демпфирования. Следовательно, в такой модели катушка геофона работает как классический демпфированный гармонический осциллятор.
На фигуре 1 также показана связь корпуса геофона с формацией. И опять эта связь смоделирована в виде демпфированного гармонического осциллятора и отражена посредством второй пружины, «пружины связи» 7, которая соединяет корпус 2 геофона с поверхностью 16 формации. Демпфирование посредством пружины связи характеризуется коэффициентом ηс демпфирования. Общая масса корпуса 2 геофона и его содержимого обозначена mc.
Передаточную функцию для модели геофона из фигуры 1 получена согласно источнику информации Krohn (см. выше). Передаточная функция, приведенная здесь, справедлива для k-того геофона:
где fgk - резонансная частота k-того геофона;
fck - резонансная частота связи для k-того геофона; и
f - частота сейсмического волнового поля.
На фигуре 1 также показан выходной сигнал k-того геофона, который обозначен как rk(t). Имеются два вклада в выходной сигнал. Первая компонента является результатом поступления входных сигналов на геофон и обусловлена отраженной сейсмической волной, падающей на геофон, поверхностными волнами, падающими на геофон, и шумом окружающей среды. Например, типичные причины внешнего шума включают в себя вибрации, обусловленные человеческою деятельностью или активностью животных, ветер, электромагнитные поля, создаваемые линиями энергоснабжения регистрирующего оборудования, грозы, потенциалы Земли, катодную защиту трубопроводов, электрические изгороди, взрывные машинки и радиотехнические средства. Кроме того, в геофоне возникает внутренний шум вследствие двух причин: в результате наличия сопротивления катушки и в результате броуновского (хаотического) движения частиц. Совместный входной сигнал для k-того геофона от этих источников обозначен как sk(t). Этот входной сигнал отфильтровывается посредством связи геофона с формацией и из него образуется выходной сигнал k-того геофона:

Вторым вкладом в выходной сигнал геофона является шум, который не фильтруется посредством связи геофона с формацией, такой, как, например, шум от электронного оборудования, обусловленный электрическими цепями, которые обрабатывают выходной электрический сигнал геофона. Для k-того геофона этот шум в целом обозначен как nk(t).
Поэтому полный выходной сигнал rk(t) от k-того геофона имеет вид:

Рассмотрим систему сейсмической разведки, содержащую два геофона. Если различия в характеристиках приема (чувствительности, резонансной частоте и демпфировании) между двумя геофонами являются пренебрежимо малыми, как предполагается в настоящей заявке, то отношение передаточной функции для одного геофона к передаточной функции для другого геофона содержит только члены, обусловленные механизмом связи, а именно:

где нижние индексы 1 и 2 обозначают соответственно первый и второй геофоны.
Если шум n(t) от электронного оборудования является пренебрежимо малым и если сигналы s1(t) и s2(t), входные для двух геофонов, имеют одинаковые спектры мощности, если даже фазы сигналов могут быть различными, отношение спектра мощности сигнала на выходе одного геофона к спектру мощности сигнала на выходе другого геофона имеет вид:
Как описано ниже, предположение о том, что сигналы, зарегистрированные на двух датчиках, имеют одинаковые спектры мощности, может быть подтверждено.
Однако Рtr(f) неизвестно и его необходимо оценить.
При проведении типичной сейсмической разведки осуществляют возбуждение сейсмического источника, а сейсмическое волновое поле дискретизируют и записывают на нескольких приемниках, расположенных в различных местоположениях. На каждом приемнике записывают в зависимости от времени трассу по меньшей мере одной характеристики волнового поля. Возбуждение сейсмического источника известно как «взрыв», а набор трасс, регистрируемых на различных приемниках по одному взрыву, известен как «сейсмограмма общего пункта взрыва». Во время сейсмической разведки производят несколько взрывов, получая возможность регистрации нескольких наблюдений (трасс) для каждого приемника. Типичный набор трасс, зарегистрированных на одном приемнике, показан на фигуре 1; каждой трассе соответствует отдельный взрыв.
