Изобретение относится к области ближней локации и может быть использовано в информационно-измерительных средствах и системах, работающих в режимах активного распознавания слабоконтрастных точечных или распределенных целей на фоне широкополосных и распределенных в пространстве помех.
Уровень техники
Существующие в настоящее время автономные информационные системы (АИС) ближней локации (БЛ) с модуляцией по периодическому закону обладают существенным недостатком, выражающимся в пространственной периодичности функции чувствительности по дальности. Периодичность функции чувствительности приводит к тому, что постановка активных или пассивных помех с расстояний, превышающих рабочую дальность АИС, снижает отношение сигнал/шум на входе тракта принятия решения и может вызывать ложные срабатывания АИС. Также существует проблема неинвариантности работы существующих АИС БЛ по отношению к типу поверхности и амплитуде принятого сигнала.
Аналогом предлагаемого устройства является фиксатор дальности [4] с ЧМ, содержащий приемопередатчик, к выходу которого подключены канал выделения n-й гармоники сигнала частоты Допплера, выход которого подключен к первому входу аналогового компаратора; и канал выделения n+k-й гармоники сигнала частоты Допплера, выход которого через интегратор подключен ко второму входу аналогового компаратора; компаратор выходом через усилитель-ограничитель и счетчик импульсов подключен ко входу исполнительного устройства,
Недостатком данного устройства является низкая помехоустойчивость, так как известно, что согласованным фильтром для последовательности импульсов является рециркулятор. Таким образом, способ обработки, используемый в данном устройстве, не является оптимальным по критерию максимума отношения сигнал-шум. Также устройство имеет периодическую функцию чувствительности, что может привести к ложным срабатываниям на дальностях, больших рабочей.
Наиболее близким по технической сущности к разрабатываемому устройству является АИС БЛ с частотной модуляцией (ЧМ) и спектральной обработкой [1], выбранная за прототип.
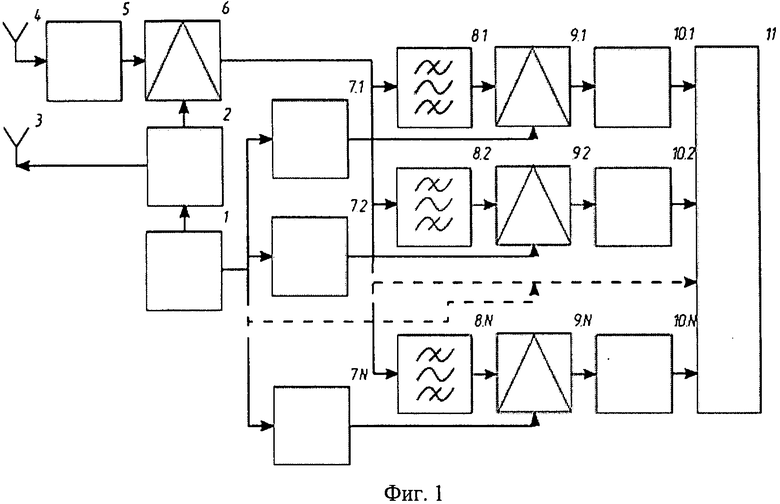
На фиг.1 показана передающая часть АИС БЛ, состоящая из частотного модулятора 1, генератора 2, передающей антенны 3, и приемная часть АИС БЛ, состоящая из приемной антенны 4, тракта обработки СВЧ 5, смесителя 6, N каналов спектральной обработки и анализатора спектра 11, реализующего совместную обработку сигналов. Каждый канал спектральной обработки состоит из умножителя частоты 7, усилителя-фильтра гармоник 8, смесителя 9, детектора-усилителя допплеровской частоты 10; частотный модулятор осуществляет модуляцию периодическим сигналом. Анализатор определяет дальность до объекта, вычисляя соотношения амплитуд сигналов на выходах допплеровских каналов.
