Изобретение относится к устройству контроля для лифтовой установки, монтажному устройству для монтажа шахтного оборудования и способу контроля монтажной платформы.
Лифтовые установки смонтированы или монтируются в здании. Лифтовая установка состоит, в основном, из кабины, которая тяговыми органами соединена с противовесом или со второй кабиной. Посредством привода, который воздействует выборочно на тяговые органы или непосредственно на кабину или противовес, кабина, а во встречном ей направлении противовес перемещаются по, в основном, вертикальному направляющему рельсу. Лифтовая установка используется для перевозки пассажиров и грузов внутри здания по отдельным или нескольким этажам. Лифтовая установка включает в себя устройства, обеспечивающие безопасность кабины в случае отказа привода или тяговых органов. Для этого используются, как правило, тормозные устройства или ловители, которые, в случае необходимости, могут затормозить кабину на направляющих рельсах. Такие лифтовые установки собираются в здании. Это значит, что в ходовой шахте должно было установлено шахтное оборудование. Для этого нередко используются монтажные платформы. Такие системы известны.
Такой способ монтажа описан в WO 98/40305. Предварительно смонтированная кабина или ее части используется/используются в качестве монтажной платформы. Для контроля монтажной платформы используется ограничитель скорости. Монтажная платформа включает в себя ловители, которые в случае необходимости приводятся в действие ограничителем скорости.
В WO 2014/040861 раскрыто тормозное устройство для обеспечения безопасности кабины лифта во время монтажных рейсов. Таким образом, тормозное устройство монтажной платформы выборочно приводится в действие или отпускается.
В описанных системах требуется установленный в шахте исполнительный элемент или временный ограничитель скорости. Это сложно и отчасти трудно осуществимо, т.к. для этого должны быть доступны верхние зоны шахты.
Задача настоящего изобретения заключается в создании такого устройства контроля, которое было бы простым в обращении и надежным в использовании.
Описанные ниже решения позволяют оптимально выполнить, по меньшей мере, отдельные из этих требований.
Монтажная платформа, используемая для монтажа шахтного материала лифтовой установки, снабжена электромеханическими ловителями. На монтажной платформе предусмотрено устройство контроля. Оно предназначено для использования в будущей лифтовой установке и рассчитано на контроль движений кабины будущей лифтовой установки. Таким образом, монтажная платформа используется для монтажа будущей лифтовой установки. Устройство контроля рассчитана на то, чтобы в течение времени монтажа контролировать движения монтажной платформы, а по окончании монтажа – контролировать движения кабины. Устройство контроля включает в себя для этого, по меньшей мере, один сенсорный блок для регистрации параметра движения кабины и устройство обработки, которое обрабатывает зарегистрированный параметр движения и сравнивает с предельным значением или набором предельных значений. При превышении предельного значения или, по меньшей мере, одного из предельных значений включается сигнальный выход, посредством которого активируется ловитель или соответствующий тормоз. Таким образом, в рамках монтажа лифтовой установки можно уже использовать требуемые для ее эксплуатации предохранительные элементы. Это особенно предпочтительно тогда, когда в качестве монтажной платформы используется, например, пол кабины будущей лифтовой установки.
В одном варианте решения устройство контроля включает в себя стандартную контрольную программу для определения состояния устройства контроля, и устройство контроля выбирает предельное значение из заданных предельных значений в зависимости от этого состояния. Под состоянием устройства контроля следует понимать общее состояние устройства контроля в установке. Это означает, например, что устройство контроля не соединено с необходимыми системами, которые требуются для окончательной эксплуатации устройства контроля в лифтовой установке. Этим учтен тот факт, что в момент монтажа в наличии имеются не все элементы лифта. Так, отсутствуют, например, двери кабины, датчики шахтной информации или управляющие сигналы. Точно так же нередко отсутствует или имеется лишь временное подключение к источнику тока. За счет того, что устройство контроля само определяет статус или состояние лифтовой установки или устройства контроля, оно само может войти в надежный режим монтажа или сохранить его, пока отсутствуют необходимые элементы лифта.
В одном варианте заданные предельные значения включают в себя, по меньшей мере, одно монтажное предельное значение и предельное значение нормальной работы. Одним состоянием устройства контроля является монтажное состояние. Стандартная контрольная программа указывает монтажное состояние до тех пор, пока отсутствуют заданные подключаемые элементы к устройству контроля. Устройство контроля выбирает из заданных предельных значений монтажное предельное значение до тех пор, пока стандартная контрольная программа указывает монтажное состояние. Пока стандартная контрольная программа указывает монтажное состояние, устройство обработки сравнивает обработанный параметр движения с монтажным предельным значением, чтобы при превышении монтажного предельного значения включить сигнальный выход и активировать тормоз или ловитель. Таким образом, для монтажной платформы с самого начала создана минимальная безопасность, и монтажная бригада может эксплуатировать саму монтажную платформу. Выражение «по меньшей мере, одно монтажное предельное значение и предельное значение нормальной работы» означает, что может быть предусмотрен соответственно набор монтажных предельных значений и предельных значений нормальной работы. Содержащиеся в наборе значения могут быть согласованы с различными этапами монтажа и нормальной работы или с различным характером движения, таким как рывок, ускорение, путь движения или же время движения.
В одном варианте устройство контроля выполняет в монтажном состоянии функцию возврата в прежнее состояние, которая возвращает в прежнее состояние сигнальный выход и обеспечивает возврат в прежнее состояние активированного тормоза или ловителя, причем функция возврата в прежнее состояние активируется вручную или самопроизвольно, когда устройство обработки определит движение кабины вверх или не будет достигнуто монтажное предельное значение в течение заданного времени. Таким образом, после установки монтажной платформы ее можно легко снова возвратить в прежнее состояние. Так, например, при неожиданном рывке вниз устройство контроля приводит в действие ловитель. Он блокирует дальнейшее движение вниз. Ловитель выполнен обычно самоблокирующимся. Это значит, что ловитель сначала, например за счет движения вверх, должен быть разблокирован, прежде чем его можно будет вывести из зацепления. Следовательно, как только устройство контроля определит, что монтажная платформа неподвижна или сработали ловители, оно может само снова возвратиться в прежнее состояние. Таким образом, все предохранительное устройство может быть снова приведено в рабочее состояние только за счет движения вверх.
