Изобретение относится к системам технического зрения и предназначено для более точного выделения границ объектов на полутоновых растровых изображениях, что повышает эффективность процесса их распознавания.
Реальные растровые изображения, получаемые с ПЗС-матриц видеокамер, могут содержать затененные и засвеченные участки. На одном и том же изображении могут встречаться светлые объекты на темном фоне и, наоборот, темные объекты на светлом фоне.
Выделение контуров объектов на полутоновых растровых изображениях можно осуществлять совместно с выделением самих объектов. Для этого обычно используют пороговые методы сегментации на основе среднего значения яркости пикселей, например, [Павлидис Т. Алгоритмы машинной графики и обработка изображений: Пер. с англ. - М.: Радио и связь, 1986, стр.86.]. В данном методе вначале в некоторой области определяют среднее значение яркости пикселей изображения, задают пороговое значение, а затем в ней выделяют объекты, если яркость пикселей в ней по модулю превышает данное пороговое значение, либо в противном случае принимается решение о том, что область однородна.
Данный метод дает хорошие результаты при распознавании специальных изображений, в которых на однородном светлом фоне присутствуют темные объекты или, наоборот, на темном общем фоне присутствуют светлые объекты. Такие изображения получают при съемке объектов под микроскопом, фотографировании лиц и т.д. Однако в изображениях с реальным освещением и произвольным набором объектов зачастую встречаются одновременно оба случая - темные объекты на светлом фоне и светлые объекты на темном фоне. В этой ситуации данный метод дает плохие результаты либо вообще не применим.
Наиболее близким по совокупности признаков является градиентный способ выделения контуров объектов на матрице полутонового растрового изображения [Андреев А.Л. Автоматизированные телевизионные системы наблюдения. Часть II. Арифметико-логические основы и алгоритмы. Уч. пособие. СПб, СПбГУИТМО, 2005, с.35-38. http://window.edu.ru/window/library], заключающийся в том, что для всех пикселей растрового изображения по заранее выбранному способу вычисляется норма или квадрат нормы градиента изменения их яркости, затем на новой черно-белой монохромной матрице черным цветом на белом фоне выделяют все элементы, у которых значение нормы или квадрата нормы градиента больше некоторого порогового значения, а в качестве контуров объектов на монохромной матрице принимают связные конфигурации элементов черного цвета.
Задачей изобретения является повышение качества автоматизированных алгоритмов выделения контуров объектов на растровых изображениях за счет обоснованного выбора порогового значения нормы градиента и дополнительной отбраковки ошибочно выделенных в качестве контуров участков изображений.
Поставленная задача достигается тем, что предложен градиентный способ выделения контуров объектов на матрице полутонового растрового изображения, заключающийся в том, что для всех пикселей растрового изображения по заранее выбранному способу вычисляют норму или квадрат нормы градиента изменения их яркости, затем на новой черно-белой монохромной матрице черным цветом на белом фоне выделяют все элементы, у которых значение нормы или квадрата нормы градиента больше некоторого порогового значения, а в качестве контуров объектов на монохромной матрице принимают связные конфигурации элементов черного цвета, в котором согласно изобретению, для выбранного способа вычисления градиента экспериментально определяют коэффициент, затем рассчитывают пороговое значение квадрата нормы градиента как произведение данного коэффициента на сумму квадратов средних величин модулей изменения яркости соседних пикселей по строкам и столбцам, у которых значения превышают общие средние уровни ненулевых изменений, соответственно, по строкам и столбцам, а среди связных конфигураций элементов черного цвета на монохромной матрице сразу отбрасывают конфигурации, у которых число входящих элементов менее 5-7 элементов, для оставшихся конфигураций вычисляют среднюю степень соседства - частное от деления суммы по всем элементам конфигурации соседних с ним элементов на сумму элементов в конфигурации, причем те конфигурации, у которых средняя степень соседства менее 3, отбрасывают, как погрешности распознавания, а оставшиеся принимают в качестве искомых контуров объектов.
