Изобретение относится к технике изучения и освоения океана, к автономным автоматизированным подводным аппаратам заякоренного типа - буям. Способ использует разнонаправленность действия сил водоизмещения и веса, воздействующих на аппарат по вертикали и разворачивающих тросовую связь элементов сборки в процессе погружения.
Известны различные способы постановки притопленных аппаратов, сканирующих по вертикальной тросовой линии [1, 2], которую последовательно разворачивают в процессе постановки между якорем и поплавком, погружая их с плавсредства в процессе его дрейфа с помощью специальных судовых устройств.
Недостатками известного решения являются: трудоемкость способа, неточность постановки, вызванная дрейфом судна носителя, сносом тросовой линии внутренними течениями, и дороговизна судового времени в виду длительности процесса.
Наиболее близким к предлагаемому решению является способ постановки притопленного океанологического буя [3], заключающийся в последовательном тросовом соединении посредством троса-буйрепа и выстраивании погруженной тросовой вертикали из якоря с размыкателем, измерительного зонда, включающего привод зонда, через который по оси зонда пропускают буйреп, соединяя его с притопленным обтекаемым поплавком.
Известный способ также не свободен от недостатков. Он требует много судового времени при выполнении постановки и особенно трудоемок при волнении в процессе последовательного погружения элементов системы буя, что не гарантирует положения якоря и развертывания тросовой лини буйрепа в заданной точке акватории в виду дрейфового сноса судна и сноса линии буйрепа. Кроме того, неточность определения глубины положения якоря ввиду дрейфа, следовательно, глубины положения поплавка относительно уровня моря искажает гидрофизические измерения их координацию относительно уровня моря, получаемые зондом, что вызвано не только дрейфом судна, но и неточностью отображения рельефа дна в процессе эхолотирования.
Предлагаемое решение позволяет избежать указанных недостатков, связанных с неточностью постановки, трудоемкостью, дороговизной и сложностью выхода на рабочую глубину поплавка.
Указанный эффект достигается тем, что в известном способе постановки притопленного океанологического буя, заключающийся в последовательном тросовом соединении посредством троса-буйрепа и выстраивании погруженной тросовой вертикали из якоря с размыкателем, измерительного зонда, включающего привод зонда, через который по оси зонда пропускают буйреп, соединяя его с притопленным обтекаемым поплавком, предварительно определяют путем зондирования глубину акватории постановки, исходя из которой определяют длину троса основной и подповерхностной части буйрепа, равную рабочему горизонту, которую укладывают на барабан лебедки, застопоренный тормозом, управляемым от датчика давления, соединяя через лебедку трос буйрепа с поплавком, тогда как основную часть троса буйрепа пакуют на бифилярную вьюшку, совмещая начало намотки с серединой основной части буйрепа, после этого последовательное соединение: якорь с размыкателем, паковка бифилярной вьюшки, зонд и поплавок с лебедкой, компонуют в сборку, скрепляя их механической связью с замком, управляемым микропроцессором, и погружают с плавсредства в выбранную точку акватории, при этом погружающуюся под действием якоря и поплавка компоновку разделяют по команде микропроцессора, размыкая замок на задаваемой глубине и разматывая вьюшку в противоположные стороны до момента касания якорем дна, после чего паковка вьюшки продолжает разматывать только вверх до достижения рабочего горизонта, где заторможенный барабан лебедки растормаживают по команде датчика давления, а при достижении рабочей глубины снова стопорят тормозом по команде датчика.
Возможность реализации
Сущность способа разъясняется на схематичных чертежах. На Фиг.1 схематично показана сборка океанологического буя с зондом, готовая к погружению. Здесь: обтекаемой формы поплавок 1, а на нем датчик давления 2, лебедка 3, механическая связь 4 и ее замок 5; механизм привода зонда 6 в прочном корпусе измерительного зонда 7, в котором размещены также океанологические датчики, микропроцессор, электропитание, акустическая связь и др. 8; размыкатель 9 акустического типа крепится к анкеру якоря 10 и связывает бифилярную вьюшку 11 с буйрепом 12, проходящим через ось корпуса зонда 7 для снижения гидродинамического воздействия. Механическая связь 4 удерживает сборку: поплавка 1, зонда 7 и вьюшки 11 в совокупности с якорем 10 с помощью замка 5, который управляется программой, так что исследователь задает глубину его расстыковки.
