Область техники, к которой относится изобретение.
Изобретение относится к области подводной робототехники, в частности к технике изучения и освоения морей, океанов и внутренних водоемов, к автономным и автоматизированным подводным профилирующим зондам.
Уровень техники.
В настоящее время активно ведутся работы по созданию автономных зондов различных типов: донных, приповерхностных и дрейфующих, которые предназначены для проведения регулярных измерений вертикальных профилей различных параметров водной среды (температуры и солености воды, скорости и направления течения, содержания растворенного кислорода и др.) в течение длительного времени. Такая способность проводить мультипараметрические измерения в толще вод делает эти системы незаменимыми для научных исследований и мониторинга озер и морских бассейнов.
Исключительно ценны для мониторинга водной среды автономные лебедочные зонды вертикального профилирования от дна до поверхности раздела вода-воздух. Такие зонды, оборудованные лебедкой и необходимыми океанологическими датчиками, стабильно работающими в автономном режиме в течение длительного времени, дают информацию о состоянии водной толщи над континентальным шельфом. Состав и исполнение подводной лебедки важны для эффективности подводного лебедочного зонда и продолжительности его автономной работы без технического обслуживания.
На сегодняшний день известные океанологические зонды лебедочного типа, как правило, включают два электронных управляющих устройства: одно - непосредственно на лебедке, второе - на подвижном носителе для управления процессом измерений параметров морской среды, в том числе с помощью датчика давления. Обе системы должны взаимодействовать по несущему кабелю, так как информация о глубине погружения измерительных датчиков является определяющей для управляющего устройства лебедки. В лебедке [Малашенко А.Е., Перунов В.В., Чудаков А.И. Автономный циркулирующий измеритель гидрофизических полей морской среды «Аквазонд» // Датчики и системы, 2013, №11, С. 61-67] используются кабель и токосъемник на валу лебедки. Уязвимость такого подхода очевидна, поскольку применение токосъемников ведет к увеличению габаритов лебедок и снижает надежность работы системы погружения-всплытия в целом.
Существующие океанологические станции также оснащаются донными лебедками с профилирующими носителями измерительной аппаратуры на конце кабель-троса [Von Alt С., Luca М.P. De, Glen S.М., Grassle J.F., Haldvogel D.B. LEO-15: Monitoring and managing coastal resources. // Sea Technol., 1997, V. 38, P. 10-16]. Такие лебедки могут быть приподняты над донным якорем с помощью плавучестей, как, например, Underwater Winch AES (http://www.nichigi.com/ocean/p_unwi.html). Указанные системы позволяют производить зондирования от дна до поверхности моря. Данные передаются либо по донному кабелю, либо по радиоканалу, когда носитель измерительной аппаратуры с терминалом связи поднимается к поверхности моря. Ослабление намотки кабеля и петлеобразование кабеля при его разматывании с барабана - это общие проблемы для подводных лебедок. При укладке кабеля на барабан подводной лебедки проблемы возникают из-за неравномерности натяжения кабеля под действием поверхностных волн, когда подвижный носитель неглубоко заглублен в приповерхностном слое воды, временами ослабевает натяжение кабеля, возникает перехлест его витков на барабане лебедки, который может привести к повреждению электрических проводов кабеля. Также опасно заклинивание кабеля при неравномерной укладке на барабан лебедки, вследствие чего барабан может застопориться. Недостаточное качество укладки кабеля часто возникает из-за образования щелей у реборд барабана и заклинивания в них витков кабеля последующих слоев, что в итоге может привести к полной остановке лебедки и, соответственно, к отказу всей системы всплытия-погружения и к пропуску данных временных рядов параметров состояния морской среды. Другая проблема заключается в том, что сильное течение может притопить громоздкий профилирующий носитель. Для уменьшения этого эффекта увеличивают плавучесть профилирующего носителя и, соответственно, повышают мощность лебедки, что приводит к необходимости подачи электропитания с берега.
Известен сканирующий зонд для работы в океане, выполненный в виде цилиндра, в котором размещены источник питания, блоки измерительных приборов, устройства гидроакустической и радиосвязи, устройство управления, и имеющий лебедку с фалом, соединенным с якорем. Внутри корпуса помещена система плавучести в виде жесткой оболочки с верхним клапаном стравливания газа и нижним клапаном впуска воды. Жесткая оболочка соединена трубкой с механизмом разрушения капсул с гидрореагентом. Лебедка размещена в корзине, с одной стороны шарнирно соединенной с корпусом зонда, а с другой - с подпружиненным штоком генератора подзарядки источника питания. Технический результат заключается в расширении функциональных возможностей зонда и в увеличении ресурса его работы [RU 2445229 С1, 20.03.2012]. При этом лебедка используется только для подтягивания зонда к месту постановки после стравливания газа и срабатывания нижнего клапана впуска воды для придания зонду отрицательной плавучести. Главным недостатком зонда является сложность конструкции, - в основной состав системы погружения-всплытия входит много механических устройств: механизм протяжки и разрушения капсул с гидрореагентом, жесткая оболочка внутри корпуса, клапан стравливания газа, клапан впуска воды, плавающая корзина с лебедкой. Причем плавающая корзина с лебедкой расположена снаружи корпуса, поэтому для эффективного управления системой погружения-всплытия требуется соединить кабелем лебедку, блок измерительных приборов и устройства управления, установленные в указанном корпусе.