В одном варианте устройство контроля включает в себя в монтажном состоянии аварийный размыкатель, так что при не приведенном в действие аварийном размыкателе сигнальный выход включен, а тормоз или ловитель активирован. Этим можно достичь оптимальной безопасности монтажа. Монтажник может посредством монтажной платформы грузить материал и перемещать его к месту монтажа. Во время погрузки или монтажа материала аварийный размыкатель деактивирован. Это значит, что устройство контроля приводит в действие тормоз или ловитель, т.е. приводит его в состояние торможения. Монтажная платформа, тем самым, фиксирована на направляющих рельсах. Чтобы ослабить тормоз или ловитель или активировать аварийный размыкатель, следует держать нажатой педаль или включенным выключатель. Монтажник делает это активно, как только он захочет переместить монтажную платформу. Как только он отпустит педаль или выключатель, аварийный размыкатель деактивируется, и устройство контроля активирует тормоз или ловитель. При этом педаль или выключатель выполнена/выполнен преимущественно так, что она/он случайно не сработает.
Преимущественно предусмотрен временный блок питания, который питает устройство контроля в монтажном состоянии электрической энергией. Для этого блок питания в одном варианте содержит сетевой блок для подключения к предусмотренной в данной местности электрической сети тока. Таким образом, можно удовлетворить обычным для данной местности требованиям к стройплощадке или месту монтажа. При этом блок питания включает в себя, например, промежуточный накопитель, который может перекрывать кратковременные нарушения электроснабжения.
В качестве альтернативы блок питания содержит энергетический модуль, по меньшей мере, с одним накопителем электрической энергии. Он рассчитан на работу устройства контроля вместе с соответствующим тормозом или ловителем. Накопитель энергии может в случае необходимости заменяться. Таким образом, устройство контроля может эксплуатироваться, в основном, независимо от сети. В одном варианте используются накопители энергии, как в аккумуляторных ручных инструментах, например аккумуляторном шуруповерте. Они просто заряжаются и быстро заменяются.
Преимущественно энергетический модуль или накопитель электрической энергии снабжен контролем заряда, который указывает недостаточный уровень заряда. При недостижении заданного уровня заряда устройство контроля предпочтительным образом активирует тормоз или ловитель. Таким образом, монтажник имеет хороший обзор и может своевременно заменить или подзарядить накопитель энергии.
В одном варианте блок питания или энергетический модуль содержит промежуточный накопитель, который поддерживает электроснабжение устройства контроля во время замены накопителя электрической энергии. Это сокращает продолжительность перебоев в электроснабжении.
В одном варианте блок питания содержит индикаторные элементы для индикации рабочего состояния устройства контроля или для индикации скорости движения. Однако для этого требуется дополнительное соединение с устройством контроля, которое может быть реализовано, например, посредством места коммуникационной связи.
В одном варианте сенсорный блок для регистрации параметра движения включает в себя, по меньшей мере, два резервно работающих датчика ускорения, которые регистрируют ускорение кабины лифта. При этом монтажное предельное значение указывает предельное ускорение, а сигнальный выход для активирования тормоза или ловителя включается, если зарегистрированное ускорение превышает указанное предельное ускорение в течение заданного отрезка времени. В качестве альтернативы монтажное предельное значение указывает допустимую монтажную скорость, а сигнальный выход для активирования тормоза или ловителя включается, если выявленное по зарегистрированным ускорениям значение скорости превышает указанную допустимую монтажную скорость. Датчики ускорения особенно хорошо подходят, поскольку они работают независимо от окружающих условий. Они не требуют внешнего сопряжения. Они могут быть выполнены в виде неотъемлемой составной части устройства контроля. Преимущественно устройство контроля может быть установлено на монтажной платформе еще на заводе-изготовителе.
В одном варианте монтажное предельное значение скорости движения определено преимущественно около 0,3 м/с, однако максимум 0,5 м/с. В качестве альтернативы или дополнительно монтажное предельное значение, например в качестве дополнительного монтажного предельного значения предельного ускорения, определено 9,81 м/с2, что соответствует максимум ускорению Земли. Преимущественно монтажное предельное значение установлено, однако, максимум в 6,0 м/с2. Дополнительно к этому монтажное предельное значение может предусматривать также взвешенное по времени срабатывание. Как только это ускорение будет зарегистрировано дольше заданного отрезка времени, например 50 мс, включается сигнальный выход для активирования тормоза или ловителя. Образование предельного значения учитывает при этом преимущественно характеристику средств движения, которые используются для движения монтажной платформы. Типичными средствами движения являются канатное или цепное тяговое устройство или другие подъемные средства. Согласно правилам безопасности, максимальная скорость при монтажных рейсах должна составлять 0,5 м/с, или устройство контроля должно активировать тормоз или ловитель самое позднее при скорости 0,5 м/с. Монтажное предельное значение обеспечивает достаточный интервал безопасности до этой допустимой правилами безопасности скорости. Правила безопасности могут быть различными в разных странах. В соответствии с этим контролируемые предельные значения могут быть определены по-разному.
В качестве альтернативы или дополнительно монтажное предельное значение включает в себя взвешенную по времени скорость движения. Это значит, что, например, при превышении скорости движения 0,2 м/с в течение длительного времени, а это может происходить, например, тогда, когда монтажная платформа вследствие перегрузки скользит вниз слишком быстро, включается сигнальный выход для активирования тормоза или ловителя.
В одном альтернативном или дополнительном варианте другим состоянием устройства контроля является нормальное состояние, а стандартная контрольная программа указывает нормальное состояние, как только заданные подключаемые элементы будут подключены к устройству контроля или будут находиться в рабочей готовности. В соответствии с этим устройство контроля выбирает из заданных предельных значений предельное значение нормальной работы, как только стандартная контрольная программа укажет нормальное состояние, а устройство обработки сравнивает обработанный параметр движения с предельным значением нормальной работы, чтобы при превышении предельного значения нормальной работы включить сигнальный выход и активировать тормоз или ловитель. Таким образом, устройство контроля может быть плавно приведено в режим нормальной работы, который обеспечивает нормальную работу устройства контроля. Обычно этот этап осуществляется тогда, когда монтажная платформа выполнена с деталями кабины, такими как корпус кабины, стенки, двери, крыша и необходимыми элементами управления, а лифтовая установка снабжена приводными средствами, тяговыми канатами и устройством управления. Начиная с момента нормального состояния, устройство контроля инициирует работу лифтовой установки только тогда, когда подключенные элементы указывают состояние, идентифицируемое сенсорным блоком устройства контроля.
Переключение с монтажного состояния на нормальное состояние связано с дополнительными условиями. Так, например, может потребоваться электронное подтверждение произошедшей приемки кабины с проверкой на качество.