Рассмотрим прямоугольное полутоновое растровое изображение размерами n×m (n - число строк, m - число столбцов). Изменения яркости f(i,j) пикселей растрового изображения вызваны двумя основными причинами: 1) контурами объектов, содержащихся на изображении, 2) изменением освещенности поверхностей самих объектов. Обычно в первом случае изменение яркости резкое, но оно происходит на небольших участках изображения. Во втором случае изменения невелики, но они захватывают основную часть матрицы изображения. Средние уровни изменения ненулевых значений яркости пикселей изображения соответственно, по строкам и столбцам равны
 ;
;  ;
;
Nг Nв - общие числа ненулевых изменений яркости, соответственно, в строках и столбцах матрицы.
Для обычных изображений в величинах mfг, mfв основной вклад вносят изменения типа 2) - освещенности поверхностей самих объектов.
Поэтому модули строковых разностей /f(i+1,j)-f(i,j)/, превышающие mfг, и модули разностей в столбцах /f(i,j+1)-f(i,j)/, превышающие mfв, относятся в основном к типу 1) и отражают изменение яркости пикселей на границах между объектами, содержащимися на изображении. Средние значения данных величин Mfг, Mfв характеризуют изменение яркости на границах объектов изображения.
Пороговое значение при распознавании контуров объектов принимается равным P=k(Mfг 2+Mfв 2), где k - постоянный коэффициент, зависящий от способа вычисления градиента G(i,j).
На новой черно-белой монохромной матрице М черным цветом на белом фоне выделяют все элементы, у которых значение нормы или квадрата нормы градиента G(i,j) больше Р. В качестве контуров объектов на монохромной матрице принимают связные конфигурации элементов черного цвета.
Затем среди выделенных связных конфигураций удаляют все, у которых менее 5-7 элементов, поскольку они в силу своей малости не могут являться реальными контурами объектов.
Для оставшихся конфигураций вычисляют среднюю степень соседства - частное от деления суммы по всем элементам конфигурации соседних с ним элементов на сумму элементов в конфигурации, причем те конфигурации, у которых средняя степень соседства менее 3, отбрасывают как погрешности распознавания, а оставшиеся принимают в качестве контуров объектов. Конфигурации, у которых средняя степень соседства менее 3, обычно являются разреженные связными структурами, которые возникают при анализе освещенности поверхностей самих объектов и являются погрешностями распознавания.
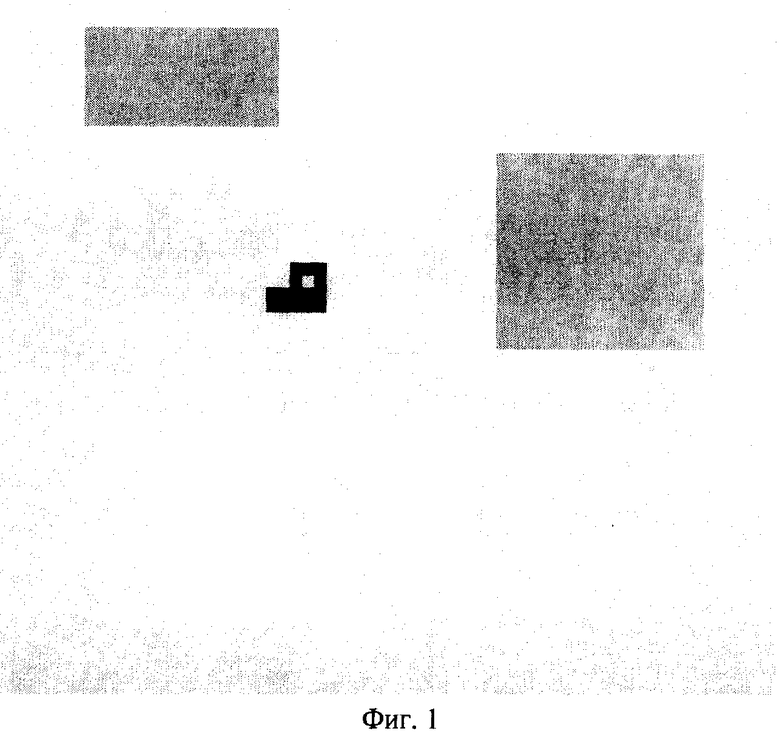
В качестве примера рассмотрим выделение контуров объектов на матрице модельного полутонового растрового изображения размером 64×64, приведенной на фиг.1.
