Область техники
Изобретение относится к области вооружений, преимущественно к полностью автоматизированным системам поражения живой силы и техники противника на земле, в водной среде, под водой, в воздухе и космосе.
Предшествующий уровень техники
Известна большая группа видов оружия и систем поражения противника с дистанции с использованием людьми переносного, стрелкового оружия (пистолетов, автоматов, пулеметов), гранатометов.
Эти виды вооружений предполагают наличие людей - операторов, которые переносят их на себе и с их помощью поражают живую силу и технику противника с дистанции.
Дистанция поражения противника ограничена тактико-техническими параметрами стрелкового оружия. Она составляет, как правило, порядка несколько сот метров.
Основными недостатками способов поражения живой силы и техники противника с использованием стрелкового оружия являются:
- низкий коэффициент эффективности попадания в цель поражающих зарядов;
- невозможность применения способа при плохой видимости;
- процесс наведения оружия в цель осуществляется визуально - на глаз - и не позволяет точно вести огонь в условиях динамично протекающего боя, а также с удаленных позиций;
- стрелок, близко расположенный к противнику, имеет плохую защиту и может быть уничтожен ответным огнем.
Это оружие является оружием ближнего боя.
Общеизвестны способы дистанционного поражения противника, заключающиеся в доставке поражающих противника зарядов с использованием самолетов, вертолетов и осуществлении процесса их сброса (бомбометания) на позиции противника.
При достижении поверхности земли сбрасываемые заряды подрываются, поражая живую силу и/или технику противника, находящуюся в непосредственной близости от места их падения на земле.
Такой способ поражения противника позволяет увеличить дистанцию, с которой можно поразить противника и уменьшить время нахождения летчика в опасной зоне - над позициями противника.
Полезная нагрузка может быть доставлена без дозаправки самолета на расстояние до нескольких тысяч километров.
Недостатком способа можно считать высокую вероятность уничтожения самолетов-бомбардировщиков современными средствами противовоздушной обороны с использованием ракет.
Известны различные системы и соответствующие способы поражения противника с использованием ракет. Ракеты можно использовать для поражения, надводных, водных, наземных, воздушных или космических целей.
Ракету можно запустить посредством пусковой установки, расположенной на земле или на военной технике. Ракеты доставляют полезную нагрузку (боевую головку) по воздуху из одной точки пространства и времени в другую точку посредством носителя одноразового применения. Этот процесс может осуществляться поэтапно, например, с отделением ракетоносителя от полезной нагрузки в верхних слоях атмосферы земли.
Полет управляемых ракет, например, баллистических осуществляется в соответствии с заранее написанной программой.
Полет самонаводящейся ракеты осуществляется посредством работы датчиков. В результате обработки информации, поступающей с датчиков, формируются сигналы, корректирующие траекторию полета ракеты в сторону цели.
Полет крылатой или баллистической ракеты может осуществляться в автоматическом режиме по специальной программе и изменяющейся, сложной траектории полета. Цель может при этом находиться на земле, под землей, в воздухе, на воде, под водой или в космосе.
Способ ведения боевых действий с использованием крылатых ракет наиболее эффективен против противника, не располагающего системой спутникового контроля поверхности земли. Без подобной системы сложно своевременно зарегистрировать пуски крылатых ракет и осуществить их перехват с использованием сил противовоздушной обороны.
Процесс доставки полезной нагрузки в виде боевой головки баллистической ракеты осуществляется через космическое пространство на значительном удалении от поверхности земли и на очень высокой скорости. Один ракетоноситель может осуществлять доставку сразу нескольких боевых головок ракеты, предназначенных для поражения различных целей. Большую часть пути скорость ракеты и боевых головок составляет порядка 5-10 тыс. километров в час. Дистанция, с которой может быть поражен противник с помощью баллистической ракеты, практически не ограничена и может достигать 10000 км и более.
За счет высокой скорости и сложной, порой непредсказуемой траектории полета боевой головки баллистической ракеты в воздухе и космосе ее очень сложно сбить с земли посредством другой ракеты-перехватчика или с помощью лазера. Это связано с тем, что априорно не известно, из какой точки поверхности земли или океана, в какое время и по какой цели будет произведена ракетная атака, сколько боеголовок несет ракета. Запуск баллистических ракет может быть осуществлен с подводных лодок, самолетов или поездов, которые обладают способностью менять свое местоположение и наносить ракетно-ядерный удар из не известных для противника районов земной поверхности или океана.
Недостатком способа можно считать возможность регистрации момента запуска баллистической ракеты с использованием спутниковых систем наблюдения.
Противник, узнав о начале ракетного удара, может спастись в укрытии, например в бомбоубежище. Для этого у него может быть достаточный запас времени. От нескольких минут до нескольких десятков минут. Этот запас времени позволяет противнику в ответ запустить свои баллистические ракеты по живой силе и технике противника и привести в боевой режим систему противоракетной обороны.
Недостатком оружия с использованием ядерных зарядов можно считать также большое число негативных последствий от его использования и низкую избирательность. Это оружие тотального уничтожения всего живого.
Ракеты и другие средств поражения живой силы и/или техники противника с воздуха используются в качестве первого этапа ведения военных действий. Затем необходимо проведение наземной боевой операции с использованием большого числа военнослужащих, которых необходимо доставить в различные районы вероятного нахождения противника.
Во время проведения наземной боевой операции с использованием стрелкового оружия атакующая и обороняющаяся стороны несут основные потери. Это связано с тем, что используемые воюющими сторонами виды стрелкового оружия имеют примерно равные параметры. За счет этого шансы на победу воющих сторон уравниваются.
В результате успех на начальной фазе военной операции с использованием высокотехнологичного оружия не гарантирует успешного завершения всей военной операции и достижения конечных целей проведения этих военных действий.
Общеизвестны способы дистанционного поражения противника путем установки мин. Мины могут устанавливаться с земли, воды или с воздуха.
Особенностью способа поражения живой силы и техники противника с использованием мин является то, что подрыв мин осуществляется не сразу, как, например, при падении на землю авиационной бомбы, снаряда или боеголовки ракеты, а с некоторой задержкой. Подрыв заряда осуществляется в тот момент времени, когда противник наступит, наедет или коснется корпусом корабля или подводной лодки мины.
Для увеличения размеров области взаимодействия противника с взрывателем мины на земле применяют так называемые растяжки. Зацепившись за плохо заметную растяжку, противник инициирует подрыв мины (или осколочной гранаты) и попадает в зону поражения.
Недостатками способов минирования области наиболее вероятного нахождения противника являются возможность безопасного приближения противника к минам на расстояние их обнаружения, а также возможное поражение своих вооруженных сил и мирного населения после завершения военного конфликта. Разминирование минных полей является достаточно опасным делом.
Известны способы поражения живой силы противника с использованием химических отравляющих веществ.
Способ позволяет уничтожать живые объекты без разрушения неживых объектов.
Недостаток способа заключается в низкой избирательности и возможности гибели большого числа мирного населения.
Известны способы поражения противника, в которых живой человек - оператор - жертвует своей жизнью, чтобы уничтожить живую силу и/или технику противника. Этот человек (камикадзе или шахид) выполняет следующие основные функции: а) поиск противника (цели); б) сближение с противником; в) его уничтожение.
Преимуществом такого способа поражения противника можно считать;
- возможность избирательного поражения живой силы и техники противника в то время и в том месте, где это может дать наибольший эффект;
- сложность обнаружения оператора оружия, замаскированного под мирных граждан;
- неожиданность для противника начала атаки за счет применения замаскированного под одеждой оружия, например бомбы, выполненной в виде пояса шахида.
Недостаток способа заключается в необходимости собственных потерь в живой силе, а также возможность гибели людей, не являющихся объектами атаки, а случайно оказавшихся в зоне подрыва заряда не направленного типа. Например, мирных граждан той же веры.
В вооруженных конфликтах с непосредственным участием человека и применением перечисленных выше способов ведения боевых действий существенную роль играет так называемый человеческий фактор (личная неприязнь, идеология, религиозный фанатизм, расовая ненависть, зависть, психические отклонения и т.д.).
В результате этих факторов боевые действия часто приобретают нечеловеческую форму. Гибнет большое число не причастных к военному конфликту лиц. Уничтожаются важные объекты инфраструктуры и даже целые города. Экологии наносится большой вред.
Общеизвестны различные конструкции самодвижущихся автоматизированных систем - роботов (прототип), предназначенных для дистанционного обезвреживания всевозможных бомб, мин, а также для поражения живой силы и/или техники противника с дистанции.
Роботы представляют собой самодвижущиеся платформы со средствами дистанционного управления местоположения платформы и различными приспособлениями для уничтожения техники противника или приспособлениями для наведения огнестрельного оружия на цель и ведения огня по живой силе противника.
На подобной платформе могут быть установлены, например, одна или несколько видеокамер, посредством которых оператор, удаленный от робота, осуществляет процессы поиска цели, сближения с ней, наведение оружия в цель, стрельбу из пневматической, водяной пушки или из огнестрельного оружия.
В качестве огнестрельного оружия может использоваться промышленно выпускаемый пулемет, установленный посредством опорно-поворотного устройства на платформе.
Преимущество данного способа поражения живой силы и техники противника заключается в том, что оператор, управляющий роботом, удален с боевой позиции на относительно безопасное расстояние или осуществляет управление роботом из укрытия. Управление роботом может осуществляться по радиоканалу или кабелю.
Основными недостатками роботезированных систем, состоящих из человека-оператора и управляемого робота-манипулятора, можно считать:
- сложность доставки в район вероятного нахождения противника достаточно громоздких и тяжелых роботов;
- требуется большое время для погрузки и выгрузки робота;
- трудоемкую операцию по погрузке и выгрузке роботов осуществляет человек;
- высока уязвимость роботов из-за их больших размеров, их легко обнаружить с большого расстояния и уничтожить;
- сложна и неустойчива конструкция робота с высокорасположенным большим пулеметом;
- робот склонен к опрокидыванию при перемещении по рельефной местности, и после опрокидывания он не способен выполнять действия по уничтожению противника;
- требуется относительно большое время для наведения оружия (громоздкого пулемета) на цель;
- процесс наведения оружия на цель виден противнику издалека;
- низка точность поражения целей из-за высокой, не компенсируемой отдачи при стрельбе.
Известна большая группа электронно-управляемого стрелкового оружия с использованием одноствольных или многоствольных огнестрельных устройств с электроинициируемыми патронами и различными видами полезной нагрузки.
Например, в патенте США №3815271 (кл. F41С 19/12, опубл. 11.06.74) описано техническое решение, в котором обойма пуль размещена в канале ствола и каждая пуля снабжена собственным пороховым зарядом с электровоспламенителем.
Преимущества этого технического решения: небольшие габариты, малый вес за счет отсутствия корпуса магазина и перезаряжающего устройства, высокая скорострельность.
Недостатки: ограниченная дальность стрельбы, которая не регулируется. Огонь может вестись только в одном направлении. Мощность зарядов ограничена конструкцией обоймы, исключающей подрыв следом расположенных зарядов или разрушение электроинициаторов с их электрическими цепями управления. В этом оружии имеет место быть нескомпенсированная отдача, ухудшающая точность стрельбы.
Известно техническое решение, описанное в патенте РФ №2072079. В этом изобретении описано техническое решение многоствольного, многофункционального, замаскированного оружия.
Конструктивно оружие выполнено в виде чемодана или дипломата, внутри которого с одной или нескольких сторон, перпендикулярно по направлению к стенкам, установлены многоствольные патроны с электроинициируемыми зарядами и полезной нагрузкой, например, в виде пуль, ослепляющих, оглушающих или отравляющих противника зарядов, гранат и т.д.
Внутренняя часть такого чемодана остается свободной и может использоваться для переноски ценных предметов или для размещения других предметов или устройств. Стенки чемодана в местах вылета нагрузки делаются легко пробиваемыми.
