УРОВЕНЬ ТЕХНИКИ
[0001] Настоящее изобретение относится к области сейсмической разведки для обнаружения месторождений нефти и газа и, в частности, но не ограничиваясь этим, относится к морской сейсмической разведке с помощью морских вибраторов с уменьшенной степенью размытия или с увеличенным максимально допустимым искажением сигнала.
[0002] Сейсмическая разведка включает разведку подземных геологических формаций для обнаружения залежей углеводородов. Разведка может включать размещение сейсмического источника (источников) и сейсмических датчиков в заданных местах. Эти источники генерируют сейсмические волны, которые распространяются в геологические формации, создавая по пути изменения давления и вибрации. Изменения упругих свойств геологической формации рассеивают эти сейсмические волны, изменяя направление их распространения и другие свойства. Часть энергии, излучаемой источниками, достигает сейсмических датчиков. Некоторые сейсмические датчики чувствительны к изменениям давления (гидрофоны), а другие чувствительны к движению частиц (геофоны); при этом для разведки в промышленных масштабах можно применять датчики одного типа или датчики обоих типов. Реагируя на обнаруженные сейсмические события, эти датчики генерируют электрические сигналы для создания сейсмической информации. Последующий анализ этой сейсмической информации может показать наличие или отсутствие возможных мест расположения залежей углеводородов.
[0003] Некоторые виды разведки известны как "морская" разведка, поскольку их осуществляют в морской среде. Однако, "морскую" разведку можно осуществлять не только в средах с соленой водой, но и в пресной или в подсоленной воде. В одном типе морской разведки, называемом "разведкой на буксируемой сейсмической установке", исследовательское судно буксирует систему из сейсмических кос, содержащих сейсмические датчики, и источников. В одном типе морской разведки, называемом "определение морского вертикального сейсмического профиля (морского ВСП)", комплект датчиков размещается в скважине, а сейсмический источник либо перемещается (например, буксируется судном), либо располагается неподвижно (например, подвешен к такой конструкции как буровой агрегат). В одном типе морской разведки, где применяются как гидрофоны, так и геофоны, называемом "донная коса (ДК)", датчики укладывают на дно моря. В морской разведке другого типа датчики размещаются другими способами, а сейсмический источник устанавливают в воде определенным способом, где датчики или источники могут быть подвижными или неподвижными. Другие типы разведки называются "наземными" типами разведки, поскольку они осуществляются в наземной среде. При наземной разведке в качестве источников могут применяться динамит или сейсмические вибраторы. На земле укладывают систему кабелей, содержащих сейсмические датчики, для приема сейсмических сигналов. Эти сейсмические сигналы можно преобразовывать, приводить в цифровой вид, записывать или передавать от датчиков к носителям информации и/или средствам обработки, расположенным поблизости, например, к передвижной геофизической лаборатории. При наземной разведке можно также применять беспроводные приемники, позволяющие избежать ограничений, характерных для применения кабелей. Сейсмическую разведку можно также осуществлять в зонах между сушей и морем, называемых "переходными зонами".
[0004] Теоретически при проведении морской сейсмической разведки источниками могут быть импульсные источники (например, пневмопушки) или источники непрерывного действия (например, морские сейсмические вибраторы). Однако, на практике морские сейсмические вибраторы обычно не применяют. Существует потребность сделать морские сейсмические вибраторы еще одним применимым на практике типом источника для морской сейсмической разведки.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
[0005] Данное описание сущности изобретения предназначено для представления выбора концепций, описанных более детально ниже в подробном описании изобретения. Это описание сущности изобретения не имеет целью определить ключевые или наиболее важные особенности предмета обсуждения и не служит для ограничения объема заявленного предмета обсуждения.
[0006] Данное раскрытие описывает способы и аппаратуру для морской сейсмической разведки, где в качестве источника применяется морской сейсмический вибратор. Эти способы включают применение функций свипирования, которые уменьшают необходимость очистки от размытия данных вибраторными источниками или повышают максимально допустимое искажение, являющееся результатом размытия, гармоник и т. п. Эти способы также могут включать использование функций свипирования для вибратора, которые могут обеспечить надлежащую низкочастотную энергию для получения сейсмических изображений. Аппаратура включает морские сейсмические вибраторы, которые могут использоваться в морской сейсмической разведке, при этом данные легко очищаются от размытий или совсем не требуют очистки.
[0007] В вариантах воплощения настоящего изобретения морские сейсмические вибраторы используются для генерирования сейсмических данных, которые либо уже генерируются очищенными, либо легко могут быть очищены, и которые обрабатываются для определения свойств подземных участков Земли.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0008] Варианты воплощения настоящего изобретения описаны со ссылками на поданные ниже фигуры. На всех фигурах для обозначения одинаковых особенностей и компонентов используются одинаковые номера позиций. Способы и аппаратуру по настоящему изобретению можно лучше понять, рассматривая поданное ниже подробное описание некоторых вариантов воплощения изобретения в совокупности с прилагающимися чертежами, где:
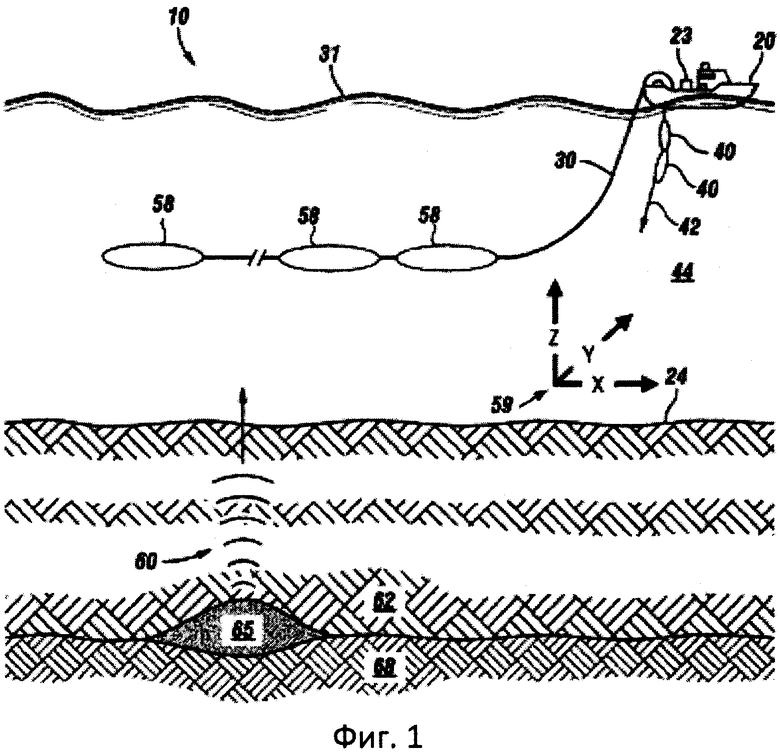
[0009] на фигуре 1 представлена сейсморегистрирующая система в морской среде;
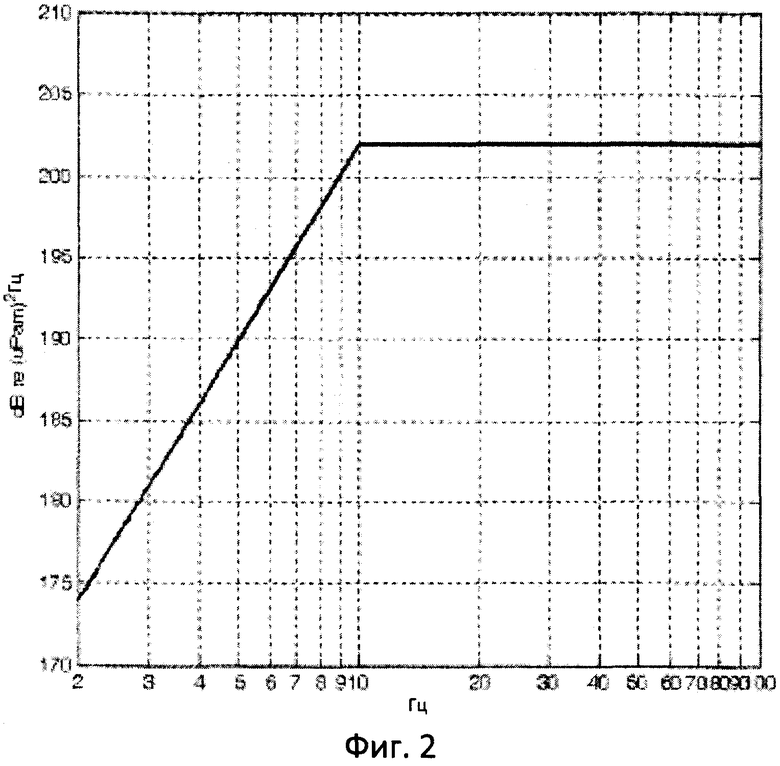
[0010] на фигуре 2 представлена энергия Em(f) одночастотного выходного сигнала морского вибратора;
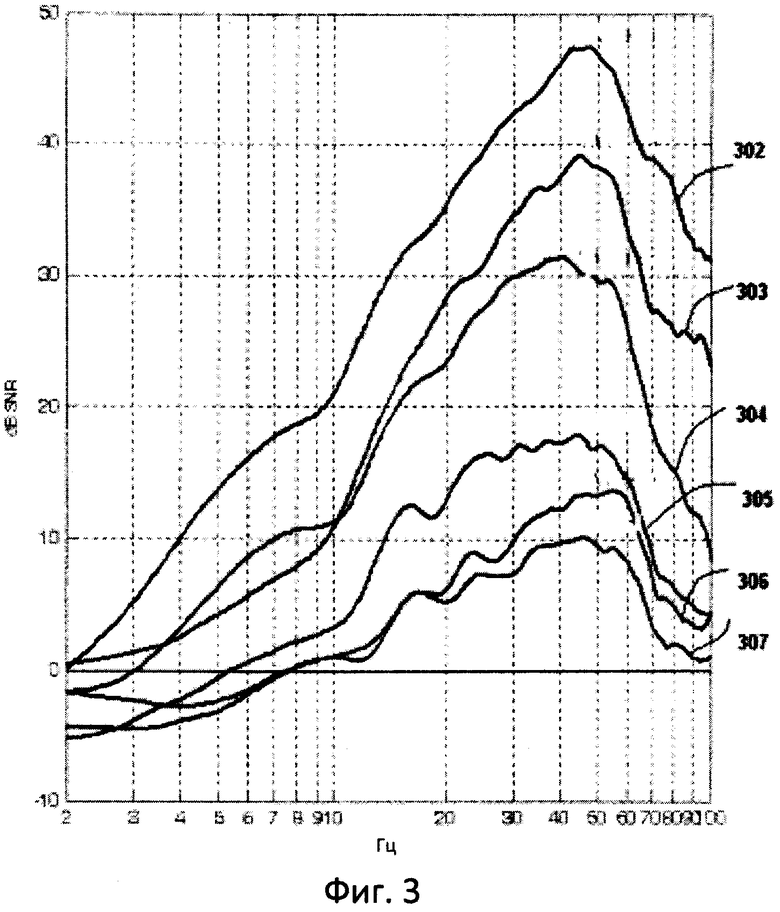
[0011] на фигуре 3 представлен пример отношений сигнала к шуму (ОСШ) на двумерном сейсмическом изображении при использовании различных источников;
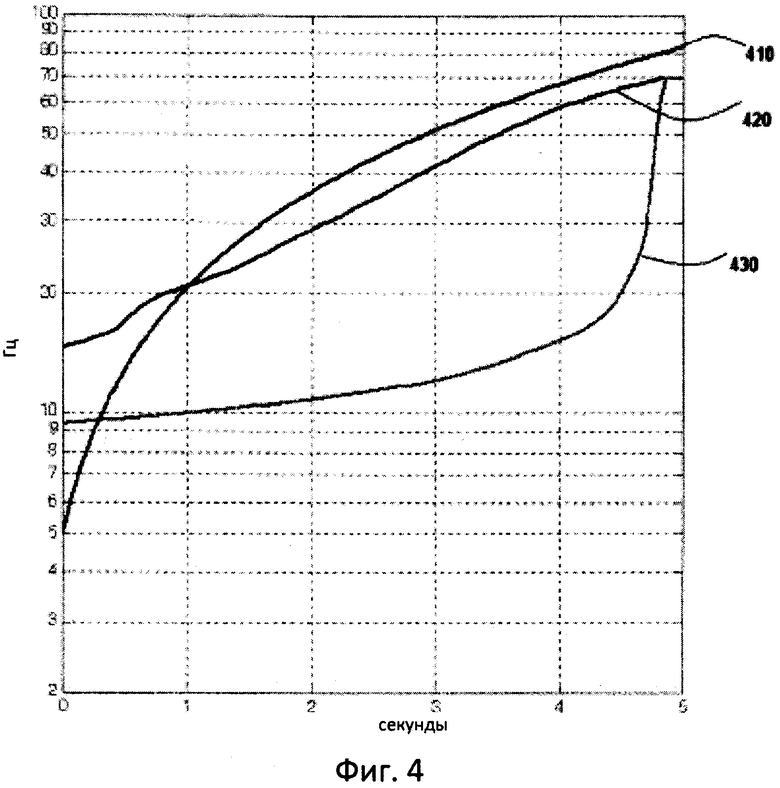
