Предлагаемое изобретение относится к геофизическим исследованиям поверхностей, покрытых водой, к океанографическим исследованиям.
Известны устройства для исследования водной толщи океана, содержащие трос, протянутый между судном и балластным грузом на дне, на котором закреплен контейнер с исследовательской аппаратурой [1, 2]. Известно устройство для гидрофизических исследований, состоящее из зонда с набором первичных датчиков и устройством обработки, перемещающегося по тросу, натянутому между притопленным буем и балластным грузом [3]. Известные устройства по причинам конструктивных недостатков не позволяют надежно решать задачу детального контроля гидрофизических параметров по всей глубине океана в точке исследования.
Сущность изобретения.
Для достижения упомянутых задач в аквазонде, содержащем последовательное механическое соединение якоря, размыкающего устройства и притопленного поплавка посредством троса, с расположенным на нем концевыми устройствами и перемещающимся зондом из прочного корпуса с набором первичных датчиков, устройством обработки, устройством гидроакустической связи, источником питания, приводом зонда и плавучестью, последняя выполнена в виде обтекаемого крыла, внутри которого находится механизм привода, трос пропущен через центр прочного корпуса, при этом на тросе расположены маркерные метки, первичные датчики закреплены на проставке прочного корпуса, а устройство обработки снабжено датчиком магнитной ориентации и магнитным ключом.
Из уровня техники не известно устройство с такой совокупностью отличительных признаков. Это позволяет считать заявленный "Аквазонд" отвечающим условиям патентоспособности "новизна" и "изобретательский уровень".
В соответствии с решаемыми задачами описанные отличительные признаки находятся в следующей причинно-следственной связи с ними: Выполнение плавучести в виде обтекаемого вертикального крыла позволяет одновременно решить задачу уменьшения нагрузки, создаваемой на трос прочным корпусом с расположенной в нем аппаратурой, и стабилизировать положение первичных датчиков относительно горизонтального течения.
Размещение механического привода внутри крыла позволяет максимально уменьшить изгибные деформации троса при перемещении аквазонда по нему, и, тем самым, увеличить ресурс работы.
Пропуск троса через центр прочного корпуса (который имеет сферическую форму), обеспечивает симметричную динамическую нагрузку на трос при любом направлении течений.
Датчик магнитной ориентации в сочетании с жесткой связью прочного корпуса и плавучего крыла позволяет определять направление течений без специализированного устройства.
Магнитный ключ позволяет без вскрытия прочного корпуса с аппаратурой включать и выключать аквазонд, изменять режим его работы.
Таким образом, все упомянутые отличия взаимосвязаны с поставленными задачами и позволяют достичь положительных качеств предложенного устройства.
Возможность реализации изобретения.
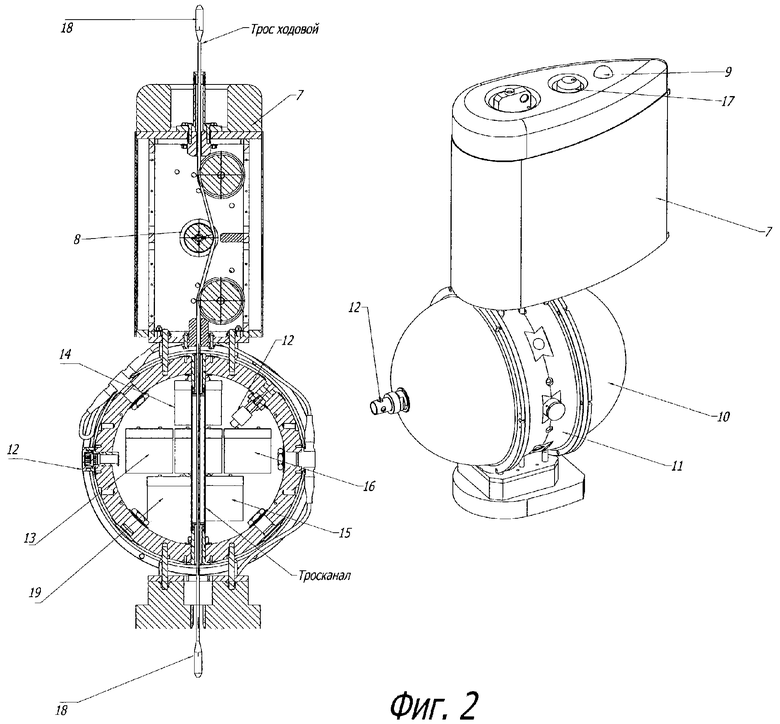
На чертежах показаны: Фиг.1 - положение развернутого аквазонда, заякоренного на дне, фиг.2 - эскизный чертеж носителя аквазонда.