Применение многоствольных патронов позволяет вести обстрел противника одиночными выстрелами, залпом или программируемыми сериями всевозможных очередей с различной скорострельностью в одну или в различные стороны.
Патроны, расположенные, напротив, с противоположной стороны чемодана, могут быть выполнены с холостыми зарядами повышенной мощности - для компенсации импульса отдачи при стрельбе, например в режиме высокой скорострельности или в режиме выстрела залпом.
Управление работой электроинициаторов патронов осуществляется посредством электронного (микропроцессорного) устройства, связанного с источником питания и органами управления, установленными вблизи ручки чемодана.
Преимущество дистанционного поражения противника с использованием такого оружия - повышенный уровень защищенности стреляющего и возможность неожиданного для противника, опережающего начала ведения огня высокой плотности. Например, в режиме статистического поражения противника, когда целиться, в привычном смысле, в противника нет необходимости. Следует только выпустить в сторону противника серию зарядов, поражающих его с высокой вероятностью, если он находится в телесном угле обстрела.
Недостатки: возможность поражения стреляющего в незащищенные участки тела; необходимость близкого приближения оператора оружия к противнику.
Известна конструкция механизма с одиночным стволом (патент РФ №2076296), в который могут подаваться одна или несколько пуль или другая полезная нагрузка, причем дальность стрельбы устройства регулируется посредством применения газовой камеры. Она служит для формирования требуемого уровня давления пороховых газов на полезную нагрузку (или нагрузки) в момент ее выброса из канала ствола.
В этом устройстве используются многозарядные холостые патроны с электроинициаторами, пороховые газы которых через раздельные каналы и клапаны поступают в газовую камеру, связанную с каналом ствола.
Перед очередным выстрелом в канал ствола могут подаваться одна или несколько полезных нагрузок. Эта операция может осуществляться автоматически или вручную.
Электроинициаторы патронов связаны с источником питания через электронное устройство управления их работой.
За счет выбора (программирования) числа одновременно подрываемых зарядов, а также числа, например, пуль, подаваемых в канал ствола в каждом цикле подрыва зарядов, удается в широких пределах менять размеры зоны поражения противника и регулировать дальность стрельбы.
Пример одной из возможных конструкций электронного устройства управления работой электроинициаторов описан в патенте РФ №2072072.
В этом изобретении также описаны принципы компенсации отдачи многоствольного оружия, повышающие точность стрельбы или позволяющие автоматизировать процесс нацеливания оружия за счет энергии отдачи и реализовать пространственно-статистические методы поражения целей.
Известна группа технических решений по доставке из одной точки пространства и времени в другую точку всевозможных объектов, например людей, грузов или машин, например роботов (патент РФ №2270787, заявка РФ №2004133922).
Способ основан на удалении одного объекта из другого на специальной платформе, выполненной в виде замкнутой жесткой конструкции. Например, в виде контейнера, авиационной бомбы, снаряда, мины или головной части ракеты.
После выброса такой платформы, например, из самолета вокруг нее осуществляют надувание газонепроницаемых оболочек - своеобразных наружных подушек безопасности. Они играют роль тормозной, парашютной системы и системы, смягчающей удар платформы при ее приземлении или приводнении.
Перед удалением объекта согласно способу его автоматически фиксируют внутри платформы путем, например, надувания газонепроницаемых оболочек. Раздуваясь, эти оболочки заполняют собой свободное пространство внутри платформы. За счет этого действия удается быстро обеспечить надежную защиту объекта от возможных повреждений внутри контейнера.
Сдувая оболочки, можно оперативно осуществить процесс обратный процессу фиксации объекта внутри платформы. Наружные оболочки могут быть выполнены из термостойких и пуленепробиваемых материалов, дополнительно защищающих удаляемый объект от внешних воздействий.
Раскрытие изобретения
Задача, решаемая изобретением, - повышение уровня защищенности военнослужащих и эффективности поражения живой силы и/или техники противника.
Технический результат, который может быть получен, - удаление военнослужащих из района боевых действий на безопасное расстояние.
Дополнительный технический результат - уменьшение расстояния ведения огня по противнику.
Для решения поставленной задачи с достижением указанного технического результата осуществляют способ дистанционного поражения противника, заключающийся в доставке в район вероятного нахождения противника робота, выполненного с возможностью поиска и уничтожения противника посредством работы связанных между собой источника питания, устройства управления роботом, устройств ввода информации, предназначенных для поиска противника, устройств вывода информации, предназначенных для перемещения робота в районе вероятного нахождения противника и поражения противника.
Согласно изобретению доставку робота в район вероятного нахождения противника осуществляют на платформе, внутри которой он находится в зафиксированном положении и защищен корпусом платформы от внешнего воздействия, платформу выполняют с возможностью программирования и включения в работу устройства управления платформой, после включения которого работа платформы осуществляется в автоматическом режиме в соответствии с программой работы устройства управления платформой, определяющей во времени последовательность выполнения действий по изменению формы платформы, удалению робота из платформы, включению устройства управления роботом, при этом робота выполняют с возможностью программирования устройства управления роботом и автоматического включения его в работу посредством устройства управления платформой, работа робота осуществляется в автоматическом режиме в соответствии с программой работы устройства управления роботом, которая определяет во времени последовательность выполнения действий робота по его перемещению и поражению противника в районе наиболее вероятного нахождения противника.
Возможны варианты реализации способа:
- робота выполняют в замаскированном виде;
- фиксацию робота внутри платформы осуществляют посредством надувания внутри платформы, по крайней мере, одной внутренней газонепроницаемой оболочки;
- районом вероятного нахождения противника является космическое пространство;
- районом вероятного нахождения противника является воздушное пространство;
- районом вероятного нахождения противника является надводное или подводное пространство;
- областью вероятного нахождения противника является земная поверхность;
- в качестве устройств ввода информации, предназначенных для поиска противника, используют микрофон, и/или фотоэлемент, и/или видеокамеру, и/или анализатор химического состава воздуха, и/или датчик инфракрасного излучения, и/или датчик ультрафиолетового излучения, и/или антенну и радиоприемное устройство;
- для повышения точности обнаружения противника устройство управления роботом выполнено с возможностью согласованной фильтрации и/или корреляционной обработки сигналов, поступающих с устройств ввода информации;
- в качестве устройства вывода информации, предназначенного для поиска противника, используют радиопередающее устройство;
- в качестве устройства вывода информации, предназначенного для поражения противника, используют, по крайней мере, один ствол, в котором размещен, по крайней мере, один патрон с полезной нагрузкой и электроинициатором;
- стволы расположены под углом друг к другу в различных направлениях вокруг робота;
- напротив каждого ствола с противоположной стороны робота установлен компенсатор отдачи;
- в качестве устройства вывода информации робота, предназначенного для поражения противника, используют пушку, ракету, миномет или пулемет, установленные на опорно-поворотном устройстве, а устройство управления роботом выполнено с возможностью наведения опорно-поворотного устройства на противника и управлением ведения огня;
- платформу выполняют с парашютной системой;
- в качестве парашютной системы используют, по крайней мере, один купольный парашют;
- используют парашютную систему надувного типа, выполненную в виде наружных газонепроницаемых оболочек, которые надувают со всех наружных сторон платформы перед ее приземлением;
- платформу выполняют в виде снаряда, мины, авиационной бомбы, контейнера или в виде головной части крылатой или баллистической ракеты;
- робота снабжают устройством самоликвидации робота;
- противником являются солдаты из армий других стран или боевая техника;
- поражение противника заключается в капитуляции или в его уничтожении;
- противником являются хулиганы или экстремисты, например захватчики самолетов;
- поражение противника осуществляется путем его временной нейтрализации посредством воздействия на него газа, резиновых пуль, электрического заряда, звука высокой громкости, краски или сетки;
- платформу выполняют в виде снаряда и доставляют в область вероятного нахождения противника по воздуху путем выстрела ее из пушки, платформу снабжают надувной парашютной системой, выполненной с возможностью трансформации корпуса платформы на части после приземления платформы, в качестве устройства ввода информации, предназначенного для обнаружения противника, используют датчик движения, в качестве устройства вывода информации, предназначенного для перемещения робота, используют электродвигатели, кинематически связанные с гусеницами робота, в качестве устройства вывода информации, предназначенного для поражения противника, используют осколочную мину, снабженную электродетонатором, программирование устройства управления платформой и его включение в работу осуществляют посредством кнопочных переключателей, установленных с наружной стороны платформы, устройство управления платформой выполняют в виде таймера, установленного внутри платформы и связанного посредством легко разъединяющегося разъема с источником питания робота и устройством управления роботом, запрограммированный таймер определяет моменты времени и последовательность выполнения действий по раскрытию парашютной системы платформы, изменению ее формы и включению устройства управления роботом, алгоритм работы робота с момента включения устройства управления роботом представляет собой циклически повторяющуюся последовательность следующих действий, в течение времени Т1+Т2 разрывают цепь, связывающую выход устройства управления роботом с электродетонатором мины, в течение времени Т1 формируют на выходе устройства управления роботом сигнал, обеспечивающий работу электродвигателей и перемещение робота в районе вероятного нахождения противника, в течение времени Т2 калибруют датчик движения, по истечении времени Т1+Т2 восстанавливают цепь, связывающую выход устройства управления робота с электродетонатором мины, в течение времени Т3 анализируют усредненный за время τ уровень сигнала с выхода датчика движения, если в течение времени Т3 усредненный уровень сигнала выше порогового, то на выходе устройства управления роботом формируют сигнал для запуска в работу электродетонатора мины и осуществляют ее подрыв, быстро летящими осколками мины, находящейся поблизости от робота поражают противника, если за время Т2 уровень сигнала с выхода датчика движения ниже порогового, то вышеописанный цикл повторяют вновь до тех пор, пока напряжение источника питания робота не станет ниже порогового значения, после снижения источника питания ниже порога выключают устройство управления роботом.
Выполнение вышеуказанных действий в описанной выше зависимости друг от друга позволяет в рамках одного независимого пункта формулы изобретения описать большую группу вариантов реализации способа в соответствии с требованиями, предъявляемыми к изобретениям по новизне, изобретательскому уровню и промышленной применимости.
Указанные преимущества, а также особенности настоящего изобретения станут понятны во время последующего рассмотрения приведенных ниже примеров и вариантов осуществления изобретения со ссылками на прилагаемые чертежи.
Краткое описание чертежей
На фиг.1 показана обобщенная структурная схема робота.
На фиг.2 изображен график, показывающий во времени выполнение основных действий способа поражения живой силы и техники противника в космосе.
На фиг.3 изображен график, показывающий во времени выполнение основных действий способа поражения живой силы и техники противника на земле.
На фиг.4 изображена конструкция платформы в виде снаряда или авиационной бомбы с двухкупольной парашютной системой и двумя роботами внутри.
На фиг.5 схематично изображена конструкция платформы с надувной парашютной системой и размещенным внутри платформы роботом.
На фиг.6 приведен алгоритм работы робота - интеллектуальной самодвижущейся мины.
На фиг.7 показана блок-схема основных узлов робота-мины.
На фиг.8 показана схема перемещения роботов-мин в районе вероятного нахождения противника.
На фиг.9 показана конструкция пеленгатора звуков и визуальных сигналов противника.
Лучший вариант осуществления изобретения
Современный уровень развития науки и техники позволяет усовершенствовать общеизвестные способы поражения живой силы и техники противника, а также разработать принципиально новую доктрину ведения боевых действий, четко соответствующую общеизвестным положениям Библии и фундаментальным законам природы.
Базовым подходом здесь является принцип замены живой силы - солдат, офицеров и генералов - на полностью автоматизированные кибернетические устройства.
Они предназначены для автономного ведения боевых действий и выполняют две основные функции: а) поиск противника в районе его вероятного нахождения; б) поражение живой силы и/или техники противника.
Для краткости в дальнейшем будем называть эти устройства роботами.
Сразу отметим, что во времени и пространстве роботы могут быть доставлены в район вероятного нахождения противника по-разному.