Возможная оценка Ptr(f) имеет вид (зависимость от частоты опущена):
где  - оценка спектров мощности, полученных из трассы, зарегистрированной на первом приемнике по взрыву is; и
- оценка спектров мощности, полученных из трассы, зарегистрированной на первом приемнике по взрыву is; и
 - оценка спектров мощности, полученных из трассы, зарегистрированной на втором приемнике по взрыву is.
- оценка спектров мощности, полученных из трассы, зарегистрированной на втором приемнике по взрыву is.
Альтернативная оценка спектрального отношения

представляет собой решение методом наименьших квадратов переопределенной системы линейных уравнений:

где is обозначает i-тый взрыв и изменяется от 1 до ns (то есть всего n взрывов).
Волна с аномальной энергией, регистрируемая на обоих датчиках, которая часто является монохроматической, не влияет на вторую оценку из уравнения (8), хотя она оказывает преобладающее влияние на результат первой оценки из уравнения (6). Другими словами, стационарность спектра мощности не является необходимым условием для  Однако для второй оценки характерно наличие провалов в оцененных спектрах мощности.
Однако для второй оценки характерно наличие провалов в оцененных спектрах мощности.
Оценочная функция  может быть использована для проверки предположения относительно того, что входные сигналы на соседних датчиках имеют одинаковые спектры мощности и что различия между сигналами, зарегистрированными на различных датчиках, обусловлены инвариантными ко времени явлениями, такими как различия в согласовании между датчиками. Остатки решения уравнения (8) методом наименьших квадратов являются в сущности индикатором справедливости этого предположения. Итеративно повторно взвешенное решение методом наименьших квадратов с диагонально взвешивающей матрицей, элементы которой пропорциональны остаткам, может быть использовано для снижения влияния несостоятельных измерений.
может быть использована для проверки предположения относительно того, что входные сигналы на соседних датчиках имеют одинаковые спектры мощности и что различия между сигналами, зарегистрированными на различных датчиках, обусловлены инвариантными ко времени явлениями, такими как различия в согласовании между датчиками. Остатки решения уравнения (8) методом наименьших квадратов являются в сущности индикатором справедливости этого предположения. Итеративно повторно взвешенное решение методом наименьших квадратов с диагонально взвешивающей матрицей, элементы которой пропорциональны остаткам, может быть использовано для снижения влияния несостоятельных измерений.
Уравнения (2) и (5) могут быть использованы для получения fc2 и ηc2 в предположении, что приемник 1 идеально согласован с сейсмическим волновым полем, с помощью следующей нелинейной процедуры минимизации, в которой зависимость от дискретизированной частоты (fj) теперь представлена в явном виде:

Поэтому определив, как описано выше, что один приемник представляет собой «идеально согласованный» приемник, можно получить информацию о согласовании второго приемника. «Идеально согласованный» приемник используют в качестве эталонного приемника. Эта процедура также может быть применена к системе сейсмической разведки, которая содержит более чем два приемника, и снова, определив, что один приемник является идеально согласованным с сейсмическим волновым полем, можно получить информацию о согласовании других приемников в системе сейсмической разведки.
При определении идеально согласованного или наилучшим образом согласованного приемника в группе соседних приемников учитывают два хорошо известных свойства механизма связи: подчеркивание частот вблизи резонансной частоты связи и введение фазовой задержки. Если первоначально предполагают, что приемник 2 является эталонным приемником, а при вычислении  обнаруживают провал, а не максимум в области ожидаемой резонансной частоты связи, то это указывает на то, что приемник 2 лучше согласован, чем приемник 1, и поэтому приемник 2 становится эталонным приемником. В случае, когда оба приемника согласованы должным образом, функция
обнаруживают провал, а не максимум в области ожидаемой резонансной частоты связи, то это указывает на то, что приемник 2 лучше согласован, чем приемник 1, и поэтому приемник 2 становится эталонным приемником. В случае, когда оба приемника согласованы должным образом, функция  как будет показано ниже, является приблизительно плоской, и в результате применения алгоритма минимизации обнаруживаются высокая резонансная частота связи (то есть резонансная частота связи находится за пределами сейсмического диапазона частот) и небольшой коэффициент демпфирования, который является математическим выражением условия идеального согласования.