[0012] на фигуре 4 представлены несколько функций свипирования;
[0013] на фигуре 5 представлены несколько функций свипирования и их ОСШ;
[0014] на фигуре 6 представлено схематичное изображение компьютерной системы, которая может применяться для воплощения некоторых из описанных здесь способов;
[0015] на фигуре 7 представлена блок-схема способа в соответствии с одним из вариантов воплощения изобретения;
[0016] на фигуре 8 показаны кривые с постоянной фазовой погрешностью в полосе частот или в диапазоне длин волн;
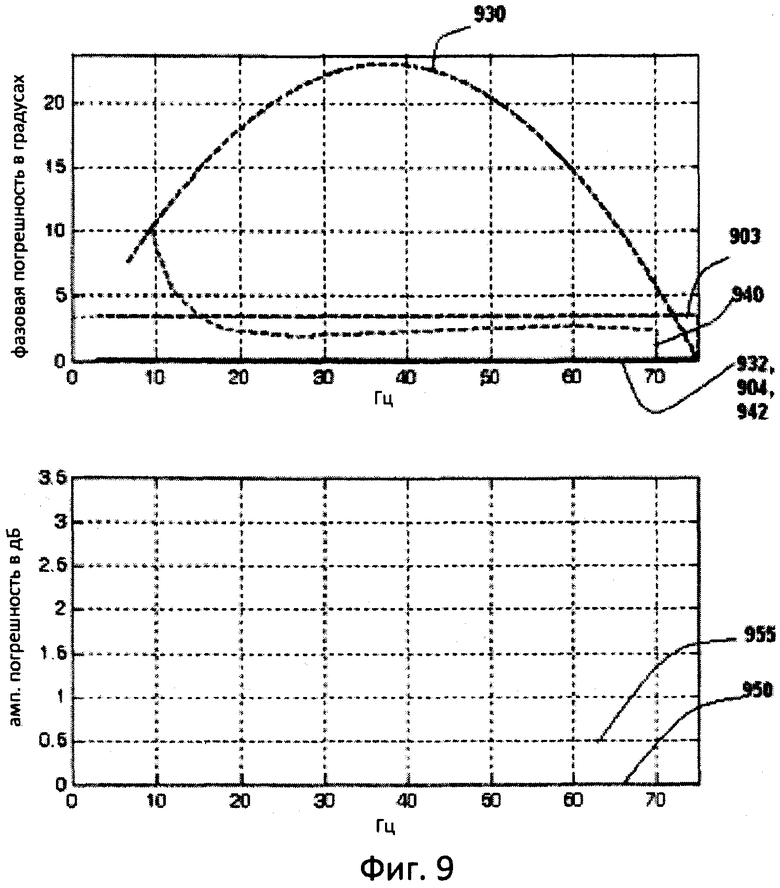
[0017] на фигуре 9 показаны погрешности нескольких функций свипирования;
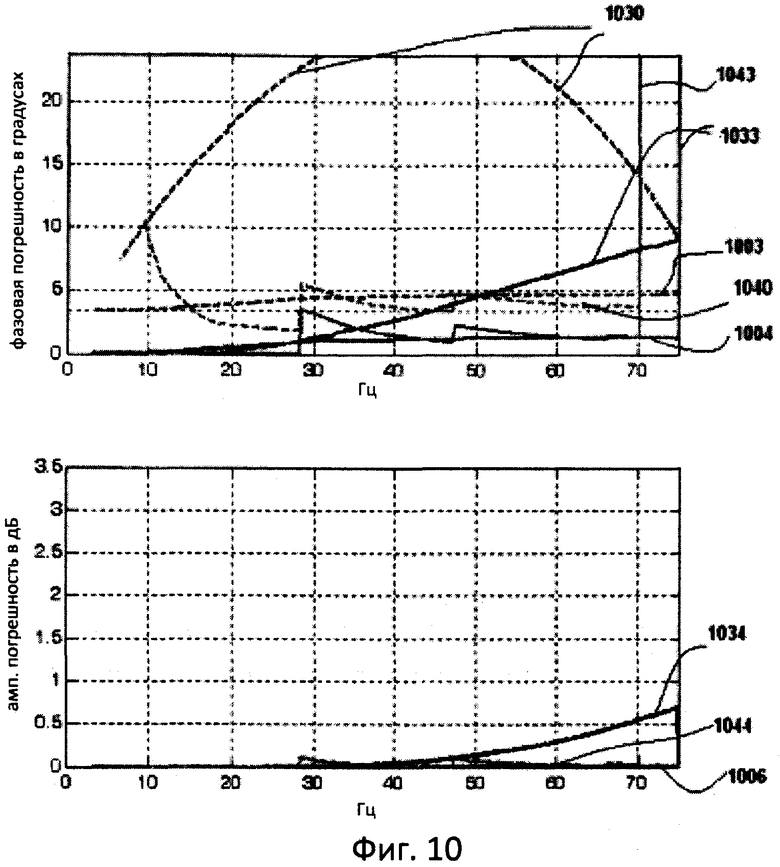
[0018] на фигуре 10 показаны погрешности нескольких функций свипирования с искажениями; и
[0019] на фигуре 11 показана блок-схема способа по одному из вариантов воплощения изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
[0020] Далее будут подробно описаны варианты воплощения изобретения, примеры которых представлены на прилагающихся чертежах и фигурах. В этом подробном описании многочисленные конкретные детали показаны для того, чтобы предоставить полное понимание сущности изобретения. Однако, специалисту обычного уровня квалификации в данной области будет понятно, что данное изобретение может быть воплощено на практике и без этих конкретных деталей. В других случаях общеизвестные способы, процедуры и системы не описаны подробно, чтобы не усложнять рассмотрение некоторых аспектов изобретения.
[0021] Следует также понимать, что хотя для описания различных элементов используются такие термины как "первый", "второй" и т. п., однако, эти термины не являются ограничивающими применительно к этим элементам. Эти термины используются только для того, чтобы отличать один элемент от другого. Например, первый объект или этап можно назвать вторым объектом или этапом, аналогично второй объект или этап можно назвать первым объектом или этапом. Как первый объект или этап, так и второй объект или этап, оба, являются, соответственно, объектами или этапами, но их нельзя рассматривать как один и тот же объект или этап.
[0022] Терминология, применяемая в данном описании изобретения, предназначена только для описания конкретных вариантов воплощения изобретения и не предназначена ограничивать сущность изобретения. Применительно к описанию настоящего изобретения и прилагающейся формуле изобретения, существительные, указанные в единственном числе, подразумевают также и множественное число, если в контексте однозначно не указано иное. Следует также понимать, что применяемый здесь термин "и/или" предусматривает и охватывает любые и все возможные комбинации одного или более соответствующих перечисленных компонентов. Следует также понимать, что применяемые здесь термины "включает", "включающий", "содержит" и/или "содержащий", применительно к данному описанию, означают присутствие указанных особенностей, единиц, этапов, операций, элементов и/или компонентов, но не исключает наличия или прибавления одной или более других особенностей, единиц, этапов, операций, элементов, компонентов и/или их групп.
[0023] Применительно к данному описанию термин "если", в зависимости от контекста, может означать "когда" или "после того как", или "в качестве реакции на определение", или "в качестве реакции на обнаружение". Аналогично фраза "если определено, что" или "если [заданное состояние или событие] обнаружено", в зависимости от контекста, может означать "после определения" или "в качестве реакции на определение", "после обнаружения [заданного состояния или события]" или "в качестве реакции на обнаружение [заданного состояния или события]".
[0024] Кроме того, следует отметить, что варианты воплощения изобретения можно описать как процесс, показанный в виде блок-схемы, функциональной диаграммы, диаграммы информационных потоков, структурной схемы или функциональной схемы. На блок-схеме операции могут быть показаны в виде последовательного процесса, однако, многие операции могут выполняться параллельно или одновременно. Кроме того, может быть изменен порядок выполнения операций. Процесс прекращается с завершением выполнения его операций, однако, могут быть и дополнительные этапы, не включенные в фигуру. Процесс может соответствовать способу, функции, процедуре, подпрограмме и т. п. Если процесс соответствует функции, то его прекращение соответствует возврату функции к вызывающей функции или к основной функции.
[0025] Кроме того, применительно к данному описанию термин "запоминающая среда" может представлять собой одно или более устройств для хранения данных, включая постоянное запоминающее устройство (ПЗУ), запоминающее устройство с произвольной выборкой (ЗУПВ), магнитное ЗУПВ, оперативную память, носители информации на магнитных дисках, оптические запоминающие устройства, устройства флэш-памяти и/или другие машиночитаемые носители информации. Термин "машиночитаемый носитель" включает, не ограничиваясь этим, портативные или стационарные устройства хранения информации, оптические устройства хранения информации, беспроводные каналы и различные другие среды, способные записывать, хранить и содержать инструкцию (инструкции) и/или данные.
[0026] Автор настоящей заявки раскрывает способы и аппаратуру, чтобы сделать практичным применение морского сейсмического вибратора, раскрытое в находящейся одновременно на рассмотрении заявке этого же изобретателя, озаглавленной «СПОСОБЫ И СИСТЕМЫ СВИПИРОВАНИЯ ДЛЯ МОРСКИХ ВИБРАТОРОВ», регистрационный номер IS 11.0203. Заявка IS 11.0203 включена сюда в полном объеме путем ссылки для всех целей.
[0027] На Фигуре 1 показана сейсморегистрирующая система 10 морского базирования. В системе 10 исследовательское судно 20 буксирует одну или более сейсмических кос 30 (на Фигуре 1 показана одна сейсмическая коса 30), располагающихся за судном 20. Следует отметить, что сейсмические косы 30 можно располагать таким образом, чтобы множество сейсмических кос 30 во время буксировки располагались в одной плоскости на одной глубине. В качестве другого неограничивающего примера, предусматривается буксировка сейсмических кос на множестве разных глубин, например, выше/ниже основной линии.