Способы и характер поражения противника, а также алгоритмы работы роботов могут быть очень разнообразны. Поэтому возможно очень большое число вариантов реализации роботов и способов поражения живой силы и/или техники противника с их использованием - вариантов осуществления изобретения.
На фиг.1 показана обобщенная структурная схема робота.
В соответствии с этой схемой осуществляется работа любого робота согласно изобретению. Робота любой группы сложности, предназначенного для автономного ведения боевых действий в различных районах вероятного нахождения противника (в космосе, воздухе, на земле, на воде, под водой).
Робот содержит: устройство управления 1 роботом; не менее двух устройств ввода 2 информации; не менее двух устройств вывода 3 информации, по крайней мере, один источник питания 4.
Устройства ввода 2 и вывода 3 информации подключаются соответственно к входам и выходам устройства управления 1.
В качестве устройства управления 1 может использоваться аналоговое или цифровое устройство (ЭВМ или микропроцессор) с соответствующим программным обеспечением.
При цифровом варианте реализации устройства 1 управления роботом все основные узлы 1-4 робота могут быть связанны в единую систему посредством, например, унифицированной материнской платы, на которую эти узлы устанавливаются посредством унифицированных разъемов.
При таком подходе функциональные возможности роботов можно оперативно изменять. Например, наращивать функциональные возможности роботов путем установки на материнскую плату дополнительных узлов - устройств ввода 2 и вывода 3 информации, организовывать информационный обмен между роботами подобно тому, как это делается в современных системах, связывающих между собой персональные компьютеры (PC).
При таком подходе можно резко понизить затраты на разработку и производство роботов, обеспечить конструктивную совместимость большого числа вышеуказанных узлов и использовать для реализации различных вариантов изобретения уже существующие, подходящие каналы передачи информации (например, системы беспроводного Интернета, систему GPS и т.д.).
Под конкретную боевую задачу робота можно быстро собрать из унифицированных, малогабаритных совместимых друг с другом заранее сконструированных модулей (1-4). Процесс сборки, программирования и проверки такого робота может занимать порядка одного - двух часов.
В качестве устройств ввода 2 информации могут использоваться любые известные пассивные или активные датчики и устройства: видеокамеры, фотоэлементы, термоэлементы, анализаторы химического состава воздуха (запахов). Или, например, датчики - локаторы взрывчатых веществ, приемники различных сигналов и излучений в инфракрасном или ультрафиолетовом спектрах, антенные устройства с радиоприемниками сигналов различных диапазонов волн, микрофоны, датчики вибрации, датчики нагрузки или деформации корпуса робота, датчики изменения магнитного или электрического поля, гироскопы, а также всевозможные локаторы пространственного по отношению к роботу местоположения живой силы и/или техники противника, излучающего сигналы различной физической природы и частот. Например, устройства и системы пеленгации излучений на радиочастотах, звуковых сигналов, излучений в видимой, инфракрасной, ультрафиолетовой части спектра и т.д.
В качестве устройств вывода 3 информации могут применяться всевозможные двигатели, движители, устройства наведения оружия в цель, активные подвески колес или гусениц, тормозные системы, опорно-поворотные устройства с электрическим, пневматическим или гидравлическим принципом управления.
В качестве устройства вывода 3 информации могут применяться всевозможные радиопередающие устройства и антенны. Например, лазерные излучатели, излучатели СВЧ, светодиоды, громкоговорители, а также, например, надувные устройства для перемещения робота с земли в воздушное пространство или для изменения его местоположения в воздухе, космосе, на воде или под водой.
Источник питания 4 обеспечивает автономный режим работы всех основных узлов 1-3 робота.
В качестве источника питания 4 робота может использоваться любой известный тип источника питания 4, например аккумуляторная батарея или комбинированный источник энергии (солнечная батарея, аккумулятор, генератор электрической энергии и т.д.). Робот может содержать несколько источников питания 4, в том числе и резервный.
Функциональные связи между узлами 1-4 могут быть организованы в виде любых известных аналоговых или цифровых (односторонних или двухсторонних) линий связи (шин), силовых линий, беспроводных линий связи и т.д.
Все возможные варианты подобных связей между узлами 1-4 показаны на фиг.1 схематично в виде пунктирных линий.
Как видно из фиг.1, обобщенная структурная схема робота очень похожа на обобщенную схему любого другого кибернетического устройства.
Отличие состоит в функциональном предназначении основных узлов робота, а также в минимально необходимом и достаточном для решения задачи изобретения числе этих узлов и в соответствующем числе входов и выходов устройства управления 1 робота.
Как показал анализ, для решения задачи изобретения минимально необходимым и достаточным числом входных собственно информационных сигналов о противнике является хотя бы один сигнал. Например, звуковой, визуальный сигнал, тепловой (инфракрасный) сигнал и т.д.
Кроме того, для автоматизации процесса включения в работу устройства 1 управления роботом необходимо и достаточно сформировать также хотя бы один сигнал.
Следовательно, минимально необходимое и достаточное число входных сигналов, поступающих на входы устройства управления 1 роботом, составляет два.
Для решения задачи изобретения необходимо на выходе устройства 1 управления роботом сформировать хотя бы один сигнал, управляющий процессом перемещения робота для поиска противника, и хотя бы один сигнал, управляющий процессом поражения противника в районе его вероятного нахождения.
Таким образом, общее число выходных сигналов устройства 1 управления роботом и соответственно общее число устройств вывода 3 информации также составляет не менее двух.
Для обеспечения автономного режима работы робота необходим хотя бы один автономный источник питания 4, который должен быть подсоединен к потребляющим электрическую энергию узлам робота, например, посредством устройства 1 управления роботом, как показано на фиг.1.
На фиг.1 минимально необходимое число устройств и связи между ними показаны непрерывными линиями. Пунктирными линиями схематично показаны более сложные варианты обобщенных функциональных схем построения роботов согласно изобретению с большим числом устройств ввода 2 и вывода 3 информации и организацией более сложного информационного обмена между этими узлами и устройством 1 управления роботом.
Для решения задачи изобретения также требуется осуществление ряда новых действий во времени и пространстве, без которых задача изобретения решена быть не может. В частности, необходимо осуществить ряд действий перед и в процессе доставки робота в район боевых действий.
На фиг.2, 3 схематично показаны три основных обобщенных этапа действий согласно изобретению: А; В; С.
Первый этап - А - заключается в доставке одного или нескольких роботов в район вероятного нахождения противника из одной точки пространства и времени (точки О) в другую точку (в точку О').
Этот этап во времени должен протекать по возможности как можно быстрей, поскольку быстрая и своевременная доставка роботов в район вероятного нахождения противника или район уже идущих боевых действий позволяет существенно повысить эффективность способа поражения противника.
Для оперативной доставки роботов можно использовать различные общеизвестные способы быстрой доставки материальных объектов.
Доставка роботов в район боевых действий может осуществляться на ракете, самолете, вертолете, торпеде, автомобиле, поезде, катере или посредством выстрела этих объектов из пушки, миномета или стрелкового оружия.
Для надежной защиты робота во время его доставки в район боевых действий целесообразно использовать специальное устройство, выполненное в виде платформы 5, внутри которой может быть размещен один или несколько роботов в зафиксированном положении (фиг.2-5).
Для автоматизации процесса фиксации робота внутри платформы 5 и осуществления обратного процесса можно использовать любые известные технические решения и соответствующие способы. Например, способ, описанный в патенте РФ №2270787 или заявке РФ №2004133922. Согласно этим изобретениям автоматическая фиксация одного объекта (робота) внутри другого объекта (платформы 5) может осуществляться посредством надувания газонепроницаемых оболочек 6 со стороны внутренней поверхности платформы 5.
Раздуваясь, оболочки 6 заполняют пространство между корпусом 7 робота и внутренней поверхностью платформы 5 и обеспечивают мягкую прокладку между корпусом 7 робота и внутренней поверхностью платформы 5 (фиг.4, 5).
Платформа 5 может быть выполнена в виде головной части ракеты (фиг.2), в виде снаряда (фиг.3), авиационной бомбы, мины, пули, обтекателя торпеды, контейнера, беспилотного военно-транспортного самолета, робота-такси, робота-автобуса, поезда и т.д.
Возможна также реализация комбинированных вариантов доставки платформы 5 с роботом или роботами в район вероятного нахождения противника.
Например, на начальной фазе этапа А используется управляемый людьми самолет или вертолет, а в последующем с борта этого летательного аппарата осуществляется запуск ракеты, доставляющей на завершающей фазе этапа А платформу 5 с роботом в район вероятного нахождения противника.
В большинстве вариантов применения изобретения целесообразно выполнить платформу 5 в виде прочной, герметичной, обтекаемой конструкции, которая может автоматически менять свою форму.
Осуществив доставку платформы 5 с роботом или роботами в область вероятного нахождения противника (в точку О', фиг.2, 3), необходимо удалить робота или роботов из платформы 5 и включить роботов в работу. Эти действия должны осуществляться также в автоматическом режиме. Их можно условно отнести ко второму обобщенному этапу (В) реализации способа согласно изобретению. Этап В, по возможности, также должен быть быстротечным.
Возможны различные варианты реализации изобретения, в которых последовательность выполнения вышеописанных действий на этапах А и В может несколько отличаться.
В отдельных вариантах реализации способа целесообразно еще во время доставки платформы 5 в район вероятного нахождения противника включить робота в работу и подать на вход устройства 1 управления роботом сигнал, запускающий устройство 1 управления роботом в работу. Эти действия могут существенно сократить длительность этапа В реализации способа согласно изобретению.
Например, еще до приземления платформы 5 (во время этапа А) целесообразно включить устройство 1 управления роботом и начать загрузку программного обеспечения робота с жесткого диска устройства 1 управления роботом. Таким образом, к окончанию этапа (А) доставки робота робот будет почти готов к осуществлению своих действий по поиску и уничтожению противника.
Синхронно с завершением загрузки программного обеспечения робота целесообразно завершить действия по изменению формы платформы 5 и действия по удалению робота или роботов из платформы 5. Это позволит предельно сократить длительность этапа В. Сразу после приземления платформы 5 робот начинает работу.
В варианте реализации способа, когда районом вероятного нахождения противника является земная или водная поверхность, а доставка платформы 5 осуществляется по воздуху, на последней фазе этапа А необходимо выполнить ряд действий по предотвращению разрушения платформы 5 с роботом в момент их приземления.
Процесс безопасного приземления платформы 5 на поверхность земли или воды можно обеспечить посредством работы парашютной системы, установленной на платформе 5.
Для снижения скорости полета платформы 5 можно использовать любые известные парашютные системы. Например, парашютные системы купольного типа или парашютные системы надувного типа.
Раскрытие платформы 5 в воздухе и спуск малогабаритных роботов на индивидуальных парашютных системах нецелесообразен. Это резко снижает защиту достаточно хрупких и уязвимых роботов и сильно усложняет всю систему и способ.
Такой вариант целесообразно применять, если роботы имеют прочный корпус 7 и хорошую защиту от внешнего воздействия. Например, роботы выполнены в форме бронемашин, танков, самоходных ракетных установок, ракетно-зенитных пусковых установок, самоходных крупнокалиберных пулеметов и другой достаточно крупной и прочной техники.
Для оперативной доставки таких роботов в район боевых действий платформу 5 можно выполнить в виде беспилотного десантно-транспортного самолета типа "Ил-76", "Руслан" или космического корабля многоразового использования типа "Буран".
Для доставки роботов средних размеров можно использовать крылатые ракеты подходящего размера.
Удаление роботов из платформ 5 осуществляют путем их десантирования с использованием, например, общеизвестных купольных парашютных систем с реактивно-тормозными устройствами.
На фиг.4 показан пример, поясняющий процесс спуска платформы 5 с двумя роботами на парашютной системе купольного типа.