Для него получены средние уровни изменения ненулевых значений яркости пикселей изображения по строкам и столбцам mfг=4,30, mfв=4,39.
Средние значения модулей строковых разностей /f(i+1,j)-f(i,j)/, превышающих mfг, и модулей разностей в столбцах /f(i,j+1)-f(i,j)/, превышающих mfв, Mfг=17,19; Mfв=26,79.
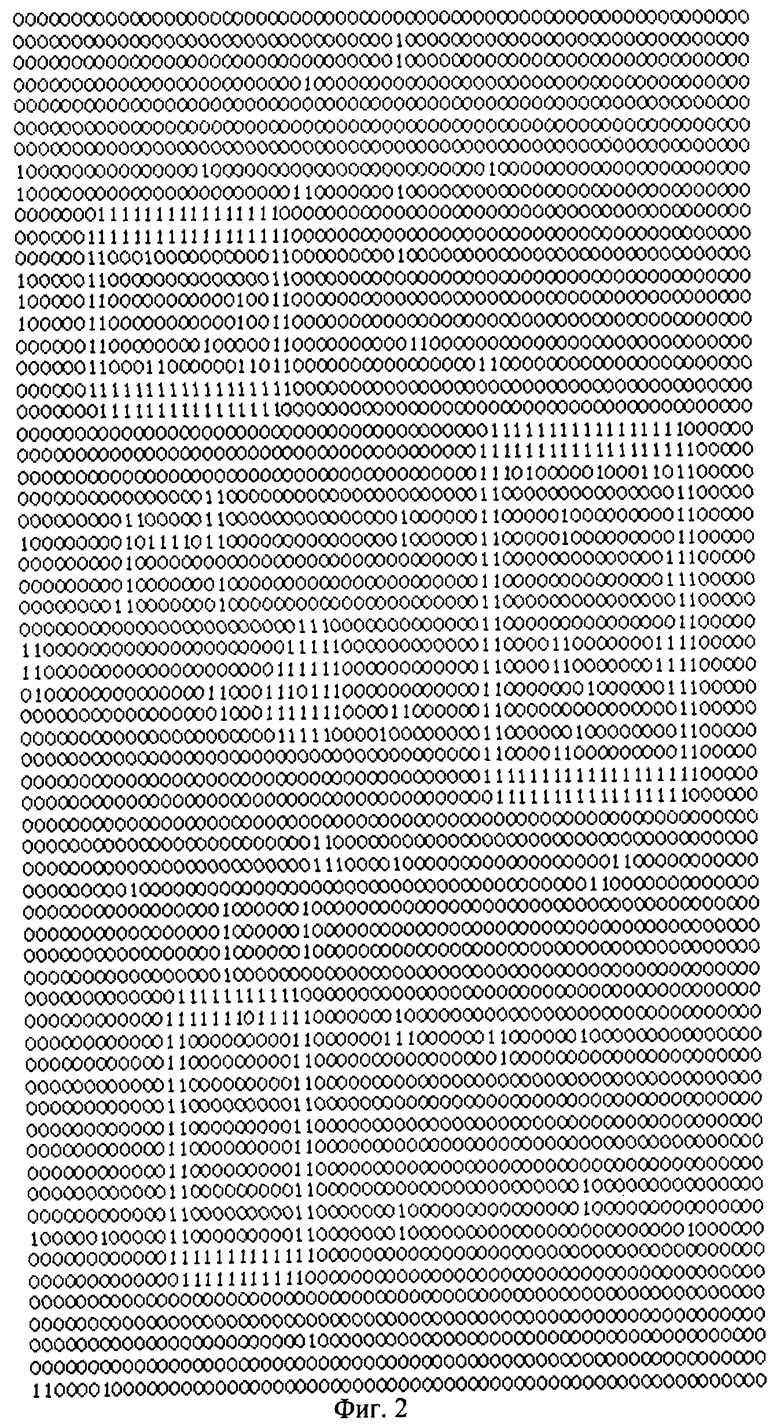
Квадрат нормы градиента G(i,j) вычислялся по формуле
/G(i,j)/2=/f(i-1,j)-f(i,j)/2+/f(i+1,j)-f(i,j)/2+f(i,j+1)-f(i,j)/2+/f(i,j-1)-f(i,j)/2.
