Настоящее изобретение относится к лифтовой установке, имеющей по меньшей мере одну шахту, в которой с возможностью перемещения вдоль общего пути движения установлены по меньшей мере две кабины, каждая из которых снабжена ловителем и каждой из которых соответствует свой блок управления, привод и тормоз, и оснащенной шахтной информационной системой, предназначенной для определения местоположения и скоростей кабин и связанной с электрическим предохранительным (страховочным) устройством.
Для достижения высокой производительности лифтовых установок при как можно меньшем занимаемом ими пространстве ранее было предложено выполнять их таким образом, чтобы в одной шахте вдоль общего пути движения могли перемещаться вверх и вниз по меньшей мере две кабины. Благодаря этому в одной шахте лифтовой установки за короткий период времени можно перевезти много пассажиров и/или большой объем груза. Вместе с тем организация движения нескольких кабин по общему пути требует принятия дополнительных мер, предупреждающих столкновение кабин. Для этого в заявке ЕР 0769469 А1 предлагается снабжать каждую кабину блоком управления, имеющим предохранительный модуль, регулирующий ускорение и торможение кабины не только при возникшей опасности столкновения, но и в нормальном режиме работы лифтовой установки. С этой целью данные местоположения, скорости и распределения текущих вызовов кабин, требующих обслуживания, передаются с помощью системы связи в предохранительный модуль, рассчитывающий на основании заданных характеристик движения для каждой кабины необходимые параметры ускорения и торможения и вырабатывающий решение о необходимости остановки или торможения кабины. На каждой кабине могут быть расположены инфракрасные датчики, измеряющие расстояние от этой кабины до соседних, находящихся сверху и снизу, кабин. Помимо этого предлагается также использовать шахтную информационную систему, например расположенные в шахте мерные линейки, сканируемые установленными на кабине датчиками, выполненными в виде фотоэлектрических устройств, использующих принцип прерывания светового потока. На основании полученных при сканировании данных определяются скорости и местоположения всех кабин, и полученные результаты с помощью системы связи передаются в модули безопасности всех кабин для регулирования параметров их торможения. Управление кабинами осуществляется предохранительными модулями как в нормальном режиме работы лифтовой установки, так и в случае возникновения опасности столкновения кабин.
Несмотря на то что при подобном управлении кабинами можно обеспечить высокую производительность лифтовой установки и исключить столкновение кабин, такое управление отличается значительной сложностью и связано с относительно высокими расходами. Кроме того, сложность управления делает его ненадежным.
В основу настоящего изобретения была положена задача усовершенствования лифтовой системы указанного в начале описания типа таким образом, чтобы конструктивно простыми средствами обеспечить высокую производительность и при этом гарантированно исключить столкновение кабин.
Указанная задача решается согласно изобретению с помощью лифтовой установки, отличительные признаки которой представлены в п.1 формулы изобретения.
Согласно изобретению каждой кабине соответствует свой блок управления, привод и тормоз. Помимо блоков управления, предусмотренных по одному на каждую кабину, используется также предохранительное (страховочное) устройство. В нормальном, или штатном, режиме работы лифтовой установки управление кабинами осуществляется посредством блоков управления независимо от предохранительного устройства с соблюдением кабинами безопасного расстояния. Предохранительное устройство вызывает экстренную остановку кабины, если расстояние от этой кабины до соседней с ней кабины или до конца пути движения меньше задаваемого критического расстояния. Это критическое расстояние можно задавать таким образом, чтобы при экстренной остановке кабины гарантировать, что необходимый для этого тормозной путь позволит избежать столкновения. Если при сравнении фактического расстояния с критическим предохранительное устройство определит, что фактическое расстояние оказалось меньше критического и, следовательно, возникла опасность столкновения кабин, то предохранительное устройство вызовет экстренную остановку кабины.
Еще одно достоинство настоящего изобретения заключается в надежном исключении возможности столкновения кабин даже в случае неисправности предохранительного устройства или при недостаточно высокой скорости торможения после перехода в режим экстренной остановки. Для этого согласно изобретению предлагается приводить в действие ловитель кабины, если расстояние от этой кабины до соседней с ней кабины или до конца пути движения меньше заданного минимально допустимого расстояния. При этом минимально допустимое расстояние выбирается меньшим по сравнению с указанным выше критическим расстоянием, однако в любом случае минимально допустимое расстояние выбирается таким образом, чтобы исключить столкновение кабин с учетом тормозного пути, возникающего при срабатывании ловителя. Таким образом, даже в случае неисправности предохранительного устройства при продолжающемся приближении кабины к соседней кабине или к концу пути движения и сокращении указанного расстояния между ними до величины, меньшей минимально допустимого расстояния, гарантируется срабатывание ловителя, а значит и предотвращение столкновения кабин.
Дополнительный выигрыш в безопасности за счет применения предлагаемой в изобретении лифтовой установки достигается за счет того, что блоки управления по меньшей мере всех кабин, расположенных на одном пути движения, связаны между собой, образуя в совокупности устройство группового управления. С помощью устройства группового управления можно контролировать движение всех кабин, перемещающихся вдоль общего для них пути движения. В состав устройства группового управления входят блоки управления соответствующих кабин, соединенные между собой проводной или беспроводной связью и управляющие всеми кабинами благодаря взаимодействию между собой. Благодаря такому взаимодействию можно отказаться от применения центрального устройства управления кабинами, находящимися на одном пути движения. В предпочтительном варианте блоки управления соединены между собой системой шин. Согласно другому варианту можно использовать отдельные соединительные линии. Кроме того, можно предусмотреть соединение световодами или беспроводное соединение, например, с использованием радиоволн или светового излучения. За счет отказа от применения центрального блока управления лифтовую систему можно выполнить особо надежной в эксплуатации, поскольку в результате выхода из строя одного единственного блока управления нельзя будет эксплуатировать лишь кабину, функционально связанную с этим блоком управления, а остальные кабины продолжают работать в обычном режиме.