[0028] Длина сейсмических кос 30 может составлять несколько тысяч метров, они могут содержать различные опорные тросы (не показано), а также соединительные провода и/или цепи (не показано), с помощью которых может поддерживаться связь вдоль сейсмических кос 30. Обычно каждая сейсмическая коса 30 содержит основной трос, в который вмонтированы сейсмические датчики 58, которые записывают сейсмические сигналы. Сейсмические косы 30 содержат сейсмические датчики 58, которые могут быть гидрофонами, принимающими информацию о давлении, геофонами, принимающими информацию о движении, или многокомпонентными датчиками. Например, датчики 58 могут быть многокомпонентными датчиками, при этом каждый такой датчик способен детектировать волновое поле давления и по меньшей мере одну компоненту движения частицы, связанную с акустическими сигналами вблизи датчика. Примеры компонент движения частиц включают одну или более компонент смещения частицы, одну или более компонент (продольную (x), поперечную (y) и вертикальную (z) компоненты (см., например, оси 59)) скорости частицы, а также одну или более компонент ускорения частицы.
[0029] Многокомпонентный сейсмический датчик может включать один или более гидрофонов, геофонов, датчиков смещения частиц, датчиков скорости частиц, акселерометров, датчиков перепада давления или их комбинации.
[0030] Морская сейсморегистрирующая система 10 содержит один или более сейсмических источников 40 (на Фигуре 1 показаны два сейсмических источника 40), например, пневмопушек или других источников. Эти сейсмические источники 40 могут быть связаны с исследовательским судном 20 или буксироваться этим судном. Сейсмические источники 40 могут работать независимо от исследовательского судна 20, то есть эти источники 40 можно прикреплять, в качестве нескольких примеров, к другим суднам или буям.
[0031] По мере того как исследовательское судно 20 буксирует сейсмические косы 30 за собой, сейсмические источники 40 генерируют акустические сигналы 42 (акустический сигнал 42, показанный на Фигуре 1), которые часто называют "выстрелами", и направляют их вниз через водяной столб 44 в слои 62 и 68 под нижней поверхностью воды 24. Затем эти акустические сигналы 42 отражаются от различных подземных геологических формаций, например, от показанной на Фигуре 1 формации 65.
[0032] Падающие акустические сигналы 42, генерируемые источниками 40, приводят к образованию соответствующих отраженных акустических сигналов или волн давления 60, которые детектируются сейсмическими датчиками 58. Следует отметить, что волны давления, принимаемые и детектируемые сейсмическими датчиками 58, включают в себя "поднимающиеся" волны давления, движущиеся к датчикам 58, не отражаясь от границы раздела воздух-вода 31, а также "опускающиеся" волны давления, образованные отражениями волн давления 60 от границы раздела воздух-вода 31.
[0033] Сейсмические датчики 58 генерируют сигналы (например, цифровые сигналы), именуемые "следами", соответствующие измеренным значениям волнового поля давления и движения частиц. Следует отметить, что, хотя физическое волновое поле непрерывно в пространстве и во времени, следы записываются в дискретных точках пространства, что может привести к пространственному искажению. Эти следы записываются и могут по меньшей мере частично обрабатываться устройством обработки сигналов в блоке 23, установленном на исследовательском судне 20, в соответствии с некоторыми вариантами воплощения изобретения. Например, конкретный сейсмический датчик 58 может дать след, соответствующий значению волнового поля давления, полученному его гидрофоном; и датчик 58 может также дать (в зависимости от конфигурации этого датчика) один или более следов, соответствующих одной или нескольким компонентам движения частицы.
[0034] Одна из целей сейсмической разведки состоит в том, чтобы построить изображение разведываемой области для того, чтобы идентифицировать подземные геологические формации, например, геологическую формацию 65. Последующий анализ этого изображения может показать места возможных залежей углеводородов в подземных геологических формациях. В зависимости от конкретной схемы разведки части анализа изображения могут осуществляться на сейсмическом исследовательском судне 20, например, с помощью устройства обработки сигналов в блоке 23. В других схемах разведки обработку изображения может осуществлять система обработки сейсмических данных (например, система 600 обработки сейсмических данных, показанная на Фигуре 6 и описанная ниже), которая может быть расположена, например, в офисе на суше или на судне 20.
[0034] Конкретный сейсмический источник 40 может быть сформирован в виде системы элементов сейсмического источника (например, пневмопушек или морских сейсмических вибраторов), которые могут располагаться вереницами (например, вереницами пушек) в этой системе. Конкретный сейсмический источник 40 также может быть образован из одной пневмопушки или системы из заданного количества пневмопушек, а может быть сформирован из множества таких систем и т. д. Независимо от конкретного состава сейсмических источников эти источники в процессе разведки могут выстреливать в конкретной временной последовательности.
[0036] Теоретически для сейсмической разведки можно применять импульсные источники или источники непрерывного действия. На практике при проведении наземной сейсмической разведки действительно применяют и импульсные источники, и источники непрерывного действия. Однако, при проведении морской сейсмической разведки в промышленных масштабах источники непрерывного действия (например, морские сейсмические вибраторы) почти никогда не используются. Существует много характеристик морских сейсмических вибраторов, которые препятствуют их практическому применению в качестве сейсмических источников. Одной из таких характеристик является их слабая акустическая мощность по сравнению с пневмопушками, в особенности на низких частотах. Результатом слабой мощности на низких частотах может быть ухудшение сейсмических изображений до недопустимого уровня. Эта же характеристика - слабая мощность - означает, что в процессе разведки оказывается незначительное воздействие на окружающую среду, а это является преимуществом с точки зрения охраны окружающей среды, в особенности, для защиты морской фауны, что является одной из проблем при проведении сейсмической разведки. В отличие от импульсных источников (например, пневмопушек), которые могут испускать импульс, охватывающий сразу весь спектр, вибратор может осуществлять вибрацию последовательно на каждой отдельной частоте спектра, в результате чего энергия такого источника охватывает весь спектр. Количество времени, требующееся вибратору для того, чтобы осуществить свипирование по всему спектру, ограничено производственными или эксплуатационными требованиями. Это также может ограничить полное значение энергии по всему спектру частот.
[0037] Другим аспектом, ограничивающим возможность применения морских сейсмических вибраторов для морской сейсмической разведки, является сложность процесса воспроизведения морским сейсмическим вибратором энергетического выходного спектра, соответствующего спектру традиционной системы пневмопушек. До настоящего времени применение морских сейсмических вибраторов не было желательным, практичным и/или осуществимым вследствие необходимости сложной организации, например, в виде системы и способа, раскрытых в патенте Соединенных Штатов 6942059, озаглавленном "Морская вибросейсмическая система с комбинированной полосой пропускания", принадлежащем подателю данной заявки, предназначенной создать такую конфигурацию морского сейсмического вибратора, которая позволила бы обеспечить параметры его выходного сигнала/свипирования, эквивалентные таким параметрам пневмопушки или системы пневмопушек.
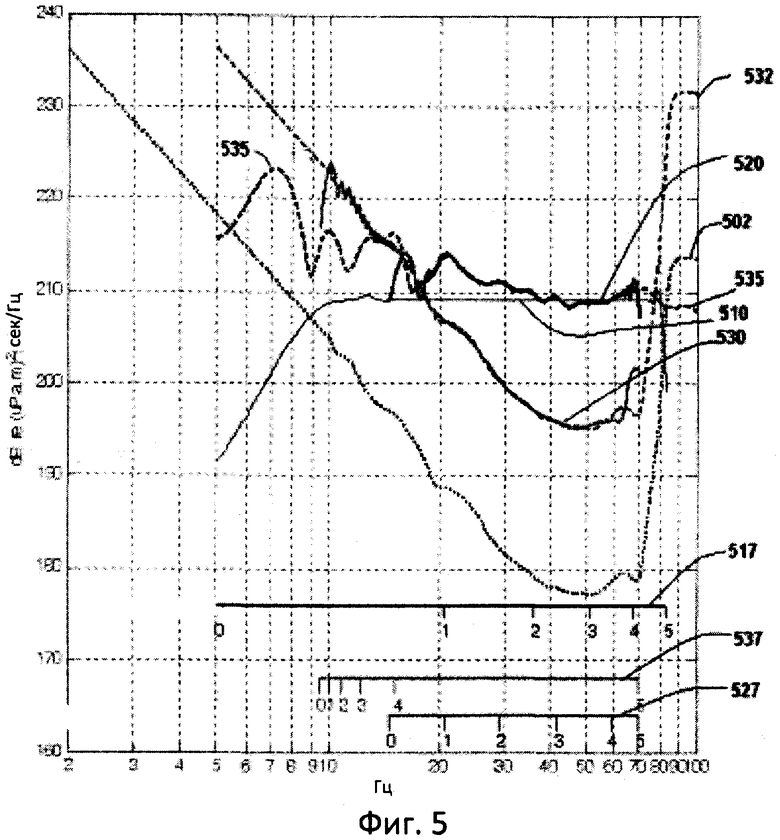
[0038] На Фигуре 2 показан, с целью иллюстрации, пример энергетического спектра Em(f) одночастотного выходного сигнала морского сейсмического вибратора. Выходная мощность является практически постоянной на частотах, превышающих определенную частоту завала. В этом примере такой частотой является приблизительно 10 Гц. На частотах ниже этой частоты завала выходная мощность падает и, в конце концов, становится недостаточной для сейсмической разведки. Этот завал может быть обусловлен ограниченным рабочим диапазоном вибратора и может быть пропорционален квадрату частоты. Для сейсмической разведки все же может понадобиться часть диапазона (например, несколько Гц) ниже этой частоты завала (например, 10 Гц). Горизонтальный участок кривой в области выше частоты завала может быть обусловлен ограничениями в механизме, управляющем работой вибратора. Показанный здесь энергетический спектр выходного сигнала морского сейсмического вибратора сильно отличается от энергетического спектра обычной пушки, один из которых показан на Фигуре 5 кривой 535, и будет рассмотрен позже. С помощью морского сейсмического вибратора трудно получить такой же энергетический спектр, как у пневмопушки.
[0039] На Фигуре 3 показаны некоторые значения ОСШ в сейсмическом изображении, где данные были получены с помощью системы пневматических пушек. Здесь иллюстрируются соотношения между качеством сейсмического изображения и различными параметрами процесса получения сейсмических данных. Эти данные были взяты из традиционного двумерного сейсмического профиля, полученного в Мексиканском заливе с помощью системы пневмопушек. Этот же самый профиль был получен также без выстрелов пневмопушек (пассивный участок, с использованием только шума), в результате чего с помощью того же процесса обработки можно было создать изображение фонового шума. Данные изображения разделили по односекундным окнам в зависимости от целевой глубины в терминах TWT (TWT = двойное время пробега, то есть время прохождения сигнала от источника до приемника). Данные односекундных окон изображения преобразованы в частотный диапазон, а затем поделены на спектры шумов, чтобы получить значения ОСШ, как показано на Фигуре 3. Каждая кривая (302 - 307) демонстрирует значения ОСШ для изображения в односекундном окне, например, кривая 302 - для окна с TWT в 2-3 секунды, кривая 303 - для окна с TWT в 3-4 секунды, кривая 304 - для окна с TWT в 4-5секунд, кривая 305 - для окна с TWT в 5-6 секунд, кривая 306 - для окна с TWT в 6-7 секунд, а кривая 307 - для окна с TWT в 7-8 секунд. Изображением хорошего качества часто может считаться изображение с минимальным значением ОСШ приблизительно в 20 дБ. Значение ОСШ ниже 20 дБ в некоторых частях спектра может ухудшить сейсмическое изображение порой до неприемлемого уровня, значение ОСШ, значительно превышающее 20 дБ в других частях, может не дать никакого преимущества для результирующего сейсмического изображения в целом. Например, для TWT в 4-5 секунд (304) на частоте 40 Гц превышение выходного сигнала над шумом составляет 32 дБ, что на 12 дБ больше, чем требуется для получения качественного изображения с требованием 20 дБ. Для мелких целей (например, с TWT менее 4 секунд) значение ОСШ в 20 дБ обеспечивается в довольно большом диапазоне (в данном примере - от приблизительно 12 Гц и выше). Для целей с TWT в 4-5 секунд (304), например, значение ОСШ в 20 дБ обеспечивается в немного более узком диапазоне - приблизительно между 15 Гц и 70 Гц. Если цели расположены на большей глубине (305, 306 или 307), значение ОСШ будет недостаточным для достижения уровня качества в 20 дБ. Если для мелких целей значения ОСШ сильно превышают требуемое для качественного изображения, то для более глубоких целей (с TWT свыше 6 с) значение ОСШ может оказаться недостаточным.