Известны подводные профилирующие носители аппарат Thetis (http://wetlabs.com/thetis-profiler) и поднимающееся/спускающееся устройство [US 20140348593 А1, 27.11.2014], снабженные несколькими отдельными модулями, в том числе океанологических измерительных датчиков, блоками плавучести, электрической подводной лебедкой, размещенными на общей раме. Эти носители предназначены для использования в составе заякоренной притопленной станции. На нижнем конце троса лебедки закреплен донный якорь. Намотка/размотка троса позволяет опускать/поднимать профилирующий зонд, который предназначен для зондирований от дна до поверхности раздела вода-воздух. Электропривод лебедки Thetis (http://wetlabs.com/thetis-profiler) может работать в двух режимах: с постоянной или с переменной скоростью вращения мотора. В первом случае размотка и намотка троса на барабан происходят равномерно. Этот режим хорошо работает в спокойной воде при отсутствии поверхностных волн. При включении второго режима скорость вращения мотора регулируется так, чтобы поддерживать постоянное натяжение троса. Это важно, когда под воздействием морского волнения возникают ускорения профилирующей системы. Недостатками указанных подводных профилирующих носителей измерительных датчиков Thetis и подводного поднимающегося/спускающегося устройства [US 20140348593 А1, 27.11.2014] являются серьезные ограничения из-за плохой обтекаемости в потоке воды. Лебедки, выполненные в виде отдельных модулей, слишком тяжелы и громоздки, их приходится устанавливать на массивную раму, снабженную элементами плавучести. Из-за плохой обтекаемости приходится дополнительно увеличивать плавучесть. При этом значительно увеличиваются затраты энергии на работу лебедки и на погружение профилирующего носителя.
Наиболее близкой по технической сущности к заявленному подводному лебедочному зонду является автономная позиционная станция для зондирования водной среды по глубине, содержащая контейнер с комплексом измерительных модулей, системой приема-передачи информации, выполненной с аппаратурой радиосвязи, бортовой системой управления, системой электропитания, системой всплытия-погружения, выполненной с лебедкой, а также буйреп, соединенный одним своим концом с якорем, при этом она снабжена балластными грузами для дифферентовки и установленной на контейнере полой штангой, через которую пропущен буйреп, соединенный вторым своим концом с лебедкой системы всплытия-погружения, а система приема-передачи информации снабжена аппаратурой гидроакустической связи [RU 2096247 С1, 20.11.1997]. Недостатками данной станции является то, что система всплытия-погружения размещена в негерметичном отсеке контейнера, то есть требуется соединить ее кабелем с бортовой системой управления, и для лебедки не предусмотрен тросоукладчик для намотки большой длины троса на приемный барабан.
Позднее эти же авторы усовершенствовали систему всплытия-погружения плавучим тросом, который наматывался на ролики, при этом один конец троса крепили к якорю, другой - к бую, а один из роликов соединялся с редуктором реверсивного электродвигателя, размещаемого на позиционной станции [RU 2184674 C1, 09.01.2001]. При работе с этой системой всплытия-погружения реализуется способ перемещения станции, включающий в себя перемотку троса по роликам, при этом отсутствие пробуксовки и самосматывания обеспечивается за счет натяжения троса, выходящего с ролика, создаваемого положительной плавучестью троса и гидродинамическим сопротивлением буя. Также реализуется способ обеспечения живучести системы всплытия-погружения за счет того, что буй под действием отрицательной плавучести буя и положительной плавучести троса никогда не находится на поверхности, а опускается на промежуточную глубину (между поверхностью воды и дном водоема). Недостатком этой системы является то, что она не может находиться на морской поверхности и, как следствие, не может передать данные измерений в оперативном режиме по радиоканалу. Кроме того, как и упомянутые выше аналоги, так и позиционные станции [RU 2096247 С1, 20.11.1997; RU 2184674 С1, 09.01.2001] имеют значительные габариты, сложные механизмы системы всплытия-погружения, требуют для установки станции специального оборудования и не обладают удобством и надежностью механизмов всплытия.
Основной задачей изобретения является устранение плохой обтекаемости автономного подводного зонда в потоке воды в море или в пресноводном водоеме. Зонд должен иметь минимальные габариты, для уменьшения гидродинамического сопротивления и, как следствие, для минимизации энергетических затрат на перемещение зонда под водой, соответственно, для увеличения ресурса автономной работы. Причем автономный подводный зонд должен состоять не из двух или более частей, соединенных под водой кабелем, что снижает надежность системы в целом, а из одного самодостаточного аппарата, в прочном корпусе которого располагается электропривод лебедки, блок батарей, электронный модуль управления, электронные модули датчиков окружающей среды, модем связи. А чувствительные элементы датчиков и антенны для оперативной передачи данных измерений располагались бы на крышке прочного корпуса. А также в целях повышения надежности в конструкции подводной лебедки должна быть решена задача равномерной укладки несущего троса в процессе его намотки на барабан лебедки. Все это является задачами данного изобретения.