Критическое расстояние целесообразно определять в зависимости от скорости и/или направления движения кабин(-ы). Тем самым при определении критического расстояния становится возможным учитывать зависящую от скорости кабины характеристику ее торможения, в результате чего по сравнению с небольшой скоростью можно предусмотреть для высокой скорости большее критическое расстояние. Благодаря этому создается возможность значительно сближать кабины с небольшой скоростью для их осмотра или обслуживания без перехода в режим экстренной остановки, а для кабин, перемещающихся с номинальной скоростью, задается сравнительно большая величина критического расстояния. Зависимость величины критического расстояния от направления движения кабин позволяет принимать во внимание влияние направления на величину тормозного пути, который потребуется для соответствующей кабины.
В предпочтительном варианте для предохранительного устройства можно предварительно задать координаты местоположения определенных мест или точек внутри шахты, в том числе местоположения верхнего и нижнего концов пути движения, и предохранительное устройство может вызывать экстренную остановку, если расстояние от кабины до заданного места в шахте меньше критического расстояния.
Критическое расстояние особенно целесообразно определять также в зависимости от скорости, а предпочтительно - и от направления, движения второй кабины, к которой приближается первая кабина. В этом случае, например, при следовании друг за другом двух кабин в одном и том же направлении критическое расстояние можно задавать меньшим, чем если бы кабины двигались навстречу друг другу.
Предпочтительный вариант осуществления изобретения предусматривает соединение блоков управления кабин, расположенных на различных путях движения с образованием устройства группового управления. Благодаря такому устройству становится возможным регистрировать данные о перемещениях множества кабин с целью обеспечить по возможности максимальную производительность установки. Предпочтительно связать между собой блоки управления всех кабин лифтовой установки с образованием устройства группового управления, позволяющего координировать перемещения всех кабин.
В предпочтительном варианте блоки управления кабин связаны с шахтной информационной системой для управления соответствующими им кабинами с соблюдением зависящего от скорости, предпочтительно - также от направления движения, расстояния от кабины до соседних с ней кабин или до конца пути движения, а также предпочтительно до заданного места или точки в шахте. Подобное соединение блоков управления обеспечивает особенно высокую производительность, поскольку с помощью шахтной информационной системы в совокупность блоков управления, т.е. в устройство группового управления, можно передавать данные местоположения и скоростей движения всех кабин, находящихся по меньшей мере на одном пути движения, благодаря чему становится возможным вычислять расстояния между кабинами с помощью блоков управления и сравнивать эти расстояния с безопасным расстоянием, зависящим от скоростей перемещения кабин. Если фактическое расстояние оказывается меньше безопасного расстояния, которое можно задавать большим по сравнению с критическим расстоянием, обусловливающим переход в режим экстренной остановки, то с помощью блоков управления можно изменить скорость по меньшей мере одной кабины и тем самым снова восстановить безопасное расстояние. Таким образом, блоки управления не только принимают на себя выполнение функции оптимизации управления соответствующими кабинами для повышения производительности установки, но и образуют такую первую ступень безопасности, которая отслеживает фактические расстояния до соседних кабин, а также до заданных мест или точек в шахте, прежде всего до конца пути движения, и при необходимости управляет движением кабин для соблюдения ими безопасных расстояний.
В предпочтительном выполнении блоки управления способны отключать привод соответствующей кабины и приводить в действие ее тормоз. Следовательно, блоки управления могут воздействовать на тормоза непосредственно и притормаживать кабины таким образом, чтобы обеспечивать соблюдение безопасных расстояний, зависящих от скоростей(-и) и предпочтительно также от направления движения кабин(-ы). При взаимном сближении двух кабин на недопустимо близкое расстояние в зависимости от направления движения можно отключать один привод или оба привода и тормозить кабины. При перемещении кабин навстречу друг другу можно отключать оба привода и приводить в действие оба тормоза, а при перемещении кабин в одном и том же направлении можно отключать лишь привод кабины, находящейся позади в направлении перемещения, и приводить в действие ее тормоз.
Дополнительному повышению производительности лифтовой установки способствует включение в состав лифтовой установки пультов для ввода площадки назначения, расположенных за пределами кабин и соединенных с блоками управления. Пассажир или пользователь лифтовой установки, находясь за пределами кабины, может задать совокупности блоков управления, т.е. устройству группового управления площадку назначения, т.е. цель поездки. После этого с учетом необходимости соблюдения безопасных расстояний и обеспечения оптимальной производительности данное устройство выбирает самую подходящую кабину, которая доставит пассажира в течение как можно более короткого промежутка времени на требуемую площадку (этаж), при этом совершив как можно меньше промежуточных остановок. Для выбора самой подходящей кабины можно также использовать другие критерии, например расход электроэнергии либо по возможности равномерную выработку ресурса отдельными кабинами или иными связанными с кабинами компонентами.
В предпочтительном варианте пульты для ввода площадки назначения содержат блок индикации (дисплей) для указания кабины, которой можно воспользоваться. Благодаря этому на пульте для ввода площадки назначения можно отображать кабину, подаваемую пассажиру(-ам).
Особым преимуществом характеризуется вариант, в котором предохранительное устройство содержит несколько предохранительных блоков, по одному на кабину. При этом, в частности, можно предусмотреть размещение соответствующего предохранительного блока на самой кабине. Предохранительные блоки могут быть связаны между собой проводной или беспроводной связью, например световодами, системой шин, а также радиосвязью. Благодаря подобной связи предохранительное устройство становится особо надежным в эксплуатации, поскольку выход из строя одного предохранительного блока приводит к выводу из эксплуатации лишь кабины, функционально связанной с этим блоком безопасности, однако контроль остальных кабин, а следовательно, и функционирование в целом лифтовой установки не претерпевают никаких изменений несмотря на выход из строя одного предохранительного блока.
В предпочтительном варианте установки предохранительное устройство содержит по меньшей мере один блок определения расстояний, выполненный с возможностью определения расстояния от кабины до соседней с ней кабины или до конца пути движения, а предпочтительно - и до заданного места или точки в шахте, на основании данных местоположения кабин. В подобном варианте укачанные расстояния определяются автоматически на основании данных местоположения, предоставляемых шахтной информационной системой. Для этого в блоки определения расстояния могут передаваться данные местоположения соседних кабин. Помимо этого можно предусмотреть предварительную передачу в блоки определения расстояния таких данных, как координаты положения определенных мест или точек в шахте, прежде всего координаты положения верхнего и нижнего концов пути движения. С этой целью блоки определения расстояния можно оснастить программируемыми запоминающими устройствами, в которых можно сохранять координаты положения определенных мест или точек в шахте.