Недостатком данного устройства является периодичность функции чувствительности по дальности и, как следствие, низкая помехоустойчивость. Наиболее опасными являются активные помехи от мощных ретрансляционных станций, которые переизлучают принятый сигнал в направлении АИС, имитируя сигнал от цели. При работе по точечным слабоконтрастным целям также опасны пассивные помехи, находящиеся за пределами рабочей дальности. Поэтому для обеспечения требуемой помехоустойчивости при работе по точечным и распределенным целям необходимо формирование функции чувствительности, равной нулю за пределами рабочей дальности АИС.
В предлагаемом устройстве помехоустойчивость предлагается повысить применением предельной регрессионной обработки сигнала частоты Допплера, а периодичность функции чувствительности устранить при помощи комбинированной ЧМ пилообразным сигналом и шумом.
Раскрытие изобретения
Задачей изобретения является повышение точности фиксации дальности до распределенного или слабоконтрастного точечного объекта, а также обеспечение высокой помехоустойчивости за пределами рабочей дальности и инвариантности работы АИС по отношению к типу цели.
Поставленная задача решается наличием в предложенном устройстве - радиолокационном фиксаторе дальности - новых относительно прототипа элементов: генератора шума, сигнал которого складывается с пилообразным модулирующим сигналом, и устройства предельной регрессионной обработки в качестве анализатора спектра, которое повышает точность фиксации дальности, а также обеспечивает отсечку функции чувствительности за пределами рабочей дальности и инвариантность работы АИС по отношению к типу цели.
Сравнение с прототипом показывает, что повышена точность фиксации дальности и защита АИС от ложных срабатываний по искусственным и естественным широкополосным и распределенным в пространстве помехам за пределами рабочей дальности. Это позволяет сделать вывод о соответствии предложенного решения критерию «изобретательский уровень».
Перечень фигур
Фиг.1 - типовая структурная схема системы ближней радиолокации (СБРЛ) с периодической частотной модуляцией излучаемого сигнала (прототип);
Фиг.2 - структурная схема фиксатора дальности с непрерывной частотной модуляцией по пилообразному и случайному законам;
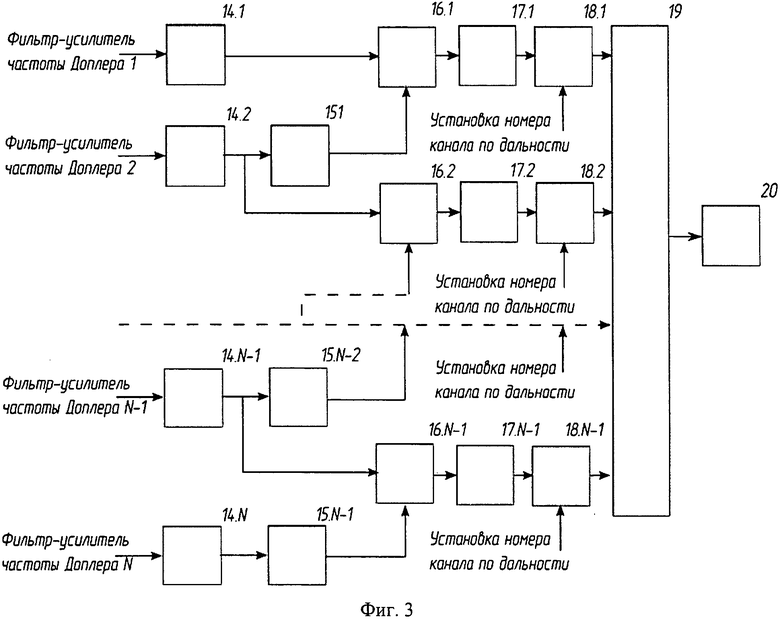
Фиг.3 - структурная схема анализатора спектра, реализующего предельную регрессионную обработку;
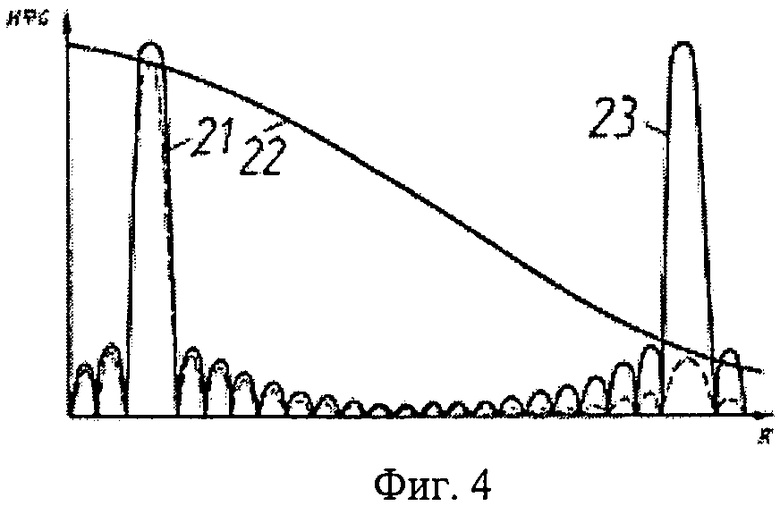
Фиг.4 - виды нормированной функции чувствительности по дальности при периодической (24), шумовой (23) и комбинированной (22) ЧМ.