Сущность изобретения.
Технический результат заявленного подводного лебедочного зонда для автоматического профилирования водной толщи внутреннего водоема или акватории морского шельфа вплоть до поверхности моря заключается в расширении технических средств, обеспечивающих надежность его функционирования в течение длительного времени за счет его компактной и удобной в использовании конструкции, которая обеспечивает равномерную укладку несущего троса в процессе его намотки на барабан лебедки.
Технический результат достигается тем, что создан подводный лебедочный зонд для автоматического профилирования водной толщи внутреннего водоема или акватории морского шельфа вплоть до поверхности моря, содержащий корпус с комплексом измерительных приборов, системой приема-передачи информации с аппаратурой радиосвязи, системой управления, системой электропитания, системой всплытия-погружения, выполненной с лебедкой, к барабану которой одним концом прикреплен несущий трос, соединенный другим концом с неподвижной или подвижной опорой в воде так, что при разматывании несущего троса с барабана зонд двигается в направлении вверх от опоры под действием собственной положительной плавучести, а при наматывании несущего троса на барабан зонд двигается к опоре, при этом в прочном корпусе, выполненном в виде удобообтекаемой формы, размещен электропривод лебедки, вал которого соединен с валом лебедки, закрепленным посредством радиально-упорного подшипника в крышке прочного корпуса и выходящим из прочного корпуса наружу, а на наружной части вала лебедки установлен барабан с возможностью возвратно-поступательного перемещения вдоль вала лебедки посредством поворотного сухаря, установленного непосредственно в барабане и находящегося в зацеплении с двунаправленной замкнутой винтовой канавкой, выполненной на поверхности вала лебедки, причем барабан застопорен от вращения вокруг вала лебедки с помощью как минимум одной направляющей, установленной на крышке прочного корпуса и свободно проходящей через тело барабана параллельно оси вала лебедки, где направляющая выполняет функцию поддержки наружного конца вала лебедки посредством подшипника, на наружном конце вала лебедки за поддерживающим подшипником закреплено водило, на котором размещены направляющий ролик для несущего троса, один конец которого прикреплен к барабану, и канал для прохождения этого троса, причем водило установлено так, что оно вращается вместе с валом лебедки, что обеспечивает наматывание несущего троса на барабан и его разматывание с барабана в процессе реверсивных перемещений барабана вдоль вала лебедки, а наружные элементы лебедки защищены ограждением, установленным на крышке прочного корпуса, при этом ограждение снабжено клюзом для выхода несущего троса.
Причем вал лебедки одновременно обеспечивает два движения: вращательное движение водила вокруг оси вала лебедки, производя наматывание или разматывание троса с барабана, и возвратно-поступательное движение барабана с помощью поворотного сухаря, установленного в отверстие барабана перпендикулярно его продольной оси и имеющего возможность поворачиваться вокруг своей оси.
А барабан выполняет функцию каретки, обеспечивая условия для равномерной укладки троса, когда совершает реверсивные движения вдоль продольной оси вала лебедки посредством поворотного сухаря, который, перемещаясь по двунаправленной замкнутой винтовой канавке на валу лебедки, создает толкающее усилие на барабан вдоль продольной оси, преобразуя вращение вала лебедки в возвратно-поступательное движение барабана.
Также барабан установлен соосно с валом электропривода, что обеспечивает компактность электрической лебедке и уменьшает силу гидродинамического сопротивления, возникающую при обтекании зонда потоком воды.
А для случая зондирования с плавучего объекта от поверхности моря до глубины зонду придается отрицательная плавучесть, и несущий трос закреплен одним концом на барабане лебедки, а другим концом на плавучей опоре на поверхности моря или на опоре под поверхностью моря, например на объекте, вмороженном в лед.
Краткое описание чертежей.