Взамен или дополнительно можно также включать в состав лифтовой установки датчики расстояния для определения расстояния от определенной кабины до соседней кабины или до конца пути движения и предпочтительно также до заданного места или точки в шахте, при этом датчики расстояния (должны быть) соединены с предохранительным устройством. Датчики расстояния позволяют непосредственно определять расстояния без использования для этого указанных выше координат.
В предпочтительном варианте датчики расстояния расположены на кабинах, например, в зоне их пола или потолка.
В качестве датчиков расстояния можно использовать, например, инфракрасные, ультразвуковые или лазерные датчики.
В особенно предпочтительном варианте выполнения предлагаемой в изобретении лифтовой установки в состав предохранительного устройства предлагается включать вычислительный блок, предназначенный для определения критического расстояния, предпочтительно зависящего от скоростей(-и) и предпочтительно также от направления движения кабин(-ы). Как указано в начале описания, посредством предохранительного устройства можно экстренно остановить кабину, если фактическое текущее расстояние от кабины до соседней кабины или до конца пути движения оказалось меньше критического расстояния. Для определения этого критического расстояния используется вычислительный блок. Последний может быть выполнен, например, в виде запоминающего устройства и предназначен для сохранения в нем значений критического расстояния, зависящего от скоростей(-и) и предпочтительно также от направления движения кабин(-ы). В этом случае в запоминающем устройстве можно сохранять данные о направлении и скорости движения соответствующей этому устройству кабины и предпочтительно по меньшей мере ближайшей соседней кабины, благодаря чему из этого запоминающего устройства впоследствии можно считывать величину критического расстояния, соответствующего определенной скорости и определенному направлению перемещения кабин(-ы).
Согласно другому варианту предлагается использовать вычислительный блок, на основании предварительно заданных технических характеристик лифтовой установки вычисляющий критическое расстояние, соответствующее определенной скорости и предпочтительно определенному направлению перемещения кабин(-ы).
В предпочтительном варианте предохранительное устройство содержит блок сравнения, предназначенный для сравнения фактического, т.е. действительного, расстояния от определенной кабины до соседней кабины или до конца пути движения с заданным критическим расстоянием, зависящим предпочтительно от скорости и, соответственно, от направления движения кабин(-ы), а также для выработки сигнала экстренной остановки, если это фактическое расстояние меньше критического расстояния.
Согласно предпочтительному варианту блок сравнения связан с расположенным за ним блоком управления тормозом, в который (блок) может быть направлен выработанный блоком сравнения сигнал экстренной остановки, и вслед за этим блок управления тормозом направляет управляющий сигнал в тормоз на приведение в действие последнего.
В предпочтительном варианте в состав лифтовой установки входит по меньшей мере один блок определения скорости, предназначенный для определения скорости кабин(-ы). При этом на каждую кабину целесообразно предусмотреть отдельный блок определения скорости. Так, в частности, предлагается размещать блок определения скорости на соответствующей ему кабине.
Согласно другому варианту блок определения скорости можно встроить в предохранительное устройство и соединить с кабиной проводной или беспроводной связью.
В соответствии с конструктивно наиболее простым вариантом выполнения лифтовой установки, отличающимся также своей особо высокой надежностью в эксплуатации, предлагается включать в состав шахтной информационной системы расположенную в шахте и/или на кабинах систему разметки с множеством меток, считываемых считывающими устройствами, расположенными, соответственно, на кабинах и/или в шахте и связанными с предохранительным устройством.
В предпочтительном варианте система разметки расположена внутри шахты, а на каждой кабине установлено считывающее устройство, предназначенное для считывания меток.
Процесс считывания меток может осуществляться бесконтактным методом, при этом можно предусмотреть считывание меток системы разметки прежде всего магнитным и/или оптическим методами.
Из считывающих устройств в предохранительное устройство может передаваться электрический сигнал, содержащий в закодированном виде местоположение и предпочтительно также скорость, а также направление движения кабины. Входящий в состав предохранительного устройства декодирующий блок может декодировать этот сигнал для последующей обработки данных местоположения, направления и/или скорости движения кабины.
Система разметки может содержать, например, расположенные на носителе штрихкодовые символы, а считывающие устройства могут быть выполнены в виде устройств считывания штрихкода. При этом устройства считывания штрихкода могут быть выполнены в виде лазерных сканеров.
С помощью устройств считывания штрихкода можно считывать оптическим методом штрихкод, расположенный на носителе. При этом штрихкод отображает текущее местоположение, а изменение данных местоположения в единицу времени представляет собой меру скорости кабины, на которой установлено устройство считывания штрихкода. Направление движения кабины может быть определено на основании последовательно изменяющихся данных местоположения. Устройство считывания штрихкода передает в предохранительное устройство и в блок управления кабины электрический сигнал, содержащий всю информацию, необходимую для определения местоположения, направления и скорости движения соответствующей кабины. Для обеспечения бесперебойной работы предлагается также предусмотреть соединение первого устройства считывания штрихкода с предохранительным устройством, а второго устройства считывания штрихкода - с блоком управления.
Как указано в начале описания, изобретение предусматривает дополнительно к переводу кабины в режим экстренной остановки приведение в действие по меньшей мере одного ловителя при недопустимом сближении двух кабин. Согласно следующему предпочтительному варианту осуществления изобретения ловитель предлагается приводить в действие механически.
При этом целесообразно, чтобы каждая кабина была снабжена элементом, выступающим в направлении соседней кабины, а также упорным элементом для приведения в действие ловителя, при этом при достижении расстояния между двумя соседними кабинами, меньшего минимально допустимого расстояния, по меньшей мере один выступающий элемент воздействует на упорный элемент, приводя в действие ловитель. Расстояние от выступающего элемента до соответствующей кабины, а также место расположения упорного элемента на кабине выбираются таким образом, чтобы выступающий элемент одной кабины соударялся с упорным элементом другой кабины, когда расстояние между обеими кабинами соответствует заданному минимально допустимому расстоянию между ними. Величина этого минимально допустимого расстояния выбирается таким образом, чтобы после приведения в действие ловителя кабина гарантированно останавливалась в пределах минимально допустимого расстояния.