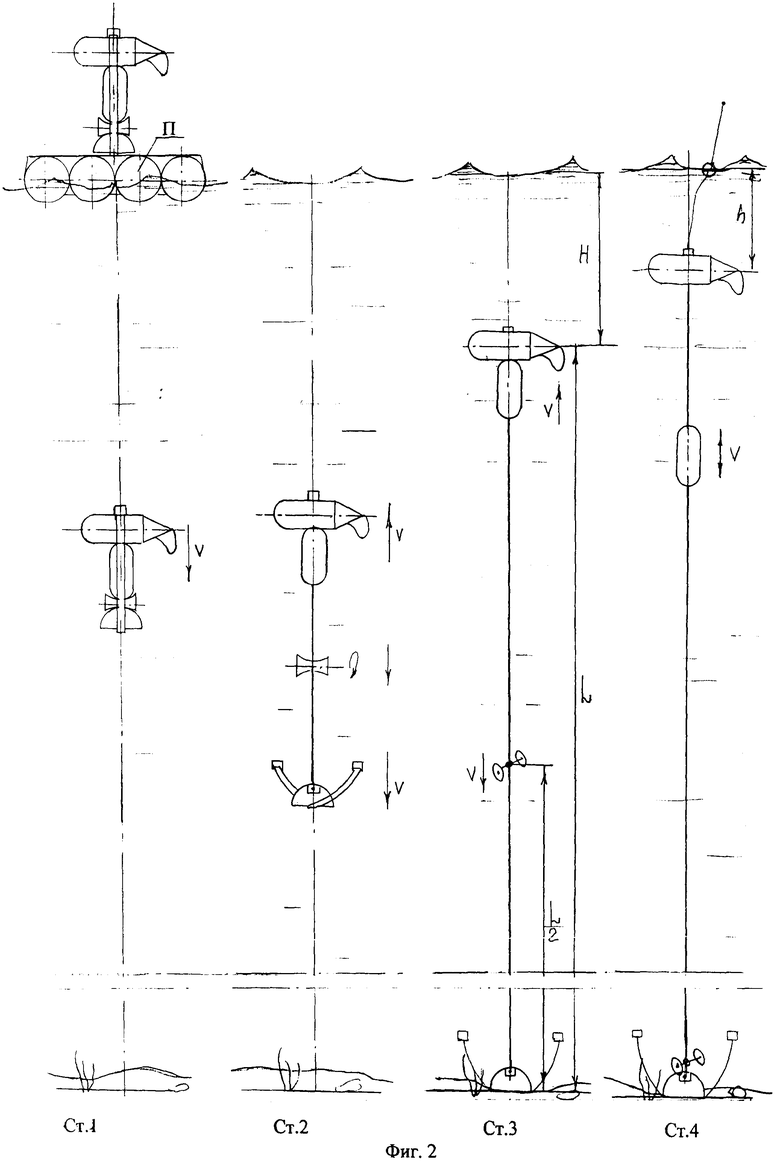
Способ постановки осуществляют следующим образом. На Фиг.2 показаны 4-е стадии. Сначала определяют ориентировочную максимальную глубину акватории в точке постановки с помощью судового эхолота - максимальную длину буйрепа:
M=L+H,
где Н (Фиг.2 ст.3) - рабочий горизонт - величина максимального заглубления поплавка с учетом точности определения общей глубины, сноса и дрейфа, а также переменности рельефа дна, основной участок вертикали L - длина основного участка буйрепа с учетом наклона под влиянием подповерхностного течения. Из условия проникновения влияния поверхностных волн и исследовательской задачи назначают величину заглубления поплавка (Фиг.2 ст.4) h<Н, как граничной точки сканирования зонда. Величины h, Н и L отсчитываются от местного значения уровня моря.