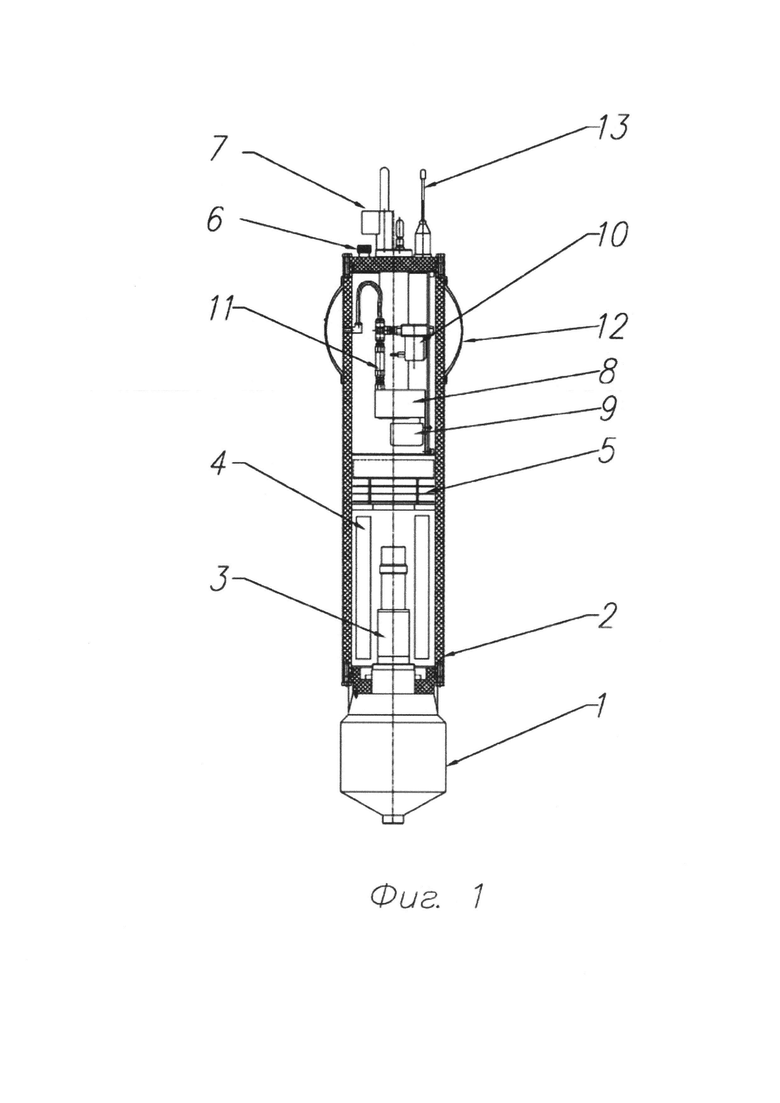
На Фиг. 1 представлен общий вид подводного лебедочного зонда для автоматического профилирования водной толщи внутреннего водоема или акватории морского шельфа вплоть до поверхности моря.
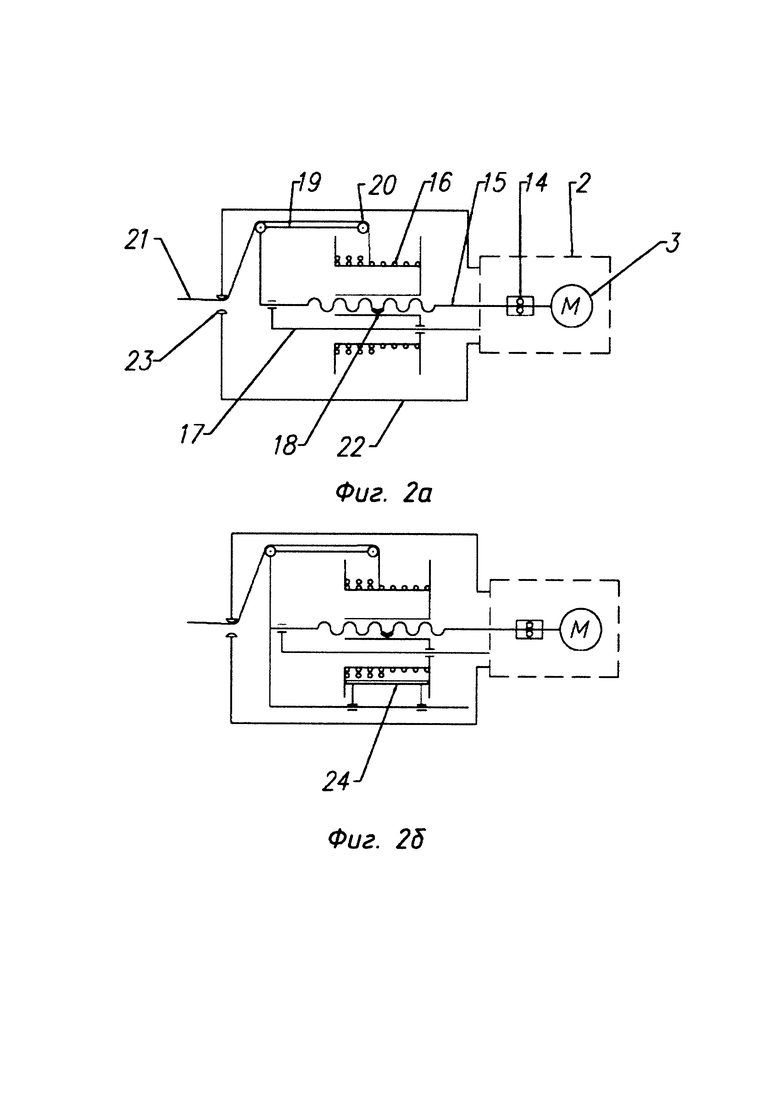
На фиг. 2а представлена кинематическая схема электролебедки подводного лебедочного зонда, на фиг. 2б представлена кинематическая схема электролебедки с опциональным прижимным устройством на барабане для предотвращения перехлеста витков троса.