Аквазонд содержит (фиг.1): балластный груз 1, расположенный на дне, соединенный отрезками троса 2 с размыкателем и притопленной плавучестью 4, на которой закреплены надводные устройства навигации - проблесковый маяк 5 и радиомаяк 6. Носитель аквазонда (фиг.2) состоит из плавучести 7, выполненной в виде обтекаемого крыла, внутри которого находится механизм привода 8, а наверху - гидрофон гидроакустической связи 9. Крыло плавучести 7 закреплено на прочном корпусе 10, на проставке которого 11 установлены первичные датчики (кислорода, флуориметр, турбидиметр, скорости течений и пр.) 12. Внутри прочного корпуса 10 находятся устройство обработки 13, устройство гидроакустической связи 14, блок питания 15 и датчик магнитной ориентации 16. Магнитный ключ 17 соединен с устройством обработки 13 и обеспечивает управление и передачу информации с носителя аквазонда на борт судна сопровождения без вскрытия прочного контейнера. На рабочей длине троса 3 установлены маркерные метки 18, которые при прохождении троса внутри прочного корпуса обеспечивают циклическое перемещение носителя аквазода по всей длине троса посредством взаимодействия с устройством управления носителем 19 и корректируют программу движения по глубине.
Аквазонд в циклирующем режиме работает следующим образом. После установки в точку на дне акватории, в соответствии с программой, заложенной в устройстве управления 19, аквазонд посредством привода 8 периодически перемещается по тросу, делая остановки на различных глубинах и фиксируя в устройстве обработки 13 показания всех гидрофизических датчиков, которыми снабжена конкретная модель аквазонда. Для периодического снятия информации обслуживающее судно 20 приходит в точку постановки и через гидроакустический канал (элементы 9 и 10 конструкции) получает накопленную в устройстве обработки 13 информацию, обнуляя его, и тем самым, готовя к следующему циклу работы. После использования энергоресурсов источника питания 15 с судна сопровождения 20 подается сигнал на срабатывание размыкателя 3. Балласт 1 остается на дне, а вся система аквазонда под действием положительной плавучести притопленного поплавка 4 поднимается на поверхность, где для надежного обнаружения используется активная работа радиомаяка 6 и фиксация радиолокационного отражателя бортовой РЛС. Аквазонд поднимается на борт и после замены источников питания готов к следующей постановке.
Источники информации
1. Патент Великобритании №2186530.
2. Патент EPV №0771429.
3. Журнал Proceedings OCEANOLOGY International 2000, March 2000, p.397-414.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОСТАНОВКИ ПРИТОПЛЕННОГО ОКЕАНОЛОГИЧЕСКОГО БУЯ | 2009 |
|
RU2404081C1 |
| Подводный лебедочный зонд | 2017 |
|
RU2642677C1 |
| Автономный дрейфующий профилирующий океанологический буй | 2015 |
|
RU2609849C1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2013 |
|
RU2546784C2 |