как будет показано ниже, является приблизительно плоской, и в результате применения алгоритма минимизации обнаруживаются высокая резонансная частота связи (то есть резонансная частота связи находится за пределами сейсмического диапазона частот) и небольшой коэффициент демпфирования, который является математическим выражением условия идеального согласования.
Поэтому, определив наилучшим образом согласованный приемник в группе близкорасположенных приемников, можно получить информацию о согласовании всех других приемников в группе. Максимальное расстояние между приемниками, на протяжении которого способ может быть применен, может быть найдено из переопределенной системы линейных уравнений (8) путем наблюдения момента, когда продолжение анализируемой области, то есть добавление уравнений к системе, приведет к остаткам, превышающим заранее заданное значение.
В альтернативном варианте осуществления при наличии или возможности оценки эталонного спектра мощности сигнала, зарегистрированного в области, его можно использовать для получения информации о согласовании всех приемников в системе сейсмической разведки вместо того, чтобы предполагать, что один приемник является идеально согласованным. Информацию о согласовании приемника можно найти путем сравнения спектра мощности трасс, зарегистрированных на приемнике, с эталонным спектром мощности, и этот процесс можно осуществлять для любого требуемого приемника.
На фигуре 2(а) приведена рабочая диаграмма одного способа согласно настоящему изобретению. Для упрощения на фигуре 2(а) способ представлен для случая, когда имеются только два приемника.
Сначала на этапе 1 множество трасс сейсмических данных регистрируют на приемнике 1 и одновременно множество трасс сейсмических данных регистрируют на приемнике 2. Приемник 1 пространственно отнесен от приемника 2, и оба приемника однотипны и, следовательно, номинально они имеют идентичные характеристики приема. Приемниками могут быть геофоны. В качестве альтернативы изобретение может быть применено к уже существующим трассам сейсмических данных, и в этом случае этап 1 заменяют этапом 2 извлечения уже существующих трасс сейсмических данных из запоминающего устройства. На этапе 1 или на этапе 2 получают подборку трасс для каждого приемника.
На этапе 3 определяют спектр  мощности каждой трассы, зарегистрированной на приемнике 1, и также определяют спектр мощности каждой трассы, зарегистрированной на приемнике 2. Спектры мощности трасс могут быть оценены любым соответствующим способом. Например, достоверная оценка спектров мощности может быть получена при использовании авторегрессионного метода (такого, как метод Бурга, обычно 16-го порядка) или периодограммы.
мощности каждой трассы, зарегистрированной на приемнике 1, и также определяют спектр мощности каждой трассы, зарегистрированной на приемнике 2. Спектры мощности трасс могут быть оценены любым соответствующим способом. Например, достоверная оценка спектров мощности может быть получена при использовании авторегрессионного метода (такого, как метод Бурга, обычно 16-го порядка) или периодограммы.
В предпочтительном объекте изобретения спектры мощности определяют из по меньшей мере шумовой части трасс сейсмических данных, то есть из части трасс сейсмических данных до первого вступления сейсмической волны от источника. На самом деле спектры мощности могут быть определены исключительно по шумовой части трасс сейсмических данных, поскольку большое количество данных, относящихся к шуму окружающей среды, доступно при типичном сейсмическом исследовании до возбуждения любого сейсмического источника.
На этапе 4 определяют эталонный приемник. Это может быть выполнено, например, путем определения  в соответствии с уравнением (8); если функция
в соответствии с уравнением (8); если функция  имеет провал, а не пик в зоне прогнозируемой резонансной частоты связи, то приемник 2 является лучше согласованным, чем приемник 1, и поэтому его выбирают в качестве эталонного приемника. (Для приемника определенного типа прогнозируемая резонансная частота связи зависит в основном от характеристик упругости формации на месте расположения приемника.)
имеет провал, а не пик в зоне прогнозируемой резонансной частоты связи, то приемник 2 является лучше согласованным, чем приемник 1, и поэтому его выбирают в качестве эталонного приемника. (Для приемника определенного типа прогнозируемая резонансная частота связи зависит в основном от характеристик упругости формации на месте расположения приемника.)