В одном варианте устройство обработки обрабатывает в нормальном состоянии зарегистрированные параметры движения с учетом заданных подключаемых элементов. В одном варианте заданные подключаемые элементы содержат, по меньшей мере, один датчик скорости, в частности спидометр, для регистрации скорости движения или датчик пути для регистрации пройденных путевых единиц или систему определения положения. Для надежного контроля движений лифта в нормальном режиме наряду с датчиками ускорения используется, как правило, по меньшей мере, один дополнительный сигнал движения. Этот дополнительный сигнал движения используется для взаимной проверки на достоверность и для более точной оценки процесса движения. Датчики скорости и пути, например в виде инкрементального энкодера, приводятся в действие, например, огибными или направляющими роликами. В нормальном состоянии устройство обработки использует, тем самым, алгоритмы расчет, которые рассчитывают между собой все зарегистрированные параметры движения, чтобы достичь так называемого верифицированного или надежного параметра движения. На этапе монтажа лифтовой установки эти приборы, как правило, еще отсутствуют, и соответствующие гнезда в устройстве контроля не заняты. Поэтому отсутствие этого прибора или этих приборов можно использовать в качестве косвенного доказательства того, что лифтовая установка еще окончательно не смонтирована и что она поэтому может эксплуатироваться только в режиме монтажа. Устройство обработки может, тем самым, использовать в монтажном состоянии другие алгоритмы расчета, которые определены с учетом имеющихся в монтажном состоянии параметров движения. Таким образом, можно контролировать специфические, относящиеся к монтажу параметры движения. Это обеспечивает, следовательно, надежное решение, поскольку в монтажном состоянии неизбежно возможен, тем самым, режим наименьших скоростей движения, пока отсутствуют дополнительный сигнал движения или другие релевантные подключаемые элементы.
В одном дополнительном или альтернативном варианте заданные подключаемые элементы содержат присоединение к устройству управления лифтом, предохранительному контуру или источнику электроснабжения. В нормальном режиме устройство управления лифтом и устройство контроля нередко обмениваются между собой статусной информацией. Это может быть информация об обслуживании, эксплуатационная информация и т.д. Такой информацией можно обмениваться, например, через шинное соединение, такое как CAN-шина. С другой стороны, устройство контроля, как правило, включено в предохранительный контур лифтовой установки. Устройство контроля размыкает, например, этот предохранительный контур, если оно определит неконтролируемое движение кабины, или, разумеется, тогда, когда срабатывает ловитель. Прерывание предохранительного контура вызывает остановку лифтового привода. Электроснабжение происходит в нормальном режиме, как правило, из центрального источника электроснабжения лифтовой установки. Отсутствие одного или нескольких из этих подключаемых элементов может использоваться также в качестве косвенного доказательства того, что лифтовая установка еще окончательно не смонтирована и что она поэтому может эксплуатироваться только в режиме монтажа.
Устройство контроля может обнаруживать отсутствие подключаемого элемента, например, по тому, что отсутствует сигнал обнаружения подключаемого элемента, эталонный резистор, перекрыты контакты монтажным штепселем или головкой мостика, отсутствует, например, сигнал массы, отраженный сигнал считывателя кода, нет ответа или дается неправильный ответ на запрос устройства контроля через шинное соединение, не сработал выключатель, приводимый в действие подключаемым элементом, или отсутствуют другие характеристические значения подключаемого элемента.
В одном варианте гнёзда при изготовлении могут быть снабжены головками перемычек, которые в устройстве контроля обеспечивают простое обнаружение его состояния.
Преимущественно способ монтажа лифтовой установки предусматривает, что в шахте в целях монтажа устанавливается передвижная монтажная платформа. Это осуществляется преимущественно сразу же после монтажа самых нижних направляющих рельсов в шахте. Монтажная платформа может содержать части будущего пола кабины, однако может быть также специальным помостом. На монтажной платформе размещаются устройство контроля и, по меньшей мере, один тормоз или ловитель, которые электрически соединяются между собой. Устройство контроля и тормоз или ловитель могут быть размещены на монтажной платформе еще до ее монтажа. Это целесообразно, прежде всего, тогда, когда в качестве монтажной платформы используется будущий пол кабины. Устройство контроля подключается к временному, как правило, источнику электроснабжения. Устройство контроля, в основном, самостоятельно обнаруживает, что отсутствуют или не подключены важные подключаемые элементы, такие как устройство управления лифтом, предохранительный контур или дополнительные датчики движения. Если такие подключаемые элементы отсутствуют, то устройство контроля находится в монтажном состоянии и в этом состоянии допускает лишь ограниченные небольшие или медленные движения. Таким образом, монтажные работы могут проводиться безопасно.
На дополнительном этапе на монтажной платформе размещается аварийный размыкатель, который соединяется с устройством контроля. Таким образом, безопасность монтажной платформы всегда обеспечивается тормозом или ловителем, если не происходит намеренного приведения в действие аварийного размыкателя.
Далее устройство контроля самопроизвольно переключается в нормальное состояние, как только будут подключены важные или считающиеся важными подключаемые элементы. Таким образом, обеспечен простой и надежный переход на этап нормальной работы. Для эксплуатации лифтовой установки могут использоваться, в частности, те же компоненты, что уже использовались для обеспечения монтажного состояния. Это особенно предпочтительно, если, как уже сказано, пол кабины оснащен требуемыми компонентами еще на заводе-изготовителе.