Таким образом, можно предусмотреть, чтобы ловитель первой кабины срабатывал от соударения выступающего элемента первой кабины с упорным элементом соседней с ней второй кабины. Для этого выступающий элемент первой кабины кинематически связан с ее ловителем. Если, например, первая кабина перемещается в направлении неподвижной второй кабины, то выступающий элемент первой кабины соударяется с упорным элементом или устройством неподвижной кабины при сокращении расстояния между этими кабинами до величины меньше минимально допустимого расстояния, и в результате этого приводится в действие ловитель перемещающейся кабины, обеспечивающий ее резкое торможение и остановку. Тем самым гарантированно исключается дальнейшее приближение первой кабины ко второй кабине.
Помимо этого существует возможность обеспечивать приведение в действие ловителя второй кабины от соударения выступающего элемента первой кабины с упорным элементом второй кабины. В этом случае упорный элемент второй кабины кинематически связан с ее ловителем. Если, например, кабина приближается недопустимым образом к неподвижной кабине, то выступающий элемент неподвижной кабины соударяется с упорным элементом перемещающейся кабины, благодаря чему приводится в действие ее ловитель, в результате чего кабина останавливается, пройдя короткий тормозной путь.
Предпочтительно, чтобы расстояние от выступающего элемента до соответствующей кабины было изменяемым, поскольку тем самым становится возможным задавать указанное расстояние с учетом предусмотренных для кабины параметров режима работы, прежде всего с учетом ее номинальной скорости.
Возможен вариант, согласно которому выступающий элемент соединен с соответствующей кабиной жесткими соединительными звеньями. Для этого согласно одному из предпочтительных особо экономичных вариантов предлагается соединять выступающий элемент рычагом с соответствующей кабиной.
В предпочтительном варианте выступающий элемент представляет собой удлиненный орган управления.
Обычно для каждой кабины предусмотрен канат ограничителя скорости, перемещающийся вместе с кабиной и связанный с соответствующим ловителем, предпочтительно его рычажным механизмом. При этом в предпочтительном варианте выступающий элемент присоединен к канату ограничителя скорости. Для этого можно предусмотреть, например, манжету или втулку, прикрепленную на заданном расстоянии от кабины к ее канату ее ограничителя скорости и при недопустимом сближении кабин взаимодействующую с упорным элементом соседней кабины.
В предпочтительном варианте выступающий элемент прикреплен к канату ограничителя скорости с возможностью перестановки. Благодаря этому создается возможность устанавливать выступающий элемент на различных расстояниях за счет его перестановки, например сдвига.
С целью обеспечить возможность преднамеренного сближения двух кабин на очень небольшое расстояние, например, для их осмотра или обслуживания согласно одному из наиболее предпочтительных вариантов выполнения предлагаемой в изобретении лифтовой установки упорный элемент предлагается устанавливать с возможностью возвратно-поступательного движения между рабочим положением, в котором об упорный элемент может удариться выступающий элемент другой кабины, и нерабочим положением, в котором выступающий элемент может проходить мимо упорного элемента (не касаясь его). Благодаря этому создается возможность переводить упорный элемент первой кабины в нерабочее положение при преднамеренном сближении с соседней кабиной, благодаря чему выступающий элемент второй кабины может проходить мимо упорного элемента первой кабины. Тем самым предотвращается приведение в действие ловителя при преднамеренном сближении обеих кабин на очень небольшое расстояние.
Для этого упорный элемент можно прикреплять к кабине с возможностью его перемещения, например поворота или сдвига. Вместо или дополнительно к этой возможности существует также возможность выполнять упорный элемент сборным из нескольких частей, при этом две части соединены между собой и раскрываются по типу книжки, благодаря чему выступающий элемент другой кабины может проходить между обеими частями упорного элемента.
Вместо и/или дополнительно к механическому приведению в действие ловителя в соответствии с еще одним наиболее предпочтительным вариантом выполнения предлагаемой в изобретении лифтовой установки ловитель предлагается приводить в действие посредством предохранительного устройства. При этом дополнительно к своей функции экстренной остановки кабины при сближении кабин на расстояние, меньшее критического, предохранительное устройство принимает на себя еще одну функцию, заключающуюся в приведении в действие ловителя по меньшей мере одной кабины при ее сближении с другой кабиной на еще одно расстояние, а именно на минимально допустимое расстояние.
При этом предохранительное устройство целесообразно оснащать вычислительным блоком, предназначенным для определения минимально допустимого расстояния между кабинами, зависящего от скорости движения кабин(-ы), а предпочтительно - и от направления движения кабин(-ы). Преимущество наличия вычислительного блока состоит в том, что при медленном сближении двух кабин минимально допустимое расстояние, по достижении которого срабатывает ловитель, можно задавать меньшим по сравнению с быстрым сближением кабин. Так, в частности, существует возможность задать с помощью вычислительного блока нулевую величину минимально допустимого расстояния при малой скорости сближения кабин в случае необходимости выполнить их осмотр или обслуживание, в результате чего две кабины могут войти в контакт друг с другом без приведения в действие ловителя. Тем самым вычислительный блок обеспечивает электронный контроль минимально допустимого расстояния, обусловливающего необходимость приведения в действие ловителя.
Вычислительный блок может быть выполнен, например, в виде запоминающего устройства, в котором хранится множество значений минимально допустимого расстояния как функции скорости и предпочтительно также направления движения кабин(-ы), благодаря чему из запоминающего устройства можно вызвать величину минимально допустимого расстояния в зависимости от текущей (мгновенной) скорости и текущего направления движения кабин(-ы).
Согласно другому варианту существует возможность рассчитывать величину минимально допустимого расстояния с помощью вычислительного блока.
Сравнение фактического расстояния с минимально допустимым расстоянием осуществляется предпочтительно с помощью блока сравнения, входящего в состав предохранительного устройства и вырабатывающего сигнал на приведение в действие ловителя, если фактическое расстояние между кабинами меньше минимально допустимого расстояния.
Ниже изобретение более подробно рассмотрено на примере некоторых предпочтительных вариантов его осуществления со ссылкой на прилагаемые чертежи, на которых показано:
на фиг.1 - схематичное изображение предлагаемой в изобретении лифтовой установки в первом варианте ее выполнения,
на фиг.2 - схематичное изображение предлагаемой в изобретении лифтовой установки во втором варианте ее выполнения, и
на фиг.3 - схематичное изображение предлагаемой в изобретении лифтовой установки в третьем варианте ее выполнения.