Парашютная система выполнена в виде двухкупольной парашютной системы 8. Платформа 5 имеет также надувные амортизаторы - стабилизаторы 9, предназначенные для фиксации положения платформы 5 после ее приземления.
Парашютная система 8 и амортизаторы-стабилизаторы 9 крепятся к платформе 5 соответственно сверху и снизу (фиг.4).
На фиг.4 также показаны в надутом состоянии две внутренние газонепроницаемые оболочки 6. Они обеспечивают надежную фиксацию роботов внутри платформы 5 во время их доставки в район вероятного нахождения противника.
Способы спуска летательных аппаратов с использованием купольных парашютов общеизвестны и подробно описаны, например, в патенте РФ №2021164. Там же описана работа в автоматическом режиме всех основных узлов купольных парашютных систем.
Наиболее подходящим для доставки в район вероятного нахождения противника малогабаритных роботов можно считать способ торможения и защиты платформы 5 с роботом с использованием надувных парашютных систем, фиг.5.
Такой способ обеспечивает быстрый тормозной эффект и высокую защищенность платформы 5.
В отличие от купольных парашютных систем надувные парашютные системы могут быть принудительно раскрыты за доли секунды перед приземлением платформы 5. Например, на высоте в несколько метров. Это дает большие преимущества в условиях проведения современных боевых операций при высокой плотности огня и существенно затрудняет процессы обнаружения платформ 5 и их уничтожение в воздухе во время спуска на парашютной надувной системе. Кроме того, надувные парашютные системы не имеют строп, в которых могут запутаться платформы 5 или роботы.
Надувная парашютная система (фиг.5) состоит из наружных газонепроницаемых оболочек 10, которые раздуваются во все стороны снаружи от корпуса платформы 5 перед ее приземлением.
Принцип работы оболочек 10 может быть схож с принципом надувания и сдувания автомобильных подушек безопасности. Эти действия осуществляются посредством работы устройства 11 управления работой наружных газонепроницаемых оболочек 10.
За счет выполнения газонепроницаемых оболочек 10 различного размера можно осуществить спуск и приземление (или приводнение) платформы 5 в оптимальное положение, удобное для дальнейшего осуществления действий по удалению робота или роботов из платформы 5.
За счет различного размера раздутых оболочек 10 центр тяжести всей приземляющейся системы смещается вниз и платформа 5 в воздухе, а затем и на земле (воде) подобно детской игрушке "Ваньке-встаньке" занимает удобное для удаления роботов положение.
На фиг.5 также показана в надутом состоянии одна внутренняя газонепроницаемая оболочка 6, защищающая корпус 7 робота от ударов о внутреннюю поверхность платформы 5 во время ее ускорения.
Спуск платформы 5 с надувной парашютной системой гарантирует высокую плавучесть и дополнительную защиту платформы 5 с роботом 7, например, при приземлении платформы 5 на острые камни.
Оптимальное положение платформы 5 на земле после приземления можно достичь в результате определенной последовательности сдувания наружных оболочек 10 и/или посредством механических усов-стабилизаторов, автоматически раскладывающихся или выдвигающихся из платформы 5.
Например, сдувая сначала наружные оболочки 10, образующие надувной защитный слой нижнего полупространства вокруг платформы 5, можно перевернуть или довернуть платформу 5 в оптимальное положение и придать ей устойчивое положение.
Процесс удаления робота или роботов из платформы 5 после приземления или приводнения платформы 5 (этап В фиг.2, 3) может осуществляться различными способами (вариантами).
Например, две или более частей платформы 5 могут автоматически раскрываться или разлетаться в стороны за счет использования энергии пружин, разводящих в разные стороны части платформы 5 после срабатывания замков с электромагнитными защелками, удерживающими в сведенном положении части платформы 5.
В варианте этому процессу может предшествовать процесс уничтожения наружных элементов парашютной системы. Например, путем закачки в наружные газонепроницаемые оболочки 10 химически активной субстанции, способной растворять оболочки 10.
Удалить оболочки 10 от платформы 5 можно, надувая их до критического давления, когда происходит их отрыв от корпуса платформы 5.
Процессы изменения формы корпуса платформы 5, удаления от робота наружных оболочек 10 и удаление робота из платформы 5 можно осуществить синхронно путем разрывания на части платформы 5 за счет резкого надувания наружных газонепроницаемых оболочек 10.
При превышении определенного порога давления в оболочках 10 силы, отталкивающие оболочки 10 друг от друга и от платформы 5, стремятся разорвать платформу 5 на части и удалить части платформы 5 от робота.
Процесс удаления робота из корпуса платформы 5 может также быть реализован с использованием пиротехнических болтов, химически активных материалов или способа взрывной резки корпуса платформы 5.
Например, платформа 5, по форме выполненная в виде типового снаряда, пули или авиационной бомбы, может состоять, по крайней мере, из двух поперечных или продольных, отделяемых друг от друга частей (фиг.4). Эти части могут отстреливаться в разные стороны посредством пиротехнических болтов. Части платформы 5 могут отделяться друг от друга посредством взрывной резки, так как это описано в патентах РФ №2200688 или №2021164.
В варианте, корпус платформы 5 может быть выполнен в виде склеенных небольших участков частей платформы 5 (замков) с возможностью воздействия на склеенные участки химически активного вещества или электрически нагреваемой спирали.
Робот может быть удален из платформы 5 путем его выталкивания частью пороховых газов, отведенных по специальным каналам, расположенным в корпусе платформы 5 при срабатывании пиротехнических болтов или за счет действия на робота механических рычагов или пружин, в момент раскрытия платформы 5.
Покинуть платформы 5 роботы могут также и своим ходом, например выехать, выпрыгнуть, выползти, выплыть или вылететь из нее за счет работы двигателей или движителей роботов - устройств вывода 3 информации, обеспечивающих соответствующие виды перемещений роботов в области вероятного нахождения противника.
Автоматизация вышеописанных процессов фиксации роботов внутри платформы 5, срабатывания всех систем и узлов парашютных систем и изменения формы платформы 5 может быть осуществлена посредством работы устройства 12 управления работой платформы 5 и конкретного алгоритма протекания этих процессов во времени.
С учетом сказанного выше в первом пункте формулы изобретения можно лишь перечислить вышеуказанные действия и в качестве существенного признака указать, что последовательность их осуществления во времени определяется конкретным алгоритмом или программой работы устройства 12.
В простейшем варианте устройство 12 управления может быть выполнено в виде таймера, запрограммированного, например, с учетом расчетного времени протекания вышеуказанных процессов (этапов А, В, С согласно фиг.2, 3).
Например, перед доставкой робота в требуемую область пространства нахождения противника с использованием пушки (фиг.3) предварительно программируют таймер в соответствии с расчетной скоростью полета платформы 5 и дальностью стрельбы.
Действия по программированию таймера можно осуществить посредством малогабаритных кнопок, установленных в небольших углублениях с наружной стороны корпуса платформы 5. Подобно кнопкам на электронных часах. Или осуществить процесс программирования таймера посредством электрического разъема, временно подключаемого к корпусу платформы 5.
Запрограммированный таймер может находиться в режиме ожидания его запуска определенное время, например 1 час. Если за это время платформу 5 с роботом ("снаряд") не выстрелили из пушки, то таймер автоматически сбрасывается. И находится в экономичном режиме потребления электрической энергии источника 1 до повторного программирования и запуска таймера.
Запуск таймера в работу может быть синхронизирован с моментом времени во время выстрела из пушки или, например, синхронно с нажатием кнопки запуска ракетоносителя, открытия бомболюка самолета, запуска торпеды и т.д.
После запуска снаряда таймер вырабатывает определенную последовательность сигналов, которые запускают строго в определенной последовательности в работу все перечисленные выше узлы платформы 5, и активизирует робота. Например, подобно запрограммированному на неделю электронному будильнику или сотовому телефону.
В варианте запуска платформы 5 с использованием пушки роль кнопки, запускающей таймер в работу, может играть датчик вибрации или микрофон, конструктивно установленный также в корпусе платформы 5. Этот датчик формирует на своем выходе сигнал при очень высокой вибрации или при высоком уровне звукового сигнала, который возможен только при выстреле платформы 5 из орудия.
Такой способ синхронизации запуска таймера исключает ложное срабатывание таймера от незначительных механических ударов по корпусу платформы 5, например, во время подготовки "снаряда" - платформы 5 к выстрелу из пушки. Поэтому запуск подобных платформ 5 - снарядов, может осуществляться посредством промышленно выпускаемых пушек, гаубиц или минометов - без какой-либо их специальной доработки.
В качестве устройства 12 управления работой платформы 5 может использоваться более сложное микропроцессорное устройство или ЭВМ, запрограммированное под конкретную боевую задачу и конкретный вариант применения изобретения.
Устройство 12 управления платформой может быть выполнено виртуально - в виде соответствующей программы устройства 1 управления роботом.
Процесс программирования устройства 12 может осуществляться вручную перед выстрелом платформы 5 или быть полностью автоматизирован.
Например, пушка может быть снабжена устройством автоматического программирования таймера платформы 5 - снаряда. Процесс программирования устройства 12 управления платформой (таймера) может осуществляться параллельно с процессом зарядки снаряда - платформы 5 - и наведения орудия на цель.
Подобные действия по автоматическому программированию таймера платформы 5 могут осуществляться также, например, в момент выброса бомбы из люка бомбардировщика, выстрела торпеды из подводной лодки или корабля.
Автоматические системы программирования таймера "снаряда" (или "бомбы") могут быть выполнены по аналогии с системами автоматизированного электронного учета товаров в кассах современных супермаркетов. С той разницей, что вместо товаров, перемещаемых перед оптически считывающим лазерным устройством кассы, перемещают платформы 5 с роботами перед считывающими устройствами пушки, установленными внутри затвора пушки (или в бомболюке бомбардировщика). В качестве устройства вывода информации применяют не кассовый аппарат, распечатывающий чек с указание наименования товара, его стоимости, полученной суммы денег, общей суммарной стоимости товаров и суммы сдачи, а применяют устройство вывода информации, компьютеризированной пушки, предназначенное для программирования устройства 12 управления платформой 5 (таймера платформы 5). Например, в соответствии с требуемой дальностью стрельбы (или высотой бомбометания) и расчетным временем полета платформы 5 до района вероятного нахождения противника. Все необходимые данные по программированию таймера могут формироваться и обрабатываться посредством бортовой ЭВМ самолета-бомбардировщика или посредством ЭВМ компьютеризированной пушки.
В варианте применение компьютера, управляющего процессами наведения орудий, программирования устройств 12 управления платформ 5 и автоматической перезарядки орудий, может позволить создание полностью автоматической системы по доставке требуемого числа роботов в район боевых действий.
Такая полностью автоматизированная батарея может быть установлена, например, вблизи охраняемой границы в труднодоступном районе (в горной или пустынной местности, в космосе в виде группировки спутников, вооруженных высокоскорострельными пушками и т.д.). Управление работой такой батареей может осуществляться с дистанции. Например, посредством спутниковых систем передачи информации.
Запуск устройства управления 1 робота в работу на этапе С (фиг.2, 3) осуществляется автоматически, посредством работы устройства 12 управления платформой 5 (таймера), вырабатывающего сигнал для включения устройства управления 1 роботом в работу.
Если устройство управления платформой 12 и устройство управления 1 роботом конструктивно выполнены в виде двух отдельных устройств, то сигнал с выхода устройства управления платформой 12 (таймера) может передаваться любым известным способом на один из вышеупомянутых информационных входов устройства управления 1, предназначенный для автоматического включения устройства 1 управления роботом.
Передача этого сигнала может осуществляться, например, посредством легкоразъединяющегося разъема, тонких, быстрорвущихся проводов или беспроводным способом (посредством оптопары, индукционным способом, по радиоканалу по акустическому каналу, механическим способом и т.д.).
