УРОВЕНЬ ТЕХНИКИ
[0001] Лифты обычно содержат кабину, которая движется вертикально в шахте между этажами здания. Разнообразные известные средства контроля обеспечивают желаемое качество обслуживания лифтов. Например, известны способы контроля скорости, с помощью которых кабина лифта движется согласно заданному профилю, обеспечивающему быструю доставку пассажиров с сохранением комфорта. Профили перемещения лифта содержат, например, ускорение, перемещение с постоянной скоростью и замедление. Управление ускорением и замедлением применяется для управления кабиной лифта при старте от посадочной площадки, где была остановлена кабина лифта или при приближении к посадочной площадке для запланированной остановки.
[0002] Например, устройства, используемые для управления скоростью лифта, содержат датчики приближения, расположенные вблизи посадочных площадок. Если лифт приближается к посадочной площадке таким образом, что не соответствует желаемому профилю перемещения, то при его прохождении через соответствующий датчик приближения последний инициирует управляемую остановку кабины лифта. Такая управляемая остановка обычно осуществляется благодаря управлению тормозом, который соединен с двигателем, ответственным за перемещение кабины лифта. Одним недостатком известных систем, использующих такие датчики, является то, что датчики требуют операций установки и технического обслуживания.
[0003] Еще одним устройством управления скоростью является ограничитель скорости, который используется для обнаружения превышения заданной предельно допустимой скорости кабины лифта. Ограничитель обычно используют для инициирования экстренной остановки с помощью предохранительного оборудования, которое установлено на кабине лифта. Ограничители, как правило, являются устройствами, требующими значительного объема технического обслуживания.
[0004] Были предложены конфигурации, которые содержат более одной кабины внутри одной шахты. Расположение более одной кабины лифта в шахте предъявляет специальные требования к управлению позицией и перемещением кабин для предотвращения контакта между ними. Указанные требования дополняют ограничения предъявляемые к системам, имеющим одну кабину в шахте.
РАСКРЫТИЕ ИЗОБРЕТЕНИЯ
[0005] Приведенная в качестве примера лифтовая система содержит кабину лифта. Индикатор положения кабины предоставляет информацию, указывающую на текущие позицию и скорость кабины. Блок управления управляет перемещением кабины лифта в ответ на указание от индикатора положения кабины, что кабина лифта движется слишком быстро вблизи посадочной площадки, соответствующей запланированной остановке кабины лифта.
[0006] Приведенный в качестве примера способ управления перемещением кабины лифта включает определение абсолютного положения и скорости кабины лифта. Работой тормоза управляют в ответ на указание, что кабина лифта движется слишком быстро вблизи посадочной площадки, соответствующей запланированной остановке кабины лифта.
[0007] В одном примере показано несколько кабин лифтов внутри одной шахты, и работой тормоза для каждой кабины лифта управляют индивидуально на основании положения и скорости соответствующей кабины, когда она движется вблизи запланированной остановки.
[0008] Различные признаки и преимущества раскрытых примеров станут понятны для специалистов в данной области из нижеследующего подробного описания вариантов осуществления изобретения, являющихся на данный момент предпочтительными. Чертежи, которые прилагаются к подробному описанию, кратко описаны ниже.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0009] Фиг.1 схематично иллюстрирует выбранные части лифтовой системы, содержащей средства управления перемещением, выполненные согласно варианту осуществления настоящего изобретения.
ОСУЩЕСТВЛЕНИЕ ИЗОБРЕТЕНИЯ
[00010] Фиг.1 схематично иллюстрирует выбранные части лифтовой системы 20, в том числе первую кабину 22 лифта, которая расположена для обеспечения перемещения в шахте 24. Привод 30, содержащий двигатель 32 и тормоз 34, приводит в движение кабину 22. Блок 36 управления первого привода управляет работой двигателя 32 и тормоза 34 для обеспечения заданного перемещения кабины 22 или для удержания кабины 22 в заданном стационарном положении в шахте 24.
[00011] Система, показанная в качестве примера, содержит вторую кабину 42 лифта в шахте 24. Кабина 42 имеет относящийся к ней привод 50, который содержит двигатель 52 и тормоз 54. Блок 56 управления второго привода управляет работой двигателя 52 и тормоза 54 для обеспечения заданного перемещения или заданного положения кабины 42.