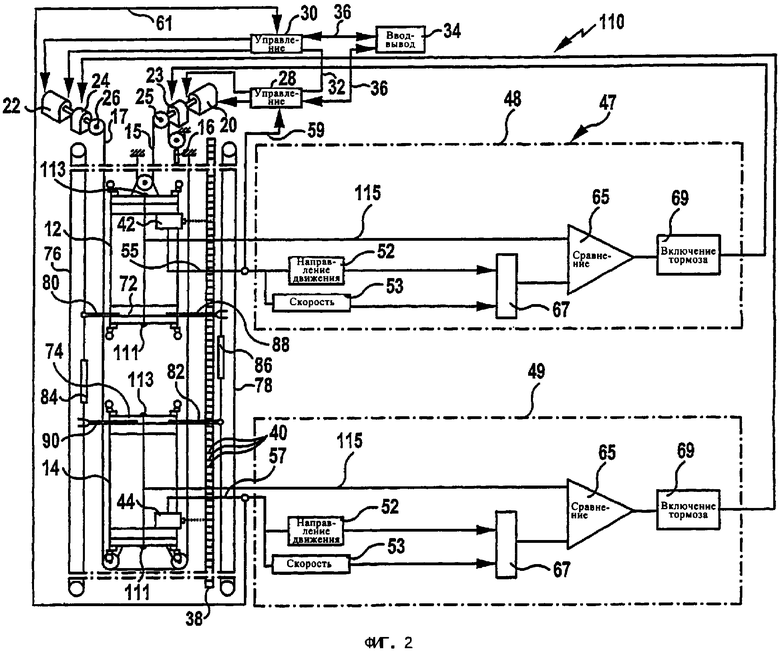
На фиг.1 в очень упрощенном виде представлена предлагаемая в изобретении лифтовая установка в ее первом варианте выполнения, обозначенная общей позицией 10. В состав лифтовой установки 10 входят две кабины 12, 14, установленные друг над другом в одной шахте (не показана) с возможностью перемещения вверх и вниз вдоль известного как такового и поэтому не показанного на чертеже общего пути движения. Кабина 12 соединена несущим канатом 15 с противовесом 16. Кабина 14 прикреплена к несущему канату 17, который, как и несущий канат 15, взаимодействует соответствующим образом с противовесом, не показанным, однако, на чертеже для сохранения наглядности.
Каждая кабина 12, 14 имеет отдельный привод в виде приводного электродвигателя, соответственно 20 и 22, а также отдельный тормоз, соответственно 23 и 24. Каждый приводной двигатель 20, 22 соединен с соответствующим приводным (канатоведущим) шкивом 25 и 26, охватываемым несущим канатом, соответственно 15 и 17.
Кабины 12, 14 перемещаются в вертикальном направлении вдоль общего для них пути движения по известным как таковым и поэтому не показанным на чертеже направляющим.
Для управления кабинами 12 и 14 на каждой из них предусмотрен отдельный блок управления, соответственно 28 и 30. Каждый блок 28, 30 управления электрически связан линией управления с соответствующим приводным двигателем 20 и 22, а также с соответствующим тормозом 23 и 24. Кроме того, блоки 28, 30 управления соединены соединительной линией 32 непосредственно друг с другом. Приводные двигатели 20, 22 и блоки 28, 30 управления позволяют обычным образом перемещать кабины 12 и 14 с пассажирами и/или грузами в шахте лифтовой установки.
Наряду с кабинами 12, 14 лифтовая установка 10 имеет установленные на каждом обслуживаемом этаже пульты 34 для ввода площадки назначения, позволяющие указать тот этаж, на который пассажир хочет подняться или опуститься. Для обеспечения большей наглядности фиг.1 на ней схематично показан лишь один пульт 34 для ввода площадки назначения. Эти пульты предназначены не только для указания площадки назначения, но помимо этого имеют также известный как таковой и поэтому не показанный на чертеже блок индикации, например дисплей, на котором блоки 28, 30 управления могут отображать кабину лифтовой установки, подаваемую пассажиру(-ам). Пульты 34 для ввода площадки назначения электрически соединены двунаправленными линиями 36 передачи с блоками 28 и 30 управления. Эти пульты могут быть выполнены, например, как сенсорные дисплеи в виде так называемых сенсорных экранов, обеспечивающих простой ввод или простое указание этажа как цели поездки, а также простое указание кабины, подаваемой пассажиру(-ам).
Блоки 28, 30 управления, управляющие соответственно кабинами 12, 14, образуют в своей совокупности электронное устройство группового управления лифтовой установки 10, при этом каждый блок 28, 30 управления, входящий в эту группу, может самостоятельно управлять соответствующей ему кабиной 12 и 14. Используя данные о площадках назначения, вводимые пассажирами с помощью расположенных за пределами кабин пультов 34 для ввода площадки назначения, устройство группового управления может очень быстро распределять кабины и обеспечивать оптимизированное управление поездками, а тем самым и исключительно высокую производительность с обеспечением повышенной их безопасности.
Лифтовая установка 10 имеет шахтную информационную систему в виде расположенного вдоль всего пути движения носителя 38 штрихкода со штрихкодовыми символами 40, которые могут считываться оптическими устройствами 42 и 44 считывания штрихкода, установленными соответственно на кабинах 12 и 14. Штрихкодовые символы 40 представляют в закодированном виде информацию о местоположении и считываются устройствами 42 и 44 считывания штрихкода. Таким образом считанные на расстоянии данные местоположения передаются устройствами 42 и 44 считывания штрихкода в виде электрических сигналов.
При перемещении кабин 12 или 14 в шахте соответствующие устройства 42 и 44 считывания штрихкода определяют текущее местоположение кабин 12, 14. Помимо этого на основании изменения данных местоположения в единицу времени можно определять скорости движения кабин 12, 14. Кроме того, считывание штрихкодовых символов 40 позволяет определять направление(-я) движения на основании последовательно получаемых данных местоположения кабин 12 и 14.