Для данной формулы в выражение для порогового значения при распознавании контуров объектов P=k(Mfг 2+Mfв 2) принят коэффициент k=0,16.
После распознавания получена монохромная матрица, показанная на фиг.2. Как видно, наряду с реальными контурами матрица содержит и погрешности распознавания в виде посторонних связных конфигураций.
После отбрасывания связных конфигураций с весами, меньшими 7 и имеющими среднюю степень соседства менее 3, на монохромной матрице остались контуры объектов, показанные на фиг.3. В данной матрице отбракованы все погрешности распознавания.
Предложенный способ позволяет повысить эффективность автоматизированный систем анализа растровых изображений.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ СЕГМЕНТАЦИИ ПОЛУТОНОВЫХ СЛОЖНОСТРУКТУРИРОВАННЫХ РАСТРОВЫХ ИЗОБРАЖЕНИЙ | 2014 |
|
RU2580074C1 |
| Способ адаптации антенной решетки градиентной процедурой с переменным шагом | 2021 |
|
RU2788589C1 |
| СПОСОБ СЕГМЕНТАЦИИ СЛОЖНОСТРУКТУРИРОВАННЫХ РАСТРОВЫХ ПОЛУТОНОВЫХ ИЗОБРАЖЕНИЙ НА ОСНОВЕ СОСТАВНЫХ МОРФОЛОГИЧЕСКИХ ОПЕРАТОРОВ | 2012 |
|
RU2510897C2 |
| Способ автоматической сегментации флюорограмм грудной клетки больных пневмонией | 2016 |
|
RU2629629C1 |
| СПОСОБ ПОЛУЧЕНИЯ ЦИФРОВЫХ ИЗОБРАЖЕНИЙ ПОВЕРХНОСТИ ПОРИСТОГО ТЕЛА С ЯРКОСТНЫМ РАЗДЕЛЕНИЕМ ОБЪЕКТОВ И ФОНА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2012 |
|
RU2536658C2 |
| СПОСОБ ПОМЕХОУСТОЙЧИВОГО ГРАДИЕНТНОГО ВЫДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ НА ЦИФРОВЫХ ПОЛУТОНОВЫХ ИЗОБРАЖЕНИЯХ | 2016 |
|
RU2648954C2 |
| СПОСОБ И СИСТЕМА ПРЕОБРАЗОВАНИЯ МОМЕНТАЛЬНОГО СНИМКА ЭКРАНА В МЕТАФАЙЛ | 2013 |
|
RU2534005C2 |
| Способ помехоустойчивого градиентного выделения контуров объектов на цифровых полутоновых изображениях | 2018 |
|
RU2695417C1 |
| СПОСОБ И СИСТЕМА ЭФФЕКТИВНОЙ ПОДГОТОВКИ СОДЕРЖАЩИХ ТЕКСТ ИЗОБРАЖЕНИЙ К ОПТИЧЕСКОМУ РАСПОЗНАВАНИЮ СИМВОЛОВ | 2016 |
|
RU2636097C1 |
| СПОСОБ ПОМЕХОУСТОЙЧИВОГО ГРАДИЕНТНОГО ВЫДЕЛЕНИЯ КОНТУРОВ ОБЪЕКТОВ НА ЦИФРОВЫХ ИЗОБРАЖЕНИЯХ | 2008 |
|
RU2360289C1 |

Изобретение относится к системам технического зрения для выделения границ объектов на полутоновых растровых изображениях. Техническим результатом является повышение качества выделения контуров объектов на растровых изображениях. Предложен градиентный способ выделения контуров объектов на матрице полутонового растрового изображения, заключающийся в том, что для всех пикселей растрового изображения согласно выбранному способу вычисляют норму или квадрат нормы градиента изменения их яркости, затем на новой черно-белой монохромной матрице черным цветом на белом фоне выделяют все элементы, у которых значение нормы или квадрата нормы градиента больше порогового значения, а в качестве контуров объектов на монохромной матрице принимают связные конфигурации элементов черного цвета, для выбранного способа вычисления градиента