Скомпонованную сборку помещают на понтон П (или судно) (Фиг.2 ст.1) и буксируют к месту постановки в заданную точку акватории, где перегружают в воду. Под действием преобладающего веса якоря 10 (Фиг.1) над водоизмещением сборки она начинает тонуть и тем быстрее, чем больше разница сил веса и водоизмещения. На глубине, заданной программой исследователя, срабатывает замок 5 и раскрывается связь 4, освобождая элементы сборки (Фиг.2 ст.2). С этого момента поплавок с зондом начинают двигаться вверх, а якорь тонуть, при этом вьюшка, вращаясь, распускает буйреп в обе стороны вверх и вниз (Направления движения показаны стрелкой «V»). Нижний конец троса буйрепа прикреплен через размыкатель 9 (Фиг.1) к балласту якоря, а верхний конец его пропущен через ось корпуса зонда (чтобы исключить ассиметричное обтекание в процессе движения) и уложен на барабан лебедки 3 (Фиг.1), через которую передает усилие на поплавок 1 (Фиг.1). Достигнув дна, якорь останавливается, а зонд с поплавком поднимаются до горизонта Н, где по команде датчика давления 2 (Фиг.1) растормаживается барабан лебедки 3 (Фиг.1) и зонд 7 с поплавком 1 (Фиг.1) поднимаются до глубины h, где снова по команде датчика давления 2 (Фиг.1) микропроцессор застопорит барабан лебедки 3 (Фиг.1). С этого момента буй считается установленным, выпускает радиомаяк и приступает к программной работе, выполняя измерения параметров среды, в процессе сканирования по тросу буйрепа (Фиг.2 ст.4). После выполнения программы исследований с судна обеспечения подается акустическая команда на акустический размыкатель 9 (Фиг.1). Он срабатывает и отдает буйреп. Буй всплывает и извлекается для регламентных работ и перезарядки, оставляя якорь 10 на дне.
Вышеперечисленные существенные признаки позволяют обеспечить способ постановки океанологического зонда в заданную точку акватории без длительного контакта с судном, что позволяет избежать сноса от дрейфа и искривления тросовой вертикали, т.е. без упомянутых недостатков, следовательно, уменьшить трудоемкость, сократить судовое время и расходы.
Реальное воплощение предлагаемого способа возможно с использованием как судна носителя с грузовой стрелой, так и понтона с наклонным слипом для перегрузки в воду сборки, при этом понтон может буксироваться маломерным судном, если позволяет синоптическая обстановка. Поплавок 1 может быть изготовлен из сферопластика типа «Синтактик» или полым стальным по типу отводящих буев в судостроении. Выбор типа поплавка определяется соображениями прочности, т.е. рабочей глубиной и сроком использования. Для связи 4 компоновки может быть использована простая металлическая лента из поделочной стали с защитным окрашиванием. Расположенный на ней замок 5 электромагнитного типа, управляемый микропроцессором. В качестве лебедки 3 используют барабан обычной дисковой вьюшки, снабженной электрическим фрикционным тормозом. Привод 6 может быть выполнен по типу привода [2] на основе безколлекторного электродвигателя с неодимовыми магнитами и высоким КПД в широком диапазоне нагрузок. Измерительный зонд размещают в прочном корпусе 7, для чего можно использовать сферический корпус из АМГ-6 с глубоким анодированием, с цилиндрической проставкой и гермовводами, где размещается механизм привода троса буйрепа, пропущенного через корпус, микропроцессор, электропитание, датчики: СТД, растворенного кислорода, CO2 и другие измерительные приборы 8. Размыкатель 9, например, типа АГАР-ЭХО разработки ОКБ ОТ соединяют с анкером якоря 10, которым может служить бетонный блок. В качестве датчика давления 2 может быть выбран тензодатчик фирмы «GE DRUK», а датчик кислород - «SBE43», датчик СТД - «FSI Excell» и пр. В качестве микропроцессора используют процессор «Atmel Mega 128». Для источника питания можно употребить литий-ионные аккумуляторы. Глубину акватории можно зондировать судовым эхолотом типа «Furuno».
При использовании понтона с наклонным слипом или стрелой необходимо водоизмещение примерно 3 т и маломерное судно для буксирования, но может быть использовано и исследовательское судно типа «Профессор Штокман».
Источники информации
1. Kenneth W. Dherty, Jon M. Toode, Daniel E. Frye. Moored water profiling apparatus, US Patent №5,869,756. Feb. 9, 1999.
2. А.Г.Островский, А.Г.Зацепин, В.А.Деревнин, С.С.Низов, С.Г.Поярков, А.Л.Цибульский, Д.А.Швоев. Заякоренная автоматическая измерительная система «Аквазонд» для вертикального профилирования морской среды. Океанология, 2008, том 48, №2, с.297-306.
3. Деревнин В.А., Зацепин А.Г., Островский А.Г. Швоев Д.А. Аквазонд циклирующего режима. Патент RU 2325674 С1, (2006/01).