[0040] Из Фигуры 3, где источником является пневмопушка, можно увидеть, что плотность энергии распределяется неравномерно. На высокочастотном краю спектра пневмопушка дает больше энергии, чем необходимо для получения изображения с достаточным качеством, т. е. с требуемым значением ОСШ. Энергетический спектр пневмопушки не является оптимальным для получения сейсмических изображений. Для получения сейсмического изображения с заданным качеством изображения не требуется сравнивать спектр плотности энергии вибратора со спектром плотности энергии пневматических пушек. Другими словами, в случае применения морских вибраторов их спектры не обязательно должны соответствовать спектрам пневмопушек. Морские сейсмические вибраторы можно использовать для получения определенной спектральной энергетической плотности, исходя из результирующего качества сейсмического изображения, а не из спектральных характеристик пневмопушки. Такое основанное на качестве изображения распределение энергии по спектру или функции свипирования могут быть более полезными и эффективными.
[0041] Согласно настоящему изобретению работа морского сейсмического вибратора (вибраторов) может осуществляться/контролироваться таким образом, чтобы осуществлять сейсмическое свипирование/функцию свипирования с конфигурацией, позволяющей получать требуемое качество и/или базируясь на нем, а не на требовании соответствия выходной энергии типичной системы пневмопушек или создания стандартного равномерного спектра. В соответствии со способами и аппаратурой, описанными ниже, путем создания конфигурации морских сейсмических вибраторов, исходя из требования к качеству изображений или другого требования к качеству, можно сделать морской вибратор способным обеспечивать достаточное количество энергии для сейсмической разведки. В рассмотренных ниже аспектах этих способов функция свипирования для морского сейсмического вибратора может быть разработана, исходя из требования к качеству изображения и/или требований, касающихся воздействия на окружающую среду. Таким путем можно создать конфигурацию морского сейсмического вибратора, позволяющую осуществлять сейсмическое свипирование с более благоприятным воздействием на окружающую среду, чем источник в виде пневмопушки. Кроме того, режимы свипирования в процессе сейсмической разведки можно изменять по мере изменения условий шума и/или воздействия на окружающую среду.
[0042] Для упрощения дальнейшего рассмотрения качество изображения, определяемое значением ОСШ, будет задано условным уровнем, например, 18 дБ. В зависимости от требований или дальнейшего применения результирующего изображения этот уровень ОСШ, определяющий качество изображения, можно установить более высоким (например, 20 дБ, как использовалось ранее) или более низким. Можно определить функции свипирования, которые дадут такое значение ОСШ в пределах как можно более широкого диапазона частот. Значение ОСШ можно по выбору сделать функцией частоты.
[0043] На Фигуре 4 показаны три функции свипирования для морских вибраторов, а на Фигуре 5 показаны их соответствующие энергетические кривые в терминах ОСШ. На Фигуре 4 по горизонтальной оси отсчитывается время (в секундах) в линейном масштабе, а по вертикальной оси - частота (Гц) в логарифмическом масштабе. Синяя кривая 410 иллюстрирует линейное свипирование (то есть означающее, что частота является линейной функцией времени), являющееся традиционной схемой свипирования для вибраторов; красная кривая 420 - это свипирование, соответствующее спектральной характеристике пневмопушки, а оранжевая кривая 430 - это свипирование, основанное на требовании, чтобы значение ОСШ на изображении составляло 18 дБ. Свипирование согласно оранжевой кривой 430 соответствует заданному требованию относительно ОСШ на требуемой/определенной глубине цели и/или минимизирует излучение избыточной акустической энергии. Путем свипирования согласно оранжевой кривой 430 вибраторы могут дать наилучшее качество изображения среди трех кривых свипирования 410, 420 и 430. Кроме того, синергически, свипирование в режиме, представленном оранжевой кривой 430, в меньшей степени воздействует на окружающую среду, чем два других.
[0044] На Фигуре 5 показаны эквивалентные уровни энергии источника в дБ для режимов свипирования, показанных на Фигуре 4, а также уровень энергии фонового шума. Горизонтальная ось - это частота в Гц в логарифмическом масштабе, а вертикальная ось - это уровень энергии источника в дБ. Черной пунктирной кривой 502 показан энергетический спектр фонового шума, эквивалентный измеренному в примерах, показанных на Фигуре 3. Обработка данных от источника шума этого же уровня дает такое же изображение шума, как на Фиг. 3. Для достижения постоянного качества изображения с 18 дБ энергетическая кривая источника может быть оранжевой пунктирной кривой 532, превышающей кривую фонового шума 502 на 18 дБ. Сплошной синей кривой 510 показано линейное свипирование; сплошной красной кривой 520 - свипирование, стремящееся соответствовать энергетическому спектру пневмопушки, который представлен пунктирной красной кривой 535, выходящей за оба края сплошной красной кривой 520. Вследствие того, что время свипирования в этом примере ограничено 5 секундами, морской сейсмический вибратор может не охватить весь спектр 535 пневмопушки. В некоторых операциях для получения информации от более глубоких целей свипирование может длиться 10, 15 секунд или дольше. В этих случаях полоса частот также может быть расширена в сторону низких частот или в сторону высоких частот, или в обе стороны. Сплошная оранжевая кривая 530 представляет собой свипирование, осуществляемое согласно кривой для ОСШ 18 дБ. На Фигуре 5 показана спектральная энергетическая плотность для целей с TWT в 4-5секунд.
[0045] При известном уровне фонового шума, показанном черной пунктирной кривой 502, свипирование, обеспечивающее постоянное значение ОСШ, представляет собой просто оранжевую пунктирную кривую 532, полученную путем прибавления требуемого ОСШ, т. е. 18 дБ, к фоновому шуму. Фоновый шум 502, как показано в этом примере, содержит большой барьер на частоте, превышающей приблизительно 80 Гц, являющийся результатом глубины, на которой находился источник, применявшийся в испытании для получения информации согласно Фигуре 3, а также демонстрирует стабильный подъем при снижении частоты ниже приблизительно 20 Гц. Уровень шума 502 источника - это такой уровень, который в случае его излучения источником и последующей переработки в изображение, аналогичной переработке сигнала, дал бы изображение уровня шума, соответствующее уровню, наблюдаемому на изображении испытания, в результате которого получены кривые на Фигуре 3. Кривая 502 является изображением шума, выраженным как уровень эквивалентного источника.
[0046] При линейном свипировании 510 (синяя линия) энергия распределяется по более широкому диапазону приблизительно от 5 Гц до 83 Гц. Однако, диапазон частот, в котором значение ОСШ сохраняется на уровне 18 дБ, составляет приблизительно 19-80 Гц. На низкочастотном краю значение энергии источника удерживается стабильным приблизительно до 10 Гц, а затем снижается, в то время как энергия шума стабильно увеличивается; значение ОСШ на низких частотах быстро снижается. В случае применения этого типа свипирования для сейсмической разведки рабочий диапазон частот составляет приблизительно 19-80 Гц. Кривая свипирования 517 внизу Фигуры 5 иллюстрирует, что свипирование охватывает весь диапазон частот от 5 Гц до 83 Гц с равными затратами времени на всех участках.
[0047] В режиме свипирования 520, имитирующем спектр пневмопушки (красная линия), энергия источника не падает по мере снижения частоты на низкочастотном краю. Для того, чтобы охватить весь спектр, не выходя за пределы 5-секундной длительности свипирования, диапазон охватываемых частот должен быть меньше, чем при линейном свипировании 510. В этом случае диапазон свипирования составляет приблизительно от 12 Гц до 70 Гц (см. нижнюю красную линию 527). Во время практически всего процесса свипирования ОСШ превышает заданное значение 18 дБ. Диапазон используемых частот в низкочастотной области расширяется до значения 12 Гц в отличие от 19 Гц - при линейном свипировании 517. В случае применения реальной пневмопушки спектр расширился бы до соответствия пунктирной линии 535, заканчивающейся приблизительно на частоте 5 Гц. Спектральный диапазон увеличится, но используемый спектральный диапазон (т. е. участок диапазона с соблюдением требования, чтобы ОСШ превышало 18 дБ) в этом примере останется практически тем же самым.
[0048] В случае свипирования 530, обеспечивающего постоянное значение ОСШ (оранжевая линия 530), полоса покрываемых частот будет самой широкой - приблизительно от 9,5 Гц до 70 Гц. В этом случае львиная доля длительности свипирования будет посвящена прохождению низкочастотного края, где потребность в энергии наибольшая, а мощность вибратора наиболее ограничена. Например, вибратору требуется одна секунда только для того, чтобы пройти полосу самых низких частот приблизительно от 9,5 Гц до 10 Гц, и 4 секунды для прохождения всех частот ниже 16 Гц, в то же время полоса более высоких частот 16-70 Гц проходится за одну секунду. В этом режиме свипирования 530 используемый диапазон частот составляет приблизительно от 9,5 Гц до 70 Гц. Низкочастотный край расширяется до значения ниже 10 Гц в отличие от свипирования в режиме пневмопушки 520, где он составляет 12 Гц, и линейного свипирования 510, где он составляет 19 Гц.
[0049] Свипирование 530 является в высокой степени нелинейным. В этом примере вибратор затрачивает 4,2 секунды (приблизительно 85% от всей 5-секундной длительности свипирования) на прохождение низкочастотной полосы 9,5-18 Гц (8,5 Гц или приблизительно 15% от всей полосы шириной 61,5 Гц); а на прохождение оставшейся полосы более высоких частот 18-70 Гц (52 Гц или приблизительно 85% от всей полосы шириной 61,5 Гц) затрачивает 0,8 секунд (приблизительно 15% длительности свипирования).
[0050] Свипирование 530 сильно отличается от режима работы морского сейсмического вибратора, когда он используется для осуществления традиционного линейного свипирования 510 или свипирования 520, предназначенного соответствовать работе системы пневматических пушек (красная линия). При осуществлении последних двух вариантов свипирования 510 и 520 с помощью морского сейсмического вибратора излучается слишком много энергии на средних и высоких частотах, например, на частотах свыше 17 Гц. На низких частотах, например, ниже приблизительно 17 Гц в процессе свипирования 510 и 520 излучается слишком мало энергии. Эти режимы свипирования не обеспечивают необходимого/требуемого значения ОСШ по диапазону используемых частот.
[0051] В примерах, представленных на Фигурах 4 и 5, длительность свипирования ограничена 5 секундами. Увеличение длительности свипирования позволит увеличить количество доступной энергии и расширить охватываемый диапазон частот.