Ниже изобретение поясняется на примерах его осуществления в связи со схематичными чертежами, на которых изображают:
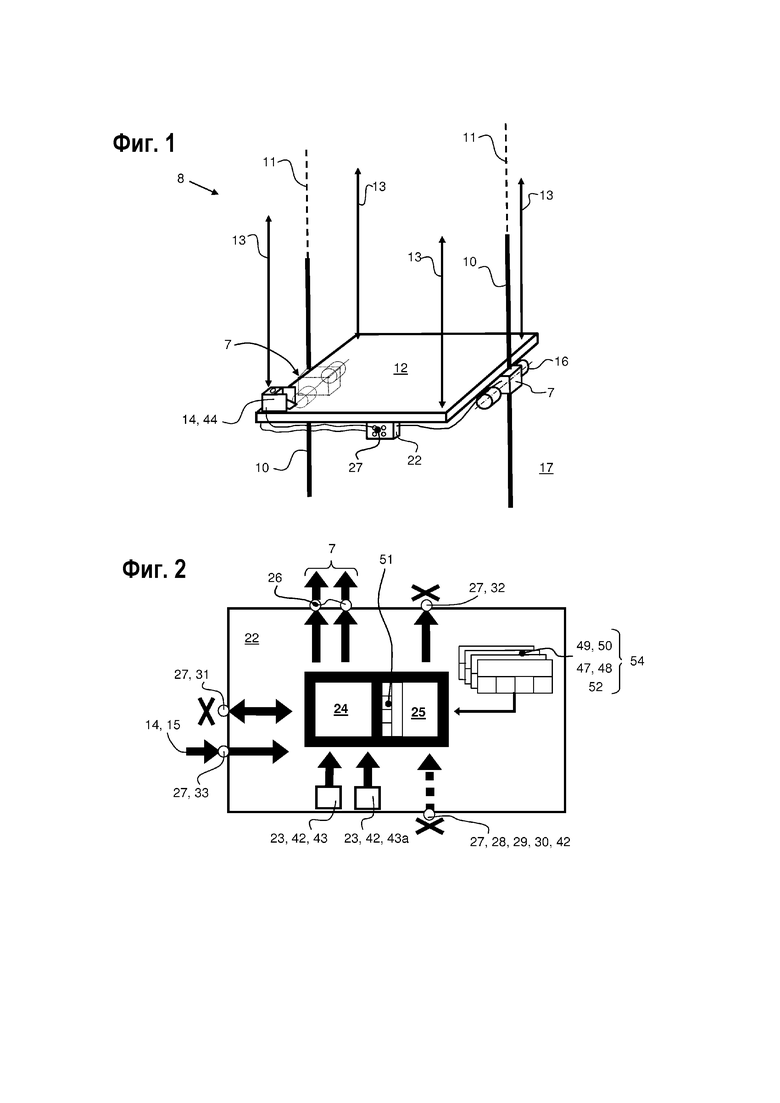
фиг. 1 - монтажное устройство с размещенным устройством контроля;
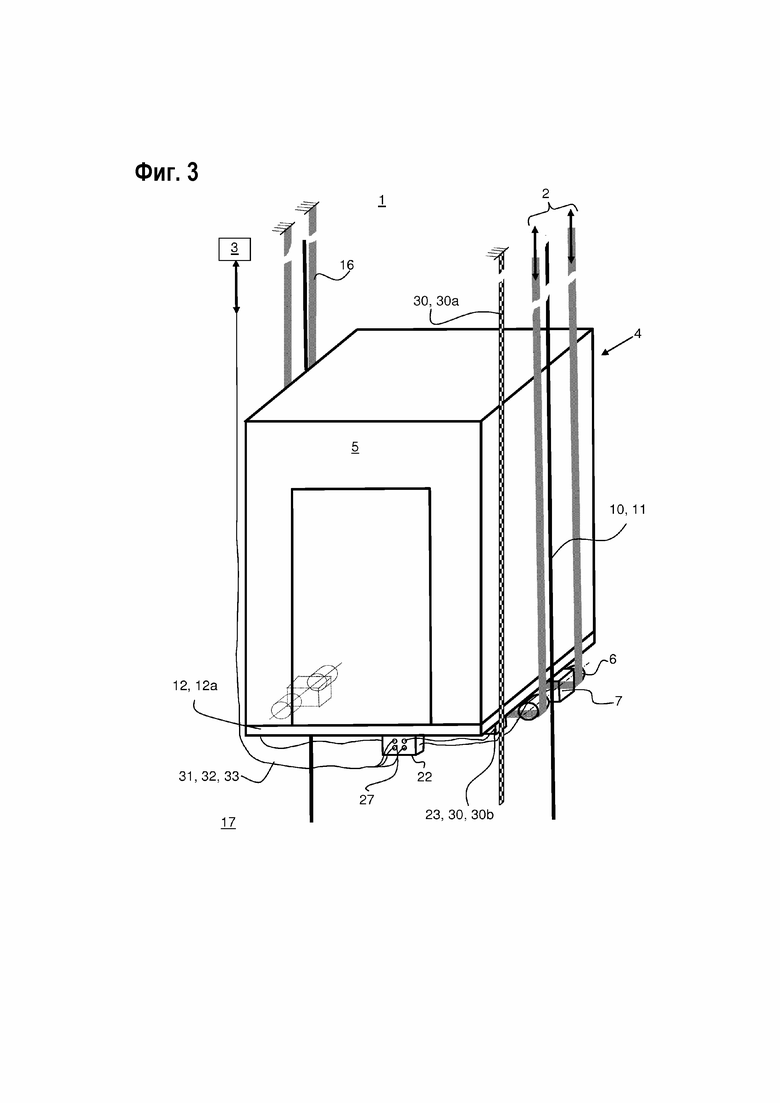
фиг. 2 - устройство контроля в монтажном состоянии;
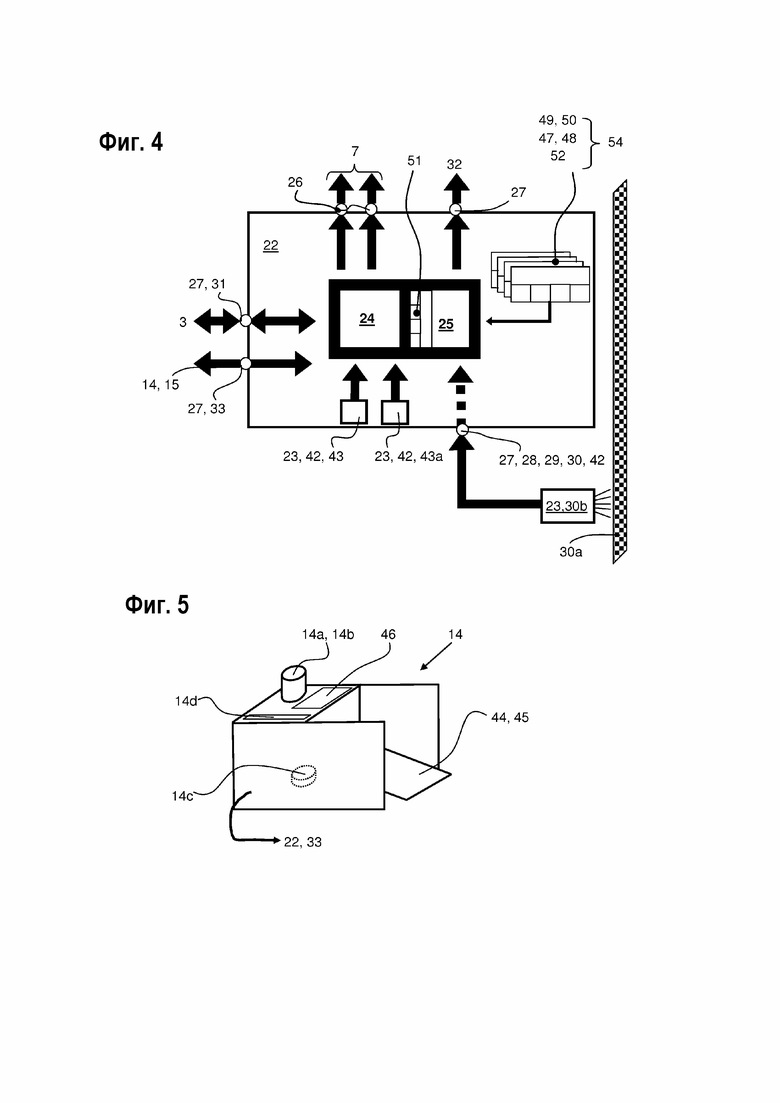
фиг. 3 - лифтовая установка с размещенным устройством контроля;
фиг. 4 - устройство контроля в нормальном состоянии;
фиг. 5 - блок питания с встроенным аварийным размыкателем.