Осуществление изобретения
На фиг.2 показана передающая часть радиолокационного фиксатора дальности, состоящая из генератора сигнала пилообразной ЧМ 1, генератора шума 12, соединенных через сумматор 13 с управляемым генератором несущей частоты 2; передающей антенны 3, и приемная часть радиолокационного фиксатора дальности, состоящая из приемной антенны 4, тракта обработки СВЧ 5, смесителя 6, N каналов спектральной обработки на частоте Допплера и анализатора спектра 11, причем к гетеродинному входу балансного смесителя 6 подсоединен второй выход управляемого генератора несущей частоты.
Каждый канал частоты Допплера состоит из усилителя-фильтра гармоники 8, соединенного со смесителем 9, на второй вход которого подается сигнал соответствующий номеру канала гармоники с умножителя частоты 7, а также из фильтра-усилителя частоты Допплера 10.
На фиг.3 представлена структурная схема анализатора спектра 11. Анализатор спектра состоит из N аналогичных друг другу каналов, обрабатывающих допплеровские сигналы, полученные с приемного блока. Каждый канал анализатора спектра 11 состоит из инерционного детектора 14, делителя 15, устройства вычитания 16, порогового устройства 17, схемы совпадения 18; кроме того, в каждом канале, за исключением первого, после инерционного детектора 14 сигнал ответвляется и через делитель 15 поступает на второй вход устройства вычитания 16 предыдущего канала. Выходы всех каналов объединены схемой ИЛИ 19, которая, в свою очередь, подключена к выходному устройству 20.
На фиг.4 показан график нормированной функции чувствительности по дальности при периодической, шумовой и комбинированной ЧМ. Результатом применения вышеуказанной ЧМ является подавление функции чувствительности на дальностях, определенных девиацией шумовой модуляции.
Предложенное устройство работает следующим образом.
Количество каналов в устройстве определяется диапазоном фиксируемых дальностей и разрешающей способностью устройства по дальности. Известно, что разрешающая способность по дальности устройств с пилообразной ЧМ зависит от девиации частоты:
где R - разрешающая способность по дальности; с - скорость света; ∆f - девиация частоты.
Например, для того чтобы производить оценку дальностей 3, 6 и 9 метров с точностью в 1 м, требуется трехканальная система с девиацией частоты пилообразной ЧМ в 150 МГц, с каналами, настроенными соответственно на 3-ю, 6-ю и 9-ю гармоники сигнала разностной частоты, получаемого со смесителя 6.