Если устройство управления платформой 12 и устройство управления 1 роботом конструктивно совмещены в одном узле и, например, являются лишь различными подпрограммами одного общего узла управления работы платформы 5 и робота, то сигнал с выхода устройства 12 управления платформой 5 имеет виртуальную (программную) связь с входом устройства 1 управления роботом. Одна подпрограмма включает в работу другую подпрограмму посредством, например, условного или безусловного оператора перехода.
Платформа 5 может быть снащена отдельным источником питания или питаться от источника 4 питания робота. При этом связь источника 4 робота с электрическими узлами платформы может осуществляться посредством легкоразъединяющегося разъема или легкорвущихся проводов.
Для эффективного решения сложных боевых задач робот может также собирать дополнительную, вспомогательную информацию, оптимизирующую его действия в области наиболее вероятного нахождения противника. Например, получать дополнительную информацию о действиях противника (подсказки), информацию по смене программы его работы или прекращению функционирования робота.
Например, находясь на космической орбите, робот может регистрировать пуски взлетающих ракет противника, передавать информацию об этом другим роботам, рассчитывать возможные траектории полета взлетевших ракет противника. Или собирать информацию о пролетающих мимо него объектах, анализировать их назначение, следить за их полетом и действиями, перемещаться в космосе вслед за ними.
По сигналам, поступающим от других роботов, робот может изменить свою орбиту в направлении сближения с противником. Например, начать перемещаться с одной орбиты на другую орбиту или войти в атмосферу земли навстречу взлетающей баллистической ракете или иному летящему объекту (самолету, аэростату, крылатой ракете, вертолету).
Роботы могут находиться в космическом пространстве в ожидании взлета ракет противника и начала боевых действий годы и даже десятилетия. Выработав свой ресурс, они могут самоуничтожиться в космосе или в атмосфере земли. На их место могут быть отправлены новые роботы.
В качестве вооружения космического робота-"пограничника" может использоваться любой известный боезаряд и способ поражения противника. Например, заряд направленного действия, ядерный заряд большой мощности. Робот может в качестве вооружения иметь различные ракеты, например класса космос-космос, космос-земля, космос-воздух и т.д.
В качестве космического оружия можно также использовать лазерные пушки или развертываемые в космосе препятствия - ловушки. Например, всевозможные сети-ловушки, химически активные аэрозоли или объекты, обладающие способностью прилипать к корпусу космического объекта противника и разрушать его при входе этого объекта в атмосферу на высокой скорости.
После удаления робота из платформы 5 может включиться система определения местоположения робота на местности, а также система опознавания свой-чужой.
В простейшем случае, программа перемещения робота может заключаться в том, чтобы удалиться от платформы 5 и от места приземления на безопасное расстояние, исключающее его гибель в случае прицельного удара противника по месту приземления платформы 5 (по точке О' - фиг.3).
Рассмотрим более подробно в качестве примера вариант осуществления изобретения, когда робот выполнен в виде интеллектуальной самодвижущейся мины.
На фиг.6 изображена блок-схема действий согласно изобретению.
Действия по программированию и установке робота в платформу 5, программированию платформы 5, включению устройства 12 управления работой платформы 5, доставки платформы 5 в область вероятного нахождения противника, трансформации платформы 5 и включению устройства 1 управления роботом уже рассмотрены и прокомментированы выше.
Эти действия относятся к подготовительным этапам (А, В) реализации способа согласно изобретению.
Как уже отмечалось в различных вариантах осуществления изобретения, последовательность выполнения этих действий во времени может быть иной. Поэтому последовательность вышеуказанных действий, показанная на фиг.6, не является единственно возможной, а является одним из возможных вариантов их выполнения во времени.
Группа действий, выделенная пунктирной линией на фиг.6, определяет алгоритм работы устройства 1 управления робота-мины.
На фиг.7 приведена структурная схема устройства 1 управления роботом, поясняющая работу основных узлов робота-мины.
Алгоритм работы робота (фиг.6) представляет собой циклически повторяющуюся последовательность действий по перемещению робота в пространстве, калибровке датчика движения и действий по анализу движения противника вокруг робота. Эти действия циклически повторяются во времени соответственно в течение времени Т1, Т2, Т2 до тех пор, пока противник не будет обнаружен и уничтожен или пока напряжение источник 1 не понизится ниже определенного порога.
Таким образом, процесс программирования робота на вспомогательных этапах заключается в установке конкретных параметров временных интервалов Т1, Т2, Т3. Эти параметры можно установить программным способом, если устройство управления 1 роботом выполнено в виде ЭВМ или аппаратным способом. Например, посредством переменных резисторов, входящих в состав блока управления 13, определяющих формирование временных интервалов Т1, Т2, Т3.
Для простоты, в данном примере в качестве устройства 2 ввода информации, предназначенного для обнаружения противника, задействован единственный датчик движения 14.
Этот датчик может быть выполнен по аналогии с датчиком автомобильной сигнализации, включающей отпугивающий звуковой сигнал при приближении к автомобилю постороннего лица или иного объекта.
Поскольку движение живой силы и/или техники противника приводит к изменениям во времени спектров различных типов сигналов, излучаемых противником в сторону робота, то принцип работы датчиков движения 14 может быть основан на регистрации изменяющейся структуры поля, сформированного вокруг робота. Например, магнитного, электрического или электромагнитного поля. Или анализа спектров сигналов различной физической природы, излучаемых противником в направлении робота (звуки, свет, запахи, электромагнитные сигналы искусственного происхождения, тепловые (инфракрасные) сигналы и т.д.).
В качестве устройства вывода 3 информации, предназначенного для пространственного перемещения робота, как видно из фиг.7, используются электродвигатели 15, кинематически связанные с гусеницами или колесами робота. Схема включения электромоторов 15 позволяет роботу двигаться вперед, по кругу (разворачиваться) или более сложной траектории.
В качестве устройства 3 вывода информации, предназначенного для поражения противника, может использоваться электродетонатор 16, установленный внутри, например, осколочной мины 17.
Корпус 7 робота-мины может быть замаскирован, например, под кирпич, упаковочную коробку или иной строительный, бытовой предмет или объект природного происхождения, не выделяющийся формой или цветом на фоне других объектов или предметов (кочка, камень, строительный или бытовой мусор и т.д.).
Устройство управления 1 роботом может быть выполнено в виде несложного аналогового устройства, анализирующего, например, усредненный за время τ уровень сигнала с датчика движения 14 и формирующего сигнал для подрыва мины 17, когда уровень этого сигнала превышает определенный порог.
Для реализации этих действий можно использовать, например, усилитель 18, детектор 19 и фильтр низких частот 20, которые связанны между собой последовательно. А также реле 21, которое управляется сигналом с выхода фильтра низких частот 20 и обеспечивает формирование на выходе устройства 1 управления сигнала, необходимого для надежного срабатывания электродетонатора 16 мины 17.
Если датчик движения 14 остается все время подключенным к входу устройства 1 управления роботом, как показано на фиг.7, то в разрыв цепи, связывающей выход устройства управления 1 с электродетонатором 16 мины 17, необходимо установить реле 22.
Это реле играет роль предохранителя и исключает подрыв мины 17 во время переходных процессов при первоначальном включении устройства 1 управления роботом, а также во время движения робота и возможного появления ложных сигналов с датчика движения 14 для подрыва мины.
Работа основных узлов робота-мины происходит в соответствии с алгоритмом, показанным на фиг.6.
Сигналом с устройства ввода 2 информации (с таймера платформы 5), предназначенного для включения устройства 1 управления роботом, осуществляется включение самоблокирующегося реле 23.
Это реле обеспечивает подачу напряжения на все узлы робота вплоть до разрядки источника питания 4 и выполняет функцию узла, анализирующего уровень напряжения питания источника 4.
Когда напряжение источника питания 4 станет ниже порогового, реле 23 отключает источник питания 4 от всех основных узлов робота и робот прекращает свое функционирование. Он становится абсолютно безопасным для окружающих его объектов и может быть удален из района вероятного нахождения противника для его утилизации или повторного использования.
Емкость источника 4 питания робота и выбранный режим его работы, таким образом, определяют время работы робота.
После срабатывания реле 23 включается в работу блок управления 13. На его выходах формируются циклически повторяющие импульсы определенной длительности T1, T2, Т3. Посредством этих импульсов задаются режимы работы других узлов робота (фиг.7).
Блок управления 13 может быть выполнен, например, в виде связанных мультивибраторов или в виде мультивибратора, связанного с формирователями импульсов определенной длительности или в виде цифрового устройства, состоящего из генератора, и формирователя выходных импульсов.
С выходов блока управления 13 сигналы подаются на реле 22 (предохранитель) и двигатели 15.
Длительность импульса (T1+T2), подаваемого на реле 22, больше времени T1, определяющего работу двигателей 15 робота. Это условие обеспечивает надежную защиту мины 17 от подрыва не только на этапе движения робота, но и на последующем этапе калибровки датчика движения.
После движения робота в течение времени T1 двигатели 15 выключаются и робот останавливается на время T2+Т3.
В течение времени T2 осуществляется калибровка датчика движения 14. Она необходима для того, чтобы выставить оптимальный порог срабатывания датчика 14 в соответствии с окружающей робота, заранее неизвестной обстановкой, которая может существенно меняться от места к месту из-за различного рельефа местности, из-за изменения погоды, времени суток.
Калибровка датчика движения 14 представляет собой процесс экспериментального подбора состояния управляемого аттенюатора 24, определяющего чувствительность датчика движения 14.
Управляемый аттенюатор 24 может быть установлен, например, в разрыв цепи между выходом датчика движения 14 и усилителем 18, как показано на фиг.7.
В начале каждого цикла калибровки датчика движения 14 устанавливается максимальное ослабление аттенюатора 24 и соответственно минимальная чувствительность датчика движения 14.
Этому состоянию аттенюатора 24 всегда соответствует отсутствие сигнала на выходе реле 21.
Затем чувствительность датчика движения 14 последовательно повышают, изменяя (повышая) коэффициент передачи аттенюатора 24.
После каждого очередного изменения состояния аттенюатора 24 посредством схемы сравнения 25 сравнивают сигналы на выходе реле 21 с предыдущим сигналом, то есть с логическим нулем.
Если на выходе реле 21 появился сигнал - логическая единица, то это означает, что предыдущий коэффициент деления напряжения сигнала с датчика движения 14 и чувствительность датчика были оптимальными.
Это состояние аттенюатора 24 восстанавливается и сохраняется до завершения отрезка времени Т2, предназначенного для калибровки датчика движения 14, а также на время последующего отрезка времени Т3 - времени анализа движения вокруг робота-мины. В режиме боевого дежурства робота.
После завершения отрезка времени Т2 реле 22 замыкается на время ТЗ и мина снимается с предохранителя.
Если в течение времени Т3 какой-либо объект приблизится к роботу на расстояние срабатывания датчика движения 14, например человек приблизится к роботу ближе 3 м, то на выходе устройства управления 1 появится сигнал подрыва мины 17. Приблизившийся к роботу объект будет уничтожен быстролетящими осколками робота-мины.
Если за время Т3 робот не зарегистрирует вокруг себя движущегося объекта, то вышеописанный цикл повторится снова.
Реле 22 переключится в режим "предохранитель", робот переместится на новую позицию, произведет калибровку датчика движения 14 и на новом месте будет анализировать вокруг себя движение противника. И так дальше.
Данный пример показывает, что задача изобретения и заявленный технический результат могут быть достигнуты с использованием роботов и ряда действий по их доставке в район вероятного нахождения противника.
Военнослужащие удалены из района вероятного нахождения противника на безопасное расстояние. Поиск и поражение противника осуществляют машины-роботы в соответствии с конкретной программой (алгоритмом) их работы. Причем тактика ведения боевых действий роботов может существенно отличаться от известных приемов военных действий с участием живых солдат.
Для пояснения этих отличий воспользуемся фиг.8.