На этапе 5 отношение спектров мощности двух приемников оценивают, применяя уравнение (7) ко всем имеющимся трассам.
На этапе 6 получают информацию о согласовании приемника, который не был идентифицирован как эталонный приемник на этапе 4. Поэтому, если на этапе 4 приемник 1 был идентифицирован как эталонный приемник, то на этапе 6 получают информацию о согласовании приемника 2 в предположении, что приемник 1 хорошо согласован с волновым полем. В предпочтительном варианте осуществления изобретения на этапе 6 определяют резонансную частоту связи и/или коэффициент демпфирования связи для приемника, который не был идентифицирован как эталонный приемник на этапе 4, используя уравнение (9) и значение  определенное на этапе 5.
определенное на этапе 5.
На этапе 7 оператор коррекции согласования, такой, как, например, калибровочный фильтр для приемника, не идентифицированного в качестве эталонного приемника, может быть определен на основании параметров связи приемника, определенных на этапе 6. Калибровочный фильтр может рассматриваться как инверсия передаточной функции приемника и как корректирующий неидеальное согласование приемника; в случае применении калибровочного фильтра к данным, зарегистрированным на приемнике, будет компенсироваться неидеальное согласование приемника и будут получаться данные, которые регистрировались бы, если бы приемник был идеально согласованным.
После того как для приемника, не идентифицированного в качестве эталонного приемника, определен параметр коррекции согласования, его можно применить к трассам сейсмических данных, зарегистрированным на этом приемнике, для коррекции неидеального согласования приемника, что показано как этап 8.
Как показано ниже, оператор коррекции согласования для конкретного приемника является состоятельным для всех трасс данных, зарегистрированных на приемнике при отдельном сейсмическом исследовании (в предположении, что приемник не перемещался и не подвергался возмущениям).
После того как данные, зарегистрированные на приемнике, в случае неидеального согласования приемника скорректированы на этапе 8 путем применения оператора коррекции согласования, данные можно представлять на этапы дополнительной обработки (не показаны). Например, данные могут быть объединены с данными от одного или нескольких других приемников. Дополнительно или в качестве альтернативы прокалиброванные данные могут быть обработаны для получения информации о структуре внутренней области геологической среды.
Альтернативный вариант осуществления изобретения может быть использован, когда имеется или может быть оценен спектр мощности для района сейсмической разведки. Он показан на фигуре 2(b). В этом варианте осуществления информацию о согласовании приемника получают путем сравнения эталонного спектра мощности со спектром мощности, оцененным на основании данных, зарегистрированных на приемнике.
В этом варианте осуществления может быть случай, когда для района сейсмической разведки имеется априорный эталонный спектр мощности. Например, для района сейсмический разведки может иметься эталонный спектр мощности шума окружающей среды и, если это так, то этап 3 будет состоять из определения спектров мощности шума окружающей среды по одной или нескольким трассам, зарегистрированным на приемнике. Затем их можно непосредственно сравнить с эталонным спектром мощности шума окружающей среды. В этом варианте осуществления этап 4 заключается в извлечении эталонного спектра мощности. Отсутствует необходимость идентификации одного приемника в качестве эталонного приемника.
Этап 5 заключается в определении  по отношению спектров мощности, определенных для приемника на этапе 3, к эталонным спектрам мощности шума окружающей среды. Это может быть выполнено при использовании уравнения (10):
по отношению спектров мощности, определенных для приемника на этапе 3, к эталонным спектрам мощности шума окружающей среды. Это может быть выполнено при использовании уравнения (10):

В основном уравнение (10) соответствует уравнению (7), но предполагается наличие эталонного спектра мощности 
Этапы 3, 4 и 5 могут повторяться каждого приемника в группе приемников.
Этапы 6, 7 и 8 в этом варианте осуществления изобретения в основном аналогичны этапам 6, 7 и 8, описанным выше.