Спектр сигнала разностной частоты на выходе смесителя 6 представляет собой набор гармоник с частотами, кратными частоте повторения пилообразной ЧМ и сдвинутыми за счет допплеровской добавки. Последнее объясняется периодичностью сигнала разностной частоты, получаемого на выходе смесителя 6 с периодом, равным периоду ЧМ. В каждом канале частоты Допплера из этого сигнала при помощи фильтра 8 выделяется соответствующая номеру канала гармоника, затем полученный сигнал претерпевает второе преобразование частоты на смесителе 9, а фильтрами-усилителями частоты Допплера 10 из него выделяется сигнал допплеровской частоты.
Каждый канал анализатора 11 работает следующим образом. Инерционный детектор 14 выделяет и накапливает огибающую сигнала Допплера; устройство вычитания 16 вычисляет разность между накопленными сигналами в текущем и следующем каналах, причем сигнал следующего канала претерпевает на аттенюаторе (делителе) 15 ослабление с коэффициентом, равным knβn,n+1, где n - номер рассматриваемого канала, kn - коэффициент, учитывающий особенности распространения электромагнитных волн рабочего диапазона в атмосфере, а также затухание соответствующей данному каналу m-й гармоники сигнала после смесителя 9 вследствие шумовой добавки в ЧМ, βn,n+1 - коэффициент ослабления сигнала с выхода инерционного детектора n+1-го канала при его вычитании на вычитателе 16 из сигнала n-го канала; пороговое устройство 17 сравнивает разность с заданным порогом; схема совпадения 18, представляющая собой ключ, открывающийся при совпадении номера канала с установкой, пропускает выходной сигнал порогового устройства 77 на схему ИЛИ 19; сигнал схемы ИЛИ 19 управляет выходным устройством 20.
Таким образом, как только на входе какой-либо пары n и n+1 соседних каналов анализатора появятся такие допплеровские сигналы, что выполнится неравенство (2), то пороговое устройство 17 n-го канала даст на своем выходе единичный логический уровень. Полученный логический уровень может повлиять на состояние схемы ИЛИ 19 только в случае совпадения n и номера канала согласно установке по дальности.

где xn, xn+1 - сигналы на выходах инерционных детекторов 14 каналов n и n+1 соответственно; Un - величина порога в устройстве 17.
Неравенство (2) согласно [2] решает задачу совместного обнаружения и распознавания сигнала. Посредством подбора величины коэффициентов βn+1,n и kn возможно увеличить точность фиксации дальности; при этом коэффициент kn учитывает физические особенности распространения электромагнитных волн рабочего диапазона в атмосфере, а также затухание соответствующей номеру канала m-й гармоники сигнала после смесителя 6 вследствие шумовой добавки в ЧМ.
В качестве периодического модулирующего сигнала выбран пилообразный сигнал с нулевым обратным ходом, нормированная функция чувствительности по дальности при спектральной обработке для которого имеет вид:
где Bm - амплитуда m-й гармоники сигнала разностной частоты; τc - задержка сигнала; τg - задержка сигнала генератора; ∆f- девиация частоты.
Данная функция чувствительности имеет периодический характер (фиг.4) и может иметь высокие значения за пределами рабочей дальности АИС, что может привести к ложному срабатыванию. Предлагаемое решение этой проблемы заключается в дополнении ЧМ по пилообразному закону шумовой ЧМ. Функция чувствительности в этом случае согласно [3] имеет вид:

где ∆ωξ - девиация частоты шумовой модуляции; ∆τ - задержка прихода зондирующего сигнала.
Выбором девиации частоты шумовой модуляции возможно управлять крутизной затухания функции чувствительности по дальности:
где α через показатель экспоненты в (4) определяет затухание функции чувствительности на дальности, соответствующей задержке зондирующего сигнала, равной τ0.