[00012] Индикатор 60 положения кабины лифта предоставляет информацию, которая показывает текущее положение и текущую скорость каждой кабины 22 и 42 вдоль всей траектории соответствующей кабины лифта в шахте 24. В одном примере индикатор 60 предоставляет информацию об абсолютном положении кабин в шахте 24. Информация, относящаяся к положению кабины, используется в одном примере для определения информации о скорости на основании соотношения между изменением положения и времени. В другом примере определение положения и скорости выполняют раздельно.
[00013] Представленный в качестве примера индикатор 60 содержит первое определяющее положение устройство 62, соединенное с кабиной 22, и второе определяющее положение устройство 64, соединенное с кабиной 42. В этом примере устройства 62 и 64 регистрируют или считывают информацию о положении на неподвижном индикаторе 66 положения в шахте 24. В одном примере применяют стальную ленту с проходящим вдоль ленты неповторяющимся шифром, так что информация об абсолютном положении соответствующей кабине в шахте 24, может быть определена на основании шифра, зарегистрированного или считанного устройствами 62 и 64, соответственно. Другие показывающие положение устройства и соответствующие датчики могут быть использованы вместо стальной ленты и регистраторов или считывателей описанных в примере.
[00014] В примере, показанном на фиг.1, могут быть использованы технические средства, описанные в опубликованной заявке на патент WO 2007/145613, ссылка на которую означает ее полное включение в описание настоящей заявки. Указанное устройство имеет возможность управления расстоянием между кабинами согласно принципам указанной заявки и управления скоростью кабин лифтов вблизи запланированных остановок согласно настоящему описанию.
[00015] Блок управления 70 взаимодействует с устройствами 62 и 64 и отслеживает положение соответствующей кабины лифта. В одном примере определяющий скорость модуль 72 соотносит информацию о положении кабины со временем для определения скорости. В другом примере модуль 72 выполняет независимое определение скорости, не нуждаясь в информации о положении кабины, собираемой устройствами 62 и 64.
[00016] Блок 70 взаимодействует с блоками 36 и 56 для поддержания заданных параметров перемещения кабины лифта. В частности, блок 70 определяет, не движется ли какая-либо из кабин 24 или 42 лифтов быстрее, чем задано, когда находится близко к своей запланированной остановке. В одном примере блок 70 запрограммирован для мониторинга скорости кабины лифта, когда кабины лифтов приближаются к запланированной остановке. В другом примере блок 70 осуществляет мониторинг скорости кабины лифта, когда кабины лифтов приближаются к запланированной остановке и покидают ее. Запланированная остановка может быть произведена в любом месте вдоль вертикальной траектории кабин 24 и 42, включая конечные остановки на концах шахты 24. В одном примере блок 70 осуществляет мониторинг скорости кабины лифта, когда кабины приближаются к каждой запланированной остановке для каждой кабины.
[00017] Когда кабина лифта движется быстрее, чем ожидается вблизи посадочной площадки для запланированной остановки, блок 70 взаимодействует с соответствующим блоком 36 или 56 для инициирования управляемой остановки соответствующей кабины лифта. В одном примере соответствующий блок 36 или 56 инициирует торможение с помощью тормоза 34, 54 соответствующего привода.
[00018] Этот подход позволяет устранить необходимость в механических датчиках приближения и соответствующих направляющих устройствах в шахте для определения скорости кабины лифта, которая приближается к положению для запланированной остановки.
[00019] Еще одним признаком настоящего примера является то, что блок 70 запрограммирован для определения того, не движется ли какая-либо из кабин лифта со скоростью, которая превышает предельно допустимую скорость, соответствующую состоянию разноса. Указанное определение может осуществляться вне зависимости от положения кабины лифта в шахте 24, хотя некоторые положения, такие как концы шахты, могут иметь отличные от других предельно допустимые скорости. В случае если кабина движется с превышением предельно допустимой скорости, блок 70 взаимодействует с блоком управления соответствующего привода, который в ответ на это применяет соответствующий тормоз 34, 54 для остановки соответствующей кабины лифта.