В альтернативном варианте осуществления изобретения эталонный спектр мощности для района сейсмической разведки заранее неизвестен и его оценивают по трассам, зарегистрированным на приемниках. В этом варианте осуществления изобретения этап 4 из фигуры 2(b) содержит оценивание эталонного спектра мощности. Для примера эталонный спектр мощности может быть определен просто путем усреднения спектров мощности каждой имеющейся трассы для каждого приемника (то есть путем усреднения всех спектров мощности, определенных на этапе 3).
В качестве альтернативы эталонный спектр мощности может быть оценен путем усреднения спектров мощности трасс, которые не имеют максимума в зоне прогнозируемой резонансной частоты связи. Максимум (пик) в спектре мощности вблизи прогнозируемой резонансной частоты связи позволяет сделать вывод о плохом согласовании, вследствие чего для получения более точной оценки эталонного спектра мощности такие трассы должны быть исключены при оценивании эталонного спектра мощности. Поэтому в этом варианте осуществления изобретения этап 4 на фигуре 2(b) содержит определение для каждой трассы того, имеет ли спектр мощности этой трассы максимум вблизи прогнозируемой резонансной частоты связи, отбрасывание трасс с таким максимумом в спектре мощности и усреднение оставшихся трасс для оценивания эталонного спектра мощности.
В способе согласно фигуре 2(b) идеальную резонансную частоту связи и коэффициент демпфирования связи задают такими, чтобы передаточная функция при условии идеального согласования была максимально плоской в сейсмическом диапазоне частот. Для выполнения этого условия резонансную частоту связи выбирают намного выше сейсмического диапазона частот. В случае высоких значений резонансной частоты связи значение коэффициента демпфирования не влияет на передаточную функцию.
Способы согласно фигурам 2(а) и 2(b) были описаны применительно к однокомпонентному приемнику. Однако изобретение может быть применяться в случае использования многокомпонентного приемника. По существу, способ согласно фигуре 2(а) или 2(b) должен применяться отдельно к каждой компоненте волнового поля, дискретизированного с помощью многокомпонентного приемника. Например, в случае трехкомпонентного геофона способ изобретения должен быть применен отдельно к х-, у- и z-компоненте данных, зарегистрированных с помощью геофона.
Для упрощения описания способы согласно фигурам 2(а) и (b) рассмотрены применительно к группе из двух приемников. Однако изобретение не ограничено группой из двух приемников и может быть применено к группе из более чем двух приемников. Например, при применении способа согласно фигуре 2(а) к группе из более чем двух приемников этап 2 необходимо осуществлять для каждого приемника. Затем должен быть определен эталонный приемник. После этого необходимо выполнить этапы 5, 6 и 7 для каждого приемника, для определения оператора калибровки для каждого приемника. Наконец, на этапе 8 каждый калибровочный фильтр применяют к данным, зарегистрированным на соответствующем приемнике.
На фигуре 3(а) показаны оцененные спектры мощности шумов окружающей среды, записанных в одном местоположении приемника, а на фигуре 3(b) показаны оцененные спектры мощности шумов окружающей среды, записанных во втором местоположении приемника, находящемся на расстоянии 17 м от первого местоположения приемника. В качестве каждого приемника использовали геофон. Спектры параметризировали числом трасс, использованных для получения каждого спектра. Трассы, которые можно рассматривать как выборочные функции случайного процесса, соответствуют шумам окружающей среды, извлеченным из нескольких сейсмограмм общего пункта взрыва при использовании частей трасс данных, зарегистрированных до первого вступления сейсмической волны от сейсмического источника. Данные регистрировали при расстоянии (удалении) между источником и приемником в пределах от 800 до 1000 м. Время наблюдения, то есть время, прошедшее от начала записи трассы и первого вступления сейсмической волны от источника, было приблизительно 250 мс.
Должно быть видно, что за исключением частот вблизи 50 Гц спектры мощности для каждого приемника в значительной мере не зависят от числа трасс, то есть они являются согласованными с приемником. Геофоны, спектры мощности которых показаны на фигурах 3(а) и 3(b), с этого момента по причинам, которые станут вскоре понятными, будут соответственно называться как «хорошо согласованный» и «плохо согласованный» геофон. Эти два геофона находятся соответственно на участках С и В фигуры 5.