В состав лифтовой установки 10 входит предохранительное устройство 47, объединяющее соответствующие числу используемых кабин 12, 14 предохранительные блоки 48, 49, связанные соответственно с кабинами 12 и 14. Предохранительные блоки 48 и 49 выполнены одинаковыми и имеют по одному блоку 51 обработки данных местоположения кабины, по одному блоку 52 обработки данных направления движения кабины и по одному блоку 53 обработки данных скорости кабины. Блоки 51, 52, 53 обработки данных местоположения, направления и скорости движения кабины, входящие в состав предохранительного блока 48, электрически соединены линией 55 передачи данных с устройством 42 считывания штрихкода кабины 12, а блоки 51, 52, 53 обработки данных местоположения, направления и скорости движения кабины, входящие в состав предохранительного блока 49, электрически соединены соответствующей линией 57 передачи данных с устройством 44 считывания штрихкода кабины 14. На основании сигнала, полученного от соответствующих устройств 42 и 44 считывания штрихкода, указанные блоки 51, 52 и 53 вырабатывают соответственно сигналы местоположения, направления и скорости движения кабины. Соответствующие блоки обработки данных местоположения, направления и скорости движения кабины имеют также блоки 28 и 30 управления, соединенные соответственно входными линиями 59 и 61 с линиями 55 и 57 передачи данных. Таким образом, передаваемая устройствами 42 и 44 считывания штрихкода информация о местоположении, направлении и скорости движения кабин соответственно 12 и 14 поступает не только в предохранительное устройство 47, но и дополнительно в соответствующие блоки 28 и 30 управления.
Предохранительные блоки 48 и 49 имеют по одному блоку 63 определения расстояний, электрически связанному с блоками 51 обработки данных местоположения кабин обоих предохранительных блоков 48 и 49 и определяющему фактическое расстояние между обеими кабинами 12 и 14 на основании сигналов местоположения, вырабатываемых обоими блоками 51 обработки данных местоположения кабин. Затем электрический сигнал, соответствующий фактическому расстоянию между кабинами, из блока 63 определения расстояний передается в блок 65 сравнения, имеющийся в каждом предохранительном блоке 48 и 49. Блоки 65 сравнения имеют по два входа. На первый вход подается электрический сигнал блока 63 определения расстояний между кабинами, соответствующий фактическому расстоянию между обеими кабинами 12, 14. Второй вход блока 65 сравнения соединен с вычислительным блоком 67, который со стороны входа соединен с выходами или выводами блока 52 обработки данных направления движения кабины и блока 53 обработки данных о скорости движения кабины. Вычислительный блок 67 представляет собой память для записи-считывания. На стадии программирования в вычислительном блоке 67 сохраняют значения критического расстояния в зависимости от скорости и направления движения кабин(-ы), которые могут быть считаны во время работы лифтовой установки 10. В процессе перемещения кабин(-ы) в вычислительный блок 67 могут направляться сигналы, соответствующие скорости и направлению движения кабин(-ы), благодаря чему можно запросить заданное минимально допустимое расстояние между кабинами, соответствующее этим введенным данным или сигналам, и передать полученный ответ далее в блок 65 сравнения.
Критическое расстояние между кабинами, соответствующее направлению и скорости движения кабины 12 и/или 14, сравнивается в блоке 65 сравнения с фактическим расстоянием между соответствующей кабиной и соседней с ней кабиной. Если фактическое расстояние оказывается меньше критического расстояния, то блок 65 сравнения выдает сигнал экстренной остановки, соответствующий команде блоку 69 управления тормозом, последовательно подключенному к блоку 65 сравнения, подать электрический сигнал на приведение в действие тормоза 23, 24 соответствующей кабины 12, 14.
Как указано выше, электрические сигналы, выработанные устройствами 42 и 44 считывания штрихкода, подаются также по входным линиям 59 и 61 в блоки 28 и 30 управления, образующие в совокупности устройство группового управления. Благодаря этому в нормальном режиме работы лифтовой установки 10 создается возможность управлять с помощью блока 28, 30 управления кабинами 12 и 14 с соблюдением безопасного расстояния между ними.
Если при сбое в работе блоков 28, 30 управления и предохранительного устройства 47 или при переходе в режим экстренной остановки торможение кабин 12 и/или 14 оказывается недостаточно быстрым и кабины 12 и 14 продолжают сближаться, то на следующей стадии обеспечения безопасности (предупреждения столкновения) включается механическое устройство торможения кабин 12 и/или 14. Для этого кабины снабжены, соответственно, ловителями 72 и 74, которые сами по себе известны и потому показаны на чертеже лишь схематично, а также канатами 76 и 78 ограничителя скорости. Эти канаты охватывают обычным и поэтому схематично проиллюстрированным на чертеже образом расположенные в нижнем конце шахты лифтовой установки направляющие или отклоняющие ролики и расположенные в верхнем конце шахты лифтовой установки ограничители 79, 81 скорости и прикреплены соответственно к рычажным механизмам 80 и 82 ловителей кабин 12 и 14 соответственно. При превышении максимально допустимой скорости кабин 12, 14 ограничители 79, 81 скорости могут привести в действие соответствующие ловители 72, 74 посредством соответствующих канатов 76, 78 ограничителей скорости и рычажных механизмов 80 и 82 ловителей.
На канатах 76 и 78 ограничителя скорости на заданном расстоянии до соответствующей кабины 12 и 14 закреплено по одному элементу, выступающему в направлении соседней кабины, имеющему форму управляющей втулки 84 и 86 и взаимодействующему с расположенным на другой кабине упорным элементом в виде поворотного рычага 88, 90, кинематически связанного с ловителем 72, 74 соответственно. Управляющая втулка 84, соединенная с кабиной 12 канатом 76 ограничителя скорости, находится в направлении кабины 14 ниже нижнего края кабины 12, обращенного к кабине 14. Управляющая втулка 86, канатом 78 ограничителя скорости соединенная с кабиной 14, соответственно находится в направлении кабины 12 выше верхнего края кабины 14, обращенного к кабине 12.
Если, например, в случае сбоя в работе предохранительного устройства 47, а также при недостаточно быстром торможении кабин 12 и/или 14 после перехода в режим экстренной остановки кабины 12 и 14 продолжают недопустимое сближение, то управляющие втулки 84 и 86 ударяются соответственно о поворотные рычаги 90 и 88, выступающие из кабин 12, 14 в стороны. В результате упора управляющих втулок 84 и 86 в соответствующие поворотные рычаги 88 и 90 возникает усилие, воздействующее соответственно на ловители 72 и 74 и приводящее их в действие. В результате этого происходит обычное резкое торможение кабин, соответственно 12 и 14, которые, пройдя очень небольшой путь, останавливаются. Таким образом, механическими средствами достигается надежное предупреждение столкновения двух кабин 12 и 14.