На фиг.8 схематично, пунктирной линией показан район 25 вероятного нахождения живой силы 26 и техники 27 противника. На фиг.8 штрихпунктирной линией также показана условная линия фронта 28, окопы противника 29, места 30 приземления платформ 5 с роботами. Маршруты 31 перемещений роботов в районе 25 вероятного нахождения противника показаны на фиг.8 штрихпунктирными линиями со стрелками.
Как видно из фиг.8, после приземления платформ 5 роботы перемещаются по району 25 вероятного нахождения противника по различным, достаточно сложным траекториям, которые соответствуют программе (алгоритму) их работы. Причем у каждого робота может быть свой маршрут передвижения и различный график работы во времени. Роботы могут быть запрограммированы по-разному. Параметры T1, T2, Т3 могут существенно отличаться.
Когда одни роботы находятся в режиме анализа движения вокруг себя, другие роботы перемещаются. Таким образом неподвижные роботы "прикрывают" перемещающихся роботов, которые в момент их перемещения не способны вести боевые действия и уязвимы для противника.
При определенной плотности роботов в районе 25 вероятного нахождения противника их перемещения приобретают почти стохастический характер. Подобно броуновскому движению молекул. Они начинают полностью контролировать район вероятного нахождения противника, многократно прочесывают этот район и не позволяют противнику перемещаться в этом районе, чтобы не быть обнаруженным и уничтоженным.
За счет выбора траектории движения роботов по кругу или по спирали удается удерживать группировку в районе 25 вероятного нахождения противника и не расползаться в другие места. В результате перемещения часть роботов оказывается у окопов 29 противника и падает в них (фиг.8).
Роботы, приземлившие на дно окопа 29 на гусеницы или колеса, перемещаются по дну окопа 29 в поисках живой силы и/или техники противника, пока не найдут движущегося противника 26 и не уничтожат его.
Роботы, попавшие в естественные ловушки пересеченной местности и не имеющие возможности передвигаться в районе 25 вероятного нахождения противника, продолжают пассивно участвовать в боевой операции. Они анализируют движение противника вокруг того места 32, где они потеряли свою способность к движению, например, оказавшись вверх колесами или гусеницами на дне окопа 29, в естественных ямах или воронках от снарядов и авиационных бомб и т.д.
Через некоторое время с начала доставки группировки роботов в район боевых действий противник вынужден сдаться. Ему некуда деться от большого числа настырных, бесстрашных роботов - самодвижущихся мин, и он оказывается не в состоянии вести активные боевые действия. Перемещающиеся по дну окопа 29 роботы находят и уничтожают укрывавшегося в окопах противника, если тот как-то проявляет себя. Противник также не может спастись бегством. Пробегая в районе 25 мимо роботов или по дну окопа 29, он будет уничтожен.
При высокой емкости источников питания 4 роботов и возможности их подзарядки в дневное время суток роботы могут длительное время вести прочесывание района 25 и вынудить противника рано или поздно сдаться. Этот процесс может длиться от нескольких часов до нескольких суток. Затем роботы прекращают свою работу и район 25 становится абсолютно безопасным.
Для того чтобы роботы не уничтожали друг друга во время перемещений по району 25 вероятного нахождения противника, устройство 1 управления роботом может содержать устройство распознавания свой - чужой.
В качестве такой системы можно использовать приемники и передатчики, работающие, например, в инфракрасной части спектра и имеющие широкие диаграммы для приема и передачи инфракрасных импульсных кодированных сигналов. Дальность работоспособности системы свой - чужой может быть небольшой, например 5-15 м. Но она должна быть несколько больше, чем расстояние обнаружения противника.
Для распознавания движущихся объектов структурная схема, показанная на фиг.7, должна быть дополнена, по крайней мере, еще одним реле или ключом (дополнительным предохранителем), которое необходимо установить в разрыв цепи между выходом реле 22 и входом электродетонатора 16 мины 17.
В состав устройства 1 управления роботом также должны быть включены узлы: а) передатчик устройства свой - чужой, формирующий цифровой кодированный сигнал запроса; б) приемник устройства свой - чужой для приема и дешифрации принятого сигнала-ответа. Сигналом с выхода дешифратора приемника осуществляется управление дополнительным реле - предохранителем.
Работа системы свой-чужой может быть организована, например, по следующему алгоритму.
В режиме анализа движения противника вокруг робота (Т3) реле - дополнительный предохранитель - находится все время в разомкнутом состоянии, до тех пор, пока на него не поступит сигнал с выхода дешифратора - приемника устройства свой - чужой. Это позволяет предотвратить подрыв электродетонатора 16 мины 17 до завершения работы устройства свой - чужой.
Если в режиме анализа движения противника датчик движения 14 регистрирует какое-то движение поблизости от робота, на выходе реле 21 появляется сигнал, посредством которого включается в работу устройство свой - чужой.
Посредством передатчика устройства свой - чужой и соответствующего излучателя (светодиода) во все стороны от робота излучается импульсный кодированный сигнал запроса. Например, подобно сигналу "Вкл.", излучаемому в домашнем помещении с пульта дистанционного управления бытовой электронной техникой.
Если движущийся объект имеет аналогичное устройство свой - чужой, способное осуществить прием и декодирование этого сигнала, то за короткий отрезок времени в ответ движущийся робот осуществляет формирование и передачу также закодированного сигнала-ответа на запрос, подтверждающий, что это свой робот.
Робот, анализирующий движение вокруг себя, принимает и декодирует этот сигнал и на выходе устройства свой - чужой сохраняется сигнал, определяющий предыдущее состояние дополнительного реле-предохранителя. Таким образом, исключается подача напряжения на электродетонатор 16 мины 17 и уничтожение рядом движущегося своего робота.
При очередном срабатывании датчика 14 работа узлов устройства свой - чужой повторяется по описанному выше алгоритму. И так до тех пор, пока один из роботов, являющийся движущимся объектом для другого робота, не остановится или не удалится от неподвижного робота на расстояние, при котором датчик движения 14 неподвижного робота перестанет регистрировать движение этого робота.
Если движущийся объект не успеет сформировать и передать за отведенное время (например, за 0,001 сек) ответный сигнал, подтверждающий, что это свой робот, или принятый сигнал будет закодирован неправильно, то на выходе дешифратора формируется сигнал, который замыкает цепь подачи сигнала на электродетонатор 16 мины 17 посредством дополнительного реле-предохранителя и происходит подрыв электродетонатора 16 мины 17. Неопознанный объект-противник уничтожается осколками робота-мины.
Устройствами свой - чужой можно снабжать не только своих роботов, но и своих солдат, если они по каким-либо причинам оказались в районе 25 вероятного нахождения противника. Например, прибыли в район 25 для пленения сдавшегося противника 26 и сбора роботов после завершения боевых действий (фиг.8).
Возможен вариант реализации робота, внутри которого, помимо взрывного устройства, могут быть установлены многоствольные, многозарядные патроны, пространственно сориентированные в одну или несколько сторон. В варианте они могут быть установлены под углом друг к другу - веером, или установлены на опорно-поворотных, управляемых устройствах или платформах с электрическим приводом и управлением.
Алгоритм работы роботов, вооруженных стрелковым оружием, может быть более сложным, чем у робота-мины. Структурная схема устройства 1 управления роботом может содержать ряд дополнительных узлов по сравнению со структурной схемой, показанной на фиг.7.
Робот может также содержать ряд дополнительных устройств 2 ввода информации.
Во время стрельбы обработка информации с выходов датчиков - устройств 2 ввода информации - может быть временно прекращена, поскольку в условиях стрельбы за счет отдачи робот может приобрести сильную вибрацию и перемещаться в пространстве. Подобные движения корпуса 7 робота могут быть источником паразитной обратной связи и привести к бесполезной трате зарядов.
Для управления стрелковым вооружением робота с использованием электроинициируемых многозарядных патронов можно использовать устройство для управления работой электроинициаторов, которое подробно описано в патенте №2072072.
Подобное устройство позволяет после каждого очередного включения датчика движения 14, играющего роль кнопки спускового крючка электронно-управляемого оружия, описанного в патенте РФ №2072072, осуществить поражение движущегося объекта одиночным выстрелом, очередью или серией очередей с определенным числом выстрелов.
Программирование числа выстрелов в очереди, темп и характер стрельбы может автоматически устанавливаться посредством работы устройств 2 ввода информации и, например, схемы анализа сигналов с этих датчиков.
Например, если включился только один датчик движения 14, то робот осуществляет в сторону источника движения одиночный выстрел - пугает и провоцирует противника на более активное движение. Если включились несколько датчиков, то робот дает в сторону противника очередь из нескольких выстрелов. Если включились все датчики, то робот осуществляет залповый выстрел или очередь из залповых выстрелов по противнику - ведет пространственно-статистическое уничтожение противника в определенном секторе обстрела.
Возникающие при стрельбе импульсы отдачи можно компенсировать за счет синхронного подрыва холостых зарядов с противоположных сторон корпуса робота, например, как это предложено делать в патенте №2072072.
Импульс отдачи можно также использовать для поворота огнестрельного оружия вокруг оси, для генерации электроэнергии, питающей робота, или движения робота и смены боевой позиции.
Для точного ведения стрельбы по противнику в качестве устройств 2 ввода информации робот может иметь, например, пеленгатор направления прихода звуковых волн или пеленгатор движения в видимой или инфракрасной части спектра. Эти устройства позволяют определять направление на противника и вести огонь только в ту сторону, где происходит движение противника, и/или в том направлении, откуда приходят наиболее громкие звуки, характерные для живой силы и/или техники противника.
На фиг.9 схематично показан один из возможных примеров конструкции пеленгатора 32 совмещенного с электронно-управляемым огнестрельным оружием 33 робота.
Конструктивная особенность пеленгатора состоит в том, что для пеленгации сигналов различной физической природы используют общие формирователи диаграмм 34 направленности, например, микрофонов 35 и фотоэлементов 36.
Узкие лепестки диаграмм 34 направленности достигаются посредством трубки 37 небольшого диаметра. С одной стороны каждой трубки 37 установлен малогабаритный микрофон 35 и фотоэлемент 36. Другой конец каждой трубки 37 сориентирован в определенном, заранее известном направлении по отношению к корпусу 7 робота, как это показано на фиг.9.
Переменные сигналы с выходов микрофонов 35 и фотоэлементов 36 анализируются за некоторое время τ (например, за 0,1 и 0,01 сек соответственно) посредством узлов (18, 19, 20, 21) схем анализа аналогичных схеме, показанной на фиг.7.
Определив максимальный звуковой или изменяющийся визуальный сигнал за время анализа и ему соответствующий микрофон 35 или фотоэлемент 36, таким образом определяют направление на источник звука или определяют местоположение движущегося объекта по отношению к роботу.
Убедившись посредством работы устройства свой - чужой, что этот движущийся объект - противник, в этом направлении ведут стрельбу в соответствии с конкретным алгоритмом работы устройства 1 управления роботом.
Например, осуществляют запуски электроинициаторов 37 огнестрельного оружия 33 робота, сориентированного в требуемом направлении. На фиг.9 показаны стволы 38 с электроинициаторами 37 и полезной нагрузкой (например, пулями) 39, сориентированные в различные стороны вокруг робота.
Подобная конструкция оружия позволяет роботу без дополнительных, демаскирующих его движений и перемещений быстро осуществить стрельбу в сторону противника.
В сторону противника может быть запущена ракета, снаряд, осколочная мина или граната посредством работы электрически управляемого опорно-поворотного устройства робота, выполненного, например, подобно башни танка или самоходной минометной или ракетно-зенитной установки.
Во времени процесс установки чувствительности датчиков движения 14 может быть достаточно быстротечным, поэтому целесообразно часто повторять эту операцию и накапливать информацию по результатам калибровки датчиков 14 в памяти устройства 1 управления роботом. Или, например, в памяти робота, предназначенного для обработки подобной информации.
Такой робот-интеллектуал может находиться на удалении от района боевых действий, например на геостационарной орбите. Посредством соответствующих беспроводных каналов связи он может осуществлять прием больших массивов данных и информации от наземных роботов и направлять им сигналы управления (команды), например, по установке оптимальной чувствительности датчиков, задания по уничтожению обнаруженных другими роботами движущихся объектов и т.д.