Провал на частоте 50 Гц в спектрах мощности обоих геофонов указывает на попытку ослабления монохроматического источника излучения, который исчезает, когда действительная частота дрейфует от номинальной частоты (см. максимум несколько ниже 60 Гц). Спектральной функцией, использованной для получения фигур 3(а) и 3(b), была авторегрессионная оценка Бурга 16-го порядка, которая является устойчивой, но имеет низкое разрешение и неспособна разрешать частоты, отстоящие всего на несколько герц. Функция имеет сглаженный возможный провал на частоте 50 Гц и максимум, находящийся на несколько герц выше частоты 50 Гц, в связи с чем образуется единственный сглаженный максимум. Интервал между регистрацией первой использованной трассы и регистрацией последней использованной трассы составлял 1 ч.
Наиболее важный результат измерений заключается в том, что в спектрах мощности согласно фигуре 3(b) в частотном диапазоне 60-75 Гц наблюдается значительно более высокое содержание частот, которое имеется вне зависимости от числа анализируемых трасс. Это может наводить на мысль о плохом согласовании геофона, использованного для регистрации данных согласно фигуре 3(b).
Возможно, что дополнительная энергия в частотном диапазоне 60-75 Гц в спектре мощности согласно фигуре 3(b) вызвана просто шумами окружающей среды в частотном диапазоне 60-75 Гц, имевшимися в месте расположения геофона, использованного для регистрации данных согласно фигуре 3(b). Для проверки этой возможности определяли спектры мощности шума от поверхностной волны. На фигуре 4(а) показан оцененный спектр мощности для шума от поверхностной волны, записанный на первом приемнике (то есть на приемнике согласно фигуре 3(а)), а на фигуре 4(b) показан оцененный спектр мощности для шума от поверхностной волны, записанный на втором приемнике (то есть на приемнике согласно фигуре 3(b)). Можно видеть, что в спектре мощности, показанном на фигуре 4(b), в частотном диапазоне 60-75 Гц наблюдается превышение энергии на 10-15 дБ по сравнению со спектром мощности согласно фигуре 4(а). Это указывает на то, что дополнительная энергия в диапазоне 60-75 Гц в спектре мощности из фигуры 3(b) обусловлена не дополнительными шумами окружающей среды в местоположении второго приемника, а обусловлена эффектами согласования приемника, поскольку уровень спектра мощности шума от поверхностной волны примерно на 40 дБ выше, чем уровень спектра мощности шумов окружающей среды, и повышенная энергия как в спектре мощности шума на фигуре 3(b), так и в спектре мощности поверхностной волны из фигуры 4(b) может быть следствием только различия передаточных функций двух приемников.
Источник квазимонохроматического шума вблизи 50 Гц и его флуктуации, обнаруживаемые при спектральном анализе шумов окружающей среды, подавлены действием поверхностной волны и поэтому не различаются в спектрах мощности, показанных на фигурах 4(а) и 4(b).
На фигуре 5 показаны результаты применения способа согласно фигуре 2 к группе близкорасположенных приемников. Местоположение каждого приемника обозначено темным прямоугольником. Амплитудный максимум оцененной для приемника передаточной функции связи указан рядом с темным прямоугольником, обозначающим этот приемник. На фигуре показан амплитудный максимум GCk в сейсмическом диапазоне частот, то есть амплитудный максимум наилучшим образом подобранной передаточной функции связи для каждого приемника. Функции связи для приемников в очерченных областях А и С имеют близкие к единице амплитуды максимумов, указывающие на состоятельное согласование, тогда как для приемников в области В имеются амплитуды максимумов вплоть до значения, равного 15, указывающие на плохое согласование. При получении параметров согласования использовали 40 трасс с каждого приемника. Видно, что почти все приемники в областях А и С хорошо согласованы, тогда как приемники в области В согласованы плохо. Вышедший из строя приемник очерчен окружностью в области А. Эталонный приемник находился в области А.