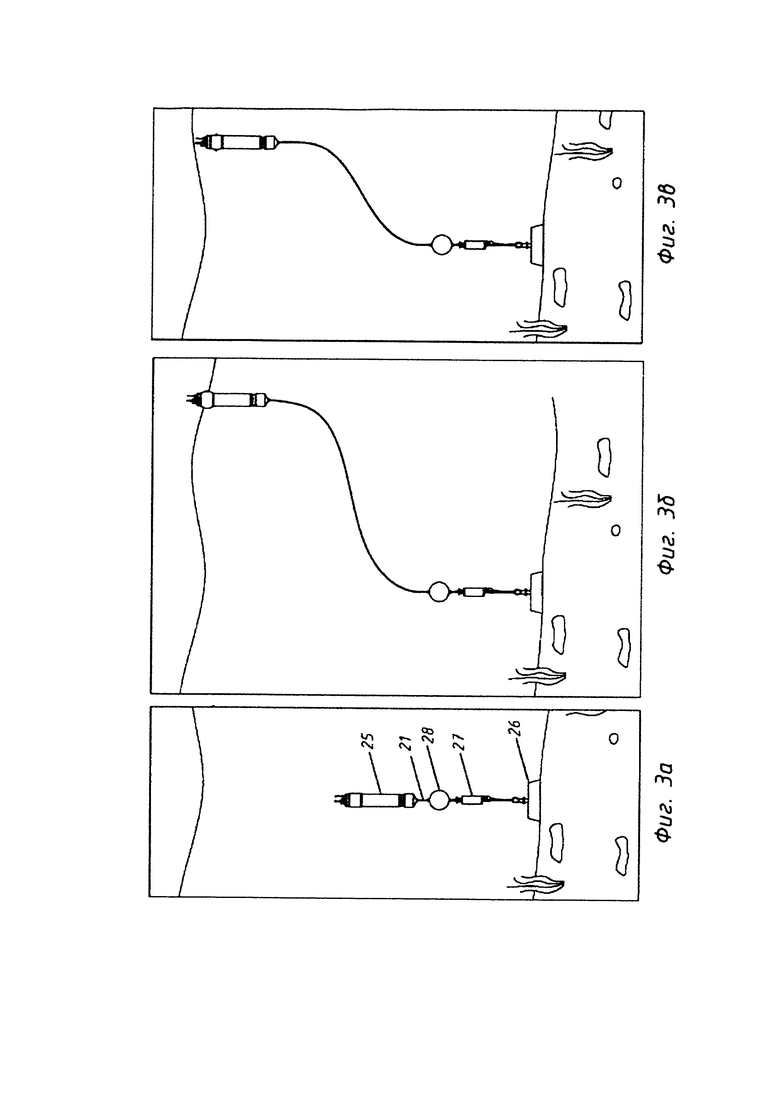
На Фиг. 3а, б, в показаны стадии всплытия-погружения подводного лебедочного зонда в случае его положительной плавучести в воде, когда несущий трос, закреплен одним концом на барабане лебедки, а другим концом на притопленной плавучести.
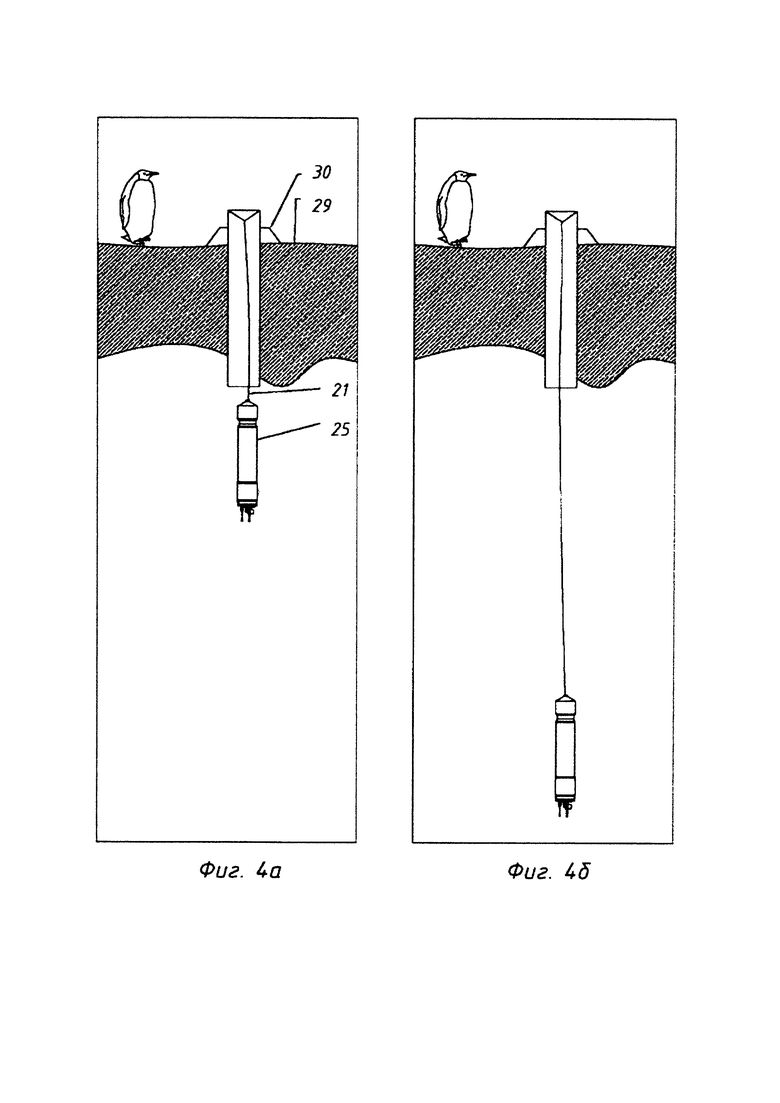
На Фиг. 4а, б показаны стадии погружения подводного лебедочного зонда в случае его отрицательной плавучести, когда трос закреплен одним концом на барабане лебедки, а другим концом на ледовом буе.