На чертежах одинаковые детали обозначены одинаковыми ссылочными позициями.
Лифтовая установка 1, схематично изображенная на фиг. 3 в смонтированном состоянии, содержит кабину 4 для перевозки пассажиров или грузов. Кабина включает в себя, в основном, пол 12а и корпус 5 со стенками, дверями, потолком и другими необходимыми для работы кабины устройствами. Кабина 4 перемещается вдоль направляющих рельсов 10, 11 и в данном примере подвешена через несущие ролики 6 на тяговом органе 16. Тяговые органы 16 объединены в привод 2, который может перемещать кабину. Посредством устройства 3 управления лифтом приводом 2 можно управлять или можно регулировать его. Кабина 4 располагает системой 30 определения положения. Устройство 3 управления лифтом использует информацию о положении и движении от системы 30 определения положения для управления приводом. В примере на фиг. 3 система 30 определения положения включает в себя кодированную ленту 30а, которая проложена вдоль пути движения кабины 4, и расположенный на кабине 4 считыватель 30b кода, который может считывать код ленты 30а и преобразовывать в путевые единицы или позиционные данные.
Кабина 4 включает в себя далее тормоз или ловитель 7, который в случае необходимости может быть приведен в контакт с направляющим рельсом 10, 11, чтобы затормозить и зафиксировать кабину. Для этого использована пара тормозов или ловителей 7, которые могут взаимодействовать с расположенными с обеих сторон кабины 4 направляющими рельсами 10, 11. Тормозами или ловителями 7 управляет или регулирует их устройство 22 контроля. Оно располагает сенсорным блоком 23 для регистрации параметров движения кабины 4. Для этого могут использоваться данные системы 30 определения положения или же внутренние датчики. Для безопасности желательно, чтобы различные датчики регистрировали данные движения, в результате чего могут генерироваться надежные данные. Разумеется, устройство 22 контроля соединено с тормозами или ловителями 7 для приведения их в действие, т.е. для торможения кабины или для ее отпускания. Устройство 22 контроля подключено к источнику 33 напряжения и, как правило, посредством коммуникационного интерфейса 31, такого как CAN-шина, соединено с устройством 3 управления лифтом. Кроме того, устройство 22 контроля включено, как правило, в предохранительный контур 32. С приведением в действие тормозов или ловителей 7 управление предохранительным контуром лифтовой установки происходит, как правило, таким образом, что ее привод останавливается.
При монтаже лифтовой установки 1 многие ее узлы устанавливаются в процессе монтажа в шахте 17 по заданному плану. Для этого, как показано на фиг. 1, нередко используется монтажная платформа 12, для чего в зоне нижнего конца шахты устанавливаются первые направляющие рельсы 10. На этих первых направляющих рельсах 10 устанавливается монтажная платформа 12. Она может подниматься и опускаться тяговым органом 13, который установлен или закреплен в верхней части шахты 17. Монтажная платформа 12 перемещается по первым направляющим рельсам 10. Посредством монтажной платформы 12 могут быть подняты дополнительные направляющие рельсы 11 и установлены с нее, так что шахта 17 может быть оборудована снизу вверх. Нередко, как видно на фиг. 1, в качестве монтажной платформы 12 используется будущий пол 12а кабины, или используются ее части. На монтажной платформе 12 уже предварительно смонтированы детали, такие как будущие несущие ролики 6. Точно так же на монтажной платформе 12 размещены тормоза или ловители 7, которые служат во взаимодействии с направляющими рельсами 10, 11 в качестве остановочных тормозов, чтобы удержать монтажную платформу от падения.
На монтажной платформе 12 размещено далее устройство 22 контроля. Оно предназначено для использования в будущей лифтовой установке 1 и рассчитано таким образом, чтобы контролировать движения кабины 4 будущей лифтовой установки 1. Устройство 22 контроля рассчитано с возможностью контролировать движения монтажной платформы 12 в течение времени монтажа и движения кабины 4 по окончании монтажа. Как видно на фиг. 1, в момент монтажа, разумеется, отсутствует, например, устройство 3 управления лифтом или штатное электроснабжение. Также отсутствуют, как правило, предохранительный контур и кодированная лента системы 30 определения положения. Соответствующие гнезда 27 в устройстве 22 контроля, тем самым, не заняты, и вместо штатного электроснабжения в примере на фиг. 1 предусмотрен блок 14 питания, который питает устройство 22 контроля и соответствующие тормоза или ловители 7 требуемой энергией, преимущественно электрической энергией.
Устройство 22 контроля обнаруживает, что отсутствуют релевантные подключаемые элементы 27. Устройство 22 контроля обнаруживает это, например, по тому, что отсутствуют сигнал обнаружения подключаемого элемента, эталонный резистор, контакты перекрыты монтажными штепселями, отсутствуют, например, сигнал массы, отраженный сигнал считывателя кода, не сработал выключатель, приводимый в действие подключаемым элементом, или отсутствуют другие характеристические значения подключаемого элемента. Это примеры, которые могут быть оформлены или же дополнены специалистом. В другом примере отсутствие подключения к устройству 3 управления лифтом может быть обнаружено по тому, что нет ответа или дается неправильный ответ на запрос устройства 22 контроля через шинное соединение или соответствующий коммуникационный интерфейс 31. Пока эти подключаемые элементы или, по меньшей мере, один подбор заданных подключаемых элементов отсутствуют, устройство 22 контроля остается в монтажном состоянии 49, как это поясняется в связи с фиг. 2.