Поворотные рычаги 88 и 90, кинематически связанные с соответствующими ловителями 72, 74, соединены соответственно с кабинами 12 и 14 и установлены с возможностью перемещения в горизонтальном направлении. Благодаря этому поворотные рычаги имеют возможность возвратно-поступательного движения между показанным на фиг.1 рабочим положением и нерабочим положением, в котором свободный конец поворотного рычага 88 и 90 расположен на расстоянии от соответствующего ему каната 78, 76 ограничителя скорости. Если поворотные рычаги 88 и 90 переместить в нерабочее положение, то в результате этого даже при очень сильном сближении обеих кабин 12 и 14 управляющие втулки 84 и 86 не будут наталкиваться на соответствующие поворотные рычаги 88 и 90, и ловители не сработают. Благодаря этому, например, при осмотре или обслуживании имеется возможность приблизить обе кабины 12 и 14 друг к другу с малой скоростью, при этом вычислительными блоками 67 предохранительных блоков 48 и 49 выдают очень малое значение критического расстояния между кабинами, определяющего ту границу, которую не должны пересекать обе кабины и при их приближении друг к другу на очень небольшое расстояние. Следовательно, исключается как экстренная остановка, так и срабатывание ловителя. Информация о необходимой малой скорости движения кабин может быть передана из блока 28, 30 управления в вычислительный блок 67.
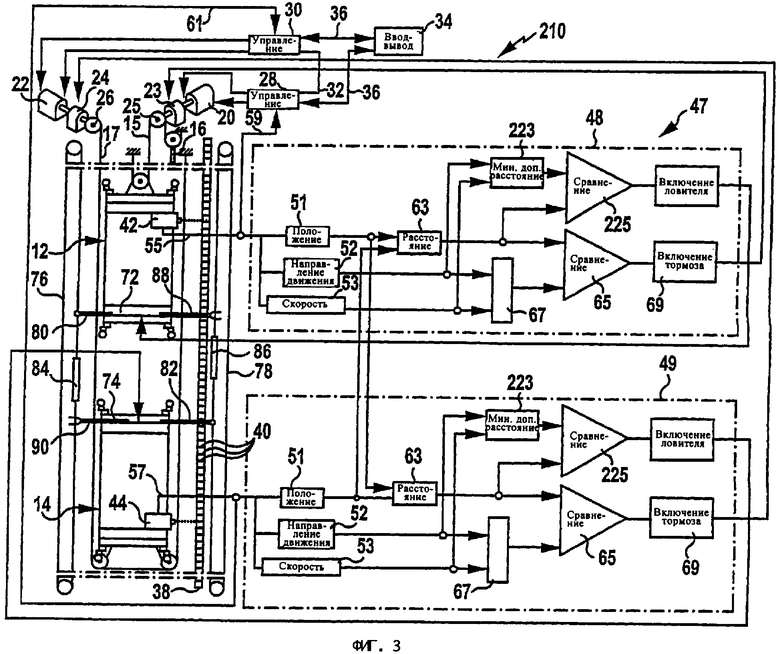
На фиг.2 представлена очень упрощенная схема предлагаемой в изобретении лифтовой установки во втором варианте выполнения, обозначенной общей позицией 110. Лифтовая установка 110 выполнена в значительной мере идентичной лифтовой установке 10, описанной выше со ссылкой на фиг.1. Поэтому идентичные элементы обозначены теми же позициями, что и на фиг.1, а описание конструкции этих элементов и выполняемых ими функций полностью соответствует приведенному выше описанию.
Лифтовая установка 110 отличается от лифтовой установки 10 лишь тем, что фактическое расстояние между обеими кабинами 12, 14 определяется не блоком определения расстояний на основании информации, предоставляемой в электронном виде устройствами 42 и 44 считывания штрихкода, а независимо от указанных устройств 42 и 44 считывания штрихкода непосредственно с помощью бесконтактных датчиков 111 и 113 расстояния, установленных на кабинах 12 и 14 сверху и снизу. Датчики 111 и 113 расстояния каждой кабины 12 и 14 соединены отдельной линией 115 передачи данных с блоком 65 сравнения соответствующего предохранительного блока 48, 49. Информация, предоставляемая устройствами 42 и 44 считывания штрихкода, используется для определения направления и скорости движения соответственно кабин 12 и 14, а расстояние между кабинами определяется независимо от определения направления и скорости с помощью датчиков 111 и 113 расстояния. Таким образом, блок 51 обработки данных местоположения можно не включать в состав предохранительных блоков 48 и 49 лифтовой установки 110. Кроме того, фактическое расстояние между двумя кабинами 12, 14 сравнивается с критическим расстоянием, зависящим от направления и скорости движения кабин 12 и 14. При необходимости предохранительный блок 48 или 49 обеспечивает переход в режим экстренной остановки, как это уже описано выше. Если скорость инициированного торможения кабин 12 и/или 14 оказывается недостаточной для гарантированного предотвращения столкновения кабин, то и в показанной на фиг.2 лифтовой установке 110 механическим путем приводится в действие по меньшей мере один ловитель, как это описано выше со ссылкой на фиг.1.
Датчики 111, 113 расстояния можно также использовать для измерения расстояний, соответственно, до нижнего и верхнего концов пути движения.
На фиг.3 показана предлагаемая в изобретении лифтовая установка в третьем варианте выполнения, обозначенная общей позицией 210. Эта система выполнена также в значительно мере идентичной лифтовой установке 10, описанной выше со ссылкой на фиг.1. Поэтому идентичные элементы показанного на фиг.3 варианта выполнения лифтовой установки обозначены также теми же позициями, что и на фиг.1, а описание конструкции этих элементов и выполняемых ими функций полностью соответствует приведенному выше описанию.