На фигурах с 6(а) по 6(с) приведены некоторые дополнительные подробности использования настоящего изобретения для получения результатов, показанных на фигуре 5. Кривые, показанные пунктирными линиями, отражают логарифм отношения оцененного спектра мощности приемника к оцененному спектру мощности эталонного приемника, определенного в соответствии с уравнением (7). Кривые, показанные сплошными линиями, отражают отношение наилучшим образом подобранной двухпараметрической функции связи, оцененной для приемника, к двухпараметрической функции связи для эталонного приемника, определенного в соответствии с уравнением (2). На фигурах 6(а), 6(b) и 6(с) показаны отношение спектров мощности и отношение функций связи для приемника соответственно в области А, области В и области С согласно фигуре 5. Для эталонного приемника, который, как отмечалось выше, находился в области А согласно фигуре 5, были найдены параметры связи fс1=500 Гц и ηc1=1,4 (критическое демпфирование).
Из фигур 6(а) и 6(с) видно, что отношения спектров мощности для приемников, выбранных в областях А и С, к спектру мощности эталонного приемника приблизительно равны единице. Отношение наилучшим образом подобранной передаточной функции связи к передаточной функции связи эталонного приемника также близко к единице во всем частотном диапазоне от 0 до 80 Гц, показанном на фигурах 6(а) и 6(с), при этом выбранные приемники в областях А и С имеют резонансные частоты, находящиеся намного выше сейсмического диапазона частот, и имеют высокий коэффициент демпфирования, а это характеризует хорошее согласование. Однако на фигуре 6(b) показано, что у приемника, выбранного в области В, обнаруживается явление демпфированного резонанса с резонансной частотой несколько выше 70 Гц, которая находится в пределах обычного диапазона частот, используемого при регистрации сейсмических данных. Отношение спектра мощности приемника, выбранного в области В, к спектру мощности эталонного приемника достигает максимального значения, приблизительного равного 11, на частоте чуть выше 70 Гц. У отношения наилучшим образом подобранной передаточной функции связи приемника, выбранного в диапазоне В, к передаточной функции связи эталонного приемника также обнаруживается максимум чуть выше 70 Гц. Резонанс в пределах сейсмического диапазона частот характеризует плохое согласование приемника, выбранного в области В.
На фигуре 7(а) и фигуре 7(b) показаны соответственно ранние вступления двух сейсмограмм общего местоположения приемника для двух близкорасположенных приемников, разнесенных на расстояние приблизительно 17 м. То есть все трассы, показанные на фигуре 7(а), были зарегистрированы на одном приемнике (одна трасса для каждого взрыва), а все трассы, показанные на фигуре 7(b), были зарегистрированы на втором приемнике (и снова одна трасса для каждого взрыва). По вертикальной оси отложено время после возбуждения сейсмического источника, а в пределах трассы по горизонтальной оси представлена амплитуда вертикальной компоненты сейсмического волнового поля, зарегистрированного на приемнике. Трассы скомпонованы в порядке возрастания удаления. Трассы, показанные на фигуре 7(а), были зарегистрированы на приемнике в области С из фигуры 5, а трассы на фигуре 7(b) были зарегистрированы на приемнике в области В из фигуры 5.
Формы сигналов на сейсмограммах из фигуры 7(а) и 7(b) медленно изменяются от трассы к трассе, что является признаком хорошей повторяемости сигнатуры источника. Однако можно заметить существенные различия между сейсмограммами, а именно трассы на фигуре 7(b) в основном более сильно зашумлены по сравнению с трассами на фигуре 7(а), и это особенно ясно видно на частях трасс до первого вступления сейсмической волны от источника.
Трассы на фигуре 7(с) получены из трасс, показанных на фигуре 7(b), путем оценивания передаточной функции связи для приемника в соответствии со способом согласно фигуре 2, получения калибровочного фильтра, который корректирует оцененную передаточную функцию связи, и применения калибровочного фильтра к трассам из фигуры 7(b). Должно быть видно, что высокие частоты, выделявшиеся на фигуре 7(b) при плохом согласовании, на фигуре 7(с) в значительной мере удалены путем применения калибровочного фильтра, а фазы самых первых вступлений теперь сравнимы с фазами на фигуре 7(а). Данные из фигуры 7(с) более пригодны для стадий последующей обработки по сравнению с данными из фигуры 7(b), а в частности более пригодны для образования цифровой группы из данных одного датчика, которая дополнительно содержит комбинацию сигналов, зарегистрированных на соседних датчиках.