При разработке АИС БЛ часто требуется обеспечить наименьшие габариты устройства, а также снизить потребляемую им мощность. Следует отметить, в данном случае, что фиксация n различных дальностей возможна и в двухканальном варианте представленного устройства. В таком случае, согласно установленной фиксируемой дальности производится выбор девиации пилообразной ЧМ при обеспечении постоянства частоты рабочей гармоники. В качестве примера в таблице 1 представлены значения девиации частоты при работе по дальностям 3, 6 и 9 метров при постоянной частоте повторения пилообразной ЧМ в 2 МГц.
Источники информации
1. Коган И.М. Ближняя радиолокация (теоретические основы). - М.: Советское радио, 1973. - 272 с.
2. Хохлов В.К. Обнаружение, распознавание и пеленгация объектов в ближней локации. Издательство МГТУ им.Н.Э.Баумана, 2003.
3. Печенкин А.О., Ляпин Б.Д. Частотно-модулированные радиопередатчики со спектральной обработкой результирующего сигнала. М.: ЦНИИНТИ, 1982 - 121 с.
4. Патент RU 2379701 C1.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЛИЖНЕЙ ЛОКАЦИИ ДЛЯ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2013 |
|
RU2535302C1 |
| КОГЕРЕНТНО-ИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 2002 |
|
RU2230338C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ КОНЦЕНТРАЦИИ ГАЗА | 2000 |
|
RU2170922C1 |
| ПРИЕМНО-ПЕРЕДАЮЩЕЕ УСТРОЙСТВО ГОМОДИННОГО РАДИОЛОКАТОРА | 2000 |
|
RU2189055C2 |
| ЧМ-ДАЛЬНОМЕР НЕПРЕРЫВНОГО СЛЕЖЕНИЯ С ДРОБНО-ДИФФЕРЕНЦИРУЮЩИМ ФИЛЬТРОМ | 2010 |
|
RU2439592C1 |
| РАДИОВОЛНОВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ КОЛЕБАНИЙ | 2014 |
|
RU2584496C1 |
| ДОПЛЕРОВСКИЙ РАДИОВОЛНОВОЙ ИЗВЕЩАТЕЛЬ ДЛЯ ОХРАННОЙ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ | 1993 |
|
RU2117962C1 |
| НЕЙРОСЕТЕВАЯ АДАПТИВНАЯ СИСТЕМА РАСПОЗНАВАНИЯ ОБЪЕКТОВ ПО ИХ АКУСТИЧЕСКИМ ИЗЛУЧЕНИЯМ | 2013 |
|
RU2513719C1 |
| СПОСОБ ДОПЛЕРОВСКОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ АЭРОЛОГИЧЕСКОГО РАДИОЗОНДА И РАДИОЛОКАЦИОННАЯ СИСТЕМА ЕГО РЕАЛИЗУЮЩАЯ | 2023 |
|
RU2808775C1 |
| Доплеровский измеритель скорости и угла сноса с функцией измерения истинной высоты с реализацией собственной чувствительности приёмного устройства | 2024 |
|
RU2839852C1 |
Изобретение относится к области ближней локации. Достигаемый технический результат - повышение точности фиксации дальности до распределенного или слабоконтрастного точечного объекта, а также обеспечение высокой помехоустойчивости за пределами рабочей дальности и инвариантности работы автономной информационной системы (АИС) по отношению к типу цели. Указанный результат достигается наличием новых относительно прототипа элементов: генератора шума, сигнал которого складывается с пилообразным модулирующим сигналом, и устройства предельной регрессионной обработки в качестве анализатора, которое повышает точность фиксации дальности, а также обеспечивает отсечку функции чувствительности за пределами рабочей дальности и инвариантность работы АИС по отношению к типу цели. 4 ил.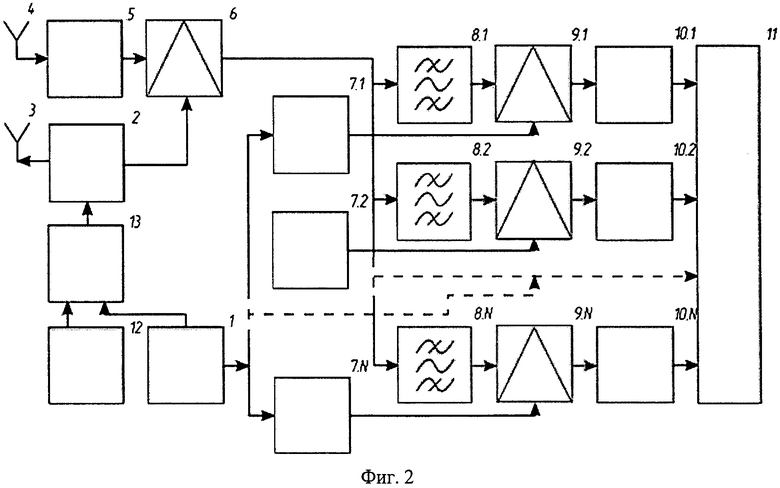