Создан подводный лебедочный зонд для автоматического профилирования водной толщи внутреннего водоема или акватории морского шельфа вплоть до поверхности моря (см. Фиг. 1), оснащенный: системой всплытия-погружения с электролебедкой (1), комплексом измерительных приборов, системой приема-передачи информации с аппаратурой радиосвязи, системой управления, системой электропитания. При этом внутри прочного герметичного аппаратурного корпуса (2) удобообтекаемой формы установлены: в вертикальном положении электропривод (3) лебедки, блок батарей (4), микропроцессорная система управления и контроля (5). На крышке корпуса (2) установлен датчик наружного давления (6) и, как минимум, один датчик водной среды (7). Электролебедка (1) снабжена вертикально установленным барабаном (16).
В подводном лебедочном зонде опционально установлены:
- комплекс пневматического оборудования всплытия-погружения в составе пневматического насоса (8), электропривод пневматического насоса (9), электроклапан (10), запорный клапан (11), наружная расширительная емкость (12), терминал связи, включающий модуль внешних коммуникаций, входящий в состав микропроцессорной системы управления и контроля (5), и антенны (13) на крышке корпуса (2).
Вал электропривода (3) (см. Фиг. 2а) соединен с валом лебедки (15), например, при помощи шпонки, и выходит из прочного корпуса (2) наружу. На наружной части вала лебедки (15) установлен барабан (16). Вал лебедки (15) установлен на радиально-упорном подшипнике (14) в крышке корпуса (2). Между валом лебедки (15) и крышкой корпуса установлено уплотнение для герметизации корпуса (2) от внешней среды. На поверхности вала лебедки (15) размещена замкнутая двунаправленная (перекрестная) винтовая канавка.
Вал лебедки (15) свободно проходит через центральное отверстие в барабане (16), причем барабан (16) не закреплен на наружном валу лебедки (15). Барабан (16) установлен с возможностью возвратно-поступательного перемещения вдоль вала лебедки (15). Барабан (16) ограничен от вращения вокруг оси вала лебедки (15) как минимум одной направляющей (17), параллельной оси барабана и зафиксированной на крышке корпуса (2). Направляющие (17) выполняют функцию поддержки второго конца вала лебедки (15) с помощью поддерживающего подшипника, установленного на концах направляющих (17).
Средством для возвратно-поступательного перемещения барабана (16) вдоль продольной оси служит поворотный сухарь (18), установленный в отверстии, перпендикулярном продольной оси барабана (16). Поворотный сухарь (18) находится в зацеплении с двунаправленной замкнутой винтовой канавкой на валу лебедки (15). Поворотный сухарь (18) может вращаться вокруг своей оси и имеет возможность поворота при переходе резьбы канавки с левой на правую и обратно на концах вала лебедки (15).
На конце вала лебедки (15), за поддерживающим подшипником, установлено водило (19), вращающееся вместе с валом лебедки (15). На водило (19) установлен направляющий ролик (20), и оно снабжено каналом для прохождения несущего троса (21). На крышке корпуса (2) установлено ограждение (22), защищающее внешние элементы лебедки и оборудованное клюзом (23) для выхода несущего троса.
При вращении наружного вала лебедки (15) барабан (16) совершает возвратно-поступательные движения вдоль направляющих (17). При этом водило (19), вращающееся вокруг барабана (16), в зависимости от направления своего вращения производит наматывание или сматывание несущего троса (21) с барабана (16). Несущий трос (21) проходит через клюз (23) внутрь ограждения (22) далее по роликам (20) и каналу водила (19) наматывается на барабан (16).
Для повышения надежности работы лебедки опционально предусмотрено прижимное устройство (24) (см. Фиг. 2б). При ослаблении натяжения несущего троса (21) прижим предотвращает перехлест витков троса на барабане (16).
Подробное описание осуществления изобретения.
Подводный лебедочный зонд предназначен для автоматического профилирования приповерхностного и придонного слоев внутреннего водоема или моря в заданной географической точке или с плавучей платформы, например с дрейфующей льдины.
Наружный вал лебедки (15) (см. Фиг. 2а) и водило (19) вращаются одновременно, при этом барабан (16), находящийся в зацеплении с двунаправленной замкнутой винтовой канавкой, размещенной на поверхности вала лебедки (15), с помощью поворотного сухаря (18), совершает реверсивные осевые перемещения. Несущий трос (21) пропущен через клюз (23), уложен на ролики (20) и закреплен одним концом на барабане (16). Благодаря реверсивным осевым движениям барабана (16) и одновременно вращению водила (19) несущий трос (21) равномерно наматывается на барабан (16) или разматывается с барабана (16).