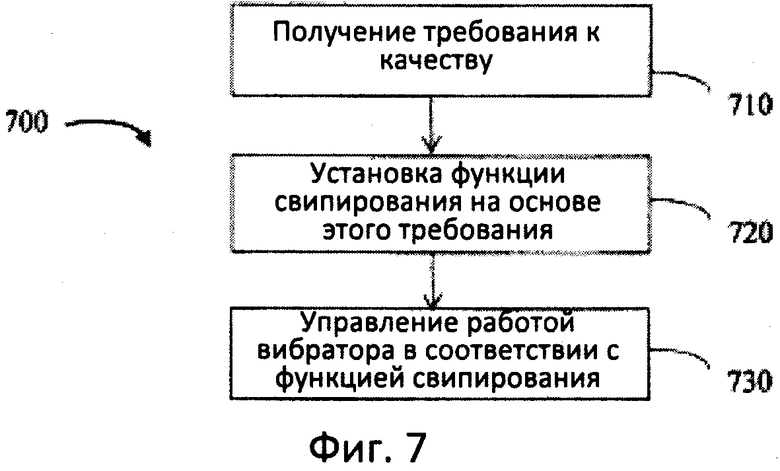
[0052] Способ 700 можно коротко изобразить в виде блок-схемы, показанной на Фигуре 7. Способ 700, в котором применяется морской сейсмический вибратор, может осуществляться следующим образом:
- получение требования к качеству, например, значения ОСШ, превышающего фоновый шум на изображении, по полосе частот, используемых для получения изображения (710);
- установка функции свипирования, исходя из требований к качеству изображения, например, соответствия энергетической кривой, превышающей фоновый шум на 18 дБ (720);
- управление работой вибратора в соответствии с функцией свипирования (730) и сбор данных.
[0053] Требование к качеству может представлять собой требование к качеству окончательного изображения, например, в виде заданного значения ОСШ. Требование к качеству может быть задано в виде набора функций частот, необязательно связанных с ОСШ. Требование к качеству может быть требованием, касающимся воздействия на окружающую среду, например, предельным значением энергии, излучаемой в определенном частотном диапазоне, с целью защиты морских млекопитающих или предельным значением избыточной излучаемой энергии. При использовании значения ОСШ значение фонового шума изображения можно получить путем прямого измерения уровня шума и аппроксимации к способу обработки, как в описанном выше примере, или из опыта предыдущих исследований в аналогичной области проведения разведки, с аналогичными погодными условиями и оборудованием для проведения разведки. Прямое измерение можно осуществлять до проведения разведки, как в описанном выше примере. Прямое измерение шума можно также осуществлять в ходе разведки в режиме реального времени, т. е. дать возможность датчикам записывать сигналы в то время, когда источники не активированы. Функцию свипирования можно определять, исходя из уровня шума, измеренного в режиме реального времени.
[0054] Уровень фонового шума можно также оценить на основе общей информации, касающейся схемы разведки. Требование к качеству может представлять собой компромисс между разными требованиями, например, фактор для расчета свипирования может включать геофизические цели: (1) требуемое для изображения значение ОСШ; (2) нижнее и верхнее предельные значения полосы частот для получения изображения; (3) экологические цели, включая, но не ограничиваясь этим, минимизацию воздействия на окружающую среду, например, путем минимизации излучения избыточной акустической энергии.
[0055] В одном варианте воплощения изобретения разработка режима свипирования для морского сейсмического вибратора/системы морских сейсмических вибраторов может осуществляться до проведения разведки, для чего используются оценочные значения шумового спектра, сейсмического отклика грунта, ОСШ, последовательность обработки и/или требования, касающиеся воздействия на окружающую среду. В других вариантах воплощения изобретения схему свипирования для морского сейсмического вибратора/системы морских сейсмических вибраторов можно вычислить/определить/обработать в процессе проведения разведки, пользуясь записями шумов, ОСШ, характеристиками свипирования и/или подобной измеренной информацией, например, в начале и/или в конце каждого сейсмического свипирования. Таким же способом можно осуществлять ревизию режима свипирования в ходе сейсмической разведки, исходя из конкретных условий шума, наблюдающихся во время разведки. Режим свипирования также можно модифицировать с целью учета варьирующихся местных требований, касающихся воздействия на окружающую среду, например, действительных мест обитания морских млекопитающих в данной области во время проведения сейсмической разведки.
[0056] В ходе операции может быть задействовано более одного сейсмического вибратора, например, множество источников 40, показанных на Фигуре 1. Эти вибраторы можно расположить на разной глубине (например, с эшелонированием по глубине) или вдоль линии желаемого формирования волнового поля, или поперек этой линии.
[0057] Для простоты иллюстрации на Фигуре 1 показана только буксируемая установка для морской сейсмической разведки, являющаяся лишь одной из многих возможных установок для морской сейсмической разведки. В буксируемой установке для морской сейсмической разведки одно или более судов буксируют как датчики, так и источники, перемещающиеся в процессе разведки вместе с буксирующими судами. Как уже упоминалось, возможны многие другие типы установок для морской сейсмической разведки. В некоторых из этих установок датчики в процессе разведки могут быть неподвижными или перемещаться. Источники (например, морской сейсмический вибратор) в процессе разведки также могут оставаться неподвижными или перемещаться.
[0058] Часть описанных выше способов легче понять с помощью математических формул. Схему свипирования для морского сейсмического вибратора можно разработать, исходя из требуемого качества результирующего сейсмического изображения. Энергетический спектр системы морских сейсмических вибраторов в нисходящем направлении, исключая воздействие отражения от поверхности моря, можно приблизительно представить как:

где Em(f) - это энергия, излучаемая одним вибратором, если он постоянно работает на одной частоте f. Em(f) - это характеристика вибратора, которая может варьироваться от вибратора к вибратору. Один из примеров показан на Фигуре 2. N - это число вибраторов.
[0059] Если энергетический спектр S(f) определен, то можно определить и dt/df, а отсюда и f(t), то есть функцию свипирования. Для линейного свипирования df/dt является константой. Если вибратор применяется для имитации работы пневмопушки, то S(f) является энергетическим спектром пневмопушки, показанным кривой 535 на Фигуре 5. Функция свипирования, обеспечивающая генерацию этого энергетического спектра, также показана на фигурах 4 и 5.
[0060] В процессе работы существующее значение длительности свипирования и количество морских сейсмических вибраторов в системе вибраторов ограничивают диапазон частот, в пределах которого свипирование по полосе частот, осуществляемое морскими сейсмическими вибраторами, может удовлетворить заданным требованиям к энергетическому спектру, например, f(tmax)=fmax, тогда f(0)=fmin. Например, для осуществления желаемого свипирования, такого, какое осуществляет система пневмопушек, работу морского сейсмического вибратора можно проводить в таком режиме, чтобы получить спектр, соответствующий на определенной верхней частоте желаемому свипированию. Затем свипирование можно направить от этой верхней частоты вниз до окончания длительности свипирования. В результате этого длительность свипирования установит ограничение на нижнюю частотную границу спектра свипирования; ниже этой границы требования не будут удовлетворяться. Это иллюстрируется на Фигуре 5 (красная кривая 520). Если заданы максимальная частота 70 Гц и длительность свипирования 5 секунд, то минимальная частота, которой может достичь свипирование, ограничена значением приблизительно 16 Гц. Для расширения частотного диапазона (например, снижения минимального предела частоты) можно увеличить длительность свипирования, однако, увеличение длительности свипирования может снизить производительность разведки.
[0061] В некоторых вариантах воплощения изобретения сейсмическая разведка может осуществляться с помощью более чем одной системы вибраторов. В таких случаях способы расчета схемы свипирования могут быть применены к каждой системе морских сейсмических вибраторов. Морские сейсмические вибраторы можно разместить в некотором диапазоне глубин, и рассмотренные здесь способы можно применить к любой глубине.
[0062] В некоторых вариантах воплощения изобретения новую систему морских вибраторов можно сформировать из существующих вибраторов. Эту систему морских вибраторов можно использовать в качестве источника для морской сейсмической разведки. Система морских вибраторов содержит по меньшей мере один морской сейсмический вибратор. Блок управления вибратором связан с системой вибраторов, при этом блок управления вибратором может управлять работой вибратора для осуществления свипирования по диапазону частот в соответствии с одной или большим количеством функций свипирования. Функция свипирования может базироваться на требованиях к качеству. Функция свипирования может быть функцией частоты. Требование к качеству может быть любым из упомянутых выше требований к качеству. Блок управления вибратором может быть специально выделенным блоком управления или частью системы управления, контролирующей проведение разведки. Систему вибраторов может буксировать судно, выделенное специально для источника, или сейсморазведочное судно, буксирующее морские сейсмические косы для проведения разведки.
[0063] Описанные выше примеры основаны на двумерных данных наблюдений. Однако, в случае применения для трехмерной разведки преимущества описанных выше способов и аппаратуры могут быть более значительными, поскольку коэффициент накапливания более высокий. Описанные выше способы и аппаратура могут применяться в равной мере и в этом случае.
[0064] Способы и аппаратура, описанные в заявке с регистрационным номером IS11.0203, находящейся на рассмотрении одновременно с настоящей заявкой, делают применение морских сейсмических вибраторов практически осуществимым. Однако, остается еще несколько проблем, препятствующих ведению морской сейсмической разведки с помощью источников непрерывного действия. В отличие от источников непрерывного действия (например, вибраторов), применяемых для наземной сейсмической разведки, где источники находятся в неподвижном положении в процессе вибрации, в некоторых случаях морской сейсмической разведки источники перемещаются на значительные расстояния в процессе вибрации, т. е. в то время, когда идет излучение сигналов. Обычно при проведении морской сейсмической разведки исследовательское судно буксирует источники и приемники со скоростью приблизительно 2,5 м/с. В процессе 5-секундного свипирования судно (и все источники и приемники) проходит 12,5 м; за время 10-секундного свипирования оно проходит 25 м. Этими расстояниями нельзя пренебречь, когда порядок разрешающей способности сейсмических изображений составляет метры.
[0065] Для визуализации процесса размытия рассмотрим линейное свипирование, происходящее в виде генерации сигнала с повышением частоты от 5 Гц до 75 Гц в течение 10 секунд. Компонента изображения, полученная на частоте 75 Гц, и компонента, полученная на частоте 5 Гц, созданы источниками, которые фактически переместились на 25 м. Можно представить семейство отдельных одночастотных изображений, каждое из которых будет по-разному смещено размытием. Например, изображение, полученное на частоте 75 Гц, будет смещено на 25 м по отношению к изображению, полученному на частоте 5 Гц. Может понадобиться корректировка (например, очистка). Очистка состоит в том, чтобы сместить изображения на соответствующее расстояние и сложить их, хотя ее не обязательно выполнять таким путем.
[0066] Корректировку (очистку) в принципе можно выполнить напрямую, но этому могут препятствовать две вещи: (1) данные получают с недостаточной частотой дискретизации в общем диапазоне приемника, в котором обычно выполняется и очистка, и (2) выходной сигнал вибратора может содержать искажения (гармоники). Одно преимущество морского применения (над наземным) состоит в том, что форму исходного импульса, включая гармоники, можно аккуратно измерить, например, с помощью расположенных поблизости гидрофонов.
[0067] Фазовая погрешность, вызванная размытием при работе вибратора синусоидального сигнала, может представлять собой сдвиг фазы, обусловленный расстоянием между номинальным положением стрельбы x0 и положением x(f), находясь в котором вибратор излучает на рассматриваемой частоте. Эту фазовую погрешность можно выразить как:
 ур.1
ур.1
где:
E (f, TOA) - это фазовая погрешность при частоте f и угле выхода сигнала TOA,
B(f) - это амплитуда одночастотной генерации вибратора на частоте f,
x(f) - это положение, из которого излучение ведется на частоте f,
x0 - это номинальное положение стрельбы,
dt/df(f) - величина, обратная скорости свипирования при частоте f
TOA - это угол выхода сигнала (по отношению к вертикали) по направлению к дальнему полю.