определяют коэффициент, затем рассчитывают пороговое значение квадрата нормы градиента как произведение данного коэффициента на сумму квадратов средних величин модулей изменения яркости соседних пикселей по строкам и столбцам, у которых значения превышают общие средние уровни ненулевых изменений, соответственно, по строкам и столбцам, а среди связных конфигураций элементов черного цвета на монохромной матрице сразу отбрасывают конфигурации, у которых число входящих элементов менее 5-7 элементов, для оставшихся конфигураций вычисляют среднюю степень соседства - частное от деления суммы по всем элементам конфигурации соседних с ним элементов на сумму элементов в конфигурации, причем те конфигурации, у которых средняя степень соседства менее 3, отбрасывают, а оставшиеся принимают в качестве искомых контуров объектов. 3 ил.
Градиентный способ выделения контуров объектов на матрице полутонового растрового изображения, заключающийся в том, что для всех пикселей растрового изображения по заранее выбранному способу вычисляют норму или квадрат нормы градиента изменения их яркости, затем на новой черно-белой монохромной матрице черным цветом на белом фоне выделяют все элементы, у которых значение нормы или квадрата нормы градиента больше некоторого порогового значения, а в качестве контуров объектов на монохромной матрице принимают связные конфигурации элементов черного цвета, отличающийся тем, что для выбранного способа вычисления градиента экспериментально определяют коэффициент, затем рассчитывают пороговое значение квадрата нормы градиента как произведение данного коэффициента на сумму квадратов средних величин модулей изменения яркости соседних пикселей по строкам и столбцам, у которых значения превышают общие средние уровни ненулевых изменений соответственно по строкам и столбцам, а среди связных конфигураций элементов черного цвета на монохромной матрице сразу отбрасывают конфигурации, у которых число входящих элементов менее 5-7 элементов, для оставшихся конфигураций вычисляют среднюю степень соседства - частное от деления суммы по всем элементам конфигурации соседних с ним элементов на сумму элементов в конфигурации, причем те конфигурации, у которых средняя степень соседства менее 3, отбрасывают, как погрешности распознавания, а оставшиеся принимают в качестве искомых контуров объектов.
| АНДРЕЕВ А.Л | |||
| Автоматизированные телевизионные системы наблюдения, ч.II, Арифметико-логические основы и алгоритмы, Санкт-Петербургский ГУИТМО, 2005 | |||
| Способ растрового воспроизведения полутоновых оригиналов при электрическом репродуцировании | 1982 |
|
SU1288934A1 |
| СПОСОБ И СХЕМА ВЫДЕЛЕНИЯ КОНТУРА | 2000 |
|
RU2256297C2 |
| WO 9413098 А1, 09.06.1994 | |||
| US 6151409 А, 21.11.2000 | |||
| ШАПИРО Л., СТОКМАН Дж | |||
| Компьютерное зрение, Москва, БИНОМ Лаборатория знаний, 2006, с.382-402. | |||