Устройство 22 контроля содержит сенсорный блок 23 для регистрации параметра движения кабины. В варианте на фиг. 2 – это два резервно работающих датчика 43, 43а ускорения. Оба датчика 43, 43а ускорения регистрируют параметры движения монтажной платформы 12 в виде ускорений. Оба датчика 43, 43а ускорения являются составной частью устройства 22 контроля. Устройство 22 контроля через сигнальные выходы 26 с тормозами или ловителями 7. Посредством блока 14 питания обеспечивается, по меньшей мере, временное электроснабжение. Остальные подключаемые элементы 27, в частности устройство 3 управления лифтом, предохранительный контур 32 и в данном случае также внешний датчик для регистрации движения кабины, такой как датчик 28 скорости, датчик 29 пути или кодированная лента 30а системы 30 определения положения, отсутствуют. Расположенная в устройстве 22 контроля стандартная контрольная программа 25 обнаруживает отсутствие отдельных или всех этих подключаемых элементов 27 и переводит устройство 22 контроля или его устройство 24 обработки в монтажное состояние 49 или оставляет устройство 22 контроля в монтажном состоянии. Это значит, что устройству 24 обработки задается алгоритм обработки, который относится к обработке обоих датчиков 43, 43а ускорения. В соответствии с монтажным предельным значением 50 устанавливается, по меньшей мере, одно предельное значение 51, которое лимитирует параметры движения монтажной платформы 12. Нередко вместо отдельного предельного значения 51 используется набор предельных значений, как это пояснялось выше. Если ниже речь идет о предельном значении 51, то под ним подразумевается также набор предельных значений. Соответствующий алгоритм обработки, как и соответствующее монтажное предельное значение 50, хранятся в наборе 54 параметров, отнесенном к монтажному состоянию 49. Набор 54 параметров включает в себя, тем самым, заданные предельные значения 52, отнесенные к соответствующему состоянию. Монтажное предельное значение 50 или монтажные предельные значения 50 включают в себя допустимые скорости движения и допустимые значения ускорения, как и возможные интервалы времени, в которые не должны быть превышены определенные значения ускорения или скорости движения. Как пояснялось выше, монтажные предельные значения 50 рассчитаны на потребности монтажа. В монтажном состоянии 49 устройство 22 контроля отбирает предельное значение 51 или предельные значения 51 из заданных предельных значений 52 соответствующего набора 54 параметров.
Устройство 24 обработки сравнивает полученные по сигналам обоих датчиков 43, 43а ускорения параметры движения, в частности скорость движения и текущее состояние ускорения, с монтажными предельными значениями 50. Как только соответствующие монтажные предельные значения будут превышены, включается сигнальный выход 26 или включаются сигнальные выходы 26, и срабатывают тормоза или ловители 7. При этом следует отметить, что тормоза или ловители 7 сконструированы, как правило, таким образом, что они под током разомкнуты, а при обесточивании самопроизвольно срабатывают, т.е. смыкаются. Включение сигнального выхода 26 означает, тем самым, то, что он включается обесточенным.
На монтажной платформе 12 предусмотрен блок 14 питания, который питает устройство 22 контроля и соответствующие тормоза или ловители 7 требуемой энергией. Такой блок 14 питания более подробно поясняется на фиг. 5.
Блок 14 питания содержит энергетический модуль 14а в виде повторно заряжаемого накопителя 14b электрической энергии. Он рассчитан на работу устройства 22 контроля вместе с соответствующим тормозом или ловителем 7. Накопитель 14b энергии может быть в случае необходимости заменен. Накопителем 14b энергии может быть аккумулятор. При этом он заряжается в соответствующем зарядном устройстве. Разумеется, возможно также подключение к имеющемуся на стройке источнику электропитания.
В варианте на фиг. 5 блок 14 питания снабжен контролем 14d зарядки. Таким образом, можно оценить уровень заряда. В то же время при уровне заряда ниже заданного может быть активирован тормоз или ловитель. Блок 14 питания содержит факультативный промежуточный накопитель 14с, который поддерживает энергоснабжение устройства контроля во время замены накопителя электрической энергии. Изображенный на фиг. 5 блок 14 питания содержит опциональные индикаторные элементы 46 для индикации рабочего состояния устройства контроля. В отдельных случаях может осуществляться также индикация текущей скорости движения. В крайнем случае для этого используется подключение коммуникационного интерфейса 31 устройства 22 контроля.
В качестве одной особенности блок 14 питания содержит на фиг. 5 так называемый аварийный размыкатель 44. Этот аварийный размыкатель 44 вызывает приведение в действие тормоза или ловителя 7, когда аварийный размыкатель не приведен в действие. Для этого в блоке 14 питания расположена педаль 45. Монтажник нажимает на педаль 45 ногой. Если педаль 45 не нажата, то устройство 22 контроля приводит в действие тормоз или ловитель 7. Таким образом, монтажная платформа 12, как правило, когда она не находится в режиме движения, фиксирована тормозом или ловителем 7. Это значит, что она тогда неподвижна для проведения монтажных работ. Если монтажная платформа 12 должна двигаться, то монтажник нажимает на педаль, в результате чего устройство 22 контроля отпускает тормоз или ловитель 7. За счет тягового органа 13 или соответствующего подъемного механизма монтажная платформа тогда может перемещаться.
Если описанным образом шахта 17 смонтирована, то комплектуется также кабина, как показано на фиг. 3. Это значит, что корпус 5 кабины устанавливается на монтажной платформе 12, которая за счет этого становится полом 12а кабины. Вместе с комплектованием к устройству 22 контроля подключаются отсутствующие подключаемые элементы 27, в частности устройство 3 управления лифтом, предохранительный контур 32 и в данном случае также система 30 определения положения. Временный блок 14 питания снимается, и проводом 33 к штатной сети напряжения лифтовой установки подключается устройство 22 контроля.
Содержащаяся в устройстве 22 контроля стандартная контрольная программа 25 обнаруживает, что требуемые подключаемые элементы подключены, и приводит устройство 22 контроля или его устройство 24 обработки в нормальное состояние 47. Это означает, что устройству 24 обработки задается алгоритм обработки или расчета, который относится к обработке обоих датчиков 43, 43а ускорения и подключенной системе 30 определения положения, и что предельное значение 51 или набор предельных значений, которые лимитируют параметры движения кабины 4, устанавливаются предельными значениями 48 нормальной работы. Соответствующий алгоритм обработки, как и соответствующие заданные предельные значения 52 или соответствующие предельные значения 48 нормальной работы, хранятся в наборе 54 параметров, отнесенном к нормальному состоянию 47. Предельные значения 48 нормальной работы включают в себя максимально допустимые скорости движения, в крайнем случае с учетом положения кабины 4 в шахте 17, и допустимые значения ускорения, как и возможные интервалы времени, в которые не должны быть превышены определенные значения ускорения или другие параметры движения. В наборе 54 параметров могут храниться несколько нормальных состояний 47, которые выбираются тогда, например, для сервисного или обслуживающего рейса или для рейсов в случае пожара и т.п.