В варианте работы в составе донной станции подводный лебедочный зонд (25) (см. Фиг. 3) имеет положительную плавучесть в воде, находясь в вертикальном положении датчиками вверх, при этом лебедка (1) находится в нижней части зонда (25). Второй конец несущего троса (21) прикреплен либо к донному якорю (26), либо к опоре, например притопленной плавучести (28), установленной над размыкателем (27) донного якоря (26).
В подводный лебедочный зонд (25), присоединенный несущим тросом (21) к донному якорю (26) или протопленной плавучести (28), опционально устанавливается пневматический насос (8), который предназначен для перекачки воздуха между внутренним прочным корпусом (2) зонда и наружной расширительной емкостью (12): при всплытии (см. Фиг. 3а, б) для увеличения плавучести зонда за счет закачки воздуха из корпуса в наружную расширительную емкость (12), а при погружении (см. Фиг. 3в) для уменьшения плавучести зонда за счет откачки воздуха из наружной расширительной емкости (12) внутрь корпуса (2). В этом зонде опционально устанавливается терминал связи с антеннами (13) для передачи данных измерений параметров водной среды, например, по радиоканалу или по каналу мобильной телефонной связи при всплытии зонда на поверхность воды (см. Фиг. 3б). При всплытии наружная расширительная емкость (12), надутая воздухом, обеспечивает возвышение антенн (13) над поверхностью воды.
В другом варианте эксплуатации, когда зонд (25) свешивается на тросе с льдины (29) (см. Фиг. 4а, б), второй конец несущего троса (21) прикреплен к опоре (30) на льдине. Причем зонд подвешивается на тросе так, чтобы датчики находились в нижней части зонда (25), а лебедка (1) - в верхней части зонда (25). В таком варианте эксплуатации зонд имеет небольшую отрицательную плавучесть.
При погружении и подъеме зонд проводит измерения водной среды с помощью датчика (7). По достижении заданного горизонта, определяемого по датчику давления (6), меняется направление вращения мотора электропривода (3), вследствие чего меняется направление вращения барабана (16) лебедки (1). Таким образом, периодически наматывая и разматывая несущий трос (21), подводный лебедочный зонд то поднимается, то опускается в водной толще, проводя измерения вертикальных распределений параметров водной среды.
Проведенные исследования показали, что при вращении наружного вала лебедки (15) на барабане (16), совершавшем возвратно-поступательные движения вдоль направляющих (17), при наматывании и сматывании несущего троса (21) с помощью водила (19), вращающегося вокруг барабана (16), даже при ослаблении натяжения троса (21), не создавалось перехлеста витков троса и петлеобразования, и была отмечена равномерная укладка троса (21), что свидетельствует о надежности заявленной конструкции подводного лебедочного зонда для автоматического профилирования водной толщи внутреннего водоема или акватории морского шельфа вплоть до поверхности моря. А компактность зонда и удобство в его эксплуатации достигаются благодаря компоновке оборудования зонда - размещению в прочном корпусе: электропривода лебедки, блока батарей, электронного модуля управления, электронных модулей датчиков окружающей среды, модема связи, а также размещению на крышке прочного корпуса: чувствительных элементов датчиков и антенны для оперативной передачи данных измерений.
| название | год | авторы | номер документа |
|---|---|---|---|
| Автономный дрейфующий профилирующий океанологический буй | 2015 |
|
RU2609849C1 |
| СПОСОБ ПОСТАНОВКИ ПРИТОПЛЕННОГО ОКЕАНОЛОГИЧЕСКОГО БУЯ | 2009 |
|
RU2404081C1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2013 |
|
RU2546784C2 |
| ЗОНДИРУЮЩИЙ КОМПЛЕКС | 2023 |
|
RU2828192C1 |
| ПРОФИЛОГРАФ ДЛЯ ВЕРТИКАЛЬНОГО ЗОНДИРОВАНИЯ МОРСКОЙ СРЕДЫ | 2012 |
|
RU2499280C2 |
| Автономная гидрофизическая станция | 2021 |
|
RU2783188C1 |
| АКВАЗОНД ЦИКЛИРУЮЩЕГО РЕЖИМА | 2006 |
|
RU2325674C1 |
| МОБИЛЬНЫЙ ПОДВОДНЫЙ ЖИЛОЙ ДОМ | 2009 |
|
RU2399550C1 |
| ГЛУБОКОВОДНЫЙ ДОБЫЧНОЙ КОМПЛЕКС И ТЕЛЕУПРАВЛЯЕМЫЙ ПОДВОДНЫЙ РОБОТ | 2002 |
|
RU2214510C1 |
| САМОХОДНОЕ ПОДВОДНОЕ КАФЕ | 2007 |
|
RU2348565C1 |