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ФУНКЦИОНИРОВАНИЯ И ПОСТАНОВКИ ПРИТОПЛЕННОГО ОКЕАНОЛОГИЧЕСКОГО БУЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2012 |
|
RU2529940C2 |
| АКВАЗОНД ЦИКЛИРУЮЩЕГО РЕЖИМА | 2006 |
|
RU2325674C1 |
| Подводный лебедочный зонд | 2017 |
|
RU2642677C1 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ СТАНЦИЯ ДЛЯ ГЕОЛОГИЧЕСКОГО МОНИТОРИНГА АКВАТОРИЙ | 2014 |
|
RU2566599C1 |
| Автономный дрейфующий профилирующий океанологический буй | 2015 |
|
RU2609849C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСНЫХ ДАННЫХ О СОСТОЯНИИ ОКЕАНА | 2004 |
|
RU2282217C1 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СТАНЦИЯ ДЛЯ СЕЙСМОРАЗВЕДКИ И СЕЙСМОЛОГИЧЕСКОГО МОНИТОРИНГА | 2014 |
|
RU2572046C1 |
| ПОДВОДНАЯ ГЕОФИЗИЧЕСКАЯ СТАНЦИЯ | 2010 |
|
RU2435180C1 |
| ПОДВОДНАЯ ОБСЕРВАТОРИЯ | 2013 |
|
RU2546784C2 |
| ПРОФИЛОГРАФ ДЛЯ ВЕРТИКАЛЬНОГО ЗОНДИРОВАНИЯ МОРСКОЙ СРЕДЫ | 2012 |
|
RU2499280C2 |
Изобретение относится к технике изучения океана с помощью автономных и автоматических подводных аппаратов. Способ заключается в последовательном тросовом соединении посредством буйрепа и выстраивании погруженной тросовой вертикали из якоря с размыкателем, измерительного зонда, включающею привод зонда, через который по его оси пропускают буйреп, соединении его с притопленным обтекаемым поплавком через управляемую от датчика давления лебедку. Основную часть буйрепа пакуют на бифилярную вьюшку, которую помещают между якорем и зондом. Затем соединение собирают в сборку при помощи механической связи, снабженной управляемым замком, и транспортируют в заданную точку акватории, глубину которой предварительно измеряют для определения длины буйрепа, рабочего горизонта и заглубления поплавка. Погружая сборку, управляют глубиной расстыковки замка, разделением сборки и развертыванием тросовой вертикали в океанской толще точно в заданной точке. Обеспечивается точность постановки, исключаются снос, дрейф и кривизна тросовой вертикали, ввиду отсутствия контакта с судном в процессе постановки. 2 ил.
Способ постановки притопленного океанологического буя, заключающийся в последовательном тросовом соединении посредством троса-буйрепа и выстраивании погруженной тросовой вертикали из якоря с размыкателем, измерительного зонда, включающего привод зонда, через который по оси зонда пропускают буйреп, соединяя его с притопленным обтекаемым поплавком, отличающийся тем, что предварительно определяют, путем зондирования, глубину акватории постановки, исходя из которой, определяют длину троса основной и подповерхностной части буйрепа, равную рабочему горизонту, которую укладывают на барабан лебедки, застопоренной тормозом, управляемым от датчика давления, соединяя через лебедку трос буйрепа с поплавком; основную часть троса буйрепа пакуют на бифилярную вьюшку, совмещая начало намотки с серединой основной части буйрепа, после чего осуществляют последовательное соединение якоря с размыкателем, паковку бифилярной вьюшки, зонда и поплавка с лебедкой, компонуют в сборку, скрепляя их механической связью, снабженной замком, управляемым микропроцессором; погружают с плавсредства в выбранную точку акватории, погружающуюся под действием якоря и поплавка компоновку по команде микропроцессора разделяют, размыкая замок на задаваемой глубине и разматывая вьюшку в противоположные стороны до момента касания якорем дна, после чего паковка вьюшки продолжает разматываться только вверх до достижения рабочего горизонта, где заторможенный барабан лебедки растормаживают по команде датчика давления, а при достижении рабочей глубины снова стопорят тормозом по команде датчика.
| АКВАЗОНД ЦИКЛИРУЮЩЕГО РЕЖИМА | 2006 |
|
RU2325674C1 |
| МОДУЛЬ ПЛАВУЧЕСТИ | 1990 |
|
RU2049016C1 |
| US 4215572 A, 05.08.1980 | |||
| US 5869756 A, 09.02.1999. | |||