[00020] Данный пример содержит активатор 80 предохранительного оборудования, соединенный с каждой кабиной для активации предохранительного оборудования 82, которое предназначено для экстренной остановки в ситуациях, когда применения тормоза привода не достаточно для остановки кабины лифта требуемым образом. Оборудование 82 работает известным способом для обеспечения остановки соответствующей кабины лифта. В одном примере оборудование 82 сопрягается с направляющим рельсом (не показан) известным способом в ответ на команду или активирующий сигнал, которая или который инициирует экстренную остановку. Приведение в действие предохранительного оборудования по указанию блока 70 позволяет устранить отдельный ограничитель скорости из системы 20. В этом примере блок 70 взаимодействует с активаторами 80, когда необходимо осуществить торможение с применением оборудования 82.
[00021] Показанный пример позволяет устранить механические или электронные компоненты, ранее применявшиеся в лифтовых системах, такие как датчики приближения и ограничители скорости. Без необходимости установки указанных устройств установка и техническое обслуживание лифтовой системы становятся более экономичными за счет снижения материальных и трудовых издержек.
[00022] Выполняемые блоком 70 функции по определению положения, мониторингу скорости и передаче команды об активации торможения могут быть реализованы различными конфигурациями аппаратного обеспечения, программного обеспечения, микропрограммного обеспечения или их сочетаниями. В некоторых примерах блок 70 представляет собой выделенное устройство или программный модуль. В других примерах блок 70 является встроенным по меньшей мере в один из других блоков управления, таких как блок 36, 56, групповой блок управления (не показан) или диспетчерский блок управления (не показан). Специалисты в данной области техники, обладающие преимуществами настоящего описания, смогут реализовать блок управления, функционально сопоставимый с приведенным в качестве примера блоком 70, отвечающий требованиям конкретной частной ситуации.
[00023] Представленное выше описание приведено в качестве примера, но не ограничения. Для специалистов очевидны изменения и модификации раскрытых примеров, которые находятся в рамках сущности настоящего изобретения. Объем правовой охраны настоящего изобретения определен прилагаемой формулой изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПАСАТЕЛЬНАЯ ЛИФТОВАЯ СИСТЕМА | 2009 |
|
RU2500604C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ГРУППЫ КАБИН ЛИФТА В ОДНОЙ ШАХТЕ | 2007 |
|
RU2484002C2 |
| СПОСОБ УПРАВЛЕНИЯ ЛИФТОВОЙ СИСТЕМОЙ С ГРУППОЙ КАБИН И ЛИФТОВАЯ СИСТЕМА | 2006 |