Описанное выполнение можно изменять. Так, вместо описанной системы 30 определения положения могут использоваться другие датчики для регистрации параметров движения. Так, например, может использоваться инкрементальный энкодер, приводимый, например, несущим роликом, или датчик скорости, приводимый, например, направляющим роликом, или, разумеется, также акустический прибор для регистрации движений. В зависимости от используемых подключаемых элементов 27 и датчиков в монтажном состоянии 49 использованы соответственно другие стандартные программы обработки.
Также изображенный блок 14 питания можно варьировать. Так, аварийный размыкатель может быть реализован отдельно от блока питания.
Различные выводы для подключения подключаемых элементов 27 необязательно должны быть отдельными гнездами. Могут использоваться присоединительные планки с гнездами, оптические интерфейсы или беспроводные присоединения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА ЗАЩИТЫ ЛИФТА ОТ ПРЕВЫШЕНИЯ УСКОРЕНИЯ И ПРЕВЫШЕНИЯ СКОРОСТИ | 2009 |
|
RU2491224C2 |
| Система управления грузопассажирским лифтом | 2022 |
|
RU2791781C1 |
| СИСТЕМА ОБНАРУЖЕНИЯ И ОБРАБОТКИ ПРЕВЫШЕНИЯ УСКОРЕНИЯ И ПРЕВЫШЕНИЯ СКОРОСТИ | 2009 |
|
RU2487074C2 |
| СПОСОБ АКТИВАЦИИ ЛОВИТЕЛЯ | 2011 |
|
RU2576366C2 |
| СПОСОБ КОНТРОЛЯ ТОРМОЗНОЙ СИСТЕМЫ В ЛИФТОВОЙ УСТАНОВКЕ И СООТВЕТСТВУЮЩЕЕ УСТРОЙСТВО ВИДЕОКОНТРОЛЯ ЗА ТОРМОЗНОЙ СИСТЕМОЙ ЛИФТОВОЙ УСТАНОВКИ | 2009 |
|
RU2496707C2 |
| СПОСОБ КОНТРОЛЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ПОДЪЕМНОГО УСТРОЙСТВА | 2015 |
|
RU2618862C2 |
| ЛИФТОВАЯ УСТАНОВКА, СОДЕРЖАЩАЯ КАБИНУ И ПРОТИВОВЕС | 2011 |
|
RU2583829C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ЛОВИТЕЛЕЙ КАБИНЫ ЛИФТА | 2006 |
|
RU2398727C2 |
| СПОСОБ УПРАВЛЕНИЯ ТОРМОЖЕНИЕМ ЛИФТА | 2008 |
|
RU2499760C2 |
| ЛИФТОВАЯ УСТАНОВКА | 2005 |
|
RU2381981C2 |
Изобретение относится к устройству (22) контроля для лифтовой установки, монтажному устройству для монтажа шахтного оборудования и способу контроля монтажной платформы. Устройство (22) контроля контролирует движения кабины лифта и содержит сенсорный блок (23) для регистрации параметра (42) движения и по меньшей мере одно устройство (24) обработки, которое обрабатывает зарегистрированный параметр (42) движения и сравнивает его с предельным значением. При превышении предельного значения включается сигнальный выход (26) и тем самым активируется тормоз или ловитель (7). При этом устройство (22) контроля выбирает предельное значение из заданных предельных значений (52) в зависимости от состояния устройства (22) контроля. Заданные предельные значения (52) включают в себя по меньшей мере одно предельное значение (48) нормальной работы, а устройство (22) контроля указывает нормальное состояние (47), если заданные подключаемые элементы (27) подключены к устройству (22) контроля. Устройство (22) контроля содержит контрольную стандартную программу (25) для установления состояния устройства (22) контроля и выбирает предельное значение из заданных предельных значений (52) в зависимости от этого состояния. Изобретения обеспечивают упрощение эксплуатации и надежность использования. 3 н. и 12 з.п. ф-лы, 5 ил.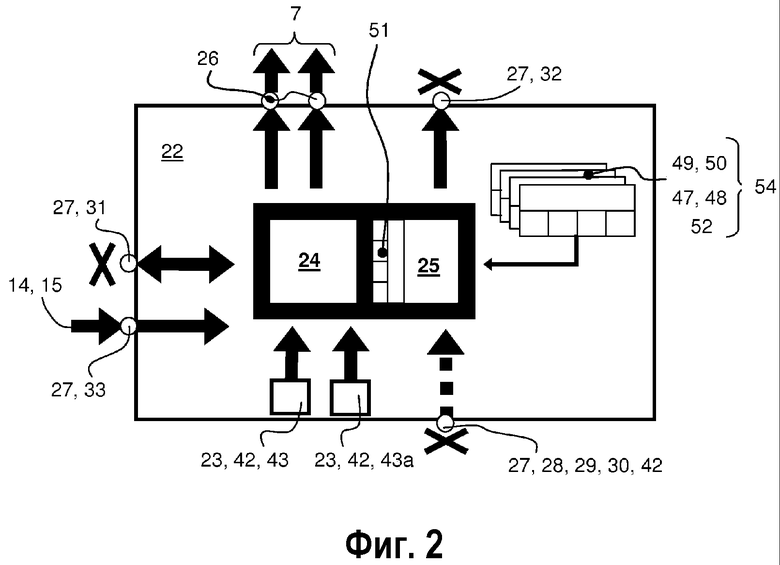
1. Устройство (22) контроля для лифтовой установки (1) с кабиной (4) для контроля движения кабины (4), содержащее сенсорный блок (23) для регистрации параметра (42) движения, устройство (24) обработки, выполненное с возможностью обработки зарегистрированного параметра (42) движения, сравнения с предельным значением (51) и при превышении предельного значения (51) включения сигнального выхода (26) для активирования тормоза или ловителя (7), причем устройство (22) контроля выполнено с возможностью выбора предельного значения (51) из заданных предельных значений (52) в зависимости от состояния устройства (22) контроля, отличающееся тем, что заданные предельные значения (52) включают в себя по меньшей мере одно предельное значение (48) нормальной работы, а устройство (22) контроля указывает нормальное состояние (47), если заданные подключаемые элементы (27) подключены к устройству (22) контроля, в частности находятся в эксплуатационной готовности, и устройство (22) контроля выполнено с возможностью выбора предельного значения (48) нормальной работы из заданных предельных значений (52), если указано нормальное состояние (47), и устройство (24) обработки выполнено с возможностью сравнения обработанного параметра (42) движения с предельным значением (48) нормальной работы и/или заданные предельные значения (52) включают в себя монтажное предельное значение (50), устройство (22) контроля указывает нормальное состояние (47), если заданные подключаемые элементы (27) к устройству (22) контроля отсутствуют, и устройство (22) контроля выполнено с возможностью выбора монтажного предельного значения (50) из заданных предельных значений (52), при этом устройство (24) обработки выполнено с возможностью сравнения обработанного параметра (42) движения с монтажным предельным значением (50).