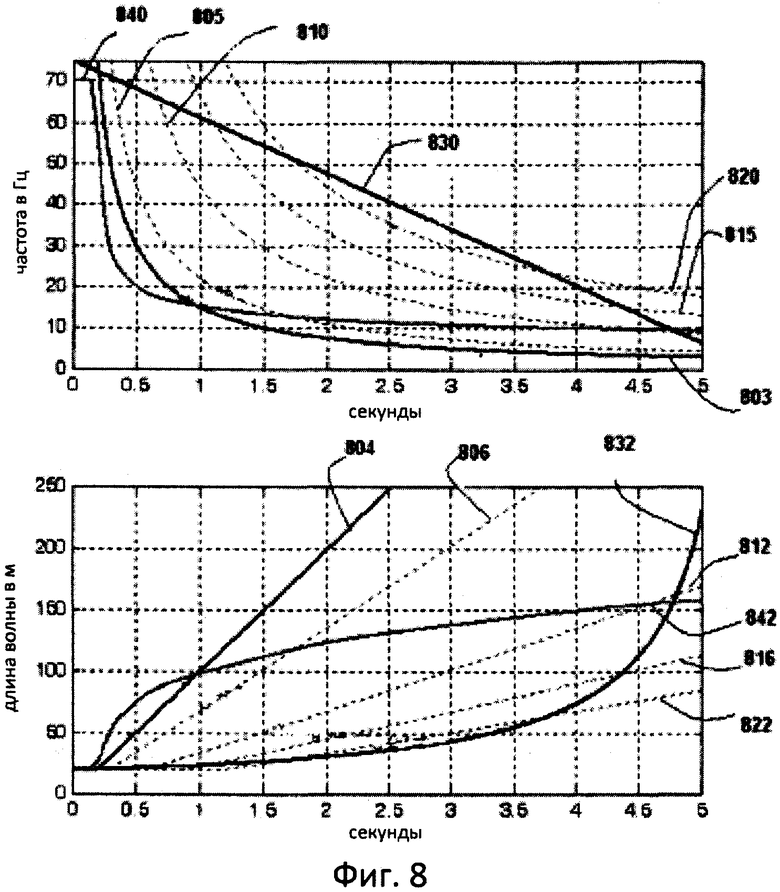
[0068] Если функция f(t) выбрана, то фазовую погрешность можно оценить в диапазоне углов ТОА для каждой частоты свипирования. Самую большую погрешность по диапазону ТОА можно использовать как погрешность для данной частоты. На Фигуре 8 показаны кривые фазовой погрешности для нескольких различных функций свипирования.
[0069] Критерий погрешности может быть установлен как максимальная амплитуда и фазовая погрешность. Для рассмотренных ниже примеров пороговые значения погрешности установлены в режиме восстановления из свертки и очистки от размытия (если это применимо) импульсов от дальнего поля при углах выхода сигнала (ТОА) между 0 (вертикаль) и приблизительно 22 градусами. Этот диапазон ТОА выбран как типичный для сигнала, входящего в геологическую среду, и для иллюстративной цели. Эти критерии допустимости погрешности могут быть следующими: погрешность источника сигнала в дальнем поле не превышает 3,4 градуса по фазе и 0,5 дБ по значению энергии во всем диапазоне ТОА. Эти критерии оставляют погрешность приблизительно в 6% по амплитуде сигнала, т. е. не выше 24 дБ на уровне выстрела. Эти произвольно выбранные пороговые значения погрешности взяты для облегчения рассмотрения. Действительные пороговые значения погрешности могут быть выбраны на основе множества схем разведки или качественных параметров.
[0070] В рассмотренных ниже примерах длительность свипирования составляет 5 или 10 секунд, а глубина внедрения составляет 8 м. Эти примеры являются иллюстративными, и применяться могут любые другие значения длительности и глубины внедрения.
[0071] Ниже рассмотрено несколько режимов свипирования, включая обычное «линейно-частотное» свипирование (синяя кривая, например, 830 на Фигуре 8), которое подразумевает, что основная частота является линейной функцией времени; «линейное свипирование длины волны» (красная кривая, например, 806, 812, 816 и 822), подразумевающее, что основная длина волны является линейной функцией времени; свипирование «с ничтожной погрешностью» (например, 803 или 804), подразумевающее, что фазовая погрешность меньше порогового значения погрешности (т. е. ничтожно мала), и очистку можно не выполнять; и свипирование «на основе ОСШ» (например, 840), подразумевающее, что функция свипирования выбрана на основе определенного отношения сигнала к шуму (ОСШ) на изображении или на основе другого критерия, базирующегося на качестве, что описано в заявке, находящейся на одновременном рассмотрении с настоящей заявкой, с регистрационным номером IS11.0203, которая включена сюда в полном объеме для всех целей.
[0072] На Фигуре 8 показаны фазовые погрешности для нескольких различных вариантов свипирования длительностью 5 секунд. На верхней диаграмме показаны фазовые погрешности как функции частоты и времени свипирования для синусоидального вибратора; на нижней диаграмме фазовые погрешности показаны как функции длины волны и времени свипирования для аналогичных синусоидальных вибраторов. В этих примерах сделано допущение, что вибраторы излучают только на основных частотах, т. е. источники излучают только на одной частоте в один момент времени в соответствии с функцией свипирования, и каждая частота излучается только с одного положения. Пунктирные кривые 820, 815, 810, 805 и 803 являются кривыми при постоянной фазовой погрешности, при этом фазовые погрешности составляют, соответственно, 20 градусов, 15, 10, 5 и 3,4 градуса. Например, кривая 820 иллюстрирует кривую с постоянной фазовой погрешностью в 20 градусов на протяжении процесса свипирования. Кривая 803 иллюстрирует кривую с постоянной фазовой погрешностью в 3,4 градуса. Эта кривая 802 может быть функцией свипирования, и если вибратор проходит по частотам согласно этой кривой, то итоговая фазовая погрешность на результирующем изображении составляет величину 3,4 градуса, которой можно пренебречь для многих целей.
[0073] На той же самой верхней диаграмме на Фигуре 8 показаны две другие кривые свипирования: синяя кривая 830, представляющая линейное свипирование по частоте, и оранжевая кривая 840 - свипирование на основе ОСШ. Как показано на этой диаграмме, если применяется линейное свипирование по частоте 830, то фазовые погрешности будут существенными на большинстве частот. Например, для частот между 50 Гц и 25 Гц фазовые погрешности превышают 20 градусов. Для небольшого числа самых верхних частот (свыше 70 Гц) или самых низких частот (ниже приблизительно 5 Гц) фазовые погрешности близки к ничтожно малому уровню (т. е. 3,4 градуса) или ниже.
[0074] На этой диаграмме видно, что хотя свипирование 840 выбрано на основе качества изображения, его фазовые погрешности на большинстве частот довольно малые. В этом примере при высоких частотах, превышающих приблизительно 15 Гц, фазовые погрешности могут быть ничтожно малыми (например, ниже порогового значения погрешности в 3,4 градуса). Для частот между 15 Гц и 12 Гц фазовые погрешности составляют 4-10 градусов. И только на частотах ниже приблизительно 12 Гц эти фазовые погрешности становятся значительными, т. е. превышают 10 градусов. Если в качестве функции свипирования применяется свипирование 840, то может понадобиться очистка для частот ниже приблизительно 15 Гц или для времени свипирования после 1 секунды. На низкочастотном краю (т. е. ниже приблизительно 15 Гц) недостаточность выборки или искажение информации не может быть проблемой. Следовательно, очистку от размытия можно осуществить намного легче в этом режиме свипирования, чем в случае высоких частот и проблем с искажением информации.
[0075] Нижняя диаграмма Фигуры 8 иллюстрирует подобные фазовые погрешности, но в диапазоне длин волн. На этой нижней диаграмме Фигуры 8 кривые 804, 806, 812, 816 и 822 являются кривыми с постоянной фазовой погрешностью, соответственно, в 3,4, 5, 10, 15 и 20 градусов. Синяя кривая 832 представляет линейное свипирование по частоте, а оранжевая кривая 842 - свипирование, выбранное на основе ОСШ. Зеленая кривая 804 представляет свипирование с фазовой погрешностью 3,4 градуса, которая может считаться пренебрежимо малой погрешностью для многих целей, и очистку от размытия можно не проводить.
[0076] Зеленую кривую 804 или кривую свипирования «с ничтожным размытием» можно приблизительно описать в виде f(t)=15/t, где f - это частота в Гц, t - это время в секундах, а пороговое значение фазовой погрешности установлено на уровне 3,4 градуса; или в более общем виде f(t)=4,4<φ/t, где φ - это приемлемое значение фазовой погрешности в градусах.
[0077] Если морские сейсмические вибраторы излучают сигналы без искажений, как в примерах на Фигуре 8, то процесс очистки от размытия можно выполнять так, как описано выше. В некоторых случаях выбор определенных функций свипирования может сделать очистку ненужной.
[0078] На Фигуре 9 сравниваются свипирования, представленные на Фигуре 8, со свипированиями с применением процесса очистки. В этих примерах сделано допущение, что источники не излучают искажений, т. е. гармонических частот. Пунктирные кривые 930, 940 и 903 иллюстрируют погрешности (фазовую погрешность - на верхней диаграмме, амплитудную погрешность - на нижней диаграмме) для линейного свипирования по частоте, свипирования на основе ОСШ и свипирования с ничтожным размытием. В случае применения процесса очистки все фазовые погрешности можно скорректировать, как показано сплошными кривыми 932, 904, 942 на Фигуре 9. Амплитудные погрешности 950 ничтожны даже без коррекции очисткой в этих примерах, где нет искажения, при этом пороговое значение 955 амплитудной погрешности установлено на уровне 0,5 дБ. Синусоидальная очистка может полностью исправить погрешности для синусоидального вибратора.
[0079] Многие вибраторы кроме синусоидального выходного сигнала могут генерировать гармоники. В отличие от вибраторов, применяющихся для наземной сейсмической разведки, действительные сигналы от источников можно наблюдать с помощью акселерометров, установленных на вибраторах.
[0080] Вследствие гармонических искажений, когда источники могут излучать каждую частоту из нескольких различных положений, процесс очистки будет более сложным, чем при отсутствии гармонических искажений. Например, источник может излучать на частоте 60 Гц в том положении, где режим свипирования требует 60 Гц, но он также может излучать 60 Гц как гармонику, когда режим свипирования требует 30 Гц, 20 Гц или 15 Гц и т. д. Если применяется синусоидальная очистка, то делается допущение, что вся энергия частоты 60 Гц излучается в положении X1, где режим свипирования требует 60 Гц. Это приводит к ошибке из-за гармоник n-го порядка для невертикального излучения, поскольку энергия этой же частоты излучалась в положениях X2 (30 Гц), X3 (30 Гц), X4 (15 Гц) и т. д. Погрешность сигнала, связанную с положением гармоник, можно выразить, как в Уравнении 2. Если очистка не осуществлялась, тогда оставшуюся погрешность можно выразить Уравнением 3. Уравнение 3 становится Уравнением 1, если все A(i) установлены на ноль для i>1, т. е. для синусоидального источника.
 ур.2
ур.2
где:
B(f) - это основная амплитуда одночастотной генерации вибратора на частоте f,
n - это порядок гармоники,
A(n) - это комплексное значение амплитуды гармоники n-ного порядка данного импульса, A(1)=1,
x(f) - это положение, где осуществляется излучение на частоте f,
dt/df(f) - величина, обратная скорости свипирования при частоте f. Если эту величину поделить на порядок гармоники, то получим dt/df для этой гармоники.
 ур.3
ур.3
где x0 - это номинальное положение для стрельбы. Все остальные символы - те же, что и в Уравнении 2.