Статистический, системный анализ постоянно поступающей и обновляющейся информации позволит существенно снизить ложные атаки роботов на мнимые цели, а также организовать перемещение роботов в сторону противника по кратчайшим, оптимальным маршрутам.
Информация о противнике может обрабатываться с использованием корреляционных методов.
Суть этих методов общеизвестна и описана, например, в патенте РФ №2145446.
Корреляционная обработка, например, звуковых сигналов заключается в том, что за определенный, относительно небольшой период времени текущие реализации принятых звуковых сигналов сравнивают с опорными реализациями, находящимися в памяти робота.
Сравнение реализаций может, например, осуществляется путем перемножения небольших сдвинутых относительно друг друга на небольшое время реализаций принимаемых сигналов с опорными (типовыми) реализациями, которые хранятся, например, в памяти устройства 1 управления. Перемноженные сигналы затем фильтруются (накапливаются) и анализируется уровень отфильтрованных сигналов.
Если в результате этих операций сигнал на выходе схемы корреляционной обработки мал, то это свидетельствует о том, что сигналы сильно отличаются и не похожи друг на друга. В этом случае принимается решение о несоответствии принятого сигнала некоторому эталону звука.
Если сигналы похожи друг на друга, то уровень сигнала на выходе схемы корреляционной обработки резко возрастает и принимается решение об обнаружении цели похожей на эталонный образ.
Возможна обработка сигналов с использованием в качестве эталонов некоторых ключевых образов, например слов или фраз, наиболее часто употребляемых противником (военными, экстремистами, преступниками). Например, принимается решение, что проанализированные звуки принадлежат мужчинам, говорящим на языке противника с использованием слов из военной лексики. Или звуки с высокой вероятностью соответствуют звукам танка противника определенной модели и т.д.
Анализ подобных сигналов можно проводить с использованием более простых способов обработки сигналов. Например, можно пропускать принимаемые звуковые сигналы через так называемые согласованные фильтры, передаточная характеристика которых согласована со спектром опорного сигнала, характерного для противника.
Подобный способ анализа сигналов может быть осуществлен путем многополосной фильтрации принятого, например, звукового сигнала и установки на выходе каждого полосового фильтра детектора и схемы регистрации уровня. В простейшем случае число уровней квантования спектра сигнала может равняться двум (ноль и единица).
Поскольку звуковые сигналы могут сильно отличаться по громкости, то для нормирования уровня сигнала с датчика целесообразно установить систему автоматического регулирования уровня (АРУ) анализируемого сигнала. Проанализировав сигналы на выходах пороговых схем регистрации уровня, получают информацию, на каких частотах спектра звуковых сигналов источник звука имеет гармонические составляющие, характерные для звуков, издаваемых противником.
Поясним это на следующем чисто качественном примере. Предположим, что в результате подобного анализа уровень компонентов анализируемого сигнала был превышен в полосах частот 20-50; 250-300; 600-800; 1250-1600; 9000-9500 Гц.
Этим полосам анализа можно поставить в соответствие логическую единицу. Всем другим полосам анализа ставится в соответствие логический ноль.
Таким образом, энергетический спектр сложного звукового сигнала, формально, может быть описан в частотной области в двоичной форме - в виде последовательностей нулей и единиц.
Сравнив подобную кодовую последовательность, полученную после анализа спектра сигнала, с имеющимися опорными кодовыми последовательностями - образами энергетических спектров типовых звуковых сигналов о противнике, принимают решение о принадлежности звукового источника к противнику или нет.
Звуковые сигналы вокруг робота могут представлять собой наложение различных звуков, например звуков танка и звуков от другой техники и/или живой силы противника, например автомобиля или бронетранспортера. Поэтому подобный сравнительный анализ целесообразно также проводить и для различных комбинаций (логической суммы кодов энергетических спектров) опорных сигналов.
В результате такого упрощенного анализа можно очень быстро анализировать сложные звуковые сигналы во время динамично протекающего боя и затем уже более точно вести анализ звуковой информации и планировать дальнейшие действия робота.
Например, за доли секунды можно установить, с кем придется воевать - с живой силой или техникой противника. Определить возможности и параметры противника (уровень его защищенности, вооруженности и т.д.) и в соответствии с быстро полученными расчетными данными своевременно нанести адекватный удар по противнику. Например, не вести бесполезный огонь из стрелкового вооружения робота по бронированному танку, а сразу запустить по этому противнику самонаводящуюся ракету или выстрелить по танку из гранатомета.
Анализ визуальных сигналов можно проводить аналогичными методами. Путем сопоставления опорных визуальных образов, выполненных в виде многомерных цифровых матриц.
В простейшем случае подобные матрицы также представляют собой двумерные матрицы нулей и единиц - грубой модели некоторой анализируемой "черно-белой" картинки.
Аналогом системы АРУ для звуковых сигналов при анализе подобных сигналов может использоваться метод итерационного подбора масштаба оцифрованного изображения объекта и его местоположения в кадре. Например, масштаб объекта выбирается исходя из равенства нулей и единиц двумерных матриц (площадь черного изображения равняется площади белого изображения). Местоположение анализируемого объекта в кадре поэтапно изменяется путем его смещения в стороны, вверх и вниз, зеркального разворота и поворота вокруг оси. Все эти возможные вариации изображения сравниваются с опорным изображением путем корреляционного анализа этих двухмерных матриц сигналов. Например, если черный сегмент анализируемого изображения совпал с белым сегментом опорного сигнала, то это говорит о несовпадении образов. Этот простейший анализ позволяет быстро сопоставлять с банком данных лишь грубые контуры сравниваемых образов объектов.
В более сложных алгоритмах анализа каждому элементу строки может также соответствовать информация о контрастности и цвете анализируемого изображения, а также может проводиться более детальный анализ характерных элементов принятого изображения и опорного образа по достаточно сложным алгоритмам.
Например, если в результате анализа принятого изображения установлено, что объект имеет торчащую прямолинейную часть, находящуюся в определенных пропорциях по отношению к другим характерным элементам (башне, гусеницам) анализируемого изображения, как у танка, то с высокой вероятностью можно принять решение, что обработанное изображение есть изображение танка. Дополнительная информация, например, о цвете (характере раскраски), звуках, запахах, которые исходят от этого объекта, может позволить повысить точность анализа обнаруженного объекта.
Получив оценки степени совпадения образа анализируемого объекта в различных спектрах, можно путем перемножения соответствующих вероятностей ошибок рассчитать совместную вероятность ошибки анализа и принять решение об атаке обнаруженного объекта или необходимости дальнейшего незаметного его анализа. До тех пор, пока объект полностью не проявит себя как противник.
Понятно, что такой анализ требует мощного вычислительного устройства (сервера), которое нецелесообразно размещать в каждом роботе-солдате, а целесообразно вынести в безопасное место, удаленное от места боевых действий. Например, в космос.
Роботам, имеющим соответствующие средства связи для обмена информацией с таким удаленным сервером, из космоса может быть направлена программа оптимальных действий и характеристики обнаруженной ими цели для последующего ее эффективного уничтожения. Например, направленным взрывом, пуском ракеты, путем обстрела противника пулями, с помощью газовой атаки, электрическим зарядом высокого напряжения или подрыва ядерного заряда и т.д.
Получив боевую задачу посредством радиообмена данными, робот переходит из автономного режима поиска и уничтожения живой силы и техники противника в целенаправленное выполнение этой программы. Она становится для него приоритетной. Такая программа может находиться в виде соответствующей подпрограммы внутри каждого основного цикла работы устройства 1 управления роботом и существенно изменять действия робота.
Из простого автомата, циклически повторяющего однотипные действия, робот превращается в придаток другого робота-командира. Он становится своеобразным дистанционно-управляемым устройством 3 вывода информации для робота-командира. При этом робот может переспрашивать подтверждение выполнения ответственных действий у других командиров, имеющих другие информационные коды. Например, при использовании ядерного оружия.
В варианте для увеличения зоны поражения противника перед подрывом, например, осколочной мины робот может резко изменить свое пространственное местоположение, например, подпрыгнуть вверх, быстро подъехать или прыгнуть, подплыть в сторону обнаруженного или прячущегося от робота противника.
Такой прыжок может быть обеспечен за счет работы соответствующих устройств 3 вывода информации, выполняющих функцию форсированного движителя или двигателя.
Для этих целей может наилучшим образом подойти двигатель внутреннего сгорания на электроинициируемых патронах, описанный в патенте РФ №2070979, а также активная интеллектуальная подвеска колес, описанная в заявке РФ №2006116550/09.
Основное преимущество такого двигателя заключается в быстром, надежном запуске двигателя от источника электроэнергии малой мощности. Двигатель может быть запущен за доли секунды в условиях низких температур и повышенной влажности. Он почти не требует воздуха во время работы. При минимальных габаритах и весе он позволяет развить очень большую мощность и оперативно изменять мощность двигателя в широких пределах.
Резкое пространственное перемещение робота может осуществляться посредством, например, активной подвески, определяющей местоположение корпуса 7 робота относительно земли. С использованием такой подвески робот может ездить по ступеням, камням или прыгать в требуемую сторону.
Пространственное перемещение робота может осуществляться за счет срабатывания мощной пружины, находящейся во взведенном состоянии под днищем корпуса 7 робота и распрямляющейся в результате срабатывания замка с электрическим управлением.
Подбрасывание корпуса 7 робота может быть реализовано за счет включения электромагнитного толкателя-штока или небольшого реактивного двигателя-ускорителя, установленного на днище корпуса 7 робота.
В процессе атаки противника корпус 7 робота может существенно трансформироваться. Например, во время атаки робот может "сбрасывать" маскировочный корпус 7 и существенно видоизменяться. Например, может осуществляться трансформация корпуса 7 робота, обеспечивающая роботу возможность летать или двигаться с высокой скоростью в форсированном режиме работы двигателя воздушной подушки робота. Сама подушка может быть установлена в нижней части корпуса 7 робота и надуваться за доли секунды перед атакой противника.
В более сложных алгоритмах управления робот может корректировать свои действия во время атаки на основе алгоритмов, экстраполирующих (предсказывающих) на определенном отрезке времени перемещение противника в пространстве. Например, если цель стала не видна по причине выхода из строя устройств ввода 2 информации робота или она скрылась в листве, траве, облаках дыма, тумане. В подобных ситуациях робот может продолжить обстрел цели в направлении ее возможного движения. И, например, перейти из режима прицельной стрельбы в режим пространственно-статистического поражения цели залпом или очередью залпов.
Возможен вариант работы робота, когда, израсходовав все боезаряды, при очередной регистрации движения противника вблизи от себя робот осуществляет подрыв заряда и самоуничтожается.
Основная функция роботов-"разведчиков" может состоять в сборе всевозможной информации о противнике. Они могут иметь минимальный арсенал для поражения противника, но обладать широким спектром устройств для сбора информации о противнике.
Современные нанотехнологии позволяют создавать роботов очень малых размеров, сопоставимых с размерами насекомых, птиц или мелких животных. Подобный робот может представлять собой миниатюрный вертолет или очень маленький беспилотный самолет, снабженный системами наблюдения за противником и системой связи с другими роботами.
Доставку таких роботов в район 25 вероятного нахождения противника можно осуществлять из стрелкового оружия.
Быстрый полет платформы 5, выполненной в виде пули или небольшого снаряда, практически не возможно обнаружить современными радарными устройствами и сбить платформу 5 в воздухе.
Маскировать таких роботов не обязательно.
Выработав свой ресурс полета в районе вероятного нахождения противника, робот может завершить работу и осуществить атаку с воздуха на наиболее важную цель подобно камикадзе. Например, спикировать на склад боезарядов противника или атаковать командира противника.