| ПРОФИЛОГРАФ ДЛЯ ВЕРТИКАЛЬНОГО ЗОНДИРОВАНИЯ МОРСКОЙ СРЕДЫ | 2012 |
|
RU2499280C2 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ СТАНЦИЯ ДЛЯ ГЕОЛОГИЧЕСКОГО МОНИТОРИНГА АКВАТОРИЙ | 2014 |
|
RU2566599C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ И ПОСТАНОВКИ ПРИТОПЛЕННОГО ОКЕАНОЛОГИЧЕСКОГО БУЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2529940C2 |
| АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМИЧЕСКИХ НАБЛЮДЕНИЙ | 2010 |
|
RU2438149C2 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2449325C1 |
| СПОСОБ ОБУСТРОЙСТВА МОРСКИХ ГЛУБОКОВОДНЫХ НЕФТЕГАЗОВЫХ МЕСТОРОЖДЕНИЙ | 2013 |
|
RU2547161C2 |
Изобретение относится к геофизическим исследованиям поверхностей, покрытых водой, к океанографическим исследованиям. Сущность изобретения состоит в том, что океанофизический зонд циркулирует по тросу между притопленным на поверхности океана буем и лежащим на дне балластным грузом. На тросе расположены концевые устройства и перемещающийся зонд из прочного корпуса с датчиками измеряемых параметров, устройством обработки, устройством гидроакустической связи, источником питания, приводом и плавучестью. Особенностью зонда является выполнение плавучести в виде обтекаемого вертикального крыла, внутри которого находится механизм привода, трос пропущен через центр прочного корпуса, на проставке которого закреплены первичные датчики, на тросе расположены маркерные метки, а устройство обработки снабжено датчиком магнитной ориентации и магнитным ключом. Техническим результатом является выполнение плавучести в виде обтекаемого вертикального крыла, позволяющего одновременно решить задачу уменьшения нагрузки, создаваемой на трос прочным корпусом с расположенной в нем аппаратурой, и стабилизировать положение первичных датчиков относительно горизонтального течения. 2 ил.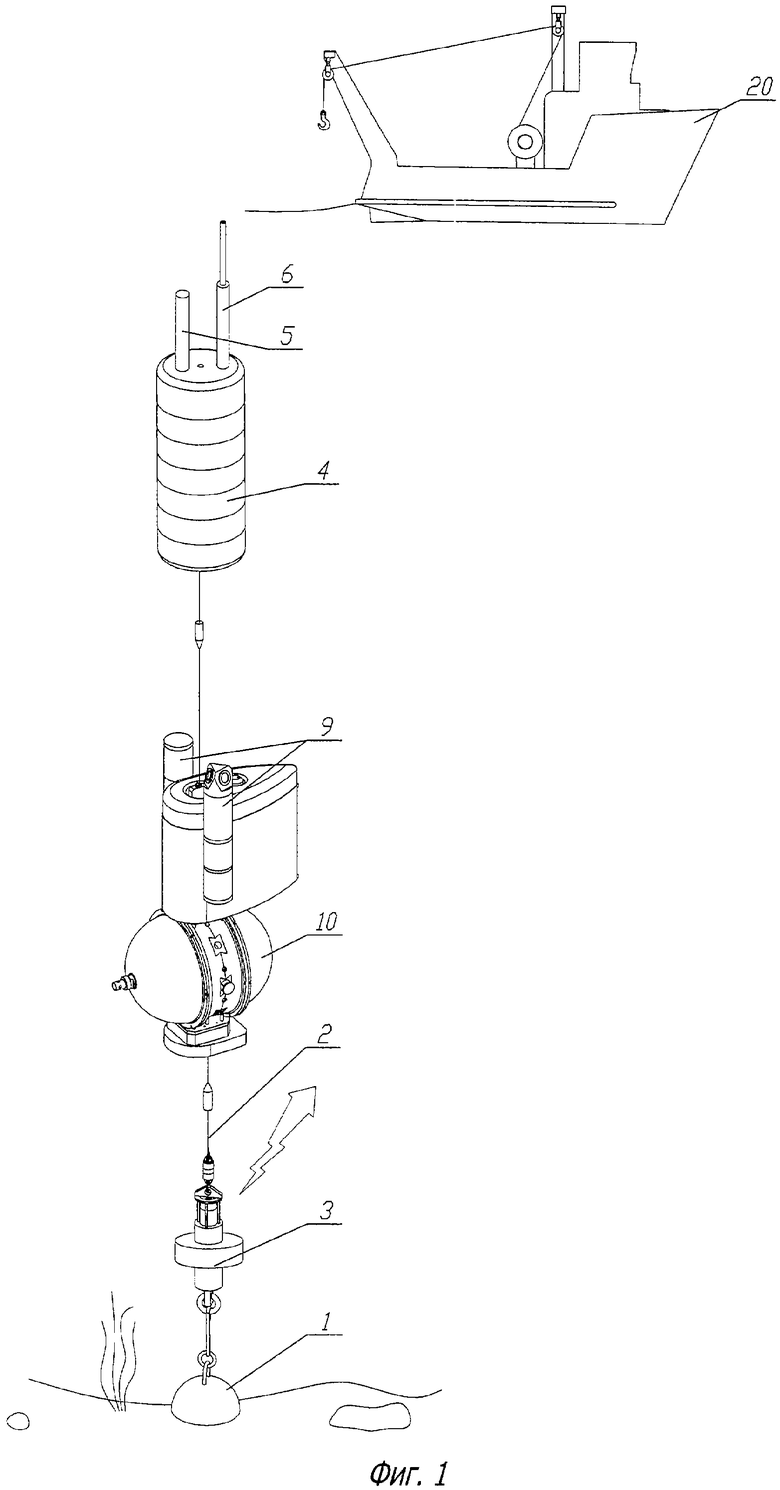
Аквазонд циклирующего режима, содержащий последовательное тросовое соединение якоря, размыкающего устройства и притопленного поплавка, при этом на тросе расположены концевые устройства и перемещающийся зонд из прочного корпуса с набором первичных датчиков, устройством обработки, устройством гидроакустической связи, источником питания, приводом и плавучестью, отличающийся тем, что плавучесть выполнена в виде обтекаемого вертикального крыла, внутри которого находится механизм привода, а трос пропущен через центр прочного корпуса, при этом на тросе расположены маркерные метки, первичные датчики закреплены на проставке прочного корпуса, а устройство обработки снабжено датчиком магнитной ориентации и магнитным ключом.
| Всплывающий зонд для измерения гидрофизических параметров воды | 1980 |
|
SU959010A1 |
| Глубоководный радиометрический зонд | 1978 |
|
SU701313A1 |
| Акустический зонд для измерения скорости звука в море | 1990 |
|
SU1770770A1 |
| Зонд для придонных исследований на акваториях | 1985 |
|
SU1317382A1 |