Лифтовая установка 210, показанная на фиг.3, отличается от лифтовой установки 10 лишь тем, что ловители 72, 74 соответственно кабин 12 и 14 приводятся в действие не механически с помощью прикрепленных к канатам ограничителей скорости управляющих втулок и соответствующих им поворотных рычагов, а с помощью электроники соответствующих предохранительных блоков 48, 49, приводящих в действие ловители 72 и 74 при недопустимом сближении двух кабин 12 и 14. Для этого предохранительные блоки 48 и 49 оснащены дополнительно к вычислительному блоку 67 еще одним вычислительным блоком 223, с помощью которого можно определять минимально допустимое расстояние между кабинами, которое зависит от направления и скорости движения соответствующих кабин 12, 14 и которое можно сравнить в дополнительном блоке 225 сравнения с фактическим расстоянием между двумя кабинами 12 и 14. В вычислительном блоке 223 сохраняются данные направления и скорости движения кабин, получаемые из блока 52 обработки данных направления движения кабины и блока 53 обработки данных скорости движения кабины, и на основании полученных значений вычислительный блок 223 выдает соответствующую, введенную на стадии программирования величину минимально допустимого расстояния между кабинами, которую затем можно сравнить с величиной фактического расстояния. Вычислительный блок 223 выполнен также в виде (блока) памяти для записи-считывания. Определение минимально допустимого расстояния между кабинами, зависящего от направления и скорости их движения, с помощью вычислительного блока 223 позволяет заблокировать срабатывание ловителя 72 или 74 при преднамеренном сближении обеих кабин 12 и 14 с очень небольшой скоростью, например, для их осмотра или обслуживания. Если же кабины 12 и/или 14 движутся с большей скоростью, то за счет указания, соответственно, большого минимально допустимого расстояния между кабинами в случае их недопустимого сближения можно предупредить их столкновение путем приведения в действие соответствующего ловителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛИФТОВАЯ УСТАНОВКА | 2005 |
|
RU2381981C2 |
| УСТРОЙСТВО КОНТРОЛЯ ДЛЯ ЛИФТОВОЙ УСТАНОВКИ | 2016 |
|
RU2717604C2 |
| СПОСОБ АКТИВАЦИИ ЛОВИТЕЛЯ | 2011 |
|
RU2576366C2 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ЛИФТА | 2008 |
|
RU2499760C2 |
| ПРЕДОХРАНИТЕЛЬНАЯ ЦЕПЬ В ЛИФТОВОЙ УСТАНОВКЕ | 2010 |
|
RU2543476C2 |
| СПОСОБ СОГЛАСОВАНИЯ ДВИЖЕНИЯ ГРУППЫ КАБИН ЛИФТА, ЛИФТОВАЯ УСТАНОВКА И СПОСОБ УПРАВЛЕНИЯ ГРУППОЙ КАБИН В ШАХТЕ ЛИФТА | 2007 |
|
RU2442738C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ИНФОРМАЦИИ О РАЗМЕЩЕННЫХ В ШАХТЕ ЛИФТА КОМПОНЕНТАХ ЛИФТА | 2016 |
|
RU2726816C1 |
| СПОСОБ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ЛИФТОВОЙ УСТАНОВКИ И ЛИФТОВАЯ УСТАНОВКА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2010 |
|
RU2534830C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ЭЛЕКТРОННОЙ СИСТЕМЫ БЕЗОПАСНОСТИ С ВРЕМЕННЫМИ УЧАСТНИКАМИ | 2015 |
|
RU2696645C2 |
| ПОДЪЕМНАЯ УСТАНОВКА (ВАРИАНТЫ) | 2011 |
|
RU2552387C2 |
Изобретение относится к средствам, обеспечивающим безопасность эксплуатации подъемных устройств. Предложена лифтовая установка, имеющая по меньшей мере одну шахту, в которой с возможностью перемещения вдоль общего пути движения установлены по меньшей мере две кабины и которая оснащена шахтной информационной системой для определения местоположения и скоростей кабин, связанной с электрическим предохранительным устройством. Экстренная остановка одной из кабин вызывается посредством предохранительного устройства независимо от блоков управления кабин, если расстояние от этой кабины до соседней с ней другой кабины или до конца пути движения меньше заданного критического расстояния. Предусмотрена возможность приведения в действие ловителя одной кабины, если расстояние от нее до соседней с ней другой кабины или до конца пути движения меньше заданного минимально допустимого расстояния. Блоки управления по меньшей мере всех кабин, расположенных на одном пути движения, связаны между собой, образуя в совокупности устройство группового управления. Предложенная лифтовая установка характеризуется высокой производительностью с гарантированным предупреждением столкновения кабин. 24 з.п. ф-лы, 3 ил.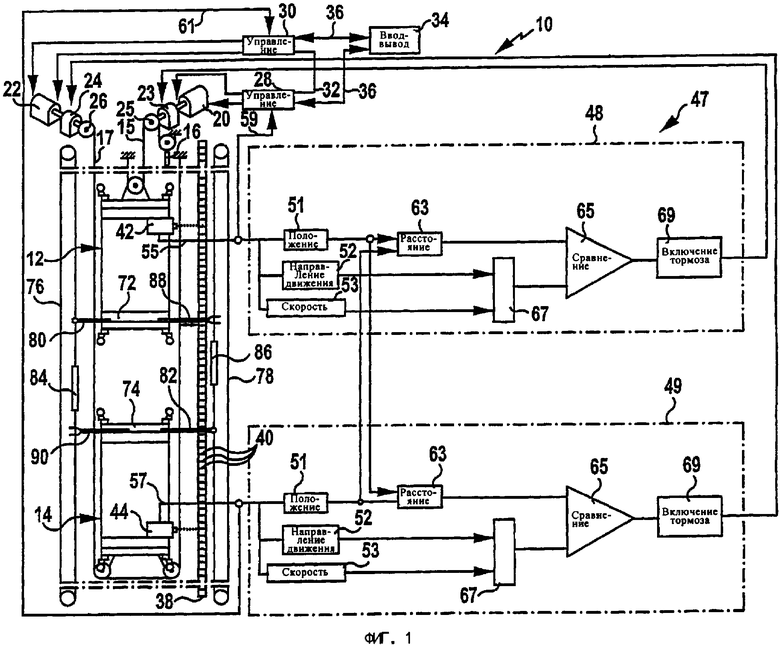
| Устройство для измерения градиента магнитного поля | 1976 |
|
SU769469A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство для группового управления лифтами | 1982 |
|
SU1089024A1 |