2. Устройство по п. 1, отличающееся тем, что оно содержит стандартную контрольную программу (25) для определения состояния устройства (22) контроля, и стандартная контрольная программа (25) указывает нормальное состояние (47), если заданные подключаемые элементы (27) подключены к устройству (22) контроля, в частности в эксплуатационной готовности, или стандартная контрольная программа (25) указывает монтажное состояние (49), если заданные подключаемые элементы (27) к устройству (22) контроля отсутствуют.
3. Устройство по п. 1 или 2, отличающееся тем, что в монтажном состоянии (49) оно выполняет функцию возврата в прежнее состояние, которая возвращает в прежнее состояние сигнальный выход (26) и обеспечивает возврат в прежнее состояние активированного тормоза или ловителя (7), причем функция возврата в прежнее состояние может быть активирована вручную или самопроизвольно, если устройство (24) обработки установит движение кабины (4) вверх или в течение заданного времени не будет достигнуто монтажное предельное значение (50).
4. Устройство по любому из пп. 1-3, отличающееся тем, что в монтажном состоянии (49) оно содержит аварийный размыкатель (44), так что при не приведенном в действие аварийном размыкателе (44) включен сигнальный выход (26) и активирован тормоз или ловитель (7).
5. Устройство по любому из пп. 1-4, отличающееся тем, что сенсорный блок (23) для регистрации параметра (42) движения содержит по меньшей мере два резервно работающих датчика (43, 43а) ускорения, выполненных с возможностью регистрации ускорения кабины (4), причем монтажное предельное значение (50) указывает предельное ускорение, а сигнальный выход (26) для активирования тормоза или ловителя (7) включается, если зарегистрированное ускорение превышает указанное предельное ускорение, и/или монтажное предельное значение (50) указывает предельную монтажную скорость, а сигнальный выход (26) для активирования тормоза или ловителя (7) включается, если полученное из зарегистрированных ускорений значение скорости превышает указанную предельную монтажную скорость.
6. Устройство по любому из предыдущих пп. 1-5, отличающееся тем, что монтажное предельное значение (50) скорости движения соответствует максимально 0,5 м/с, однако преимущественно 0,3 м/с, и/или монтажное предельное значение (50) предельного ускорения соответствует максимально 9,81 м/с2, однако преимущественно 6,0 м/с2, и/или монтажное предельное значение (50) соответствует взвешенному по времени ускорению или скорости движения, причем заданное значение ускорения или скорости движения может быть превышено самое большее в течение заданного отрезка времени.
7. Устройство по любому из пп. 1-6, отличающееся тем, что устройство (24) обработки в нормальном состоянии (47) выполнено с возможностью обработки зарегистрированных параметров (42) движения с учетом заданных подключаемых элементов (27).
8. Устройство по любому из пп. 1-7, отличающееся тем, что заданные подключаемые элементы (27) содержат по меньшей мере один датчик (28) скорости для регистрации скорости движения, или датчик (29) пути для регистрации пройденных путевых единиц, или систему (30) определения положения или подключение к устройству (3) управления лифтом, предохранительному контуру (32) или источнику (33) электропитания.
9. Монтажное устройство (8) для монтажа шахтного оборудования лифтовой установки (1), содержащее выполненную с возможностью перемещения монтажную платформу (12), расположенное на монтажной платформе (12) устройство (22) контроля по любому из пп. 1-8 и закрепленный на монтажной платформе (12) тормоз или ловитель (7), который для управления соединен с устройством (22) контроля и блоком (14) питания для снабжения устройства (22) контроля электрической энергией.
10. Устройство по п. 9, причем блок (14) питания содержит энергетический модуль (14а) по меньшей мере с одним накопителем (14b) электрической энергии, причем накопитель (14b) энергии выполнен с возможностью эксплуатации устройства (22) контроля вместе с соответствующим тормозом или ловителем (7) и причем накопитель (14b) электрической энергии, в случае необходимости, может быть заменен или заряжен, или блок питания содержит сетевой блок для подключения к предусмотренной в данной местности электрической сети тока.
11. Устройство по п. 10, причем блок (14) питания, энергетический модуль (14а) или накопитель (14b) электрической энергии снабжен контролем (14d) заряда, который указывает недостаточный уровень заряда накопителя энергии или энергетического модуля, причем при недостижении заданного уровня заряда устройство (22) контроля выполнено с возможностью активирования тормоза или ловителя (7).
12. Устройство по п. 11, причем блок (14) питания или энергетический модуль (14а) содержит промежуточный накопитель (14с), выполненный с возможностью поддержания энергоснабжения устройства (22) контроля во время замены накопителя (14b) электрической энергии.
13. Устройство по любому из пп. 10-12, причем блок (14) питания содержит индикаторные элементы (46) для индикации рабочего состояния устройства (22) контроля и/или для индикации скорости движения и/или блок питания содержит коммутационные приборы для ручного возврата в прежнее состояние и/или приведения в действие аварийного размыкателя (44).
14. Способ монтажа лифтовой установки посредством устройства контроля по любому из пп. 1-8, включающий в себя следующие этапы:
- монтаж перемещаемой монтажной платформы (12),
- расположение устройства (22) контроля и по меньшей мере одного тормоза или ловителя (7) на монтажной платформе (12) и подключение тормоза или ловителя (7) к устройству (22) контроля,
- подключение устройства (22) контроля к блоку (14) питания для снабжения устройства (22) контроля электрической энергией.
15. Способ по п. 14, причем с устройством (22) контроля соединяют аварийный размыкатель (44) и тормоз или ловитель (7) активируют, если аварийный размыкатель (44) не приведен в действие.
| Дорожная спиртовая кухня | 1918 |
|
SU98A1 |
| US 20110186385 A1, 04.08.2011 | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство для закрепления лыж на раме мотоциклов и велосипедов взамен переднего колеса | 1924 |
|
SU2015A1 |
| КОНТРОЛЬ СОСТОЯНИЯ ЛИФТА | 2005 |
|
RU2369554C2 |
| БЛОК КОНТРОЛЯ СКОРОСТИ И УСКОРЕНИЯ С УПРАВЛЯЕМЫМ ЭЛЕКТРОННЫМ СПОСОБОМ ПУСКОВЫМ СЕРВОМЕХАНИЗМОМ ДЛЯ ПРИМЕНЕНИЯ В ПОДЪЕМНО-ТРАНСПОРТНЫХ СРЕДСТВАХ | 2008 |
|
RU2472693C2 |