|
RU2423310C2 |
| СПОСОБ ЭКСПЛУАТАЦИИ ЛИФТОВ | 2011 |
|
RU2584037C2 |
| АВТОМАТИЧЕСКАЯ АДРЕСАЦИЯ УСТАНОВОЧНЫХ ПРИСПОСОБЛЕНИЙ ЛИФТА | 2008 |
|
RU2492129C2 |
| СИСТЕМА ОБНАРУЖЕНИЯ И ОБРАБОТКИ ПРЕВЫШЕНИЯ УСКОРЕНИЯ И ПРЕВЫШЕНИЯ СКОРОСТИ | 2009 |
|
RU2487074C2 |
| УСТРОЙСТВО КОНТРОЛЯ ДЛЯ ЛИФТОВОЙ УСТАНОВКИ | 2016 |
|
RU2717604C2 |
| СПОСОБ ДИСТАНЦИОННОЙ ДИАГНОСТИКИ ЛИФТОВОЙ УСТАНОВКИ И ЛИФТОВАЯ УСТАНОВКА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2010 |
|
RU2534830C2 |
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ ПРОФИЛЕМ ДВИЖЕНИЯ КАБИНЫ ЛИФТА | 2008 |
|
RU2482048C2 |
| СИСТЕМА ЗАЩИТЫ ЛИФТА ОТ ПРЕВЫШЕНИЯ УСКОРЕНИЯ И ПРЕВЫШЕНИЯ СКОРОСТИ | 2009 |
|
RU2491224C2 |
Изобретение относится к устройствам обеспечения безопасности эксплуатации лифтовой установки. При управлении перемещением кабины лифта (22, 42) обеспечивают наличие индикатора положения (60), содержащего неподвижный индикатор положения (66) в шахте (24) и указывающего на каждое положение кабины лифта (22, 42), для предоставления информации, относящейся к каждому положению кабины лифта (22, 42), и определяющего скорость модуля (72) для предоставления информации о скорости кабины лифта (22, 42). Определяют превышение скорости перемещения кабины (22, 42) лифта вблизи посадочной площадки, соответствующей запланированной остановке кабины лифта (22, 42). Управляют перемещением кабины лифта (22, 42) в ответ на указанное определение. Управляют работой тормоза (34), соединенного с приводом (30, 50) для перемещения кабины лифта (22, 42), для ее остановки в ответ на информацию, указывающую на превышение скорости перемещения кабины (22, 42) вблизи посадочной площадки. Достигается повышение безопасности. 2 н. и 10 з.п. ф-лы, 1 ил.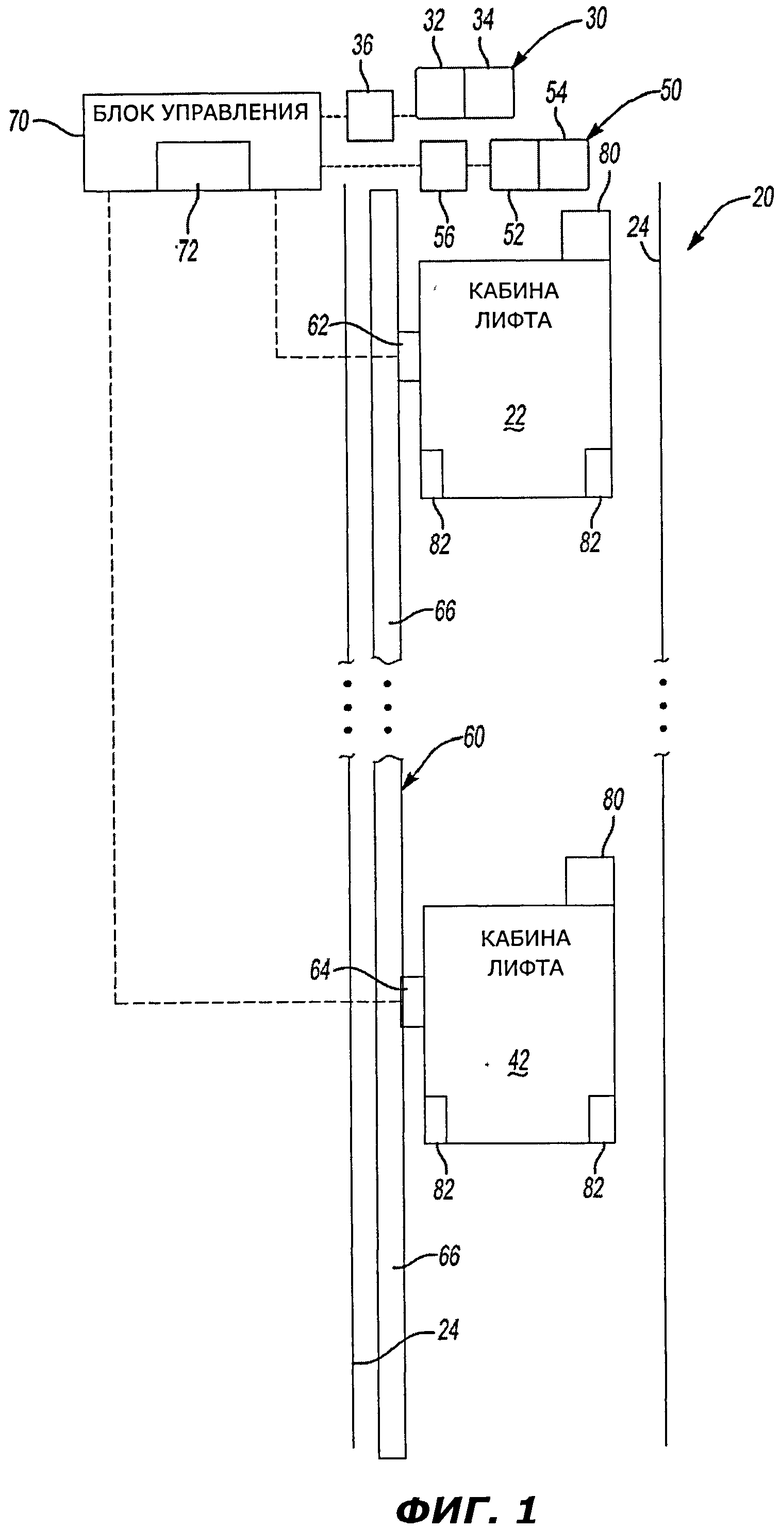
1. Лифтовая система, содержащая
кабину лифта, которая расположена для обеспечения перемещения в шахте;
индикатор положения, содержащий неподвижный индикатор положения в шахте и указывающий на каждое положение кабины лифта, и определяющий скорость модуль, предоставляющий информацию, указывающую на скорость кабины лифта;
блок управления, выполненный с возможностью управления перемещением кабины лифта в ответ на информацию, указывающую на превышение скорости перемещения кабины лифта вблизи посадочной площадки, соответствующей запланированной остановке кабины лифта; и привод, имеющий двигатель и тормоз, для управления перемещением кабины лифта, причем указанный блок управления выполнен с возможностью управления работой тормоза для остановки кабины лифта в ответ на информацию, указывающую на превышение скорости перемещения кабины, вблизи посадочной площадки.