[0081] Фигура 10 иллюстрирует сравнение вариантов свипирования, представленных на Фигуре 8, и, в случае применения процессов очистки, как на Фигуре 9. В отличие от примеров, представленных на Фигуре 9, в этих примерах на Фигуре 10 сделано допущение, что источники на самом деле генерируют и искажения, т. е. частоты гармоник. Величины искажений, представляющие собой отношения энергий всех гармоник к энергии основной частоты, в этих примерах составляют приблизительно 7,9%. При наличии этих гармонических искажений фазовые погрешности и амплитудные погрешности для линейного свипирования по частоте (синяя кривая 1030, 1032) и свипирования, рассчитанного на основе ОСШ (оранжевая кривая ==1040, 1042), не будут ничтожно малыми, поэтому необходима очистка. Даже после очистки фазовые погрешности не полностью исправляются (1033, 1043). Для линейного свипирования кривая фазовой погрешности 1033 возрастает приблизительно от нуля градусов на частоте приблизительно 20 Гц до 8 градусов на частоте 75 Гц. Для свипирования на основе ОСШ 1043 даже после очистки фазовая погрешность составляет приблизительно 4 градуса в полосе частот приблизительно от 28 Гц до 50 Гц и становится бесконечной при 70 Гц. Для свипирования «с ничтожно малым размытием» 1003 и 1004 эти погрешности также будут больше, чем в последних примерах. В этих вариантах свипирования «с ничтожно малым размытием» фазовая и амплитудная погрешности все же остаются достаточно малыми, чтобы ими можно было пренебречь. Амплитудная погрешность для линейного свипирования 1034 имеет величину, которой нельзя пренебречь, на частотах свыше 40 Гц даже после очистки, или процесс очистки не может надлежащим образом исправить эти погрешности, вызванные гармоническими искажениями. Для свипирования на основе ОСШ или свипирования «с ничтожно малым размытием» амплитудные погрешности 1044 и 1006 остаются ничтожно малыми.
[0082] Очевидно, что линейное свипирование по частоте не является оптимальной функцией свипирования для морского сейсмического вибратора. При наличии значительного размытия или гармонического искажения данные, полученные с помощью линейного свипирования по частоте, могут содержать большие погрешности даже после процесса очистки. Свипирование, выбранное на основе ОСШ, может обеспечить данные с меньшим количеством погрешностей, а большинство этих погрешностей можно исправить посредством процесса очистки. Свипирование «с ничтожно малым размытием» может обеспечить данные, содержащие ничтожно малые погрешности, и в процессе обработки этих данных может не потребоваться применение процесса очистки.
[0083] В случае применения источника непрерывного действия, например, морского сейсмического вибратора или наземного сейсмического вибратора, часто используют деконволюцию для сжатия требуемых данных в диапазоне времени. Перед осуществлением процесса деконволюции требуемых сейсмических данных может потребоваться очистка. Как показано выше, в случае применения свипирования «с ничтожно малым размытием» погрешности имеют достаточно малую величину, благодаря чему процесс очистки не требуется. В случае применения других вариантов свипирования погрешности могут не быть ничтожно малыми, и очистка может потребоваться. Во многих операциях гармоническое искажение является обычным явлением, как показано на Фигуре 10, это наблюдается в тех случаях, когда вибраторы генерируют гармонические частоты в дополнение к основным частотам, по которым ведется свипирование. Очистка от размытия осуществляется с учетом знания того, на каких частотах ведется излучение в каких положениях. Очистка сжимает источник в пространстве.
[0084] Деконволюция исходного импульса источника осуществляется с помощью оценки исходного импульса источника. Теоретически очистку и деконволюцию можно выполнить на одном этапе и преобразовать данные в такую форму, какая была бы получена в случае применения импульсного источника в номинальных положениях стрельбы. Однако, это может быть удобнее, если делать двумя упрощенными этапами: 1) «деконволюция с игнорированием размытия», за которой следует 2) «синусоидальная очистка от размытия».
[0085] Следует отметить, что для более высоких частот требуется более точное положение источника, чем для более низких частот. Как показано в этих примерах, свипирование лучше осуществлять с верхних частот к нижним. При проведении наземной разведки вибраторы обычно осуществляют свипирование вверх по частоте, в результате чего погрешности при оценке формы исходного импульса проявляются раньше (там, где сигнал сильнее).
[0086] Как показано на Фигуре 11, способ 1100 можно вкратце подытожить следующим образом:
- выбор критерия допустимости величины размытия (1110);
- выбор нелинейной функции, осуществляющей свипирование по частоте сверху вниз (1120);
- вычисление величин размытия для каждой частоты (1130);
- осуществление работы вибраторов в соответствии с функцией свипирования (1140);
- получение морских сейсмических данных (1150); и
- выполнение очистки полученных данных для частот, где величины размытия превышают установленные выше критерии (1160).
[0087] После исправления размытия данные можно подвергнуть дальнейшей обработке для других целей, например, дальнейшей обработке данных для получения сейсмических изображений, сейсмического моделирования, сейсмической интерпретации и т. п.
[0088] Следует отметить, что не все действия в способе 1100 являются необходимыми. Например, если функцию свипирования выбрали в соответствии с критериями допустимого размытия, например, свипирование «с ничтожно малым размытием», то размытие в результирующих данных будет на уровне критерия погрешности или ниже. Величины размытия не требуется вычислять, и очистка не требуется. Действия 1130, 1160 не требуются.
[0089] Если кривая выбранной функции свипирования находится ниже кривой допустимых значений размытия, которая в некоторых из представленных выше примеров составляет приблизительно 15/t, например, если выбрать f(t)<15/t, то результирующие уровни размытия также будут ниже критериев искажения. В этом случае очистка также не требуется.
[0090] Для процесса получения данных морской сейсмической разведки может не потребоваться выполнение действий по обработке данных. Полученные данные можно обработать позднее посредством отдельной операции обработки данных. В таком случае в процессе получения данных вычисление величин размытия (1130) и операция очистки (1160) не требуются. В ходе процесса обработки данных при известных функциях свипирования и соответствующих полученных данных величины размытия можно вычислить и сравнить с критерием допустимости размытия. При необходимости операцию очистки можно выполнять в процессе обработки данных.
[0091] В случае применения функции свипирования на основе ОСШ размытие происходит только на низких частотах (например, ниже 15 Гц), поэтому очистка требуется только на низких частотах.
[0092] Критерии допустимого размытия и функции свипирования выбирают до проведения морской сейсмической разведки или во время ее проведения. Если выбрана надлежащая функция свипирования, то проблем с размытием можно избежать, и процесс очистки не потребуется. В этом случае процесс обработки данных можно проводить так, как если бы проблем с размытием и не было.
[0093] Квалифицированным специалистам в данной области будет понятно, что можно комбинировать один или большее количество этапов рассмотренных выше способов и/или изменять порядок некоторых операций. Более того, некоторые операции можно комбинировать с аспектами других описанных здесь вариантов воплощения изобретения и/или изменять порядок выполнения некоторых операций. Процесс измерения, его интерпретацию и действия операторов можно осуществлять циклическим образом; эта концепция применима к описанным здесь способам. Наконец, части способов можно осуществлять с помощью любых приемлемых технологий, включая автоматизированную или полуавтоматическую работу на базе компьютерной системы 600, показанной на Фигуре 6.
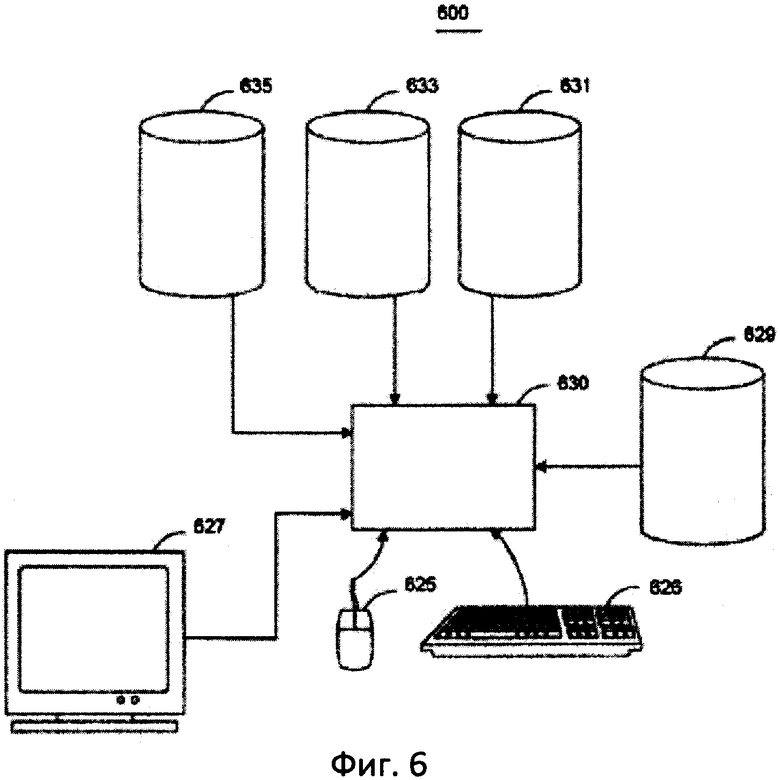
[0094] Части описанных выше способов можно осуществлять с помощью компьютерной системы 600, один из примеров которой показан на Фигуре 6. Системный компьютер 630 может быть связан с дисковыми запоминающими устройствами 629, 631, 633 и 635, которые могут быть внешними запоминающими устройствами на жестких дисках и измерительными датчиками (не показаны). Предусмотрено, что дисковые запоминающие устройства 629, 631, 633 и 635 могут быть традиционными носителями на жестких дисках, поэтому они могут быть задействованы с помощью локальной информационной сети или удаленного доступа. В то время как дисковые запоминающие устройства показаны как отдельные устройства, для хранения каких-либо или всех управляющих программ, данных измерений и результатов, по желанию, может быть использовано одно дисковое запоминающее устройство.
[0095] В одном варианте воплощения изобретения предусмотрено, что данные от датчиков, полученные в режиме реального времени, можно хранить в дисковом запоминающем устройстве 631. Различные данные, полученные от различных источников не в режиме реального времени, можно хранить в дисковом запоминающем устройстве 633. Системный компьютер 630 может извлекать соответствующие данные из дисковых запоминающих устройств 631 или 633 для обработки данных согласно управляющим программам, соответствующим воплощению различных описанных здесь вариантов. Управляющие программы могут быть написаны на языке программирования компьютера, например, C++, Java и т. п. Управляющие программы могут храниться в машиночитаемом носителе, например, в дисковом запоминающем устройстве 635. Такой машиночитаемый носитель может включать компьютерное запоминающее устройство.
[0096] В одном варианте воплощения изобретения системный компьютер 630 может выводить выходную информацию в основном на графический дисплей 627 или через принтер 628 (не показан). Системный компьютер 630 может хранить результаты, полученные с помощью описанных выше способов, на дисковом запоминающем устройстве 629 с целью дальнейшего их использования и последующего анализа. Системный компьютер 630 может быть оснащен клавиатурой 626 и указательным устройством (например, мышью, трекболом и т. п.) 625 для осуществления работы в интерактивном режиме.
[0097] Системный компьютер 630 может быть расположен на месте проведения разведки, например, может быть частью блока управления 23 на борту судна 20, как на Фигуре 1. Системный компьютер 630 может быть связан с оборудованием, осуществляющим разведку, для получения данных различных измерений. Такие данные после традиционного форматирования и другой первичной обработки могут быть записаны системным компьютером 630 на дисковое запоминающее устройство 631 или 633 в виде цифровой информации для последующего извлечения и обработки описанным выше способом. На Фигуре 6 дисковое запоминающее устройство, например, 631, показано непосредственно связанным с системным компьютером 630, однако, доступ к этому дисковому запоминающему устройству может осуществляться также через локальную информационную сеть или дистанционно. Кроме того, хотя дисковые запоминающие устройства 629, 631 показаны как отдельные устройства для хранения входных данных и результатов анализа, однако, эти дисковые запоминающие устройства 629, 631 можно реализовать внутри одного дискового носителя (совместно с дисковым устройством 633 для хранения программ или отдельно от него) или любым другим традиционным способом, известным квалифицированным специалистам в области, к которой относится настоящее изобретение.