Однако следует отметить, что на фигуре 7(с) не показаны знаки изменений фаз спустя приблизительно 20-30 мс после первого минимума. Они возникают вследствие рассеяния в ближнем поле, которое оказывает влияние на фазу и которое может изменяться в пределах расстояния 17 м между приемниками.
Данные полевых работ, на основании которых получали фигуры 5, 6 и 7, регистрировали при использовании наземных вибраторов в качестве сейсмических источников и подвергали корреляции в полевых условиях с номинальными свип-сигналами. Однако в способе согласно настоящему изобретению также могут быть использованы записи шумов окружающей среды и часть некоррелированных данных до первых вступлений. Кроме того, могут быть использованы другие части зарегистрированных сейсмических волн, таких как отраженные волны и поверхностные волны.
В предпочтительных вариантах осуществления изобретения, описанных выше, способ изобретения был применен к данным одного датчика, то есть к данным, при получении которых доступен индивидуальный выход каждого приемника.
На фигуре 8 представлена схематичная структурная схема программируемого устройства 8 согласно настоящему изобретению. Устройство содержит программируемый процессор 9 данных с запоминающим устройством 10 для хранения программ, например, в виде постоянного запоминающего устройства (ПЗУ), в котором хранится программа для управления процессором 9 данных, предназначенная для осуществления всех способов обработки, описанных выше. Устройство также содержит энергонезависимое запоминающее устройство 11 с оперативной записью и считыванием, предназначенное для хранения, например, всех данных, которые должны быть сохранены при отсутствии питания. «Рабочее» или сверхоперативное запоминающее устройство для процессора данных снабжено памятью 12 с произвольной выборкой. Предусмотрен входной интерфейс 13, например, для приема команд и данных.
Предусмотрен выходной интерфейс 14, например, для отображения информации, относящейся к ходу и к получению результата согласно способу. Сейсмические данные могут подаваться для обработки через входной интерфейс 13 или в качестве альтернативы могут быть извлечены из машинно-считываемого устройства 15 для хранения данных.
Программа для работы устройства и для осуществления способа, описанного выше, хранится в запоминающем устройстве 10 для хранения программ, которое может быть выполнено в виде полупроводникового запоминающего устройства, например в виде хорошо известного из уровня техники постоянного запоминающего устройства. Однако программа может храниться на любом другом подходящем носителе данных, например на магнитном носителе 10а данных, таком как «дискета» или компакт-диск 10b, доступный только для чтения.
Предложенное изобретение относится к способам получения информации о согласовании между приемником и формацией, в частности о согласовании между геофоном и формацией. Способ получения информации о согласовании сейсмического приемника включает в себя: определение спектра мощности для записи, зарегистрированной на сейсмическом приемнике, и получение информации о согласовании приемника на основании спектра мощности. Устройство для получения информации о согласовании сейсмического приемника содержит: средство для определения спектра мощности для записи, зарегистрированной на сейсмическом приемнике; и средство для получения информации о согласовании приемника на основании спектра мощности. 2 н. и 15 з.п. ф-лы, 8 ил.
| US 5724306 А, 03.03.1998 | |||
| US 5724307 А, 03.03.1998 | |||
| Пневматическое устройство для измерения радиального зазора | 1975 |
|
SU534648A1 |
| СПОСОБ ЛЕЧЕНИЯ ВУЛЬГАРНЫХ И ПОДОШВЕННЫХ БОРОДАВОК | 2022 |
|
RU2810444C1 |
| US 5661697 A, 26.08.1997 | |||
| US 4954998 A, 04.09.1990 | |||
| СПОСОБ ПОЛУЧЕНИЯ ВЕРТИКАЛЬНЫХ СЕЙСМИЧЕСКИХ ПРОФИЛЕЙ В ХОДЕ БУРЕНИЯ СКВАЖИН | 1994 |
|
RU2144684C1 |