2. Лифтовая система по п.1, в которой блок управления выполнен с возможностью инициирования остановки кабины лифта в ответ на информацию, указывающую на превышение скорости перемещения кабины лифта вблизи посадочной площадки.
3. Лифтовая система по п.1, содержащая предохранительное оборудование, соединенное с кабиной лифта, для обеспечения выборочной остановки кабины лифта, причем блок управления выполнен с возможностью управления работой предохранительного оборудования для обеспечения остановки кабины лифта в ответ на информацию, указывающую на скорость перемещения кабины лифта, превышающую предельно допустимую скорость.
4. Лифтовая система по п.1, в которой блок управления выполнен с возможностью использования информации о положении кабины лифта относительно времени для определения ее скорости.
5. Лифтовая система по п.1, содержащая
вторую кабину лифта, выполненную с возможностью перемещения вдоль вертикальной траектории первой кабины лифта,
в которой индикатор положения предоставляет информацию, указывающую на каждое положение каждой кабины лифта, соответственно, а блок управления выполнен с возможностью управления перемещением каждой кабины лифта, соответственно, в ответ на указанную информацию.
6. Лифтовая система по п.1, в которой индикатором положения предоставлена информация об абсолютном положении для каждого положения кабины лифта.
7. Способ управления перемещением кабины лифта, содержащий следующие этапы:
обеспечение наличия индикатора положения, содержащего неподвижный индикатор положения в шахте и указывающего на каждое положение кабины лифта, для предоставления информации, относящейся к каждому положению кабины лифта и определяющего скорость модуля для предоставления информации о скорости кабины лифта;
определение превышения скорости перемещения кабины лифта вблизи посадочной площадки, соответствующей запланированной остановке кабины лифта;
управление перемещением кабины лифта в ответ на указанное определение и
управление работой тормоза, соединенного с приводом для перемещения кабины лифта, для ее остановки в ответ на информацию, указывающую на превышение скорости перемещения кабины вблизи посадочной площадки.
8. Способ по п.7, содержащий
инициирование остановки кабины лифта в ответ на информацию, указывающую на превышение скорости перемещения кабины лифта вблизи посадочной площадки.
9. Способ по п.7, содержащий
активацию предохранительного оборудования, соединенного с кабиной лифта, для обеспечения остановки кабины лифта в ответ на информацию, указывающую на перемещение кабины лифта со скоростью, превышающей предельно допустимую скорость.
10. Способ по п.7, содержащий
определение скорости кабины лифта из информации о ее положении кабины лифта относительно времени.
11. Способ по п.7, в котором в одной шахте расположено по меньшей мере две кабины лифта, содержащий
предоставление информации, указывающей на каждое положение каждой кабины лифта, соответственно; и
управление перемещением каждой кабины лифта, соответственно, в ответ на указанную информацию.
12. Способ по п.7, содержащий
предоставление информации об абсолютном положении для каждого положения кабины лифта.
| Усилитель мощности с термозащитой | 1990 |
|
SU1688383A1 |
| WO 2006103768 А1, 05.10.2006 | |||
| JP 2003104648 A, 09.04.2003 | |||
| УСТРОЙСТВО ЗАЩИТЫ И КОНТРОЛЯ ШАХТНОЙ ПОДЪЕМНОЙ УСТАНОВКИ | 1996 |
|
RU2114043C1 |