[0098] Хотя выше в качестве примеров подробно описано лишь несколько вариантов воплощения настоящего изобретения, квалифицированные специалисты в данной области без труда увидят возможность для множества модификаций этих вариантов воплощения изобретения, не приводящих к выходу за рамки объема изобретения. Соответственно, предусмотрено, что все такие модификации включены в объем настоящего изобретения, определенный прилагающейся формулой изобретения. Пункты формулы изобретения, касающиеся устройств и их функций, должны охватывать описанные здесь конструкции, как выполняющие указанные функции, и не только в виде конструкционных эквивалентов, но и в виде эквивалентных конструкций. То есть, хотя гвоздь и шуруп могут не быть конструкционными эквивалентами, поскольку гвоздь имеет цилиндрическую поверхность, предназначенную для крепления деревянных деталей друг с другом, а шуруп имеет спиралевидную поверхность, однако, в части выполнения функции крепления деревянных деталей друг к другу гвоздь и шуруп могут быть эквивалентными конструкциями.
| название | год | авторы | номер документа |
|---|---|---|---|
| СВИПИРОВАНИЕ ДЛЯ МОРСКИХ ВИБРАТОРОВ | 2012 |
|
RU2546753C1 |
| ФАЗОВАЯ МОДУЛЯЦИЯ И МИНИМИЗАЦИЯ ШУМА ПРИ ОДНОВРЕМЕННЫХ ВИБРОСЕЙСМИЧЕСКИХ ИССЛЕДОВАНИЯХ | 2013 |
|
RU2573125C1 |
| УВЕЛИЧЕНИЕ СПЕКТРА НИЗКИХ ЧАСТОТ ВИБРОСЕЙСМИЧЕСКИХ ДАННЫХ ПРИ ОДНОВРЕМЕННОЙ МОРСКОЙ СЪЕМКЕ | 2012 |
|
RU2591231C2 |
| ОПРЕДЕЛЕНИЕ СОГЛАСОВАНИЯ ГЕОФОНА | 2004 |
|
RU2324955C2 |
| СЕЙСМИЧЕСКИЙ ВИБРАТОР, УПРАВЛЯЕМЫЙ С ПРЯМЫМ ОБНАРУЖЕНИЕМ ПЕРЕМЕЩЕНИЯ ПЛИТЫ ОСНОВАНИЯ | 2010 |
|
RU2503976C2 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СЕЙСМИЧЕСКИЙ КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2431868C1 |
| СПОСОБЫ ДЛЯ СОВМЕСТНОЙ НАЗЕМНОЙ ВИБРОСЕЙСМОРАЗВЕДКИ С ОДНОВРЕМЕННОЙ АКТИВАЦИЕЙ | 2018 |
|
RU2774213C2 |
| СПОСОБ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2714519C1 |
| СПОСОБ СЕЙСМИЧЕСКИХ ИССЛЕДОВАНИЙ НА АКВАТОРИЯХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2592739C1 |
| СПОСОБ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ ПРИ ПОИСКЕ УГЛЕВОДОРОДОВ И СПОСОБ ОПРЕДЕЛЕНИЯ ЗАЛЕГАНИЯ ПРОДУКТИВНЫХ НА УГЛЕВОДОРОДЫ ПЛАСТОВ И СЕЙСМИЧЕСКАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2433425C2 |
Изобретение относится к области геофизики и может быть использовано при проведении сейсморазведочных работ для обнаружения месторождений нефти и газа. Предложены способ и устройство для морской сейсмической разведки с использованием одного или более перемещающихся морских сейсмических вибраторов. При этом функция свипирования для вибратора основывается на критерии допустимого размытия и является нелинейной функцией, осуществляющей свипирование по частоте сверху вниз. Полученные данные могут использоваться непосредственно без очистки или могут быть легко и просто очищены. Технический результат - повышение точности разведочных данных. 3 н. и 18 з.п. ф-лы, 11 ил.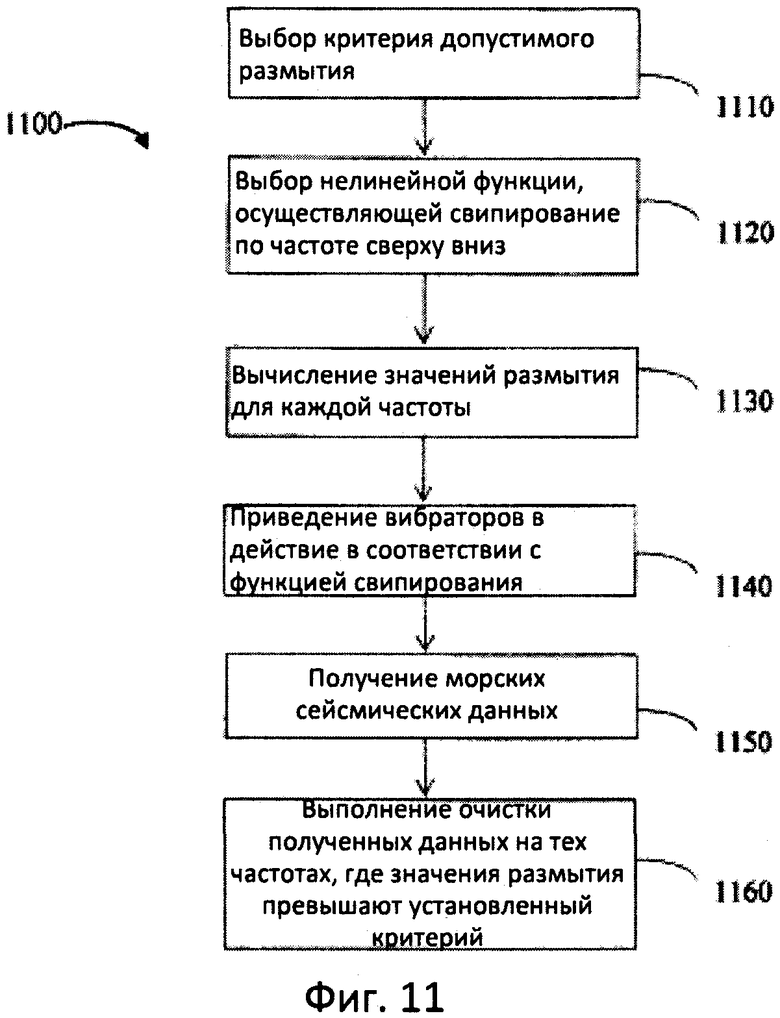
1.Способ функционирования морского сейсмического вибратора в качестве движущегося источника для морской сейсмической разведки, включающий:
выбор нелинейной функции, осуществляющей свипирование по частотам сверху вниз на основе критерия допустимого размытия;
приведение морского сейсмического вибратора в действие в соответствии с этой функцией свипирования; и
получение данных морской сейсмической разведки.
2. Способ по п. 1, отличающийся тем, что он дополнительно включает:
обработку полученных данных морской сейсмической разведки для определения свойств глубинного участка Земли.
3. Способ по п. 1, отличающийся тем, что критерий допустимого размытия включает пороговое значение фазовой погрешности и пороговое значение амплитудной погрешности.
4. Способ по п. 3, отличающийся тем, что нелинейная функция свипирования f(t), осуществляющая свипирование по частоте сверху вниз, при выражении в частотно-временном диапазоне является функцией, не превышающей критерия допустимого размытия.
5. Способ по п. 4, отличающийся тем, что пороговое значение фазовой погрешности составляет φ в градусах, а функция свипирования является функцией, не превышающей 4,4 φ/t.
6. Способ по п. 1, отличающийся тем, что он дополнительно включает:
вычисление значения размытия для каждой частоты; и
выполнение очистки полученных данных для частот, на которых значение размытия превышает установленный критерий.
7. Способ по п. 6, отличающийся тем, что функция свипирования является функцией на основе требования к качеству.
8. Способ по п. 6, отличающийся тем, что требование к качеству является требованием соблюдения заданной величины отношения сигнала к шуму (ОСШ) по всей полосе частот, применяемых для получения изображения.
9. Способ по п. 8, отличающийся тем, что очистку осуществляют на низкочастотном краю полученных данных - вплоть до 20 Гц.
10. Установка для морской сейсмической разведки, содержащая:
по меньшей мере один морской сейсмический вибратор, сконфигурированный для осуществления свипирования акустической энергии с верхних частот к нижним; и
блок управления вибратором, управляющий работой вибратора; при этом
блок управления вибратором содержит функцию свипирования, осуществление которой заставляет вибратор проходить по частотам в соответствии с этой функцией свипирования, при этом вибратор перемещается; и
функция свипирования основывается на критерии допустимого размытия.
11. Установка по п. 10, отличающаяся тем, что она дополнительно содержит:
по меньшей мере одну морскую сейсмическую косу, имеющую морские сейсмические датчики; и
сейсмическое судно, буксирующее по меньшей мере одну сейсмическую косу;
при этом в процессе работы морского сейсмического вибратора сейсмическая коса принимает сейсмические данные.
12. Установка по п. 10, отличающаяся тем, что критерий допустимого размытия включает пороговое значение фазовой погрешности и пороговое значение амплитудной погрешности.
13. Установка по п. 12, отличающаяся тем, что нелинейная функция свипирования f(t), осуществляющая свипирование по частоте сверху вниз, выраженная в частотно-временном диапазоне, является функцией, не превышающей критерия допустимого размытия.
14. Установка по п. 11, отличающаяся тем, что она дополнительно содержит процессор, конфигурация которого позволяет обрабатывать полученные сейсмические данные для определения свойств глубинного участка Земли.
15. Машиночитаемый носитель, содержащий машиночитаемые программы, выполнение которых процессором побуждает движущийся морской сейсмический вибратор излучать сейсмическую энергию в соответствии с функцией свипирования, при этом функция свипирования является нелинейной функцией, осуществляющей свипирование по частоте сверху вниз на основании критерия допустимого размытия.
16. Машиночитаемый носитель по п. 15, отличающийся тем, что критерий допустимого размытия содержит пороговое значение фазовой погрешности и пороговое значение амплитудной погрешности.
17. Машиночитаемый носитель по п. 15, отличающийся тем, что нелинейная функция свипирования f(t), осуществляющая свипирование по частоте сверху вниз, выраженная в частотно-временном диапазоне, является функцией, не превышающей критерия допустимого размытия.
18. Машиночитаемый носитель по п. 15, отличающийся тем, что выполнение машиночитаемых инструкций процессором вынуждает процессор:
вычислять величину размытия по каждой частоте; и
выполнять очистку полученных данных для тех частот, на которых величина размытия превышает установленный критерий.
19. Машиночитаемый носитель по п. 18, отличающийся тем, что функция свипирования является функцией на основе требования к качеству.
20. Машиночитаемый носитель по п. 18, отличающийся тем, что требование к качеству является требованием соблюдения заданной величины отношения сигнала к шуму (ОСШ) по всей полосе частот, применяемых для получения изображения.
21. Машиночитаемый носитель по п. 20, отличающийся тем, что очистку осуществляют на низкочастотном краю полученных данных - вплоть до 20 Гц.
| US 6152256 A1, 28.11.2000 | |||
| US 4670863 A, 02.06.1987 | |||
| WO 2009026024 A2, 26.02.2009 | |||
| US 7639567 B2, 29.12.2009 | |||
| US 6151556 А, 21.11.2000 |