Радиолокационный фиксатор дальности с непрерывным излучением сигнала с комбинированной частотной модуляцией по пилообразному и случайному законам и предельной регрессионной обработкой, включающий в себя передающий блок, состоящий из генератора модулирующего сигнала, один выход которого подает гармонический сигнал с частотой модуляции на входы умножителей частоты, настроенных на соответствующие гармоники сигнала частоты Допплера в каналах спектральной обработки приемного блока, управляемый генератор несущей частоты, один выход которого соединен с передающей антенной, а второй подключен к гетеродинному входу балансного смесителя приемного блока, приемный блок, содержащий приемную антенну, соединенную со входом тракта обработки СВЧ, выход которого подключен к первому входу балансного смесителя, к гетеродинному входу которого подключен второй выход управляемого генератора несущей частоты, выход балансного смесителя подключен ко входам каналов спектральной обработки, каждый из которых содержит полосовой фильтр, выходом соединенный с первым входом смесителя и настроенный на значение допплеровской частоты на соответствующей номеру канала гармонике сигнала разностной частоты, полученного с выхода балансного смесителя, гетеродинный вход смесителя соединен с соответствующим умножителем частоты передающего блока, выход смесителя соединен со входом фильтра-усилителя частоты Допплера, выход которого соединен с входом инерционного детектора соответствующего канала анализатора спектра, и анализатор спектра, отличающийся тем, что в передающем блоке генератор модулирующего сигнала вторым выходом соединен со входом сумматора, ко второму входу которого подключен выход генератора шума, а выход сумматора соединен с управляющим входом управляемого генератора несущей частоты, анализатор спектра содержит схему предельной регрессионной обработки, состоящую из N аналогичных каналов, при этом выход инерционного детектора каждого (n-го) канала анализатора соединен с первым входом вычитателя того же канала, ко второму входу которого через делитель подключен выход инерционного детектора следующего (n+1-го) канала обработки; выход каждого вычитателя соединен со входом порогового устройства, выход которого через ключ подключен к схеме ИЛИ, при этом ключ каждого канала имеет возможность своего открывания соответствующим сигналом установки по дальности.
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО ФИКСАЦИИ ДАЛЬНОСТИ С ЧАСТОТНОЙ МОДУЛЯЦИЕЙ | 2008 |
|
RU2379701C1 |
| СПОСОБ РАСПОЗНАВАНИЯ ПРОТЯЖЕННОЙ ПО ДАЛЬНОСТИ ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2410713C2 |
| СПОСОБ РАСПОЗНАВАНИЯ КЛАССА ЦЕЛИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2449309C1 |
| СПОСОБ ОБНАРУЖЕНИЯ И ОПРЕДЕЛЕНИЯ КООРДИНАТ ИСКОМОГО ОБЪЕКТА | 2008 |
|
RU2392635C2 |
| US 20040257556 A1, 23.12.2004 | |||
| US 4855747 A, 08.08.1989 | |||
| US 6097331 A, 10.11.2008 | |||
| Регулятор расхода | 1982 |
|
SU1043601A2 |