Очевидно, что общее число всевозможных вариантов построения роботов определяется путем различных комбинаций всевозможных видов и вариантов выполнения устройств 2 ввода информации, устройства управления 1 с теми или иными функциями и программным обеспечением и устройств 3 вывода информации, а также различных вариантов доставки роботов в район вероятного нахождения противника.
Рассмотренные выше примеры позволяют выделить следующие преимущества роботов перед людьми.
В отличие от живых солдат и офицеров различного ранга, на воспроизводство и подготовку которых необходимы длительные временные сроки (порядка 18-45 лет), промышленное производство подавляющего большинства роботов-солдат может составить от нескольких десятков минут до нескольких часов или месяцев.
Процесс производства таких роботов-солдат может быть поставлен на поток подобно производству персональных компьютеров, принтеров, ксероксов, модемов.
Планирование объемов производства роботов и их функциональных возможностей может оперативно меняться в соответствии с текущей военной и политической ситуацией в мире.
Затраты на разработку и производство роботов со временем будут снижаться, а затраты на воспроизводство и подготовку живых солдат будут только расти. Это непосредственно следует из общеизвестных экономических закономерностей, свидетельствующих об устойчивой инфляции практически во всех высокоразвитых странах мира и снижающихся ценах на радиоэлектронную продукцию, компьютеры, продукцию машиностроения.
В условиях демографического спада роботизация армии представляется единственно возможным и промышленно осуществимым путем роста обороноспособности и безопасности.
В случае повреждения отдельных узлов робота эти узлы могут быть оперативно заменены. Например, еще на более совершенные.
После такой замены узлов робот может снова принимать полноценное и даже более эффективное участие в проведении боевых операций, чем раньше.
Функциональные возможности роботов-солдат со временем будут возрастать.
Программы работы роботов могут быть многократно проверены с использованием методов математического моделирования. Эти методы позволяют моделировать на компьютере любые боевые ситуации. В том числе и ситуации с гибелью большого числа роботов.
Моделирование этих ситуаций не требует существенных материальных затрат и может быть проведено не в реальном пространстве и времени, а в виртуальном пространстве при резко ускоренном ходе времени.
Современные мощные компьютеры позволяют моделировать и анализировать сотни боевых действий и даже сражений за одну секунду. Затраты на эти работы могут быть существенно меньше, чем затраты на подготовку военнослужащих и проведение реальных боевых учений (например, на учебные запуски баллистических ракет). Учений в реальном времени и трехмерном пространстве.
Действия каждого робота, принимающего участие в боевых виртуальных сражениях, могут быть тщательно проанализированы, и в случае необходимости в программы, по которым работают роботы, могут быть оперативно внесены уточнения и дополнения.
Информационный обмен между роботами может протекать значительно более быстро, чем между живыми людьми - военнослужащими.
Время принятия решений и реакция на действия противника у роботов может быть гораздо выше, чем у живых людей.
Группировка из нескольких миллионов роботов может быть высокоорганизованной, высокобоеспособной армией.
У роботов может быть свой "генерал", начальники и подчиненные. При необходимости, роботов-"солдат", "офицеров" и "генералов" можно оперативно, дистанционно перепрограммировать (переобучать) на другую роль или боевую задачу.
Учитывая значительно более высокие вычислительные возможности компьютеров по сравнению с человеком, роботы могут выступать не только как более эффективные исполнители военно-тактических задач по уничтожению противника, но и как более эффективные полководцы.
Роботы не представляют опасность для человечества как вида.
Они не способны замышлять заговоры, организовывать путчи, свергать законно избранную власть, устраивать революции или взбунтоваться и вступить в борьбу с человечеством как видом, осознав, например, свое превосходство над человеком.
Это непосредственно следует из того, что программы, по которым работают роботы, пишутся людьми, а не роботами. И подобные программы всегда представляют собой набор заранее известных действий в ограниченной области пространства и времени.
Самостоятельно выйти за эти рамки ограничений роботы не могут.
Предложенный способ можно также использовать для подавления действий экстремистов, хулиганов и иных преступных элементов.
В этих случаях роботы могут выступать в роли полицейских и решать задачи по поражению противника без его физического уничтожения - в более мягкой форме. Например, посредством стрельб в сторону противника газовыми зарядами, резиновыми пулями. Путем поражения противника электрическим разрядом высокого напряжения, красящими и несмываемыми жидкостями, воздействием на противника звуковыми сигналами высокого уровня и т.д. Для этого роботы должны быть оснащены соответствующими устройствами 3 вывода информации.
Подобные действия роботов могут быть дополнены звуковыми информационными сигналами, предупреждающими противника о бессмысленности его сопротивления и объясняющими ему наиболее оптимальные схемы поведения. Например, чтобы противник стоял смирно с поднятыми руками и не двигался, пока к нему не приблизятся люди - полицейские - и не арестуют его. В противном случае он будет насильно обездвижен путем газовой атаки, воздействия зарядов электричества или его обстрела резиновыми пулями.
Предложенные технические решения представляют собой реальный путь предотвращения угрозы человечеству со стороны агрессивных стран, вооруженных ядерным оружием и ракетами большого радиуса действия.
Например, для уничтожения баллистических ракет с разделяющимися головками с ядерными зарядами использование описанных выше технических решений с использованием космических роботов представляется наиболее эффективным средством по сравнению со всеми известными аналогами.
При определенной плотности космической группировки роботов, вооруженных подобным оружием, можно создать в космосе эффективную систему зашиты от ракетно-ядерного удара противника - своеобразный космический зонтик.
При определенной плотности быстролетящих в космосе поражающих элементов становится невозможно увернуться от летящих по неизвестным траекториям и с высокой встречной скоростью поражающих элементов путем изменения траектории полета боеголовки или ракеты. Вектора скорости подобных поражающих элементов будут случайными, и, следовательно, орбиты их полета будут непредсказуемо меняться и пересекаться во времени и пространстве. Облететь в космосе подобную "космическую метель" не представляется возможным. Все запущенные противником ракеты и боеголовки с вероятностью близкой к единице будут поражены в космосе или верхних слоях атмосферы.
Этот результат достигается за счет неизбежной гибели роботов, находящихся на низких орбитах, атакующих космические объекты противника.
Ценой гибели этих роботов удается защитить живых людей, в том числе и военнослужащих, находящихся на земле в безопасном месте (в бомбоубежище).
Большинство роботов, находящихся на высоких орбитах, например геостационарных, при этом останутся невредимыми. Поскольку вероятность их поражения быстро летящими поражающими элементами не велика. Они могут обеспечить реализацию своих функций по управлению другими роботами или осуществить замену (ротацию) погибших роботов.
Некоторое избыточное число роботов, находящихся на геостационарных орбитах, может обеспечить высокий уровень защиты во время, например, нескольких ракетно-ядерных ударов противника.
Таким образом, наиболее морально приемлемыми, этичными и технически совершенными способами ведения боевых действий, которые сейчас неизбежно возникают между людьми, можно считать способы, предполагающие удаление людей - военнослужащих - на безопасное расстояние или даже полное исключение человека из процесса ведения боевых действий.
Человек принимает опосредованное, косвенное участие в боевых действиях. Он не убивает себе подобных в соответствии с общепризнанными нормами морали, а разрабатывает и производит роботов.
Роботы будут защищать жизнь мирных людей от агрессивных действий граждан, не признающих общепризнанные нормы поведения.
В перспективе роботы если и будут воевать, то только друг с другом, а не с людьми. Человеку воевать с роботами в реальном пространстве и времени бесперспективно в силу указанных выше преимуществ роботов.
Возможность математического моделирования подобных войн с участием роботов исключает необходимость их частого осуществления в реальном пространстве и времени, в котором живут люди. Эти войны будут происходить преимущественно в виртуальном пространстве.
Таким образом, предложенные технические решения отвечают всем критериям патентоспособности изобретения (по новизне, изобретательскому уровню и промышленной применимости) и являются актуальными, общественно полезными изобретениями.
Промышленная применимость
Изобретение применимо в различных родах войск вооруженных сил, специальных подразделениях, в полиции в качестве принципиально нового интеллектуального оружия, способного самостоятельно осуществлять поиск и поражение живой силы и/или техники противника.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ДИСТАНЦИОННОГО ВОЗДЕЙСТВИЯ ВОЛНОВЫМИ СИГНАЛАМИ НА ОПАСНЫЙ ОБЪЕКТ ДАННОГО ТИПА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2500035C2 |
| СПОСОБ УДАЛЕНИЯ ОДНОГО ОБЪЕКТА ИЗ ДРУГОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2376207C2 |
| Способ дистанционного поражения оптико-электронных приборов противника | 2022 |
|
RU2786890C1 |
| ЗАМАСКИРОВАННОЕ РУЧНОЕ ОРУЖИЕ | 1993 |
|
RU2072079C1 |
| УСТРОЙСТВО ЗАЩИТЫ ОБЪЕКТА | 2006 |
|
RU2326444C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ ОСЛЕПЛЕНИЯ ЧЕЛОВЕКА, НАХОДЯЩЕГОСЯ НА САМОДВИЖУЩЕМСЯ ТЕХНИЧЕСКОМ СРЕДСТВЕ, ЛАЗЕРНЫМ ИЗЛУЧЕНИЕМ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2492120C2 |
| РАКЕТНЫЙ КОМПЛЕКС "СТРАЖ" | 2007 |
|
RU2423659C2 |
| Система Костенюка быстрой доставки людей и грузов с поля или на поле боя | 2023 |
|
RU2809726C1 |
| КРЫЛАТАЯ РАКЕТА С АВТОНОМНЫМ НЕОБИТАЕМЫМ ПОДВОДНЫМ АППАРАТОМ-МИНОЙ | 2018 |
|
RU2714274C2 |
| МНОГОЦЕЛЕВОЕ ПРОТИВОТАНКОВОЕ (ЗЕНИТНОЕ) СРЕДСТВО | 2011 |
|
RU2492402C2 |
Изобретение относится к военной технике, в частности к полностью автоматизированным системам поражения противника. Способ заключается в доставке в район вероятного нахождения противника платформы с находящимся внутри платформы роботом. Робот снабжен связанными между собой источником питания, устройствами его управления и перемещения, предназначенными для обнаружения противника, и устройствами поражения противника. Платформа выполнена с возможностью изменения своей формы и запрограммирована на включение и последующую работу устройства ее управления в автоматическом режиме в соответствии с программой. В качестве устройства, предназначенного для обнаружения противника, используют датчик движения, а в качестве устройства перемещения робота используют электродвигатели. Техническим результатом является повышение эффективности поражения живой силы и техники противника. 21 з.п. ф-лы, 9 ил.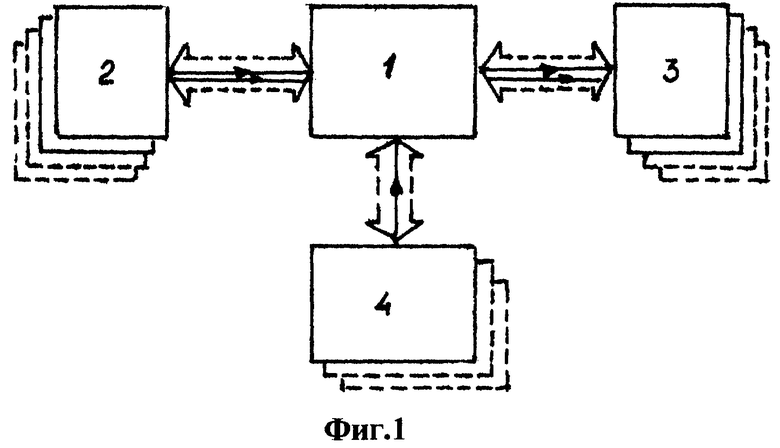
| Прибор для теплообмена | 1917 |
|
SU4160A1 |
| RU 94001879 A1, 10.04.1997 | |||
| Корообдирный станок | 1927 |
|
SU6183A1 |
| DE 20317995 U1, 19.02.2004. | |||