Изобретение относится к области подводной робототехники, в частности к технике изучения и освоения морей, океанов и внутренних водоемов, к автономным и автоматизированным подводным профилирующим зондам. Подводный лебедочный зонд содержит корпус с комплексом измерительных приборов, системой приема-передачи информации с аппаратурой радиосвязи, системой управления, системой электропитания, системой всплытия-погружения, выполненной с лебедкой, к барабану которой одним концом прикреплен несущий трос, соединенный другим концом с неподвижной или подвижной опорой в воде так, что при разматывании несущего троса с барабана зонд двигается в направлении вверх от опоры под действием собственной положительной плавучести, а при наматывании несущего троса на барабан зонд двигается к опоре. При этом в прочном корпусе, выполненном в виде удобообтекаемой формы, размещен электропривод лебедки, вал которого соединен с валом лебедки, закрепленным посредством радиально-упорного подшипника в крышке прочного корпуса и выходящим из прочного корпуса наружу. На наружной части вала лебедки установлен барабан, с возможностью возвратно-поступательного перемещения вдоль вала лебедки посредством поворотного сухаря, установленного непосредственно в барабане и находящегося в зацеплении с замкнутой винтовой канавкой, выполненной на поверхности вала лебедки. Барабан застопорен от вращения вокруг вала лебедки с помощью как минимум одной направляющей, установленной на крышке прочного корпуса и свободно проходящей через тело барабана параллельно оси вала лебедки, где направляющая выполняет функцию поддержки наружного конца вала лебедки посредством подшипника. На наружном конце вала лебедки за поддерживающим подшипником закреплено водило, на котором размещены направляющий ролик для несущего троса, один конец которого прикреплен к барабану, и канал для прохождения этого троса. Водило установлено так, что оно вращается вместе с валом лебедки, что обеспечивает наматывание несущего троса на барабан и его разматывание с барабана в процессе реверсивных перемещений барабана вдоль вала лебедки. Технический результат изобретения заключается в расширении технических средств, обеспечивающих надежность функционирования подводного лебедочного зонда в течение длительного времени за счет его компактной и удобной в использовании конструкции, которая обеспечивает равномерную укладку несущего троса в процессе его намотки на барабан лебедки. 1 з.п. ф-лы, 8 ил.
1. Подводный лебедочный зонд для автоматического профилирования водной толщи внутреннего водоема или акватории морского шельфа вплоть до поверхности моря, содержащий корпус с комплексом измерительных приборов, системой приема-передачи информации с аппаратурой радиосвязи, системой управления, системой электропитания, системой всплытия-погружения, выполненной с лебедкой, к барабану которой одним концом прикреплен несущий трос, соединенный другим концом с неподвижной или подвижной опорой в воде так, что при разматывании несущего троса с барабана зонд двигается в направлении вверх от опоры под действием собственной положительной плавучести, а при наматывании несущего троса на барабан зонд двигается к опоре, отличающийся тем, что в прочном корпусе, выполненном в виде удобообтекаемой формы, размещен электропривод лебедки, вал которого соединен с валом лебедки, закрепленным посредством радиально-упорного подшипника в крышке прочного корпуса и выходящим из прочного корпуса наружу, при этом на наружной части вала лебедки установлен барабан с возможностью возвратно-поступательного перемещения вдоль вала лебедки посредством поворотного сухаря, установленного непосредственно в барабане и находящегося в зацеплении с замкнутой винтовой канавкой, выполненной на поверхности вала лебедки, причем барабан застопорен от вращения вокруг вала лебедки с помощью как минимум одной направляющей, установленной на крышке прочного корпуса и свободно проходящей через тело барабана параллельно оси вала лебедки, где направляющая выполняет функцию поддержки наружного конца вала лебедки посредством подшипника, на наружном конце вала лебедки за поддерживающим подшипником закреплено водило, на котором размещены направляющий ролик для несущего троса, один конец которого прикреплен к барабану, и канал для прохождения этого троса, причем водило установлено так, что оно вращается вместе с валом лебедки, это обеспечивает наматывание несущего троса на барабан и его разматывание с барабана в процессе реверсивных перемещений барабана вдоль вала лебедки, а наружные элементы лебедки защищены ограждением, установленным на крышке прочного корпуса, при этом ограждение снабжено клюзом для выхода несущего троса.
2. Подводный лебедочный зонд по п. 1, отличающийся тем, что барабан установлен соосно с валом электропривода, что обеспечивает компактность электрической лебедке и уменьшает силу гидродинамического сопротивления, возникающую при обтекании зонда потоком воды.
| АВТОНОМНАЯ ПОЗИЦИОННАЯ СТАНЦИЯ ДЛЯ ЗОНДИРОВАНИЯ ВОДНОЙ СРЕДЫ ПО ГЛУБИНЕ, СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ВОДНОЙ СРЕДЫ ЭТОЙ СТАНЦИЕЙ И СПОСОБ ПЕРЕДАЧИ ЕЮ ИЗМЕРЕННЫХ ПАРАМЕТРОВ | 1994 |
|
RU2096247C1 |
| СКАНИРУЮЩИЙ ЗОНД ДЛЯ РАБОТЫ В ОКЕАНЕ | 2010 |
|
RU2445229C1 |
| Кабельная лебедка | 1978 |
|
SU715440A1 |
| Лебедка | 1986 |
|
SU1446097A1 |
| Измерительная канатная лебедка | 1983 |
|
SU1322977A3 |
| US 20140348593 A1, 27.11.2014. | |||

